1.本发明涉及微电机装配系统,具体地说,是涉及微电机磁瓦送料系统。
背景技术:
2.磁瓦是微电机的重要零部件,在微电机装配过程中,磁瓦的送料速度直接影响电机装配效率。由于磁瓦在瓦楞纸中为站立叠放,因此需要人工单个取出磁瓦并传递至上料工序处,这一过程不仅效率低下,且耗费较多人力,也存在磁瓦碎裂较多的问题。因此,有必要研发一种自动化的磁瓦送料系统来解决上述技术问题。
技术实现要素:
3.为了解决上述技术问题,本发明的目的是提供一种微电机磁瓦送料系统,该系统可实现磁瓦快速上料,同时保证磁瓦不碎裂。
4.基于上述目的,本发明提供一种微电机磁瓦送料系统,该系统包括控制装置及分别与其连接的抓取机构、转运机构、单片分离机构,其中:所述抓取机构包括可移动式龙门架及设置于其上的机械手,所述可移动式龙门架可带动机械手在磁瓦料盘和转运机构之间移动,所述机械手用于自料盘抓取多个磁瓦并将该多个磁瓦一同放置在转运机构上;所述转运机构,包括设置于抓取机构下方的送料轨道,该送料轨道用于将磁瓦转运至单片分离机构,所述送料轨道上配置磁瓦推动单元,所述磁瓦推动单元用于推动磁瓦朝向靠近单片分离机构的方向前进并防止磁瓦倾倒;所述单片分离机构,用于从多个磁瓦中分离出单片磁瓦供上料装配使用。
5.作为优选,所述可移动式龙门架包括第一平移单元和第一升降单元,所述第一平移单元包括设置于磁瓦料盘上方的两个相互平行的平移轨道,所述第一升降单元横跨于所述平移轨道上,机械手连接于第一升降单元下方;所述机械手包括抓取部分及支撑部分,所述支撑部分包括相互平行的两个竖向设置第一支撑板及横向设置于第一支撑板上方的第二支撑板,所述第二支撑板和两第一支撑板之间限定出一条形空间,所述抓取部分包括磁铁、连接件及伸缩驱动装置,所述伸缩驱动装置固定于第二支撑板上方,所述磁铁设置于条形空间内,所述连接件贯穿所述第二支撑板,连接件的两端分别与伸缩驱动装置的驱动端及磁铁连接,从而磁铁可在伸缩驱动装置的驱动下在条形空间内上下移动;当抓取磁瓦时,伸缩驱动装置驱动磁铁向下移动至磁铁底部可与第一支撑板底部齐平,此时磁铁对磁瓦的吸力最大,磁瓦的顶部被该磁吸力固定在磁铁及两第一支撑板的底部,这样通过该磁吸力实现对磁瓦的抓取;当放置磁瓦时,伸缩驱动装置驱动磁铁向上移动远离磁瓦,同时第一支撑板对磁瓦进行限位,避免其跟随磁铁向上移动,随着磁瓦和磁铁之间距离的增大,二者之间磁吸力减小,磁瓦依靠重力停留在原地。
6.作为优选,所述第一平移单元还包括第一传送带及驱动其移动的第一驱动电机,
所述第一传送带与所述平移轨道相邻且平行设置,第一传送带上配置有第一滑块,该第一滑块和所述第一升降单元固定连接,当所述第一驱动电机驱动第一传送带转动时,第一滑块在第一传送带的驱动下带动第一升降单元在平移轨道上移动。
7.作为优选,所述第一升降单元包括支撑架,该支撑架的两端分别限位于平移轨道上,所述支撑架的中部配置有第一升降气缸,该第一升降气缸的底部与机械手连接,用于驱动所述机械手上下移动。
8.作为优选,所述磁瓦推动单元包括推块、第二传送带及驱动第二传送带转动的第二驱动电机,所述推块设置于送料轨道上,且可沿送料轨道的长度方向移动,所述推块的底部与第二传送带连接,且推块可相对第二传送带单向移动,这样,当第二传送带带动推块朝向靠近上料方向转动时,所述第二传送带同时向推块施加推动磁瓦向前移动的力,推块可在推动磁瓦前进时,抵在磁瓦后方,避免磁瓦发生倾倒;当第二传送带反方向转动时,第二传送带带动推块向远离上料方向移动。
9.作为优选,所述送料轨道上靠近上料方向一端设置有用于检测推块位置的第一光电检测装置,当推块移动至该第一光电检测装置处时,所述抓取机构启动抓取准备动作,同时,磁瓦推动单元驱动第二驱动电机反转,使第二传送带带动推块回退至起始工位。
