1.本发明涉及卡爪更换装置以及机床。
背景技术:
2.具备保管多个卡爪(爪)的库的机床已被公众所知。
3.作为相关技术,在专利文献1中公开了卡盘爪自动更换装置的爪储存库。专利文献1所记载的爪储存库固定于滑动基座,爪储存库能够与滑动基座一起沿着前后方向移动。滑动基座经由固定基座固定于主轴台。当爪储存库位于前进位置时,将保管于爪储存库的爪与安装于卡盘主体的卡爪更换。
4.现有技术文献
5.专利文献1:日本专利公开公报特公平5-75522号
技术实现要素:
6.本发明的目的在于提供一种能够容易地执行将卡爪保管于储料器的作业的卡爪更换装置以及机床。
7.几个实施方式的卡爪更换装置具备:储料器,保管用于安装于能够绕旋转轴旋转的卡盘主体的卡爪;储料器移动机构,使所述储料器在第一位置与第二位置之间移动;以及卡爪移送装置,能够从接收所述卡爪的卡爪接收装置向位于所述第一位置的所述储料器移送所述卡爪,并且能够从位于所述第二位置的所述储料器向所述卡盘主体移送所述卡爪。
8.几个实施方式的机床具备:卡爪更换装置;卡盘主体,经由卡爪保持工件;支承部件,将所述卡盘主体支承为能够旋转;加工装置,安装有刀具;以及控制装置,对所述卡爪更换装置进行控制,所述卡爪更换装置具备:卡爪接收装置,能够接收所述卡爪;储料器,能够保管多个所述卡爪;储料器移动机构,使所述储料器在第一位置与第二位置之间移动;以及卡爪移送装置,能够从所述卡爪接收装置向位于所述第一位置的所述储料器移送所述卡爪,并且能够从位于所述第二位置的所述储料器向所述卡盘主体移送所述卡爪。
9.根据本发明,能够提供一种能够容易地执行将卡爪保管于储料器的作业的卡爪更换装置以及机床。
附图说明
10.图1是示意性地表示第一实施方式的卡爪更换装置以及机床的配置的一例的俯视图。
11.图2是示意性地表示第二实施方式的卡爪更换装置的概要立体图。
12.图3是放大表示卡爪更换装置的一部分的概要放大主视图。
13.图4是示意性地表示第二实施方式的卡爪更换装置的概要俯视图。
14.图5是示意性地表示第二实施方式的卡爪更换装置的概要俯视图。
15.图6是示意性地表示第二实施方式的卡爪更换装置的概要俯视图。
16.图7是示意性地表示第二实施方式的卡爪更换装置的概要主视图。
17.图8是放大表示卡爪更换装置的一部分的概要放大主视图。
18.图9是示意性地表示卡爪接收装置的一例的概要立体图。
19.图10是示意性地表示第二实施方式的卡爪更换装置以及机床的配置的一例的概要主视图。
20.图11是表示卡爪的保管方法的一例的流程图。
21.图12是表示卡爪的更换方法的一例的流程图。
具体实施方式
22.以下,参照附图对几个实施方式的卡爪更换装置1以及机床100进行说明。另外,在以下的实施方式的说明中,对具有相同功能的部位、部件标注相同的附图标记,并省略标注有相同的附图标记的部位、部件的反复说明。
23.(方向和术语的定义)
24.在本说明书中,“第一位置p1”是指储料器20能够从卡爪接收装置10接收卡爪c的位置或者能够从储料器20向卡爪接收装置10取出卡爪c的位置。此外,“第二位置p2”是指储料器20能够从卡盘主体62接收卡爪c的位置或者储料器20能够向卡盘主体62供给卡爪c的位置。
25.在本说明书中,将从卡爪接收装置10朝向位于第一位置p1的储料器20(更具体而言,储料器20的卡爪接收部21a)的方向定义为“第一方向dr1”。第一方向dr1例如是与铅垂方向平行的方向。此外,将与第一方向dr1相反的方向定义为“第二方向dr2”。
26.在本说明书中,将从卡盘主体62朝向位于第二位置p2的储料器20(更具体而言,储料器20的卡爪接收部21a)的方向定义为“第三方向dr3”。第三方向dr3例如是与铅垂方向平行的方向。第三方向dr3例如与第一方向dr1平行。此外,将与第三方向dr3相反的方向定义为“第四方向dr4”。
27.在本说明书中,将从卡爪接收装置10朝向机床100的中央部的方向定义为“第五方向dr5”。第五方向dr5例如是从机床100的框体85(或者机床100的前面101b)朝向机床100的中央部的方向。
28.在本说明书中,将从机床100的第一侧面101c朝向第二侧面101d的方向定义为“第六方向dr6”。第六方向dr6例如与横向对应。
29.在本说明书中,卡盘主体62是经由卡爪c保持对象物(更具体而言,作为加工对象物的工件)的部件。卡爪在日语中也被称为“爪”。在本说明书中,将经由卡爪接收装置10保管在储料器20中的卡爪记述为“卡爪cn”,将其他的卡爪记述为“卡爪c”。
30.在本说明书中,机床100是能够对作为加工对象物的工件进行加工的任意的机械。机床例如是能够对金属进行切断、切削或研磨的机械。本说明书中的机床也可以是能够执行多个不同种类的加工的复合加工机(例如复合加工车床)。此外,本说明书中的机床也可以是车床(转塔型车床、梳刀型车床、卧式车床、立式车床等)。
31.(第一实施方式)
32.参照图1对第一实施方式的卡爪更换装置1a以及机床100a进行说明。图1是示意性地表示第一实施方式的卡爪更换装置1a以及机床100a的配置的一例的概要俯视图。另外,
在图1中,省略机床100a的一部分(例如框体85的顶部)的记载。
33.第一实施方式的卡爪更换装置1a具备储料器20、储料器移动机构m以及卡爪移送装置40。
