1.本发明涉及垃圾分类分拣领域,具体为一种垃圾分类分拣系统。
背景技术:
2.垃圾分类处理的目的就是为了将废弃物分流处理,利用现有生产制造能力,回收利用回收品,包括物质利用和能量利用,填埋处置暂时无法利用的无用垃圾。
3.现有的垃圾分类分拣系统多采用工业机器人机械臂配合智慧识别摄像头对传送带上的垃圾进行分类分拣,但还需人工对垃圾进行破袋,智慧摄像头对堆积在一起的垃圾无法做到良好的识别,对于体积不同的垃圾堆积在一起分类会降低机械臂分类速度,系统中所使用的机械臂均为一个规格,较大机械臂对较小垃圾夹持效率低,对垃圾分类分拣的效率低,需要人工参与分类分拣系统。
技术实现要素:
4.基于此,本发明的目的是提供一种垃圾分类分拣系统,以解决现有的垃圾分类分拣系统还需人工对垃圾进行破袋,智慧摄像头对堆积在一起的垃圾无法做到良好的识别,较大机械臂对较小垃圾夹持效率低,对垃圾分类分拣的效率低的技术问题。
5.为实现上述目的,本发明提供如下技术方案:一种垃圾分类分拣系统,包括箱体,所述箱体的上部为破袋箱,箱体顶端的外侧设置有多组箱盖气缸,箱盖气缸内设置有连接箱体顶端箱盖的箱盖气杆,所述箱盖的中心滑动设置有钩袋杆,所述钩袋杆底端连接有袋钩,所述钩袋杆向上穿过箱盖连接有震动盘,所述破袋箱内部的一侧设置有破袋盘,所述破袋盘连接有破袋条,所述破袋箱的底端为圆柱形的分料箱,所述分料箱内设置有分料辊,所述分料辊设置有对称的分料槽,所述分料箱底端为落料口,所述落料口底端倾斜设置有分类斜坡,所述分类斜坡设置有多组间隔一侧增大的分类辊,所述分类斜坡的前半段下方设置有小型垃圾传送带,且后半段下方设置有中型垃圾传送带,所述分类斜坡的末端设置有大型垃圾传送带,所述小型垃圾传送带、中型垃圾传送带、大型垃圾传送带和箱体顶端的一侧皆设置有机械臂,所述机械臂上设置有智慧识别摄像头。
6.通过采用上述技术方案,使用工业机械臂配合智慧识别摄像头夹持需要破袋的垃圾,震动盘震动,使垃圾可以均匀的散落出垃圾袋,减少了工人的劳动量,使用软质带钩破袋条,在破袋过程中不会破坏类似玻璃瓶之类垃圾的结构,提高智慧识别摄像头的识别精度,降低机械爪夹持垃圾的难度,提升了对垃圾分类的准确度,设置转动的分拨转盘,分拨盘转动落下的垃圾可以根据体积大小落入不同的分类分拣传送带,便于不同型号的机械手抓取,大大提高了对垃圾分类分拣的效率。
7.本发明进一步设置为,所述箱体顶端设置有垃圾袋入口,所述垃圾袋入口的直径恰好为箱盖的直径,所述箱体顶端的一侧设置有输送带,所述箱盖的顶端设置有多组震动槽,所述震动槽内设置有偏心块,所述偏心块的顶端设置有震动盘支杆,所述震动盘支杆固定连接震动盘的底端,且可在震动槽内上下滑动,所述偏心块内设置有偏心块转轴,所述偏
心块转轴通过震动传动带连接位于箱盖顶端的震动电机。
8.通过采用上述技术方案,通过震动电机的转动,使偏心块转动,震动槽内的震动盘支杆上下运动,使袋钩钩住的垃圾袋也跟随做上下的往复运动。
9.本发明进一步设置为,所述分料辊的中心设置有分料转轴,所述分料转轴延伸出分料箱连接分料箱外的分料电机的输出端,所述破袋盘的中心通过破袋传动带连接箱体外的破袋电机,所述破袋箱下端的两侧内壁上分别设置有感应激光发射端和感应激光接收端。
10.通过采用上述技术方案,感应激光发射端和感应激光接收端可控制震动电机的启停,确保在机械臂挂上垃圾袋的过程中,袋钩的稳定。
11.本发明进一步设置为,所述分类辊内设置有分类辊转轴,所述分类辊转轴通过分类辊支杆支撑分类辊,所述分类辊转轴连接分类斜坡内壁的两侧并设置有轴承。