10.作为优选,所述第二传送带上限定有多个向远离送料方向倾斜的阻挡部件,当第二传送带向送料方向转动时,所述阻挡部件对推块施加向前的力,从而推块可抵在磁瓦上推动磁瓦向上料方向移动,同时,由于所述阻挡部件推动推块的力有限,磁瓦可与阻挡部件之间产生相对位移,因此推块对磁瓦的推力并不会使磁瓦碎裂;当第二传送带向相反方向移动时,所述阻挡部件和推块之间形成直接对抗,推块跟随第二传送带移动,二者之间不会产生相对位移。
11.作为优选,所述单片分离机构包括设置于送料轨道靠近上料方向一端的上方的推料单元及设置于推料单元和送料轨道下方的接料单元,当检测到送料轨道上的磁瓦就位后,所述接料单元移动至最前端磁瓦的正下方,此时推料单元向下移动推动磁瓦,使其向下滑动至接料单元内。
12.作为优选,所述单片分离机构还包括设置于送料轨道靠近上料方向一端的第二光电检测装置,该第二光电检测装置用于检测所述推料单元的正下方是否有磁瓦就位,当检测到磁瓦就位时,所述推料单元及接料单元启动,执行单片分离动作。
13.作为优选,所述接料单元包括接料部,该接料部限定有弧形的侧面及底部面,所述弧形侧面用于与磁瓦的后部突出的弧形面相贴合,所述底部面用于承载磁瓦;所述接料部面向磁瓦的两侧分别设置有抱箍,所述抱箍用于对磁瓦的前部两侧进行限位。
14.与现有技术相比,本发明的有益效果为:本发明的抓取机构采用磁吸方式取放磁瓦,不仅可一次性抓取较多数量的磁瓦,同时可实现磁瓦的快速平稳抓取,保证抓取及传递过程中磁瓦不碎裂。
15.本发明的转运机构通过磁瓦推动单元推动磁瓦前进,实现现快速、稳定的转运磁瓦,同时,单片分离单元可自动实现单片磁瓦的分离,方便后续上料工序;此外,其送料轨道具有一定的存储功能,可一次性容纳上百个磁瓦,可降低抓取机构对送料轨道的上料频次,有效提高电机装配效率。
16.本发明的单片分离机构可实现磁瓦的高速分离,能够满足每小时360个以上的产
能,显著提高电机装配效率。
17.基于上述,本发明可在保证磁瓦不碎裂的基础上,实现磁瓦快速上料。
附图说明
18.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的限定。
19.图1是本发明实施例中的磁瓦上料系统的整体结构示意图一;图2是本发明实施例中的磁瓦上料系统的整体结构示意图二;图3是本发明实施例中的磁瓦上料系统的整体结构示意图三(储料台未示出);图4是本发明实施例中的磁瓦上料系统的整体结构示意图四(储料台未示出);图5是本发明实施例中磁瓦上料系统中抓取机构的结构示意图;图6是本发明实施例中磁瓦上料系统中机械手的结构示意图一;图7是本发明实施例中磁瓦上料系统中机械手(去掉磁铁)的结构示意图二;图8是本发明实施例中磁瓦上料系统中转运机构的结构示意图一;图9是本发明实施例中磁瓦上料系统中转运机构的结构示意图二;图10是本发明实施例中磁瓦上料系统中转运机构的结构示意图三;图11是图10中a处的结构放大图;图12是本发明实施例中磁瓦上料系统中单片分离机构的结构示意图一;图13是本发明实施例中磁瓦上料系统中单片分离机构的结构示意图二;图14是本发明实施例中磁瓦上料系统中接料单元的结构示意图。