34.卡爪更换装置1a是能够将保持于卡盘主体62的卡爪c与其他卡爪进行更换的装置。卡盘主体62经由卡爪c保持工件(换言之,加工对象物)。此外,卡盘主体62能够绕旋转轴ax旋转。通过卡盘主体62绕旋转轴ax旋转,使由多个卡爪c保持的工件绕旋转轴ax旋转。绕旋转轴ax旋转的工件被安装于加工装置70的刀具72加工。在图1所记载的例子中,旋转轴ax与第六方向dr6平行。
35.储料器20是能够保管卡爪c的装置。优选储料器20具备能够保持卡爪c的卡爪支架21。在图1所记载的例子中,储料器20具备多个卡爪支架21。多个卡爪支架21能够分别保持多个卡爪c。换言之,储料器20能够经由多个卡爪支架21保管多个卡爪c。
36.在图1所记载的例子中,能够经由卡爪移送装置40向储料器20保管新的卡爪cn。详细情况后述。
37.储料器移动机构m使储料器20在第一位置p1(参照图1的虚线)与第二位置p2(参照图1的双点划线)之间移动。储料器移动机构m包括使储料器20移动的驱动装置31。驱动装置31可以是马达,也可以是致动器(例如液压式致动器)。
38.第一位置p1与储料器20从卡爪接收装置10接收卡爪cn的卡爪接收位置或者从储料器20向卡爪接收装置10取出卡爪c的卡爪取出位置对应。
39.此外,第二位置p2与卡爪更换位置对应。更具体而言,第二位置p2与用于将安装于卡盘主体62的卡爪c向储料器20回收的位置对应。此外,第二位置p2与用于将储料器20中保管的卡爪c供给至卡盘主体62的位置对应。
40.在图1所记载的例子中,储料器20具有卡爪接收部21a。卡爪接收部21a例如是位于储料器20的第一端部20a的卡爪支架21。
41.卡爪移送装置40将卡爪cn从卡爪接收装置10移送到位于第一位置p1的储料器20(更具体而言,位于第一位置p1的储料器20的卡爪接收部21a)。从卡爪接收装置10向卡爪接收部21a的卡爪cn的移送例如通过卡爪移送装置40将卡爪cn向上方上推来执行。
42.卡爪移送装置40将卡爪c从位于第二位置p2的储料器20移送到卡盘主体62。在图1所记载的例子(参照图1的双点划线)中,卡爪移送装置40将卡爪c从位于储料器20的第一端部20a的卡爪支架21移送到卡盘主体62。该卡爪c的移送例如通过卡爪移送装置40将卡爪c向下方推压来执行。
43.在第一实施方式的卡爪更换装置1a中,储料器20能够移动到卡爪接收位置(第一位置p1)。此外,卡爪移送装置40能够将卡爪cn从卡爪接收装置10移送到位于第一位置p1的储料器20。因此,作业者(或机器人)仅通过将卡爪cn配置在卡爪接收装置10,就能够将该卡爪cn保管到储料器20。换言之,在第一实施方式中,能够容易地执行将卡爪cn保管到储料器20的作业。
44.在第一实施方式中,卡爪更换装置1a也可以具备接收卡爪cn的卡爪接收装置10(卡爪接收器)。
45.卡爪接收装置10配置在能够从机床100a的外部接收卡爪cn的位置。从机床100a的外部向卡爪接收装置10的卡爪cn的供给例如由作业者或机器人进行。
46.在图1所记载的例子中,卡爪接收装置10包括能够保持卡爪cn的保持件12。在该情况下,作业者或机器人只要将卡爪cn从机床100a的外部供给到卡爪接收装置10的保持件12即可。
47.在图1所记载的例子中,能够经由卡爪接收装置10和卡爪移送装置40将卡爪cn保管到储料器20。因此,在将卡爪cn保管到储料器20时,作业者无需进入机床100a的内部(更具体而言,框体85的内部)。因此,在第一实施方式中,在向储料器20保管卡爪cn时,无需停止机床100a的驱动(例如卡盘主体62的旋转驱动或者加工装置70的驱动)。
48.但是,在第一实施方式中,不排除不经由卡爪接收装置10和卡爪移送装置40而将卡爪cn保管到储料器20中。换言之,也可以在使机床100a的驱动停止的状态下,作业者进入机床100a的内部。进入机床100a内部的作业者能够通过与以往相同的方法将卡爪cn保管到储料器20中。
49.在图1所记载的例子(参照图1的虚线)中,卡爪接收装置10和位于第一位置p1的储料器20(更具体而言,卡爪接收部21a或储料器20的第一端部20a)沿着第一方向dr1(更具体而言,沿着铅垂方向)配置。因此,卡爪移送装置40仅通过使卡爪cn向第一方向dr1(更具体而言,上方向)移动,就能够将卡爪cn从卡爪接收装置10移载到储料器20。这样,在图1所记载的例子中,能够在短时间内执行从卡爪接收装置10向储料器20的卡爪cn的移载。
50.在图1所记载的例子中,在通过加工装置70对工件进行加工的过程中,能够将储料器20维持在上述的第一位置p1(参照图1的虚线)。在该情况下,即使在工件的加工中,也能够在短时间内执行从卡爪接收装置10向储料器20的卡爪cn的移载(换言之,保管)。
51.卡爪移送装置40仅通过使卡爪c向第二方向dr2(更具体而言,下方向)移动,就能够将卡爪c从储料器20取出到卡爪接收装置10。这样,在图1所记载的例子中,能够在短时间内执行从储料器20向卡爪接收装置10的卡爪c的取出。
52.第一实施方式的机床100a具备:卡爪更换装置1a;经由卡爪c保持工件的卡盘主体62;将卡盘主体62支承为能够旋转的支承部件66;安装刀具72的加工装置70;以及控制装置90。机床100a也可以具备框体85(包围卡爪更换装置1a、卡盘主体62、支承部件66以及加工装置70的框体85)。
