技术特征:
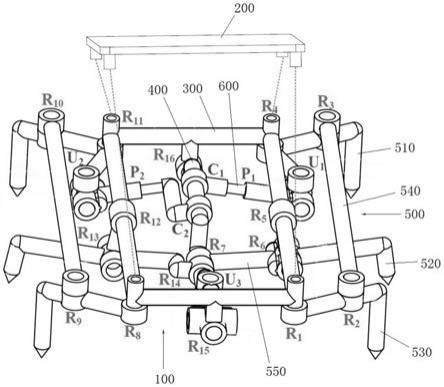
1.一种爬行机器人,包括桁架主体和负载平台,其特征在于,所述桁架主体包括:用于支撑负载平台的支撑桁架;驱动用的曲轴;左右对称的两组运动支链;用于分别驱动两组所述运动支链的两组传动支链;所述支撑桁架包括左右对称的两个支撑杆,两个所述支撑杆之间通过前后两个连接杆固定连接,所述支撑杆具有前连接部和后连接部;所述曲轴的两端转动设置于两个所述连接杆上;所述运动支链包括前足、后足和连动杆;其中所述前足包括前足部、前横杆和前纵杆,所述前横杆与前连接部相铰接,所述前纵杆与所述前横杆相连接,所述后足包括后足部和后横杆,所述后横杆与所述后连接部相铰接,所述连动杆分别与所述前横杆、所述后横杆相铰接,并且所述连动杆与所述支撑杆之间互相平行,从而使所述前足部与所述后足部具有相同的步幅;所述传动支链包括第一连接座、第二连接座和用于控制步长的行程杆;其中所述第一连接座与所述第二连接座分别铰接在所述曲轴的第一连杆颈与所述前纵杆上,所述行程杆的行程大小是可调的,所述行程杆的一端固定在第一连接座上,所述行程杆的另一端与所述第二连接座之间配合连接;所述曲轴的转动,能够推动所述前足运动,利用所述连动杆带动所述后足同步运动,通过调节两组所述传动支链中所述行程杆的相对行程大小,进行所述爬行机器人的直线爬行、左转和右转。2.如权利要求1所述的爬行机器人,其特征在于,两个所述支撑杆和两个所述连接杆首尾相连形成为矩形。3.如权利要求2所述的爬行机器人,其特征在于,所述曲轴形成为2ru驱动支链,所述曲轴的一端通过转动副与其中一个所述连接杆连接,所述曲轴的另一端通过万向铰与另外一个所述连接杆连接。4.如权利要求1所述的爬行机器人,其特征在于,所述第一连接座为圆柱副连接座,其具有转动副和移动副,所述第一连接座包括套体和沿所述套体的径向向外延伸的座体,所述套体套设于所述曲轴的第一连杆颈,所述行程杆设置于所述座体上,其中所述行程杆与所述曲轴的第一连杆颈相垂直。5.如权利要求4所述的爬行机器人,其特征在于,所述第二连接座为万向铰连接座,其具有互相垂直的转动副和转动副,所述第二连接座包括互相铰接的两个t形连接件,其中一个所述t形连接件的自由端与所述前纵杆相铰接,所述行程杆的另一端滑动连接在另外一个所述t形连接件的自由端。6.如权利要求1所述的爬行机器人,其特征在于,所述前横杆和所述前纵杆之间相垂直。7.如权利要求1所述的爬行机器人,其特征在于,所述运动支链还包括用于左右步态调整的中足和随动杆,所述中足包括中足部、中横杆和中竖杆,所述随动杆的一端铰接在所述曲轴的第二连杆颈上,所述中竖杆的一端铰接在所述支撑杆上,所述中竖杆的另一端与所述随动杆的另一端相铰接,所述中横杆与所述中竖杆之间固定连接。
8.如权利要求7所述的爬行机器人,其特征在于,所述曲轴的第一连杆颈和第二连杆颈的相位角不同。9.如权利要求1所述的爬行机器人,其特征在于,所述支撑桁架上设有用于驱动所述曲轴运动的伺服电机。10.如权利要求1所述的爬行机器人,其特征在于,通过调节两组所述传动支链中所述行程杆的相对行程大小为相同,进行所述爬行机器人的直线爬行,并根据所述行程杆的行程大小调节直线爬行的速度;通过调节两组所述传动支链中所述行程杆的相对行程大小为不相同,进行所述爬行机器人的左转和右转,并根据两个所述行程杆的行程大小的差值调节左转和右转的速度。
技术总结
本发明提供了一种爬行机器人,其包括桁架主体和负载平台,桁架主体包括支撑桁架、曲轴、两组运动支链和两组传动支链;支撑桁架包括左右对称的两个支撑杆,两个支撑杆之间通过前后两个连接杆固定连接,支撑杆具有前连接部和后连接部,曲轴的两端转动设置于两个连接杆上,运动支链包括前足、后足和连动杆;前足包括前足部、前横杆和前纵杆,前足部与后足部具有相同的步幅;传动支链包括第一连接座、第二连接座和用于控制步长的行程杆,行程杆的行程大小是可调的;曲轴的转动,能够推动前足运动,利用连动杆带动后足同步运动,通过调节两组传动支链中行程杆的相对行程大小,进行爬行机器人的直线爬行、左转和右转。本发明具有可靠性高的优点。优点。优点。
技术研发人员:李兵 高长青 徐鹏 张阳
受保护的技术使用者:哈尔滨工业大学(深圳)
技术研发日:2022.02.10
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。