20.其中,a、磁瓦;101、平移轨道;102、支撑架;103、第一升降气缸;104、机械手;105、第一传送带;1041、第一支撑板;1042、第二支撑板;1043、条形空间;1044、磁铁;1045、连接件;1046、伸缩驱动装置;1047、第一弧形限位结构;1048、第二弧形限位结构;201、送料轨道;202、推块;203、第二传送带;204、第二驱动电机;205、第一光电检测装置;206、送料平台;2011、第一限位板;2012、第二限位板;2021、弧形面;20121、第三弧形限位结构;2061、条形孔;301、推料单元;302、接料单元;303、第二光电检测装置;304、第三支撑板;305、支撑台;306、第二平移单元;307、第三光电检测装置;3011、第二升降单元;3012、推杆;3021、接料部;3022、抱箍。
具体实施方式
21.下面结合附图与实施例对本发明作进一步说明。
22.应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常
理解的相同含义。
23.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
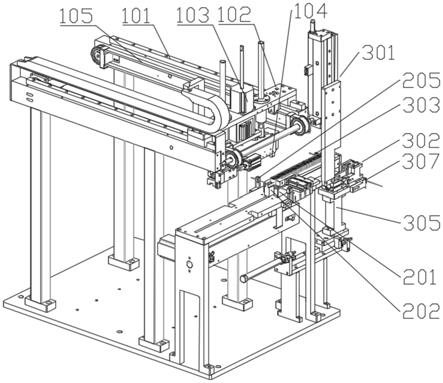
24.本实施例提供一种微电机磁瓦送料系统,如图1-4所示,该系统包括控制装置及分别与其连接的抓取机构、转运机构、单片分离机构,其中:如图5所示,所述抓取机构包括可移动式龙门架及设置于其上的机械手104,所述可移动式龙门架可带动机械手104在磁瓦料盘和转运机构之间移动,所述机械手104用于自料盘抓取多个磁瓦a并将该多个磁瓦a一同放置在转运机构上;如图8和图9所示,所述转运机构,包括设置于抓取机构下方的送料轨道201,该送料轨道201用于将磁瓦a转运至单片分离机构,所述送料轨道201上配置磁瓦推动单元,所述磁瓦推动单元用于推动磁瓦a朝向靠近单片分离机构的方向(即上料方向)前进并防止磁瓦a倾倒;所述单片分离机构,用于从多个磁瓦中分离出单片磁瓦a供上料装配使用。
25.作为一种较优的实施方式,如图5所示,所述可移动式龙门架包括第一平移单元和第一升降单元,所述第一平移单元包括设置于磁瓦料盘上方的两个相互平行的平移轨道101,所述第一升降单元横跨于所述平移轨道101上,机械手104连接于第一升降单元下方;如图6和图7所示,所述机械手104包括抓取部分及支撑部分,所述支撑部分包括相互平行的两个竖向设置第一支撑板1041及横向设置于第一支撑板1041上方的第二支撑板1042,所述第二支撑板1042和两第一支撑板1041之间限定出一条形空间1043;所述抓取部分包括磁铁1044、连接件1045及伸缩驱动装置1046,其中,伸缩驱动装置1046固定于第二支撑板1042上方,磁铁1044设置于所述条形空间1043内,连接件1045贯穿所述第二支撑板1042,连接件1045的一端与伸缩驱动装置1046的驱动端连接,连接件1045的另一端与磁铁1044连接,从而磁铁1044可在伸缩驱动装置1046的驱动下在条形空间1043内上下移动;当抓取磁瓦a时,伸缩驱动装置1046驱动磁铁1044向下移动至磁铁1044底部可与第一支撑板1041底部齐平,此时磁铁1044对磁瓦a的吸力最大,磁瓦a的顶部被该磁吸力固定在磁铁1044及两第一支撑板1041的底部,这样通过该磁吸力实现对磁瓦a的抓取;当放置磁瓦a时,伸缩驱动装置1046驱动磁铁1044向上移动远离磁瓦a,同时第一支撑板1041对磁瓦a进行限位,避免其跟随磁铁1044向上移动,随着磁瓦和磁铁1044之间距离的增大,二者之间磁吸力减小,磁瓦a依靠重力停留在原地。
26.作为一种较优的实施方式,如图5所示,所述第一平移单元还包括第一传送带105及驱动其移动的第一驱动电机,所述第一传送带105与所述平移轨道101相邻且平行设置,第一传送带105上配置有第一滑块,该第一滑块和所述第一升降单元固定连接,当所述第一驱动电机驱动第一传送带105转动时,第一滑块在第一传送带105的驱动下带动第一升降单元在平移轨道101上移动。