53.从容易向卡爪接收装置10配置卡爪cn的作业的观点出发,优选卡爪接收装置10配置在框体85的附近(例如从框体85起50cm以内的距离或者从框体起30cm以内的距离)。可代替地或者附加地,优选卡爪接收装置10配置在能够经由设置于框体85的访问开口as访问的位置(例如手从访问开口as到达的位置)。
54.在图1所记载的例子中,卡爪接收装置10设置在框体85的附近或者设置于框体85的访问开口as的附近。因此,作业者(或机器人)能够容易地将卡爪cn配置到卡爪接收装置10。
55.从容易向卡爪接收装置10配置卡爪cn的作业的观点出发,优选卡爪接收装置10配置在机床100a的前面101b侧的区域。可代替地或者附加地,优选访问开口as配置在框体85的前面101b。通过将用于访问卡爪接收装置10的访问开口as配置在机床100a的前面101b,作业者能够在通常的作业位置处将卡爪cn配置到卡爪接收装置10。换言之,作业者无需为了保管卡爪cn而从机床100a的前面101b侧向机床的背面101a侧(或者机床100a的侧面侧或机床100a的内部)移动。
56.在图1所记载的例子中,卡爪移送装置40能够与储料器20一起移动。更具体而言,卡爪移送装置40安装于储料器20。在该情况下,能够使用一个卡爪移送装置40,执行从卡爪接收装置10向储料器20的卡爪cn的移载以及从储料器20向卡盘主体62的卡爪c的移载。换言之,能够将从卡爪接收装置10向位于第一位置p1的储料器20移送卡爪cn的第一卡爪移送装置40a以及从位于第二位置p2的储料器20向卡盘主体62移送卡爪c的第二卡爪移送装置40b设为同一装置。
57.在卡爪移送装置40能够与储料器20一起移动的情况下,卡爪更换装置1a所具备的卡爪移送装置40的个数可以较少。此外,在卡爪移送装置40安装于储料器20的情况下,无需在每次移动储料器20时都使储料器20与卡爪移送装置40对位。
58.在图1所记载的例子中,储料器20配置在支承部件66的上方,该支承部件66将卡盘主体62支承为能够旋转。换言之,在图1所记载的例子中,在支承部件66的上方的空间配置储料器20。在该情况下,能够有效地活用支承部件66的上方的空间,其结果是,能够使机床100a的尺寸紧凑。
59.在图1所记载的例子(参照图1的双点划线)中,当储料器20位于第二位置p2时,储料器20的卡爪接收部21a或者储料器20的第一端部20a在俯视下位于与卡盘主体62重叠的位置。
60.另一方面,当储料器20位于第一位置p1时,储料器20的卡爪接收部21a或者储料器20的第一端部20a在俯视下位于不与卡盘主体62和支承部件66重叠的位置(非重叠的位置)。在该情况下,当从卡爪接收装置10向储料器20移载卡爪cn时,卡盘主体62和支承部件66不会造成妨碍。
61.在图1所记载的例子中,储料器移动机构m具备第一移动机构m1(例如马达、致动器等的驱动装置31),该第一移动机构m1使储料器20在第一角度位置ap1与第二角度位置ap2之间旋转移动。上述的第一角度位置ap1例如是储料器20的长边方向相对于卡盘主体62的旋转轴ax倾斜的角度位置。此外,第二角度位置ap2是储料器20的长边方向与卡盘主体62的旋转轴ax平行的角度位置。在图1所记载的例子中,上述的第一角度位置ap1与第一位置p1对应,上述的第二角度位置ap2与第二位置p2对应。
62.在储料器20能够绕旋转轴ax1旋转的情况下,与接近储料器20的旋转轴ax1的部分(例如储料器20的第二端部20b)的移动量相比,能够增大储料器20的第一端部20a的移动量。在该情况下,能够使储料器20的移动所需的空间紧凑,并增大第一端部20a的移动行程(换言之,卡爪接收部21a的移动行程)。
63.(第二实施方式)
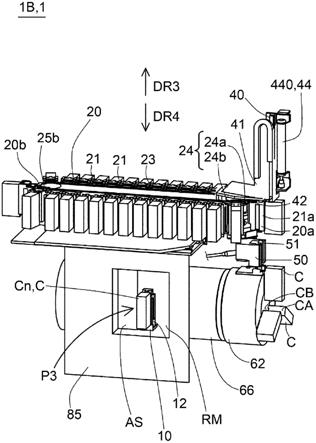
64.参照图2至图10对第二实施方式的卡爪更换装置1b以及机床100b进行说明。图2是示意性地表示第二实施方式的卡爪更换装置1b的概要立体图。图3是放大表示卡爪更换装置1b的一部分的概要放大主视图。图4至图6是示意性地表示第二实施方式的卡爪更换装置1b的概要俯视图。图7是示意性地表示第二实施方式的卡爪更换装置1b的概要主视图。图8是放大表示卡爪更换装置1b的一部分的概要放大主视图。图9是示意性地表示卡爪接收装置10的一例的概要立体图。图10是示意性地表示第二实施方式的卡爪更换装置1b以及机床100b的配置的一例的概要主视图。另外,图4表示储料器20位于第二位置p2时的状态,图5表示储料器20位于第二位置p2与第一位置p1之间的位置(中间位置pm)时的状态,图6表示储
料器20位于第一位置p1时的状态。另外,在图4至图7中省略了卡爪更换装置1b的一部分的记载。例如,在图4至图6中明示了配置卡爪接收装置10的区域ar,但省略了卡爪接收装置10本身的记载。此外,在图7中省略了卡爪接收装置10的记载。
65.在第二实施方式中,以与第一实施方式的不同点为中心进行说明。另一方面,在第二实施方式中,省略对在第一实施方式已说明的事项的反复说明。因此,在第二实施方式中,即使没有明确说明,当然也能够将在第一实施方式已说明的事项应用于第二实施方式。