12.通过采用上述技术方案,通过在分类辊的分类辊转轴内设置轴承,可使分类辊依靠自身重力和垃圾的重力旋转,节约了大量的电能。
13.本发明进一步设置为,所述分类斜坡的左端通过分类斜坡左支杆连接箱体的外壁底端的左侧,且中部的两侧通过分类斜坡右支杆连接箱体外壁底端的右侧。
14.通过采用上述技术方案,确保分类斜坡不会影响到下方的小型垃圾传送带和中型垃圾传送带的同时也可保持倾斜的状态固定在落料口的底端。
15.本发明进一步设置为,所述箱体的左侧中部连接有箱体左支撑腿,且右侧的中部连接有折弯的箱体右支撑腿,所述箱体左支撑腿和箱体右支撑腿的底端皆连接有支撑脚。
16.通过采用上述技术方案,通过支撑脚可使箱体更稳定的立在地面上。
17.本发明进一步设置为,所述小型垃圾传送带、中型垃圾传送带和大型垃圾传送带内皆设置有传送带辊,所述传送带辊的底端连接有传送带支杆。
18.通过采用上述技术方案,通过传送带辊的转动使小型垃圾传送带、中型垃圾传送带和大型垃圾传送带保持运输垃圾的状态。
19.本发明进一步设置为,所述小型垃圾传送带、中型垃圾传送带和大型垃圾传送带的边缘设置有多组分类箱。
20.通过采用上述技术方案,机械臂抓取垃圾,智慧识别摄像头识别垃圾,放入不同的分类箱内。
21.本发明进一步设置为,所述机械臂内转动连接有也可上下滑动的滑柱,所述滑柱的顶端连接有伸缩筒,所述伸缩筒内滑动连接有伸缩杆,所述伸缩杆的末端连接有第一转轴,所述第一转轴的前端连接有第二转轴,所述第二转轴的底端连接有手爪,所述伸缩筒的底端设置有智慧识别摄像头。
22.通过采用上述技术方案,通过各个转轴的配合,可使手爪更为灵活的抓取垃圾。
23.本发明进一步设置为,所述破袋条上均匀设置有多组破袋齿。
24.通过采用上述技术方案,破袋齿的特殊形状可以更好的隔开垃圾袋,同时也不会损伤垃圾袋内的垃圾。
25.综上所述,本发明主要具有以下有益效果:
26.1、本发明通过使用工业机械臂配合智慧识别摄像头夹持需要破袋的垃圾,挂于震动盘,进入箱体内后被破袋,同时震动盘震动,使垃圾可以均匀的散落出垃圾袋,减少了工
人的劳动量;
27.2、本发明通过使用软质带钩破袋条,在破袋过程中不会破坏类似玻璃瓶之类垃圾的结构,提高智慧识别摄像头的识别精度,降低机械爪夹持垃圾的难度,提升了对垃圾分类的准确度;
28.3、本发明通过设置转动的分拨转盘,和倾斜的辊道,使辊道内辊的间距依次扩大,分拨盘转动落下的垃圾可以根据体积大小落入不同的分类分拣传送带,便于不同型号的机械手抓取,便于智慧识别摄像头的识别与记忆,大大提高了对垃圾分类分拣的效率。
附图说明
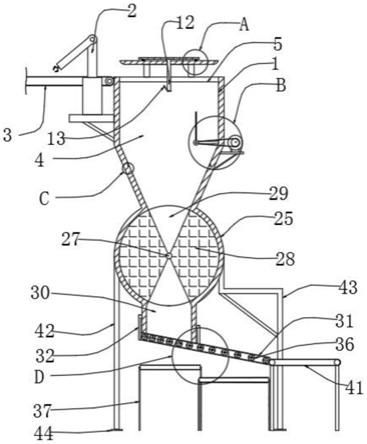
29.图1为本发明的正视内视图;
30.图2为本发明的图1中a的放大图;
31.图3为本发明的图1中b的放大图;
32.图4为本发明的图1中c的放大图;
33.图5为本发明的图1中d的放大图;
34.图6为本发明的上部俯视图;
35.图7为本发明的下部俯视图;
36.图8为本发明的机械抓手的正视图;
37.图9为本发明的破袋条正视图;
38.图10为本发明的图9中e的放大图。
