1.本实用新型涉及转向油泵领域,具体是控制器、控制系统、转向油泵和车辆。
背景技术:
2.转向油泵,在液压动力转向系中,将机械能转变为液压能的液压元件。
3.现有技术中,提供了一篇名称为:一种双源电动液压助力转向泵系统,申请号为:202020225856.x的专利文献,其中,该专利文献具体包括双源电动液压助力转向泵、高压控制器、24v低压控制器、高压电池包、24v蓄电池、can 通讯模块和警示装置,且在该专利文献的说明书内[0032]段,提出了
‘
双源电动液压助力转向泵正常启动时,高压电机绕组与低压电机绕组同时工作,由于输出轴是公用的,双绕组电机在高压电机绕组运行的同时,低压电机绕组保持0 扭矩输出,当高压电机绕组出现故障时,低压电机绕组直接运行’。该专利文献采用上述设置方式,使得双绕组电机的高压电机绕组和低压电机绕组同时通电,且可在高压电机绕组出现故障时切换至低压电机绕组,虽然能够避免车辆失去转向助力,但增大了双绕组电机的电能消耗,不利于节约电能。
[0004]
因此,现有技术中,在避免车辆失去转向助力的前提下,如何提供一种用于双绕组电机、且能够节约电能的控制部件,成为要解决的技术问题。
技术实现要素:
[0005]
为解决现有技术中,在避免车辆失去转向助力的前提下,如何提供一种用于双绕组电机、且能够节约电能的控制部件的技术问题,本实用新型提供控制器、控制系统、转向油泵和车辆。
[0006]
为实现上述目的,本实用新型采取的技术方案为:
[0007]
根据本实用新型的一个方面,提供一种控制器,包括第一控制模块和第二控制模块;
[0008]
所述第一控制模块和所述第二控制模块电性连接,所述第一控制模块和所述第二控制模块可分别同时接收到触发信号;
[0009]
所述第一控制模块和所述第二控制模块分别用于根据所述触发信号和至少一个预设条件输出电能,其中,所述第一控制模块用于向所述第二控制模块发送其中一个所述预设条件。
[0010]
进一步的,所述第一控制模块用于生成故障电信号,且用于向所述第二控制模块发送所述故障电信号,所述故障电信号为其中一个所述预设条件。
[0011]
进一步的,所述第一控制模块输出的电能为第一电能,所述第二控制模块输出的电能为第二电能,所述第一电能的电压高于所述第二电能的电压。
[0012]
进一步的,所述第一控制模块可接收第一输入电能和第二输入电能,其中,所述第二输入电能可转变为所述第一电能;
[0013]
所述第二控制模块可接收所述第一输入电能,其中,所述第一输入电能可转变为
所述第二电能。
[0014]
进一步的,所述第一控制模块设置有第一逆变器;所述第二控制模块设置有第二逆变器;
[0015]
所述第二输入电能通过所述第一逆变器转变为所述第一电能;
[0016]
所述第一输入电能通过所述第二逆变器转变为所述第二电能。
[0017]
进一步的,所述第二控制模块可接收第二电信号;
[0018]
所述第二电信号用于生成为其中另一个所述预设条件。
[0019]
根据本实用新型的一个方面,提供一种控制系统,包括如前述的控制器,还包括vcu、第一电池、第二电池和双线圈电机;
[0020]
所述第一电池分别电性连接于所述第一控制模块和所述第二控制模块;
[0021]
所述第二电池电性连接于所述第一控制模块;
[0022]
所述第一控制模块和所述第二控制模块分别电性连接于所述双线圈电机。
[0023]
根据本实用新型的一个方面,提供一种转向油泵,包前述的控制器,还包括双线圈电机和泵体;
[0024]
所述泵体的内部设置有叶片,所述双线圈电机设置在所述泵体的外部,其中,所述双线圈电机用于驱动所述叶片;
[0025]
