1.本实用新型涉及机械自动化技术领域,具体地说,是涉及一种取料机构,广泛应用于3c电子行业产品精密组装设备中。
背景技术:
2.随着社会不断发展,科技不断进步,3c电子设备产品不断地融入我们的日常生活,我们对3c电子设备产品的需求量也越来越大。3c电子行业产品的生产过程中,产品组装自动化越来越普遍化,对小产品取料、组装要求以及设备成本控制要求也越来越高。现有技术的利用凸轮联动方式的取料机构结构较为复杂,维修保养不易,且成本高。
技术实现要素:
3.本实用新型的目的是提供一种具有新型取料方式的取料结构,利用双凸轮连杆联动多点位实现两个方向运动取料,结构简单,成本低。
4.为了实现上述目的,本实用新型的取料机构包括机架和分别连接在所述机架上的驱动单元、取料单元和导向单元,所述导向单元包括第一方向导向单元和第二方向导向单元。第一方向导向单元包括第一方向导向凸轮和由所述第一方向导向凸轮驱动连接的第一方向导向连杆,第二方向导向单元包括第二方向导向凸轮和由所述第二方向导向凸轮驱动连接的第二方向导向连杆。其中,所述取料单元分别连接所述第一方向导向连杆以及所述第二方向导向连杆,所述第一方向导向凸轮和所述第二方向导向凸轮同时由所述驱动单元驱动。
5.上述的取料机构的一实施方式中,所述驱动单元包括驱动电机和由所述驱动电机驱动的驱动轴,所述第一方向导向凸轮和第二方向导向凸轮依次套接在所述驱动轴上。
6.上述的取料机构的一实施方式中,所述驱动电机还包括输出轴以及输出轮组,所述输出轴与所述输出轮组转动连接,所述驱动轴设置于所述输出轮组,所述输出轮组带动所述驱动轴转动。
7.上述的取料机构的一实施方式中,所述驱动电机竖向连接在所述机架的顶部,所述驱动电机的输出轴的轴线与所述驱动轴的轴线垂直。
8.上述的取料机构的一实施方式中,所述第一方向导向连杆包括第一随动杆和第一方向位移杆,第一随动杆转动连接在所述机架上,所述第一随动杆包括第一随动端部和第一连接端部,所述第一随动端部由所述第一方向导向凸轮驱动,所述第一方向位移杆两端分别与所述第一连接端部以及取料单元连接。
9.上述的取料机构的一实施方式中,所述第二方向导向连杆包括第二随动杆和第二方向位移杆,第二随动杆转动连接在所述机架上,所述第二随动杆包括第二随动端部和第二连接端部,所述第二随动端部由所述第二方向导向凸轮驱动,所述第二方向位移杆两端分别与所述第二连接端部以及取料单元连接。
10.上述的取料机构的一实施方式中,所述第一连接端部滑动连接在所述第一方向位
移杆上,所述第二连接端部与所述第二方向位移杆转动连接。
11.上述的取料机构的一实施方式中,所述第一方向导向单元还包括套接在所述第一方向位移杆上的第一方向导向衬套,所述第二方向位移杆连接在所述第一方向导向衬套上。
12.上述的取料机构的一实施方式中,所述第二方向导向单元还包括第二方向导向衬套,所述第二方向导向衬套套接在所述第二方向位移杆上。
13.上述的取料机构的一实施方式中,所述第一方向位移杆和所述第二方向位移杆分别包括两个平行杆。
14.本实用新型的有益功效在于,本实用新型的第一方向导向凸轮和第二方向导向凸轮同时由驱动单元驱动,即两个方向运动由同一驱动单元完成,简化了机构,节省了构件使用,并且能够减少机构占用空间。
15.以下结合附图和具体实施例对本实用新型进行详细描述,但不作为对本实用新型的限定。
附图说明
16.图1为本实用新型的取料机构的一实施例的立体结构图;
17.图2为本实用新型的取料机构的一实施例的工作过程图(一);
18.图3为本实用新型的取料机构的一实施例的工作过程图(二);
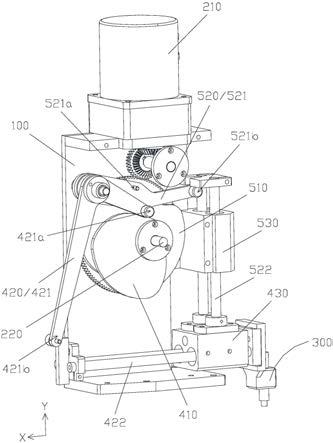
19.图4为本实用新型的取料机构的驱动单元的一实施例的局部视图。
20.其中,附图标记
21.100:机架
22.200:驱动单元
23.210:驱动电机
24.212:输出轮组
25.2121:伞齿轮
26.2122:驱动齿轮
27.220:驱动轴
28.300:取料单元
29.400:第一方向导向单元
30.410:第一方向导向凸轮