27.作为一种较优的实施方式,参见图5,所述第一升降单元包括支撑架102,该支撑架102的两端分别限位于平移轨道101上,所述支撑架102的中部配置有第一升降气缸103,该第一升降气缸103的底部与机械手104连接,用于驱动所述机械手104上下移动。
28.作为一种较优的实施方式,如图7所示,所述抓取部分的两端分别配置有限位结构,其中,抓取部分靠近上料方向的一端限定有向条形空间1043内侧凹陷的与磁瓦凹陷面相契合的第一弧形限位结构1047,夹持部分远离上料方向的一端限定有向条形空间1043外侧凹陷的与磁瓦突出面相契合的第二弧形限位结构1048,这样,当抓取部分抓取磁瓦时,所述第一弧形限位结构1047与第二弧形限位结构1048对磁瓦形成水平方向的限位,避免其发生水平向移动。
29.作为一种较优的实施方式,如图6所示,所述伸缩驱动装置1046包括设置于支撑部分顶部的第二升降气缸,所述连接件1045包括连接杆。
30.作为一种较优的实施方式,所述条形空间1043的宽度为磁瓦宽度的1/2-3/4。
31.作为一种较优的实施方式,所述磁铁1044优选为汝铁硼磁铁。
32.作为一种较优的实施方式,如图8-11所示,所述磁瓦推动单元包括推块202、第二传送带203及驱动第二传送带203转动的第二驱动电机204,所述推块202设置于送料轨道201上,可在第二传送带203的带动下沿送料轨道201的长度方向移动;特别地,所述推块202的底部与第二传送带203连接,且推块202可相对第二传送带203单向移动,这样,当第二传送带203带动推块202向上料方向移动时,所述第二传送带203同时向推块202施加推动磁瓦向前移动的力,推块202可在推动磁瓦前进时,抵在磁瓦后方,避免磁瓦发生倾倒;当第二传送带203反方向转动时,第二传送带203带动推块202向远离上料方向移动。
33.作为一种较优的实施方式,所述送料轨道201上靠近上料方向一端设置有用于检测推块202位置的第一光电检测装置205,当推块202移动至该第一光电检测装置205处时,所述抓取机构启动抓取准备动作,同时,磁瓦推动单元驱动第二驱动电机204反转,使第二传送带203带动推块202回退至起始工位,当推块202回退至起始位置时,抓取机构启动抓取动作,并将磁瓦放置于送料轨道201上。
34.作为一种较优的实施方式,如图11所示,所述推块202靠近磁瓦一侧限定有弧形面2021,该弧形面2021和磁瓦的突出面相契合,这样,当推块202推动磁瓦前进时,推块202的前端面可环抱磁瓦的后侧面,增加磁瓦前进过程中的稳定性。
35.作为一种较优的实施方式,所述送料轨道201包括两个相对且平行设置的第一限位板2011,两第一限位板2011之间限定出供磁瓦通过的限位通道,该限位通道的宽度等于或略大于磁瓦宽度。
36.作为一种较优的实施方式,如图8-10所示,所述送料轨道201配置于送料平台206上,所述该送料平台206上限定有与所述限位通道相贯通的条形孔2061,所述第二传送带203及第二驱动电机204配置于该送料平台206下方,所述推块202的底部贯穿所述条形孔2061与第二传送带203连接。
37.作为一种较优的实施方式,所述第二传送带203上限定有多个向远离送料方向倾斜的阻挡部件,当第二传送带203向送料方向转动时,所述阻挡部件对推块202施加向上料方向移动的力,从而可使推块202抵在磁瓦上,推动磁瓦向上料方向移动,同时,由于所述阻挡部件推动推块202的力有限,磁瓦可与阻挡部件之间产生相对位移,因此推块202对磁瓦的推力并不会使磁瓦碎裂;当第二传送带203向相反方向移动时,所述阻挡部件和推块202之间形成直接对抗,推块202跟随第二传送带203移动,二者之间不会产生相对位移。