66.第二实施方式的卡爪更换装置1b具备储料器20、储料器移动机构m以及卡爪移送装置40。卡爪更换装置1b也可以具备卡爪接收装置10。关于储料器20、储料器移动机构m、卡爪移送装置40以及卡爪接收装置10的概要和功能,在第一实施方式已说明。因此,省略对这些结构的概要和功能的反复说明。
67.(储料器20)
68.参照图2对储料器20的一例进行说明。在图2所记载的例子中,储料器20包括多个卡爪支架21、环形链条23和链条驱动装置24。
69.多个卡爪支架21能够分别保持卡爪c。更具体而言,卡爪支架21能够与卡爪c卡合。例如,当卡爪支架21与卡爪c在俯视下对位的状态下,通过使卡爪c沿着铅垂方向移动(例如通过使卡爪c向上方移动),能够使卡爪c与卡爪支架21卡合。此外,通过使保持于卡爪支架21的卡爪c沿着铅垂方向移动(例如通过使卡爪c向下方移动),能够解除卡爪支架21与卡爪c之间的卡合。
70.在图2所记载的例子中,储料器20具备30个卡爪支架21(两个卡爪支架隐藏在卡爪移送装置40的背后)。但是,储料器20所具备的卡爪支架21的个数并不限定于30个,可以是任意的。
71.多个卡爪支架21以能够循环式地移动的方式支承于环形链条23。环形链条23由链条驱动装置24驱动。
72.在图2所记载的例子中,链条驱动装置24具备马达24a以及由马达24a驱动的第一链轮24b。在图2所记载的例子中,第一链轮24b与第二链轮25b与环形链条23卡合。
73.在图2所记载的例子中,从第一链轮24b朝向第二链轮25b的方向(或者从第二链轮25b朝向第一链轮24b的方向)与储料器20的长边方向对应。
74.(卡爪c)
75.在图2所记载的例子中,在卡盘主体62安装有3个卡爪c。换言之,卡盘主体62经由由3个卡爪c构成的1组卡爪保持工件。
76.在由3个卡爪c构成1组卡爪的情况下,优选构成1组的3个卡爪分别保持于在卡爪支架的循环移动方向上连续的3个卡爪支架21。
77.在图2所记载的例子中,卡爪c具备:与工件抵接的抵接面ca;保持于卡盘主体62的基端部cb;以及能够与卡爪移送装置40的卡合部件卡合的卡合部cc(参照图3)。基端部cb具有与卡盘主体62的槽部互补的形状。此外,在向卡盘主体62安装卡爪c时(或者从卡盘主体62卸下卡爪c时),卡爪c的基端部cb被卡盘主体62的槽部引导。
78.(储料器移动机构m)
79.参照图4至图7对储料器移动机构m进行说明。储料器移动机构m是能够使储料器20经由中间位置pm(intermediate position)在第一位置p1与第二位置p2之间移动。
80.如第一实施方式中说明的那样,第一位置p1(参照图6)与储料器20从卡爪接收装置10(配置在区域ar的卡爪接收装置10)接收卡爪cn的卡爪接收位置或者从储料器20向卡爪接收装置10取出卡爪c的卡爪取出位置对应。
81.中间位置pm(参照图5)是第一位置p1与第二位置p2之间的位置,与从储料器20开始移动到储料器20结束移动为止的移动中途的储料器20的位置对应。
82.如第一实施方式中说明的那样,第二位置p2(参照图4)与卡爪更换位置对应。更具体而言,第二位置p2与用于将安装于卡盘主体62的卡爪c向储料器20回收的位置对应。此外,第二位置p2与用于将储料器20中保管的卡爪c供给到卡盘主体62的位置对应。
83.在图4和图5所记载的例子中,储料器移动机构m具备第一移动机构m1。第一移动机构m1是使储料器20在第一角度位置ap1(参照图5)与第二角度位置ap2(参照图4)之间旋转移动。第一角度位置ap1例如是储料器20的长边方向相对于卡盘主体62的旋转轴ax倾斜的角度位置。此外,第二角度位置ap2例如是储料器20的长边方向与卡盘主体62的旋转轴ax平行的角度位置。
84.第一移动机构m1包括限定旋转轴ax1的销部件以及使储料器20绕旋转轴ax1旋转的驱动装置31(参照图7)。驱动装置31可以是马达,也可以是致动器(例如液压式致动器)。旋转轴ax1例如是与铅垂方向平行的轴。在图4所记载的例子中,旋转轴ax1配置在储料器20的第二端部20b侧的区域。
85.在图4所记载的例子中,上述的第二角度位置ap2与第二位置p2对应。此外,在图5所记载的例子中,上述的第一角度位置ap1与中间位置pm对应。另外,第一角度位置ap1也与第一位置p1(参照图6)对应。
86.关于储料器移动机构m具备第一移动机构m1(换言之,使储料器20旋转移动的机构)所带来的效果,在第一实施方式中已说明。因此,省略对该效果的反复说明。
87.在图4和图5所记载的例子中,当储料器20绕旋转轴ax1旋转时,沿着旋转轴ax的方向上的储料器20的第一端部20a的移动量较小。因此,在图5所示的中间位置pm处,沿着旋转轴ax的方向上的储料器20的退避量有可能不充分。因此,储料器移动机构m除了第一移动机构m1之外,优选还具有能够使储料器20相对于卡盘主体62直线移动的第二移动机构m2。
88.在图5和图6所记载的例子中,第二移动机构m2能够使储料器20在沿着卡盘主体62的旋转轴ax的方向上直线移动。更具体而言,第二移动机构m2使储料器20在中间位置pm(参照图5)与第一位置p1(参照图6)之间移动。
89.第二移动机构m2具备第二驱动装置32(参照图7)。第二移动机构m2也可以具备引导部件33(参照图5)以及滑块34。