所述控制器设置于所述双线圈电机外,其中,所述双线圈电机的其中一个线圈电性连接于所述第一控制模块,所述双线圈电机的其中另一个线圈电性连接于所述第二控制模块。
[0026]
进一步的,还包括储油腔和滑阀;
[0027]
所述储油腔与所述泵体被设置为一体;
[0028]
所述泵体上设置有排油口,其中,所述泵体被设置有排油路径,所述排油口、所述滑阀和所述储油腔分别为所述排油路径的一部分,所述滑阀沿着所述排油路径的延伸方向被限制在所述排油口和所述储油腔之间。
[0029]
根据本实用新型的一个方面,提供一种车辆,包括如前述的转向油泵。
[0030]
上述技术方案具有如下优点或者有益效果:
[0031]
本实用新型提供的控制器,具有双线圈电机的转向油泵仅能够接收到控制器的第一控制模块发出的电能,或者接收到第二控制模块发出的电能,从而双线圈电机的高压线圈和低压线圈之一能够工作,相对于现有技术中的一种双源电动液压助力转向泵系统,至少节省了其中一个线圈所消耗的电能,从而减少了双线圈电机的电能消耗。
附图说明
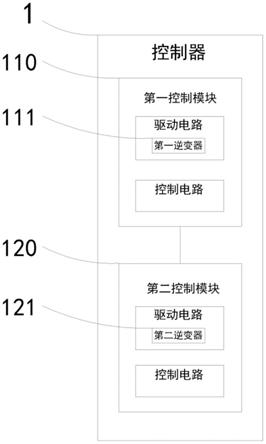
32.图1为本实用新型实施例1提供的控制器的电性连接图;
[0033]
图2为本实用新型实施例2提供的控制系统的电性连接图;
[0034]
图3为本实用新型实施例3提供的转向油泵的结构示意图;
[0035]
图4为本实用新型实施例3提供的转向油泵的结构示意图。
具体实施方式
[0036]
实施例1:
[0037]
在本实施例中,参见图1,提供一种控制器1,包括第一控制模块110和第二控制模块120;
[0038]
第一控制模块110和第二控制模块120电性连接,第一控制模块110和第二控制模块120可分别同时接收到触发信号;
[0039]
第一控制模块110和第二控制模块120分别用于根据触发信号和至少一个预设条件输出电能,其中,第一控制模块110用于向第二控制模块120发送其中一个预设条件。
[0040]
在本实施例中,第一控制模块110被优选的设置为高压控制模块,第二控制模块120被优选的设置为低压控制模块。应当理解的是,在其他实施例中,第一控制模块110既可以是高压控制模块,又可以是低压控制模块;同理,第二控制模块120即可以是高压控制模块,又可以是低压控制模块。
[0041]
在实际应用中,控制器1的控制对象为双线圈电机。在本实施例中,双线圈电机被设置为具有高压线圈和低压线圈的双线圈电机。
[0042]
第一控制模块110与双线圈电机的高压线圈电性连接,第二控制模块120 与双线圈电机的低压线圈电性连接。
[0043]
第一控制模块110用于生成故障电信号,且用于向第二控制模块120发送故障电信号,故障电信号为其中一个预设条件。
[0044]
在本实施例中,第一控制模块110和第二控制模块120之间电性连接,第一控制模块110可生成故障电信号,并将故障电信号可发送至第二控制模块 120;换个角度说,第二控制模块120至少用于通过故障电信号监测第一控制模块110,当第二控制模块120接收到第一控制模块110发出的故障电信号时,第一控制模块110被中断,而第二控制模块120被导通,反之,当第二控制模块120没有接收到第一控制模块110发出的故障电信号时,第一控制模块110 被导通,而第二控制模块120被中断。
[0045]
在实际应用中,控制器1的控制目的是驱动双线圈电机转动。在本实施例中,在第一控制模块110被导通的情况下,优先的采用第一控制模块110驱动双线圈电机转动;在第一控制模块110由于故障而被中断的情况下,采用第二控制模块120驱动双线圈电机转动。
[0046]
