1.本实用新型涉及自动化装备,具体是一种狭小空间件的弧焊焊接工装。
背景技术:
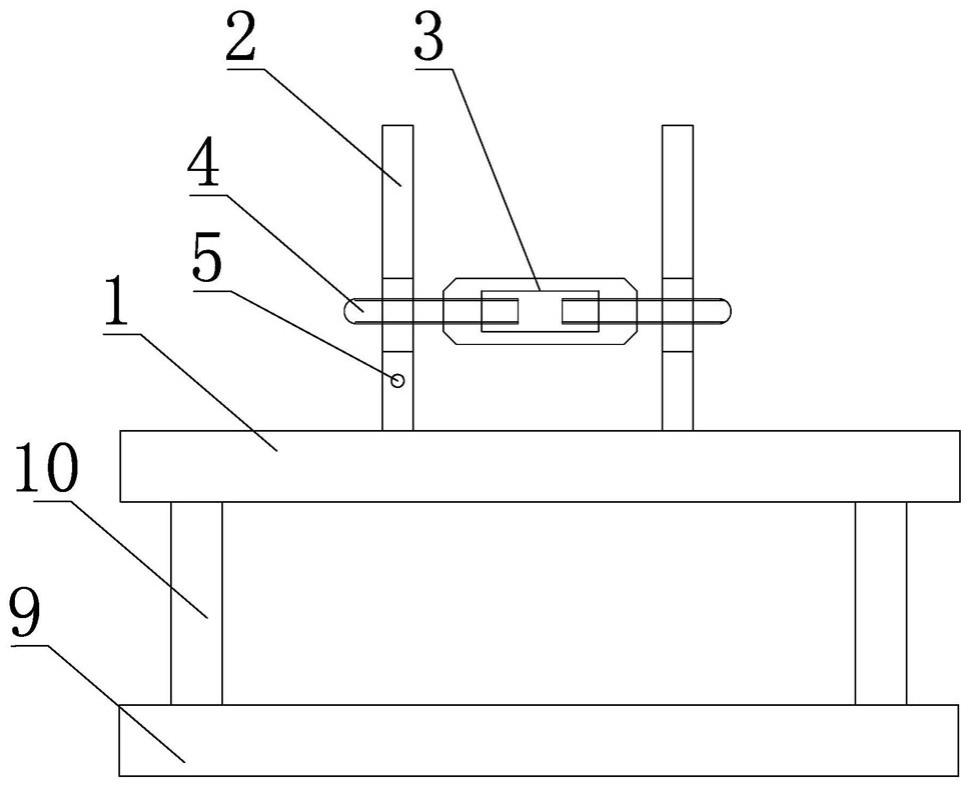
2.类似图1所示的待焊接结构件100,两个边条101间离较窄,在两个边条101之间需焊接若干个圆柱形的连接件102。目前采用人工将组焊所需工件摆放至工装台上,中间圆柱连接件通过相应的支撑工装定位。因空间狭小,且需要正反面焊接,当翻面焊接时,下部的支撑工装与焊枪干涉,需人工拆除支撑定位工装,然后进行焊接,工艺繁琐,效率较低,更无法实现机器人自动焊接。
技术实现要素:
3.为克服现有技术的上述缺陷或缺陷之一,本实用新型提供一种狭小空间件的弧焊焊接工装,所采取的技术方案是:
4.一种狭小空间件的弧焊焊接工装,包括工装底板,所述工装底板两端被支撑、开设与待焊接结构件外廓相应的窗口,对应于所述窗口的所述工装底板的下方设置底架,所述底架包括固定板及与所述固定板固接的多个支脚,所述固定板上均匀固设多个轴向竖直的导套;用于定位连接件的工装活动板的下表面固接多个与多个所述导套一一对应配合的导杆;所述固定板的下表面均匀固设多个顶升气缸的缸体前端,所述顶升气缸的缸杆间隙穿过所述固定板后连接所述工装活动板的下表面。
5.进一步地,所述工装底板上、所述窗口的两侧分别固设多个固定气缸的缸体,两侧的所述固定气缸的缸杆分别抵压待焊接结构件两个边条的外侧面。
6.进一步地,所述工装底板两端被变位机支撑,所述变位机包括基座,所述基座上转设悬臂轴,所述悬臂轴的内端固接夹具,所述夹具能够夹持所述工装底板的一端,其中一个所述基座的外侧固设减速电机,所述减速电机的电机轴固接该基座上的那个悬臂轴的外端。
7.与现有技术相比,本实用新型在摆件时,顶升气缸将工装活动板顶起,零件摆放好后,焊接机器人首先进行正面的焊接,完成后,顶升气缸缩回,工装活动板下降,变位机回转将底面翻转朝上,焊接机器人完成底面的焊接。因工装活动板能够升降下降,避让了足够的空间进行自动化焊接。
附图说明
8.图1是待焊接结构件的结构示意图。
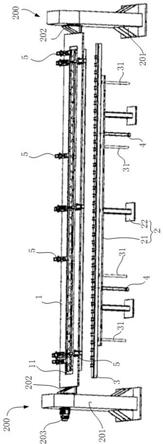
9.图2是本实用新型的结构示意图。
具体实施方式
10.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽
度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
11.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
12.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
13.以下结合附图对本实用新型作进一步详细说明。
14.如图2所示的一种狭小空间件的弧焊焊接工装,包括工装底板1,所述工装底板1两端被变位机200支撑、开设与待焊接结构件100外廓相应的窗口11,对应于所述窗口11的所述工装底板1的下方设置底架2,所述底架2包括固定板21及与所述固定板21固接的3个支脚22,所述固定板21上均匀固设4个轴向竖直的导套;用于定位连接件102的工装活动板3的下表面固接4个与4个所述导套一一对应配合的导杆31;所述固定板21的下表面均匀固设2个顶升气缸4的缸体前端,所述顶升气缸4的缸杆间隙穿过所述固定板21后连接所述工装活动板3的下表面。
15.所述工装底板1上、所述窗口11的两侧分别固设7个和3个共10个固定气缸5的缸体,两侧的所述固定气缸5的缸杆分别抵压待焊接结构件100两个边条101的外侧面。