90.第二驱动装置32使储料器20沿着引导部件33(例如导轨)移动。在图5所记载的例子中,第二移动机构m2包括能够相对于引导部件33直线移动的滑块34,储料器20被该滑块34支承。
91.使滑块34和被滑块34支承的储料器20移动的第二驱动装置32可以是马达,也可以是致动器(例如液压式致动器)。
92.在图4至图7所记载的例子中,储料器移动机构m具备能够使储料器20旋转移动的第一移动机构m1以及能够使储料器20直线移动的第二移动机构m2。在该情况下,能够使储料器20移动所需的空间紧凑,与储料器20的第二端部20b的移动行程相比,能够增大储料器
20的第一端部20a的移动行程。并且,能够增大沿着卡盘主体62的旋转轴ax的方向上的储料器20的退避量。
93.另外,在第二实施方式中,储料器移动机构m也可以仅具备能够使储料器20旋转移动的第一移动机构m1以及能够使储料器20直线移动的第二移动机构m2中的一方。此外,储料器移动机构m也可以具备能够使储料器20直线移动的两个移动机构。例如,储料器移动机构m也可以具备使储料器20在与卡盘主体62的旋转轴ax平行的方向上移动的移动机构以及使储料器20在与旋转轴ax垂直的方向上移动的移动机构。
94.(储料器20的支承构造)
95.在图7所记载的例子中,储料器20配置在支承部件66的上方,该支承部件66将卡盘主体62支承为能够旋转。此外,储料器20不经由支承部件66而被位于支承部件66的下方的基座80支承。
96.在储料器20不经由支承部件66而由基座80支承的情况下,储料器20工作(例如环形链条23的驱动)时产生的振动难以向支承部件66传递。因此,即使在同时执行被卡盘主体62保持的工件的加工以及从卡爪接收装置10向储料器20的卡爪cn的保管的情况下,工件的加工精度也不会恶化。
97.另外,在图7所记载的例子中,在基座80上固定构造部件82,在该构造部件82上经由上述的储料器移动机构m安装储料器20。优选构造部件82配置在将卡盘主体62支承为能够旋转的支承部件66的周围。此外,优选构造部件82不与支承部件66直接接触。
98.在图7所记载的例子中,将卡盘主体62支承为能够旋转的支承部件66以及上述的构造部件82固定在同一基座80上。可代替地,固定支承部件66的基座与固定上述的构造部件82的基座80也可以是不同的基座。
99.(卡爪移送装置40)
100.参照图2和图3对卡爪移送装置40进行说明。在图2所记载的例子中,卡爪移送装置40经由托架41等安装于储料器20。因此,当储料器20从第一位置p1移动到第二位置p2时,卡爪移送装置40也从第一位置p1移动到第二位置p2。
101.在图2所记载的例子中,卡爪移送装置40包括能够与卡爪c的卡合部cc卡合的卡合部件42以及使卡合部件42移动的第三驱动装置44。
102.在图3所记载的例子中,第三驱动装置44包括使卡合部件42直线移动的线性驱动装置440。线性驱动装置440通过使卡合部件42直线移动,能够使与卡合部件42卡合的卡爪c直线移动。线性驱动装置440例如为马达或致动器(例如电动式致动器、液压式致动器等)。在图3所记载的例子中,线性驱动装置440使卡合部件42沿着第一方向dr1或者第三方向dr3(更具体而言,铅垂方向)移动。
103.在图3所记载的例子中,第三驱动装置44包括使卡合部件42旋转移动的旋转驱动装置445。旋转驱动装置445通过使卡合部件42绕旋转轴ax2旋转,能够使卡合部件42与卡爪c的卡合部cc卡合。此外,旋转驱动装置445通过使卡合部件42绕旋转轴ax2旋转,能够解除卡合部件42与卡爪c的卡合部cc之间的卡合。
104.在图3所记载的例子中,线性驱动装置440的固定部440a固定于托架41等。此外,在线性驱动装置440的移动部440b安装有移动件43(例如移动块)。此外,在移动件43安装有旋转驱动装置445。该旋转驱动装置445将卡合部件42支承为能够绕旋转轴ax2旋转。
105.通过卡爪移送装置40具备旋转驱动装置445,能够迅速地进行卡合部件42与卡爪c的卡合部cc之间的卡合(或者卡合解除)。此外,通过卡爪移送装置40具备线性驱动装置440,能够使卡爪c稳定地直线移动。
106.(导向块50)
107.从稳定且准确地实施卡爪c的直线移动的观点出发,如图2所示,优选卡爪更换装置1b具备导向块50。
108.导向块50在储料器20与卡盘主体62之间的区域引导卡爪c的直线移动。此外,导向块50在储料器20与卡爪接收装置10之间的区域引导卡爪c的直线移动。
109.在图2所记载的例子中,导向块50安装于储料器20。此外,导向块50相对于储料器20配置在与卡爪移送装置40相反的一侧。更具体而言,在图2所记载的例子中,卡爪移送装置40配置在储料器20的上方,导向块50配置在储料器20的下方。如图2所示,当储料器20位于第二位置p2时,导向块50配置在储料器20(更具体而言,储料器20的第一端部20a)与卡盘主体62之间。
110.在图2所记载的例子中,导向块50具备引导卡爪c的基端部cb的槽51。槽51的延伸方向是与第三方向dr3(更具体而言,铅垂方向)平行的方向。
111.在图8所记载的例子中,导向块50具备操作机构g,该操作机构g操作设置于卡盘主体62的锁定解除操作部620。操作机构g例如具备能够按压锁定解除操作部620的按压部件53以及使该按压部件53移动的第四驱动装置55。第四驱动装置55例如是马达或者致动器。