38.作为一种较优的实施方式,所述阻挡部件为倒刺状结构或倒齿状结构。
39.作为一种较优的实施方式,所述送料轨道201靠近上料方向的一端配置有第二限位板2012,该第二限位板2012靠近送料轨道201一侧限定有第三弧形限位结构20121,该第三弧形限位结构20121的表面与磁瓦的凹陷面相适配;同时,送料轨道201靠近上料方向的一端下部限定有一豁口,该豁口的形状和磁瓦的横截面形状相适配。
40.作为一种较优的实施方式,如图1-4及图12、图13所示,所述单片分离机构包括设置于送料轨道201靠近上料方向一端的上方的推料单元301及设置于推料单元301和送料轨道201下方的接料单元302,当检测到送料轨道201上的磁瓦就位后,所述接料单元302移动至最前端磁瓦的正下方,此时推料单元301向下移动推动磁瓦,使其向下滑动至接料单元302内。
41.作为一种较优的实施方式,所述单片分离机构还包括设置于送料轨道201靠近上料方向一端的第二光电检测装置303,该第二光电检测装置303用于检测所述推料单元301的正下方是否有磁瓦就位,当检测到磁瓦就位时,所述推料单元301及接料单元302启动,执行单片分离动作。
42.作为一种较优的实施方式,如图12及图13所示,所述推料单元301包括第二升降单元3011及连接于其下方的推杆3012,当第二光电检测装置303检测到磁瓦就位时,所述第二升降单元3011驱动推杆3012下降,通过推杆3012推动磁瓦向下滑动。
43.作为一种较优的实施方式,所述第二升降单元3011通过第三支撑板304固定于送料轨道201前端的正上方。
44.作为一种较优的实施方式,如图14所示,所述接料单元302包括接料部3021,该接料部3021限定有弧形的侧面及底部面,所述弧形侧面用于与磁瓦的后部突出的弧形面2021相贴合,所述底部面用于承载磁瓦;所述接料部3021面向磁瓦的两侧分别设置有抱箍3022,所述抱箍3022用于对磁瓦的前部两侧进行限位。
45.作为一种较优的实施方式,所述接料单元302还包括支撑台305和第二平移单元306,所述接料部3021和第二平移单元306均设置于支撑台305上,所述第二平移单元306通过抱箍3022与所述接料部3021连接,用于驱动所述接料部3021在接料工位与上料工位之间移动。
46.作为一种较优的实施方式,如图14所示,所述抱箍3022靠近上料方向的一端环抱住接料部3021的两侧,从而对接料部3021进行限位,抱箍3022远离上料方向的一端与第二平移单元306固定连接。
47.作为一种较优的实施方式,如图14所示,所述接料部3021上还配置有第三光电检测装置307,用于检测接料部3021中是否承载有磁瓦,当接料部3021中承载有磁瓦时,则接料单有启动执行上料动作。
48.综上,本发明的抓取机构采用磁吸方式取放磁瓦,不仅可一次性抓取较多数量的磁瓦,同时可实现磁瓦的快速平稳抓取,保证抓取及传递过程中磁瓦不碎裂;本发明的转运机构通过磁瓦推动单元推动磁瓦前进,实现现快速、稳定的转运磁瓦,同时,单片分离单元可自动实现单片磁瓦的分离,方便后续上料工序;此外,其送料轨道具有一定的存储功能,可一次性容纳上百个磁瓦,可降低抓取机构对送料轨道的上料频次,有效提高电机装配效率;本发明的单片分离机构可实现磁瓦的高速分离,能够满足每小时360个以上的产能,显著提高电机装配效率。基于上述,本发明可在保证磁瓦不碎裂的基础上,实现磁瓦快速上
料。
49.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。