31.420:第一方向导向连杆
32.421:第一随动杆
33.421a:第一随动端部
34.421b:第一连接端部
35.422:第一方向位移杆
36.430:第一方向导向衬套
37.500:第二方向导向单元
38.510:第二方向导向凸轮
39.520:第二方向导向连杆
40.521:第二随动杆
41.521a:第二随动端部
42.521b:第二连接端部
43.522:第二方向位移杆
44.530:第二方向导向衬套
具体实施方式
45.下面结合附图和具体实施例对本实用新型技术方案进行详细的描述,以更进一步了解本实用新型的目的、方案及功效,但并非作为本实用新型所附权利要求保护范围的限制。
46.如图1至图3所示,图1为本实用新型的取料机构的一实施例的立体结构图,图2和图3分别为本实用新型的取料机构的一实施例的工作过程图(取出视图方向的侧板)。本实用新型的取料机构包括机架100、驱动单元200、取料单元300和导向单元,驱动单元200、取料单元300和导向单元分别连接在机架100上。其中,驱动单元200驱动导向单元运动,取料单元300连接在导向单元上以通过导向单元的带动运动而位移取料。
47.机架100例如包括相对设置的第一侧板110和第二侧板120,第一侧板110和第二侧板120之间形成一容置空间,驱动单元200和导向单元可通过第一侧板110以及第二侧板120支撑,并驱动单元200和导向单元的部分或全部可置于容置空间内。
48.其中,导向单元包括第一方向导向单元400和第二方向导向单元500,第一方向导向单元400和第二方向导向单元500分别连接驱动单元200,并第一方向导向单元400和第二方向导向单元500同时由驱动单元200驱动运动。详细来说,第一方向导向单元400包括第一方向导向凸轮410和由第一方向导向凸轮410驱动连接的第一方向导向连杆420,第二方向导向单元500包括第二方向导向凸轮510和由第二方向导向凸轮510驱动连接的第二方向导向连杆520。取料单元300分别连接第一方向导向连杆420以及第二方向导向连杆520,第一方向导向凸轮410和第二方向导向凸轮510同时由驱动单元200驱动。
49.其中,驱动单元200包括驱动电机210和驱动轴220,驱动轴220由驱动电机210驱动,第一方向导向单元400的第一方向导向凸轮410和第二方向导向单元500的第二方向导向凸轮510依次套接在驱动轴220上。结合图2和图3,驱动轴220由驱动电机210驱动转动,依次套接在驱动轴220上的第一方向导向凸轮410和第二方向导向凸轮510随同驱动轴220同时转动,即本实用新型通过单一驱动电机210同时驱动第一方向导向凸轮410和第二方向导向凸轮510两个方向的凸轮运动,第一方向导向凸轮410和第二方向导向凸轮510分别带动第一方向导向连杆420和第二方向导向连杆520运动,进而实现使连接在第一方向导向连杆420以及第二方向导向连杆520上的取料单元300于第一方向以及第二方向位移并取料。
50.本实用新型的取料机构的两个方向运动只需要使用一个电机(或气缸),可以简化机构,节省构件使用,并且节约配置空间。
51.其中,取料单元300可以为吸附盘机构,也可以为夹爪机构,本实用新型没有限定,本领域内公知的一般取料机构形式皆可用于本实用新型中。
52.驱动单元200的驱动电机210还包括输出轴(图未示)以及输出轮组212,输出轴与输出轮组212转动连接,驱动轴220设置于输出轮组212,输出轮组212带动驱动轴220转动。
53.结合图4所示,图4为本实用新型的取料机构的驱动单元的一实施例的局部视图。其中,输出轮组212包括伞齿轮2121以及驱动齿轮2122。驱动电机210竖向连接在机架100的顶部,驱动电机210的输出轴的轴线与驱动轴220的轴线垂直。驱动电机210置于机架100的顶部,能够减少设备所占用的空间,整体结构更紧凑,利于布置其它设备。其中,驱动电机210的输出轴通过相啮合的伞齿轮2121与驱动齿轮2122的传动实现驱动驱动轴220转动。