112.通过按压部件53按压锁定解除操作部620,卡盘主体62与卡爪c之间的锁定状态(换言之,固定状态)被解除。在锁定状态被解除时,卡爪移送装置40能够将卡爪c从卡盘主体62拔出。此外,在按压部件53按压锁定解除操作部620的状态下,卡爪移送装置40能够在卡盘主体62安装新的卡爪c。
113.(卡爪接收装置10)
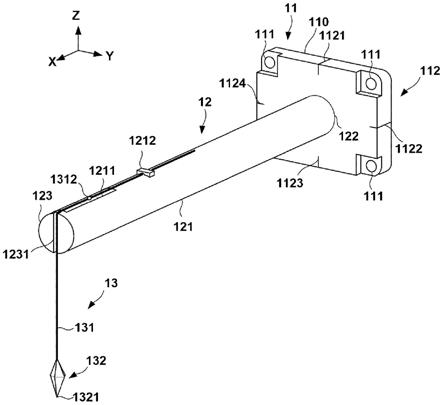
114.在图9所记载的例子中,卡爪接收装置10包括能够保持卡爪c的保持件12以及使保持件12移动的保持件驱动装置14(第五驱动装置)。
115.在图9所记载的例子中,保持件12具备与卡爪c的凸部cd卡合的卡合部13。优选该卡合部13是允许卡爪c在与第一方向dr1平行的方向上相对于保持件12相对移动的卡合部。此外,优选卡合部13是禁止卡爪c在与第一方向dr1平行的方向以外的方向上相对于保持件12相对移动的卡合部。
116.保持件驱动装置14使保持件12经由中间位置pn(intermediate position)在第三位置p3与第四位置p4之间移动。
117.第三位置p3与保持件12从作业者或机器人接收卡爪cn的位置(或者作业者或机器人从保持件12取出卡爪c的位置)对应。中间位置pn与第三位置p3与第四位置p4之间的位置,换言之,从保持件12开始移动到保持件12结束移动为止的移动中途的保持件12的位置对应。此外,第四位置p4与卡爪移送装置40从保持件12取出卡爪cn的位置(或者,保持件12从卡爪移送装置40接收卡爪c的位置)对应。当保持件12移动到第四位置p4且储料器20移动到第一位置p1时,保持件12与储料器20(更具体而言,储料器20的卡爪接收部21a)自动相互对位。此外,当保持件12移动到第四位置p4且储料器20移动到第一位置p1时,保持件12与卡爪移送装置40自动相互对位。
118.从位于第四位置p4的保持件12朝向位于第一位置p1的储料器20(更具体而言,储料器20的第一端部20a)的方向相对于第一方向dr1(更具体而言,铅垂方向)平行。在该情况下,卡爪移送装置40仅通过使卡爪cn朝从保持件12朝向储料器20的方向亦即第一方向dr1(更具体而言,铅垂上方向)移动,就能够将卡爪cn保管到储料器20中。
119.第三位置p3是与第四位置p4相比接近框体85(更具体而言,访问开口as)的位置。在该情况下,作业者或机器人能够容易地访问位于第三位置p3的保持件12。另外,从位于第三位置p3的保持件12朝向位于第一位置p1的储料器20(更具体而言,储料器20的第一端部20a)的方向相对于第一方向dr1(更具体而言,铅垂方向)不平行。
120.在图9所记载的例子中,卡爪接收装置10具备保持件12以及使保持件12移动的保持件驱动装置14。在该情况下,能够将保持件12的位置或姿势变更为容易从作业者或机器人访问的位置或姿势,且能够将保持件12的位置或姿势变更为容易从卡爪移送装置40访问的位置或姿势。
121.在图9所记载的例子中,保持件驱动装置14能够使保持件12的位置变化,并且使保持件12的姿势(例如保持件12的朝向)变化。
122.在图9所记载的例子中,保持件驱动装置14包括使保持件12直线移动的线性驱动装置14a以及使保持件12绕旋转轴旋转移动的旋转驱动装置14b。
123.线性驱动装置14a例如是马达或致动器。线性驱动装置14a能够使保持件12朝远离机床100b的框体85的方向(更具体而言,第五方向dr5)直线移动。假设作业者或机器人在保持件12配置卡爪cn的情况(参照图9中的实线)。在该情况下,线性驱动装置14a使保持件12朝第五方向dr5移动,由此,保持件12和被保持件12保持的卡爪cn从第三位置p3移动到中间位置pn(参照图9中的双点划线)。
124.旋转驱动装置14b例如是马达或致动器。旋转驱动装置14b能够使保持件12绕旋转轴旋转移动。通过保持件12旋转移动,被保持件12保持的卡爪cn的姿势(更具体而言,卡爪cn的朝向)发生变更。假设保持卡爪cn的保持件12位于中间位置pn的情况(参照图9中的双点划线)。在该情况下,通过旋转驱动装置14b使保持件12旋转移动(参照箭头f。),保持件12和被保持件12保持的卡爪cn从中间位置pn移动到第四位置p4(参照图9中的虚线)。
125.在卡爪接收装置10具备旋转驱动装置14b的情况下,能够使被保持件12保持的卡爪c的姿势在作业者或机器人容易处理的第一姿势与能够由储料器20或卡爪移送装置40接收的第二姿势之间变更。
126.在图9所记载的例子中,旋转驱动装置14b固定于托架15。此外,保持件12被托架15支承为能够相对于托架15旋转。
127.在图9所记载的例子中,线性驱动装置14a的移动部与托架15连接,通过线性驱动装置14a使托架15移动,被托架15支承的旋转驱动装置14b和保持件12直线移动。
128.在图9所记载的例子中,保持件驱动装置14包括线性驱动装置14a以及旋转驱动装置14b。可代替地,保持件驱动装置14也可以仅包括线性驱动装置14a和旋转驱动装置14b中的一方。
129.(机床100b)