在实际应用中,控制器1是否需要驱动双线圈电机转动,需要根据接收到的触发信号而做出判断结果。当本实施例的控制器1应用在具有双线圈电机的转向油泵上时,转向油泵上的控制器1与车辆的vcu电性连接,vcu与控制器1 之间执行can总线协议,从而控制器1能够接收到vcu发出的canh信号和canl 信号,canh信号和canl信号即为触发信号;第一控制模块110和第二控制模块120分别可同时接收到canh信号和canl信号,并且canh信号和canl信号的逻辑值作为是否实际触发第一控制模块110和第二控制模块120的依据,其中,canh信号和canl信号的逻辑值只有
‘0’
和
‘1’
两种。
[0047]
当控制器1仅接收到触发信号,如果触发信号的逻辑值为1时,说明车辆已经处于运行状态,且此时的车辆并没有被做出转向操作,因此,当前的控制器1的第一控制模块110和第二控制模块120分别处于被中断状态,从而第一控制模块110和第二控制模块120不需要驱动双线圈电机;
[0048]
当控制器1仅接收到触发信号,如果触发信号的逻辑值为0时,说明车辆已经处于运行状态、且此时的车辆被做出转向操作,因此,当前的控制器1的第一控制模块110和第二控制模块120应当根据是否具有第一控制模块110的故障电信号进行判断,其第一判断结果
是:如果触发信号的逻辑值为0、且没有故障电信号,则中断第二控制模块120,导通第一控制模块110,即,采用第一控制模块110驱动双线圈电机;其第二判断结果是:如果触发信号的逻辑值为0,且具有故障电信号,则中断第一控制模块110,导通第二控制模块120,即,采用第二控制模块120驱动双线圈电机。
[0049]
在实际应用中,控制器1的第一控制模块110和第二控制模块120分别具有控制电路和驱动电路,其中的驱动电路实际电性连接于双线圈电机,而控制电路用于控制驱动电路的导通和中断;换个角度说,如果需要将第一控制模块 110导通,需要第一控制模块110接收的触发信号的逻辑值为0、并且第一控制模块110至少没有生成故障电信号、以及在控制电路呈被通电状态下,控制电路才能够将驱动电路导通,实现第一控制模块110的导通;第二控制模块120 的导通条件与第一控制模块110的导通条件相似,这里不再赘述。前述内容中提出的预设条件,实际上至少包括了第一控制模块110是否生成故障电信号,以及第二控制器1是否接收到故障电信号。应当理解的是,在后文中,还提出了额外的条件作为预设条件之一,这里暂且不提。
[0050]
第一控制模块110输出的电能为第一电能,第二控制模块120输出的电能为第二电能,第一电能的电压高于第二电能的电压。
[0051]
第一控制模块110可接收第一输入电能和第二输入电能,其中,第二输入电能可转变为第一电能;
[0052]
第二控制模块120可接收第一输入电能,其中,第一输入电能可转变为第二电能。
[0053]
第一控制模块110和第二控制模块120的控制电路的供电,分别来自于车辆的低压电源;低压电源的电压应当在48v以下,例如:24v、48v;在实际应用中,当车辆被启动时,低压电源即可将电能传输至控制电路。
[0054]
第一控制模块110的驱动电路所输出的第一电能,来自于车辆的高压电源;高压电源的电压通常在300v以上,例如:乘用电动汽车的电压可设置为336v、 384v,而商用电动汽车的电压可设置为580v;在实际应用中,当控制电路将驱动电路导通时,高压电源输出的电能经过驱动电路转变为第一电能,第一电能被传输至双线圈电机的高压线圈,即,双线圈电机被第一控制模块110驱动。
[0055]
第二控制模块120的驱动电路的第二电能,来自于车辆的低压电源,此处的低压电源与前述的低压电源为同一个低压电源;在实际应用中,当控制电路将驱动电路导通时,低压电源输出的电能经过驱动电路转变为第二电能,第二电能被传输至双线圈电机的低压线圈,即,双线圈电机被第二控制模块120驱动。