39.图中:1、箱体;2、机械臂;3、输送带;4、破袋箱;5、垃圾袋入口;6、箱盖气缸;7、箱盖气杆;8、箱盖;9、震动盘;10、震动电机;11、震动传动带;12、钩袋杆;13、袋钩;14、震动槽;15、偏心块转轴;16、偏心块;17、震动盘支杆;18、破袋电机;19、破袋传动带;20、破袋盘;21、破袋条;22、破袋齿;23、感应激光发射端;24、感应激光接收端;25、分料箱;26、分料电机;27、分料转轴;28、分料辊;29、分料槽;30、落料口;31、分类斜坡;32、分类斜坡左支杆;33、分类斜坡右支杆;34、分类辊转轴;35、分类辊支杆;36、分类辊;37、传送带支杆;38、传送带辊;39、小型垃圾传送带;40、中型垃圾传送带;41、大型垃圾传送带;42、箱体左支撑腿;43、箱体右支撑腿;44、支撑脚;45、分类箱;46、滑柱;47、伸缩筒;48、伸缩杆;49、第一转轴;50、第二转轴;51、手爪;52、智慧识别摄像头。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
41.下面根据本发明的整体结构,对其实施例进行说明。
42.一种垃圾分类分拣系统,如图1-10所示,包括箱体1,箱体1的上部为破袋箱4,箱体1顶端的外侧设置有多组箱盖气缸6,箱盖气缸6内设置有连接箱体1顶端箱盖8的箱盖气杆7,通过箱盖气杆7在箱盖气缸6内上下运动,达到打开和关闭箱盖8的目的,箱盖8的中心滑动设置有钩袋杆12,钩袋杆12底端连接有袋钩13,袋钩13可钩住所需破袋的垃圾袋,钩袋杆12向上穿过箱盖8连接有震动盘9,破袋箱4内部的一侧设置有破袋盘20,破袋盘20连接有破
袋条21,破袋条21转动可使垃圾袋被破开,配合震动盘9的震动,可使垃圾袋内的垃圾被均匀的散落出,破袋箱4的底端为圆柱形的分料箱25,分料箱25内设置有分料辊28,分料辊28设置有对称的分料槽29,分料箱25底端为落料口30,落料口30底端倾斜设置有分类斜坡31,分类斜坡31设置有多组间隔一侧增大的分类辊36,不同间距的分类辊36可使不同体积的垃圾落入不同的传送带,便于机械臂2的分类,分类斜坡31的前半段下方设置有小型垃圾传送带39,且后半段下方设置有中型垃圾传送带40,分类斜坡31的末端设置有大型垃圾传送带41,小型垃圾传送带39、中型垃圾传送带40、大型垃圾传送带41和箱体1顶端的一侧皆设置有机械臂2,机械臂2上设置有智慧识别摄像头52,通过智慧识别摄像头52识别所需分类的垃圾。
43.请参阅图1,箱体1顶端设置有垃圾袋入口5,垃圾袋入口5的直径恰好为箱盖8的直径,箱体1顶端的一侧设置有输送带3,箱盖8的顶端设置有多组震动槽14,震动槽14内设置有偏心块16,偏心块16的顶端设置有震动盘支杆17,震动盘支杆17固定连接震动盘9的底端,且可在震动槽14内上下滑动,偏心块16内设置有偏心块转轴15,偏心块转轴15通过震动传动带11连接位于箱盖8顶端的震动电机10,通过震动电机10的转动,使偏心块16转动,震动槽14内的震动盘支杆17上下运动,使袋钩13钩住的垃圾袋也跟随做上下的往复运动。
44.请参阅图1和图2,分料辊28的中心设置有分料转轴27,分料转轴27延伸出分料箱25连接分料箱25外的分料电机26的输出端,破袋盘20的中心通过破袋传动带19连接箱体1外的破袋电机18,破袋箱4下端的两侧内壁上分别设置有感应激光发射端23和感应激光接收端24,感应激光发射端23和感应激光接收端24可控制震动电机10的启停,确保在机械臂2挂上垃圾袋的过程中,袋钩13的稳定。
45.请参阅图7,小型垃圾传送带39、中型垃圾传送带40和大型垃圾传送带41内皆设置有传送带辊38,传送带辊38的底端连接有传送带支杆37,通过传送带辊38的转动使小型垃圾传送带39、中型垃圾传送带40和大型垃圾传送带41保持运输垃圾的状态小型垃圾传送带39、中型垃圾传送带40和大型垃圾传送带41的边缘设置有多组分类箱45,机械臂2抓取垃圾,智慧识别摄像头52识别垃圾,放入不同的分类箱45内。