130.在图10所记载的例子中,机床100b除了卡爪更换装置1b之外,还具备:卡盘主体62;将卡盘主体62支承为能够旋转的支承部件66;使卡盘主体62绕旋转轴ax旋转的旋转驱
动装置67;安装刀具72的加工装置70;框体85(包围卡爪更换装置1b、卡盘主体62、支承部件66、旋转驱动装置67以及加工装置70的框体85);以及控制装置90。
131.在图10所记载的例子中,卡爪接收装置10配置在作业者或机器人能够经由设置于框体85的访问开口as访问的位置。卡爪接收装置10或访问开口as的高度例如低于储料器20的高度。此外,卡爪接收装置10或访问开口as的高度例如与卡盘主体62的高度大致相等。
132.卡爪接收装置10与卡盘主体62或者支承部件66相比,配置在接近框体85的位置。优选卡爪接收装置10配置在机床100b的前面侧的区域。
133.优选在框体85设置使访问开口as开关自如的门86(例如具备透明的窗的门)。当门86位于打开状态时,作业者或机器人能够经由访问开口as访问卡爪接收装置10。另一方面,当门86位于关闭状态时,卡爪移送装置40能够访问卡爪接收装置10。
134.在图2所记载的例子中,机床100b具备与访问开口as连通的卡爪收纳室rm。位于第三位置p3的保持件12位于卡爪收纳室rm的内部。
135.(控制装置90)
136.控制装置90对储料器20(更具体而言,储料器20的链条驱动装置24)、储料器移动机构m和卡爪移送装置40进行控制。控制装置90也可以对卡爪接收装置10的保持件驱动装置14和/或导向块50的第四驱动装置55进行控制。此外,控制装置90也可以对使卡盘主体62旋转的旋转驱动装置67进行控制。控制装置90分别与储料器20、储料器移动机构m、卡爪移送装置40、保持件驱动装置14以及导向块50的第四驱动装置55以能够传递控制信号的方式连接。
137.(卡爪c的保管方法)
138.参照图1至图11对使用实施方式的卡爪更换装置1执行的卡爪cn的保管方法进行说明。图11是表示卡爪cn的保管方法的一例的流程图。此处,假设储料器20的位置已经位于第一位置p1的情况。另外,在储料器20的位置不位于第一位置p1的情况下,在后述的第三步骤st3的结束之前,将储料器20的位置变更为第一位置p1。
139.在第一步骤st1中,卡爪接收装置10(更具体而言,保持件12)从作业者或机器人接收卡爪cn。
140.在第二步骤st2中,卡爪接收装置10的保持件12从第三位置p3移动到第四位置p4。通过保持件驱动装置14从控制装置90收到控制信号,保持件驱动装置14根据接收到的控制信号使保持件12移动,由此执行保持件12的移动。在保持件驱动装置14具备线性驱动装置14a的情况下,保持件12的移动包括保持件12的直线移动。此外,在保持件驱动装置14具备旋转驱动装置14b的情况下,保持件12的移动包括保持件12的旋转移动。在保持件驱动装置14具备线性驱动装置14a和旋转驱动装置14b的情况下,保持件12的移动包括保持件12的直线移动和保持件12的旋转移动。
141.另外,在保持件12是无法移动的保持件的情况下,省略第二步骤st2。
142.在第三步骤st3中,对储料器20的链条驱动装置24进行驱动,以使储料器20的卡爪接收部21a(空的卡爪支架21)的位置成为相对于卡爪接收装置10对位的位置(更具体而言,卡爪接收装置10的铅垂上方的位置)。响应于链条驱动装置24从控制装置90接收到控制信号,执行链条驱动装置24的驱动。
143.在第四步骤st4中,通过卡爪移送装置40将卡爪cn从卡爪接收装置10移送至储料
器20的卡爪接收部21a(空的卡爪支架21)。响应于第三驱动装置44(更具体而言,线性驱动装置440和/或旋转驱动装置445)从控制装置90接收到控制信号,执行该卡爪cn的移送。更具体而言,响应于线性驱动装置440从控制装置90接收到控制信号,线性驱动装置440使卡合部件42朝第二方向dr2移动。接着,响应于旋转驱动装置445从控制装置90接收到控制信号,旋转驱动装置445使卡合部件42绕旋转轴ax2旋转。通过该旋转,卡合部件42与卡爪cn的卡合部cc卡合。接下来,响应于线性驱动装置440从控制装置90接收到控制信号,线性驱动装置440使卡合部件42朝第一方向dr1移动。通过该卡合部件42的移动,卡爪cn与卡合部件42一起朝第一方向dr1移动。其结果是,卡爪cn被储存到储料器20中。
144.通过以上的工序,能够将卡爪cn保管到储料器20中。另外,在执行第一步骤st1至第四步骤st4的过程中,作业者无需进入机床100的内部。因此,在执行上述的卡爪的保管方法时,无需中断机床100对工件的加工。此外,从卡爪接收装置10向储料器20的卡爪cn的移送是基于卡爪移送装置40的直线移送。因此,能够在短时间内稳定地进行卡爪cn的移送。
145.(卡爪c的更换方法)
146.参照图1至图10、图12对使用实施方式的卡爪更换装置1执行的卡爪c的更换方法进行说明。图12是表示卡爪c的更换方法的一例的流程图。此处,假定在执行卡爪c的更换方法之前,储料器20的位置位于第一位置p1的情况。
147.在第一步骤st101中,储料器20从第一位置p1移动到第二位置p2。通过储料器移动机构m从控制装置90接收控制信号,储料器移动机构m(更具体而言,第一移动机构m1和/或第二移动机构m2)根据接收到的控制信号使储料器20移动,由此执行储料器20的移动。