[0056]
在实际应用中,当控制器1被设置在具有双线圈电机的转向油泵上,且车辆在运行的过程中被做出转向操作,如果第一控制模块110发生故障,则双线圈电机面临着失去电能,导致车辆失去转向油泵提供的转向助力的情况发生;此时,第二控制模块120能够接收到第一控制模块110发出的故障电信号,使得第二控制模块120的驱动电路被导通,从而此时的双线圈电机的低压线圈能够接收到第二控制模块120发出的电能,并且双线圈电机利用第二控制模块120 发出的电能继续工作,可避免车辆失去转向油泵提供的助力。
[0057]
现有技术中(一种双源电动液压助力转向泵系统,申请号为: 202020225856.x),
‘
双源电动液压助力转向泵正常启动时,高压电机绕组与低压电机绕组同时工作’,换个角度来说,双源电动液压助力转向泵的高压电机绕组和低压电机绕组同时能够接收到电能。
[0058]
而本实施例中,具有双线圈电机的转向油泵(相当于现有技术中的双源电动液压助力转向泵)仅能够接收到控制器1的第一控制模块110发出的电能,或者接收到第二控制模块120发出的电能,从而双线圈电机的高压线圈和低压线圈之一能够工作,相对于现有技术中的一种双源电动液压助力转向泵系统,至少节省了其中一个线圈所消耗的电能,从而减少了双线圈电机的电能消耗。
[0059]
因此,本实施例提供的控制器1,解决了现有技术中,在避免车辆失去转向助力的前提下,如何提供一种用于双绕组电机、且能够节约电能的控制部件的技术问题。
[0060]
进一步的,在前述内容中,双线圈电机可接收到第一电能和第二电能之一,其中,如果双线圈电机被设置为直流电机,则高压线圈和低压线圈分别应当被通入呈直流电的第一电能和第二电能;如果双线圈电机被设置为交流电机,则高压线圈和低压线圈分别应当被通入呈交流电的第一电能和第二电能。
[0061]
具体的,如果双线圈电机被设置为直流电机,则,第一控制模块110的驱动电路应当接收来自于高压电源的呈直流的第一输入电能,并且驱动电路用于将呈直流的第一输入电能转换为第一电能,第一电能被直接传输至双线圈电机的高压线圈;以及,第二控制模块120的驱动电路应当接收来自于低压电源的呈直流的第二输入电能,并且驱动电路用于将呈直流的第二输入电能转换为第二电能,第二电能被直接传输至双线圈电机的低压线圈。
[0062]
具体的,如果双线圈电机被设置为交流电机,则,参见图1,第一控制模块110设置有第一逆变器111;第二控制模块120设置有第二逆变器121;
[0063]
第二输入电能通过第一逆变器111转变为第一电能;
[0064]
第一输入电能通过第二逆变器121转变为第二电能。
[0065]
应当理解的是,第一逆变器111为第一控制模块110的驱动电路的其中一部分,第二逆变器121为第二控制模块120的驱动电路的其中一部分。
[0066]
其中,第一控制模块110的驱动电路应当接收来自于高压电源的呈直流状态的第一输入电能,第一逆变器111用于将呈直流状态的第一输入电能转变为呈交流状态的第一电能,呈交流状态的第一电能被直接传输至双线圈电机的高压线圈;以及,第二控制模块120的驱动电路应当接收来自于低压电源的呈直流状态的第一输入电能,第二逆变器121用于将呈直流状态的第一输入电能转变为呈交流状态的第二电能,呈交流状态的第二电能被直接传输至双线圈电机的低压线圈。
[0067]
进一步的,第二控制模块120可接收第二电信号;
[0068]
第二电信号用于生成为其中另一个预设条件。
[0069]
其中,在前述内容中,已经提出:当控制器1的第一控制模块110出现故障时,使得双线圈电机的高压线圈失去电能,从而可导致车辆失去转向油泵提供的助力的负面效果。