46.请参阅图1和图5,分类辊36内设置有分类辊转轴34,分类辊转轴34通过分类辊支杆35支撑分类辊36,分类辊转轴34连接分类斜坡31内壁的两侧并设置有轴承,通过在分类辊36的分类辊转轴34内设置轴承,可使分类辊36依靠自身重力和垃圾的重力旋转,节约了大量的电能分类斜坡31的左端通过分类斜坡左支杆32连接箱体1的外壁底端的左侧,且中部的两侧通过分类斜坡右支杆33连接箱体1外壁底端的右侧,确保分类斜坡31不会影响到下方的小型垃圾传送带39和中型垃圾传送带40的同时也可保持倾斜的状态固定在落料口30的底端。
47.请参阅图1和图7,箱体1的左侧中部连接有箱体左支撑腿42,且右侧的中部连接有折弯的箱体右支撑腿43,箱体左支撑腿42和箱体右支撑腿43的底端皆连接有支撑脚44,通过支撑脚44可使箱体1更稳定的立在地面上。
48.请参阅图1和图8,机械臂2内转动连接有也可上下滑动的滑柱46,滑柱46的顶端连接有伸缩筒47,伸缩筒47内滑动连接有伸缩杆48,伸缩杆48的末端连接有第一转轴49,第一转轴49的前端连接有第二转轴50,第二转轴50的底端连接有手爪51,伸缩筒47的底端设置有智慧识别摄像头52,通过各个转轴的配合,可使手爪51更为灵活的抓取垃圾。
49.请参阅图10,破袋条21上均匀设置有多组破袋齿22,破袋齿22的特殊形状可以更好的隔开垃圾袋,同时也不会损伤垃圾袋内的垃圾。
50.本发明的工作原理为:袋装的垃圾从输送带3上运动到箱体1顶端的机械臂2上智慧识别摄像头52的识别范围后,经过设备,机械臂2选择抓取垃圾袋的上端,箱盖气杆7带动箱盖8向上运动,至袋钩13露出垃圾袋入口5,机械臂2将垃圾袋挂在袋钩13上,箱盖气杆7缩回箱盖气缸6内,始终保持旋转的破袋条21在垃圾袋下降的过程中对垃圾袋进行破袋,由于破袋条21较细可形变,在破袋过程中不会破坏类似玻璃瓶之类垃圾的结构,提高智慧识别摄像头52的识别精度,降低手爪51夹持垃圾的难度,划破的垃圾袋继续下降直至遮挡住感应激光发射端23和感应激光接收端24之间的激光后,震动电机10开始震动,通过震动传动带11使偏心块转轴15带动偏心块16转动,使震动盘支杆17在震动槽14内上下运动,震动盘9震动使钩袋杆12底端的垃圾袋也跟随震动,使垃圾袋内的垃圾能够完全脱离垃圾袋,机械臂2在下一次挂袋之前会先摘下袋钩13上的垃圾袋空袋,再挂上新的垃圾袋,散落的垃圾在破袋箱4内下落,分料电机26转动使分料箱25内的分料辊28以分料转轴27为轴转动,垃圾在分料槽29内堆积后经过半圈的旋转落在分类斜坡31的顶端,使垃圾下落的更加均匀,落在分类斜坡31上的垃圾根据体积的大小分在滑落的过程中落在小型垃圾传送带39、中型垃圾传送带40或大型垃圾传送带41上,便于小型垃圾传送带39、中型垃圾传送带40或大型垃圾传送带41周围的机械臂2和机械臂2底端的智慧识别摄像头52识别和放入指定的分类箱45内,机械臂2内的滑柱46可在机械臂2内上下移动控制手爪51的高度,同时也可在机械臂2内转动,控制手爪51的角度,伸缩筒47内的伸缩杆48可在伸缩筒47内伸缩,控制手爪51的前后移动,第一转轴49和第二转轴50便于手爪51抓取垃圾,智慧识别摄像头52手爪51的抓取提供信息。
51.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。