148.在第二步骤st102中,对储料器20的链条驱动装置24进行驱动,以使储料器20的卡爪接收部21a(空的卡爪支架21)的位置成为相对于卡盘主体62对位的位置(更具体而言,卡盘主体62的铅垂上方的位置)。响应于链条驱动装置24从控制装置90接收到控制信号,执行链条驱动装置24的驱动。此外,在第二步骤st102中,卡盘主体62绕旋转轴ax旋转,以使被卡盘主体62保持的卡爪c的位置成为拆卸位置。拆卸位置例如与应回收的卡爪c的位置成为最高的位置对应。
149.在第三步骤st103中,通过卡爪移送装置40从卡盘主体62向储料器20的卡爪接收部21a(空的卡爪支架21)移送卡爪c。响应于第三驱动装置44(更具体而言,线性驱动装置440和/或旋转驱动装置445)从控制装置90接收到控制信号,执行该卡爪c的移送。通过执行第三步骤st103,安装于卡盘主体62的卡爪c被回收到储料器20中。
150.第二步骤st102与第三步骤st103反复执行与应从卡盘主体62回收的卡爪c的个数相同的次数。例如,在应从卡盘主体62回收的卡爪c的个数为3个的情况下,第二步骤st102与第三步骤st103反复执行3次。
151.在第四步骤st104中,对储料器20的链条驱动装置24进行驱动,以使储料器20的卡爪供给部(保持卡爪c的卡爪支架21)的位置成为相对于卡盘主体62对位的位置(更具体而言,卡盘主体62的铅垂上方的位置)。响应于链条驱动装置24从控制装置90接收到控制信号,执行链条驱动装置24的驱动。此外,在第四步骤st104中,卡盘主体62绕旋转轴ax旋转,以使卡盘主体62的槽部(接收卡爪c的槽部)的位置成为安装位置。安装位置例如与卡盘主体62的槽部朝向上方的位置对应。
152.在第五步骤st105中,通过卡爪移送装置40从储料器20的卡爪供给部(保持卡爪c
的卡爪支架21)向卡盘主体62移送卡爪c。响应于第三驱动装置44(更具体而言,线性驱动装置440和/或旋转驱动装置445)从控制装置90接收到控制信号,执行该卡爪c的移送。通过执行第五步骤st105,在卡盘主体62安装卡爪c。
153.第四步骤st104与第五步骤st105反复执行与应安装于卡盘主体62的卡爪c的个数相同的次数。例如,在安装于卡盘主体62的卡爪c的个数为3个的情况下,第四步骤st104与第五步骤st105反复执行3次。
154.在第六步骤st106中,储料器20从第二位置p2移动到第一位置p1。通过储料器移动机构m从控制装置90接收到控制信号,储料器移动机构m(更具体而言,第一移动机构m1和/或第二移动机构m2)根据接收到的控制信号使储料器20移动,执行储料器20的移动。
155.通过以上的工序,能够更换安装于卡盘主体62的卡爪c。
156.本发明并不限定于上述各实施方式,在本发明的技术思想的范围内,可以将各实施方式适当变形或者变更。此外,各实施方式中使用的各种技术只要不产生技术矛盾,就能够应用于其他实施方式。进而,各实施方式中的任意附加结构可以适当省略。
157.例如,在上述的实施方式中,对机床100具备一个卡爪更换装置1的例子进行了说明。可代替地,机床100也可以具备两个以上的卡爪更换装置。例如,在机床具备多个工件保持装置(换言之,多个卡盘主体62)的情况下,也可以设置与工件保持装置的个数对应个数的卡爪更换装置。可代替地,在多个工件保持装置中,可以共用一个卡爪更换装置。
158.此外,在上述的实施方式中,储料器20中保管的卡爪的尺寸没有特别限定。换言之,实施方式的卡爪更换装置可以用于任意尺寸的卡爪的更换。此外,在上述的实施方式中,储料器20中保管的一个卡爪c的抵接面ca的构造或形状可以与储料器20中保管的其他卡爪c的抵接面ca的构造或形状相同,也可以不同。
159.附图标记说明:
160.1、1a、1b:卡爪更换装置;10:卡爪接收装置;12:保持件;13:卡合部;14:保持件驱动装置;14a:线性驱动装置;14b:旋转驱动装置;15:支架;20:储料器;20a:第一端部;20b:第二端部;21:卡爪支架;21a:卡爪接收部;23:环形链条;24:链条驱动装置;24a:马达;24b:第一链轮;25b:第二链轮;31:驱动装置;32:第二驱动装置;33:引导部件;34:滑块;40:卡爪移送装置;40a:第一卡爪移送装置;40b:第二卡爪移送装置;41:支架;42:卡合部件;43:移动件;44:第三驱动装置;50:导向块;51:槽;53:按压部件;55:第四驱动装置;62:卡盘主体;66:支承部件;67:旋转驱动装置;70:加工装置;72:刀具;80:基座;82:构造部件;85:框体;86:门;90:控制装置;100、100a、100b:机床;101a:背面;101b:前面;101c:第一侧面;101d:第二侧面;440:线性驱动装置;440a:固定部;440b:移动部;445:旋转驱动装置;620:锁定解除操作部;as:访问开口;ax:旋转轴;ax1:旋转轴;ax2:旋转轴;c、cn:卡爪;ca:抵接面;cb:基端部;cc:卡合部;cd:凸部;g:操作机构;m:储料器移动机构;m1:第一移动机构;m2:第二移动机构;rm:卡爪收纳室。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。