[0070]
在实际应用中,还存在另外一种情况,也可能导致车辆失去转向油泵提供的助力的负面效果,具体是:在第一控制模块110没有生成故障电信号的情况下,有可能在位于控制器1与双线圈电机之间的电路处、或者有可能在双线圈电机的高压线圈处,形成故障,导致双线圈电机的电机轴无法转动。
[0071]
所以,通过第二控制模块120获取到双线圈电机所发出的转速电信号,并将转速电信号作为第二电信号,用来判断当前的双线圈电机的高压线圈是否能够驱动电机轴转动。在第二控制模块120中预先存储有转速阈值,转速电信号转换为转速值,并将转速值与转速
阈值进行对比,如果转速值满足了转速阈值,则代表当前的双线圈电机的高压线圈,能够驱动电机轴转动;反之,如果转速值不满足转速阈值,则代表当前的双线圈电机的高压线圈,不能够驱动电机轴转动。
[0072]
应当理解的是,转速阈值可以是一个参考数值,例如:参考值为大于0,当接收到转速电信号时,如果转速值为0,则不满足转速阈值,如果转速值大于0,则满足转速阈值。将转速电信号与转速阈值的比较结果作为前述的其中另一个预设条件。
[0073]
第二电信号可以采用现有技术的结构生成,例如:可在双线圈电机上设置有霍尔传感器,通过霍尔传感器采集双线圈电机的电机轴转速,即可获得并输出第二电信号。
[0074]
实施例2:
[0075]
在本实施例中,参见图2,提供一种控制系统,包括如前述实施例1的控制器1,还包括vcu2、第一电池3、第二电池4和双线圈电机5;
[0076]
第一电池3分别电性连接于第一控制模块110和第二控制模块120;
[0077]
第二电池4电性连接于第一控制模块110;
[0078]
第一控制模块110和第二控制模块120分别电性连接于双线圈电机5。
[0079]
其中,双线圈电机5实际被集成设置在转向油泵上,vcu2、第一电池3、第二电池4和转向油泵分别被设置在车辆上。
[0080]
vcu2用于接收车辆的点火开发所发出的电信号;点火开关至少包括acc档、 on档和lock档;
[0081]
当点火开关被设置为acc档导通时,vcu2可接收到点火开关发出的第一电信号;此时,vcu2将第一电池3与控制器1之间导通,其中,第一电池3输出的电能被输送至第一控制模块110的控制电路和第二控制模块120的控制电路,使得控制器1整体保持获得控制电的上电状态、但此时的控制器1没有向外(向双线圈电机5)输出电能。
[0082]
当点火开关被设置为on档导通时,vcu2可接收到点火开关发出的第二电信号;此时,vcu2可将第一电池3与第二控制模块120的驱动电路导通,且vcu2 可将第二电池4与第一控制模块110的驱动电路导通;但是,此时的控制器1 没有向外(向双线圈电机5)输出电能。当vcu2驱动第一控制模块110的控制电路将驱动电路导通时,第二电池4输出的电能才能够通过第一控制模块110 的驱动电路传输至双线圈电机5的高压线圈;或者,当vcu2驱动第二控制模块 120的控制电路将驱动电路导通时,第一电池3输出的电能才能够通过第二控制模块120的驱动电路传输至双线圈电机5的低压线圈。
[0083]
此外,当点火开关被设置为lock档,vcu2可接收到点火开关发出的第三电信号;此时,vcu2切断第二电池4与第一控制模块110,使得第一控制模块 110的驱动电路输出的第一电能的电压下降,直至第一电能的电压降低至安全电压时,vcu2切断第一电池3与第一控制模块110和第二控制模块120,从而控制器1失电。
[0084]
本实施例的控制系统,第一控制模块110和第二控制模块120之间电性连接,其具体作用和效果与前述实施例1中的第一控制模块110和第二控制模块 120的体作用和效果一致,这里不再赘述。