54.需要说明的是,在其它实施例中,驱动电机210也可以水平设置,驱动电机210的输出轴可与驱动轴220平行,此时可不设置伞齿轮,通过普通的齿轮传动即可驱动驱动轴220转动。
55.参阅图2和图3,第一方向导向连杆420包括第一随动杆421和第一方向位移杆422,第一随动杆421转动连接在机架100上,例如,第一随动杆421通过轴承转动连接在第一侧板110和/或第二侧板120上。其中,第一随动杆421包括第一随动端部421a和第一连接端部421b,第一随动端部421a由第一方向导向凸轮410驱动,第一方向位移杆422的两端分别与第一连接端部421b以及取料单元300连接。
56.本实施例中,第一随动杆421整体呈v字形,v字形的两条边相交的端部转动连接机架100,v字形的两个分离的端部分别为第一随动端部421a和第一连接端部421b,第一随动端部421a驱动连接第一方向导向凸轮410,第一连接端部421b连接第一方向位移杆422。第一方向导向凸轮410转动的过程中,第一随动杆421由于第一随动端部421a随第一方向导向凸轮410的曲线轮廓运动而转动,进而使连接在第一连接端部421b上的第一方向位移杆422沿第一方向x位移,第一方向位移杆422带动取料单元300沿第一方向x位移。
57.第二方向导向连杆520包括第二随动杆521和第二方向位移杆522,第二随动杆521转动连接在机架100上,例如,第二随动杆521通过轴承转动连接在第一侧板110和/或第二侧板120上,或者第一随动杆421以及第二随动杆521可以通过同一轴承转动连接在第一侧板110和/或第二侧板120上,本实用新型不以为限。第二随动杆521包括第二随动端部521a和第二连接端部521b,第二随动端部521a由第二方向导向凸轮510驱动,第二方向位移杆522的两端分别与第二连接端部521b以及取料单元300连接。
58.本实施例中,第二随动杆521整体呈条状,第二随动杆521的一端转动连接在机架100上,第二连接端部521b位于该条状的第二随动杆521的活动端部,第二随动端部521a位于该条状的第二随动杆521的中间,即位于连接在机架100上的转动端部与第二连接端部521b之间。第二方向导向凸轮510转动的过程中,第二随动杆521由于第二随动端部521a随第二方向导向凸轮510的曲线轮廓运动而转动,进而连接在第二连接端部521b上的第二方向位移杆522沿第二方向y位移,第二方向位移杆522带动取料单元300沿第二方向y位移。
59.本实施例中,第一方向x例如为水平方向,第二方向y例如为与第一方向垂直的竖直方向,但本实用新型不以为限。
60.本实用新型通过驱动单元200对第一方向导向单元400和第二方向导向单元500分别沿水平方向和垂直方向进行导向,进而带动取料单元300于第一方向和第二方向所限定的平面内位移,达到精细控制取料的目的。
61.第一随动杆421的第一连接端部421b滑动连接在第一方向位移杆422上,第二随动杆521的第二连接端部521b与第二方向位移杆522转动连接。取料单元300连接在第一方向位移杆422以及第二方向位移杆522上,取料单元300通过第一方向位移杆422以及第二方向
位移杆522带动而在第一方向以及第二方向上移动。
62.第一方向导向单元400还包括第一方向导向衬套430,第一方向导向衬套430套接在第一方向位移杆422上,第二方向位移杆522连接在第一方向导向衬套430上。
63.第二方向导向单元500还包括第二方向导向衬套530,第二方向导向衬套530套接在第二方向位移杆522上。
64.具体来说,第一方向位移杆422和第二方向位移杆522分别通过第一方向导向衬套430和第二方向导向衬套530导向,其中,第二方向位移杆522通过第一方向导向衬套430沿第一方向x滑动连接在第一方向位移杆422上,取料单元300连接在第一方向位移杆422的端部。
65.进一步地,第一方向位移杆422和第二方向位移杆522分别包括两个平行杆,运动平稳精准。
66.当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。