[0085]
本实施例的控制系统,第二控制模块120可接收双线圈电机5的转速电信号,转速电信号的作用和效果与前述的实施例1的转速电信号的作用和效果一致,这里不再赘述。
[0086]
本实施例所提供的控制系统,可应用在车辆上;车辆至少包括电动乘用车和电动
商用车。
[0087]
实施例3:
[0088]
在本实施例中,参见图3、图4,提供一种转向油泵,包括如前述实施例1 的控制器1,还包括双线圈电机5和泵体6;
[0089]
泵体6的内部设置有叶片7,双线圈电机5设置在泵体6的外部,其中,双线圈电机5用于驱动叶片7;
[0090]
控制器1设置于双线圈电机5外,其中,双线圈电机5的其中一个线圈电性连接于第一控制模块110,双线圈电机5的其中另一个线圈电性连接于第二控制模块120。
[0091]
其中,控制器1被集成设置在双线圈电机5上,双线圈电机5的电机轴用于驱动泵体6内的叶片7。控制器1的第一控制模块110电性连接于双线圈电机5的高压线圈,而控制器1的第二控制模块120电性连接于双线圈电机5的低压线圈。
[0092]
本实施例中,第一控制模块110和第二控制模块120的作用和功能,分别与前述实施例1中的第一控制模块110和第二控制模块120的作用和功能一致,这里不再赘述。
[0093]
进一步的,参见图3,还包括储油腔8和滑阀9;
[0094]
储油腔8与泵体6被设置为一体;
[0095]
泵体6上设置有排油口,其中,泵体6被设置有排油路径,排油口、滑阀 9和储油腔8分别为排油路径的一部分,滑阀9沿着排油路径的延伸方向被限制在排油口和储油腔8之间。
[0096]
具体的,参见图3、图4,泵体6还包括定子10、泵轴11、配油盘12、转子13、回油口14和排油口15;定子10呈固定状态的被设置在泵体6的内部,定子10、转子13和配油盘12分别被泵轴11穿透,其中,转子13被限制在定子10和配油盘12之间;泵轴11与双线圈电机5的电机轴同轴连接;在转子 13上设置有多个叶片7,其中,叶片7可相对于转子13活动设置,且叶片7在转子13提供的离心力的作用下,叶片7可活动的接触定子10,当叶片7接触定子10时,叶片7将定子10、配油盘12和转子13之间的腔室分隔为吸油腔和排油腔;储油腔8实际被一部分的泵体6所限制而成,其中,泵体6内部被设置为第一区域和第二区域,第一区域用于容纳前述的
‘
定子10、泵轴11、配油盘12、转子13和叶片7’等部件,第二区域用于形成储油腔8;而滑阀9被设置在排油口15处,其中,滑阀9的作用时调节排出排油口15的润滑油的油量。
[0097]
应当理解的是,滑阀是利用阀芯(柱塞、阀瓣)在密封面上滑动,改变流体进出口通道位置以控制流体流向的分流阀。滑阀常用于蒸汽机、液压和气压等装置,使运动机构获得预定方向和行程的动作或者实现自动连续运转。
[0098]
沿着储油腔8至排油口15的方向,在泵体6内形成排油路径,其中,储存在储油腔8内的润滑油至少可沿着排油路径流经配油盘12、吸油腔、排油腔、滑阀9和排油口15。
[0099]
回油口14被设置在泵体6的表面,其中,回油口14与储油腔8相通;被排放出泵体6的润滑油可在流经助力装置之后,从该回油口14流入储油腔8内。
[0100]
实施例4:
[0101]
在本实施例中,提供一种车辆(图中未出示),包括如前述实施例3的转向油泵。
[0102]
本实施例的转向油泵,与前述实施例3的转向油泵,其结构和功能完全一致,这里不再赘述。
[0103]
此外,本实施例中的车辆,至少包括电动商用车和电动乘用车。
[0104]
以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