16.所述变位机200包括基座201,所述基座201上转设悬臂轴,所述悬臂轴的内端固接夹具202,所述夹具202能够夹持所述工装底板1的一端,其中左边的那个所述基座201的外侧固设减速电机203,所述减速电机203的电机轴固接该基座上的那个悬臂轴的外端。
17.多个固定气缸从不同方向及位置夹紧工件,防止焊接过程中变形;工装底板为能够整体翻转的支撑底板,工件及固定气缸等在该工装底板定位;工装活动板做为中间圆柱连接件的支撑工装,通过导杆与固定板连接,由顶升气缸驱动实现升降。
18.作业流程:人工摆件时,顶升气缸将工装活动板顶起,人工摆放零件,焊接机器人首先进行正面的焊接,完成后,顶升气缸缩回,工装活动板下降,变位机回转180
°
将底面翻转朝上,焊接机器人完成底面的焊接。因此时工装活动已下降,避让了足够的空间进行另一面的焊接。
19.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型做任何形式的限制;任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围的情况下,都可利用上述揭示的方法和技术内容对本实用新型的技术方案做出许多可能的变动或修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同替换、等效变化及修饰,均仍属于本实用新型技术方案保护的范围内。
技术特征:
1.一种狭小空间件的弧焊焊接工装,包括工装底板(1),其特征在于,所述工装底板(1)两端被支撑、开设与待焊接结构件(100)外廓相应的窗口(11),对应于所述窗口(11)的所述工装底板(1)的下方设置底架(2),所述底架(2)包括固定板(21)及与所述固定板(21)固接的多个支脚(22),所述固定板(21)上均匀固设多个轴向竖直的导套;用于定位连接件(102)的工装活动板(3)的下表面固接多个与多个所述导套一一对应配合的导杆(31);所述固定板(21)的下表面均匀固设多个顶升气缸(4)的缸体前端,所述顶升气缸(4)的缸杆间隙穿过所述固定板(21)后连接所述工装活动板(3)的下表面。2.根据权利要求1所述的一种狭小空间件的弧焊焊接工装,其特征在于,所述工装底板(1)上、所述窗口(11)的两侧分别固设多个固定气缸(5)的缸体,两侧的所述固定气缸(5)的缸杆分别抵压待焊接结构件(100)两个边条(101)的外侧面。3.根据权利要求1所述的一种狭小空间件的弧焊焊接工装,其特征在于,所述工装底板(1)两端被变位机(200)支撑,所述变位机(200)包括基座(201),所述基座(201)上转设悬臂轴,所述悬臂轴的内端固接夹具(202),所述夹具(202)能够夹持所述工装底板(1)的一端,其中一个所述基座(201)的外侧固设减速电机(203),所述减速电机(203)的电机轴固接该基座上的那个悬臂轴的外端。
技术总结
本实用新型涉及自动化装备,具体是一种狭小空间件的弧焊焊接工装,包括工装底板,所述工装底板两端被支撑、开设与待焊接结构件外廓相应的窗口,对应于所述窗口的所述工装底板的下方设置底架,所述底架包括固定板及与所述固定板固接的多个支脚,所述固定板上均匀固设多个轴向竖直的导套;用于定位连接件的工装活动板的下表面固接多个与多个所述导套一一对应配合的导杆;所述固定板的下表面均匀固设多个顶升气缸的缸体前端,所述顶升气缸的缸杆间隙穿过所述固定板后连接所述工装活动板的下表面。与现有技术相比,本实用新型避让了足够的空间进行自动化焊接。空间进行自动化焊接。空间进行自动化焊接。
技术研发人员:冯晓明 刘泽霖 史大浩 尹臣林 艾虎 李军峰 隋安东 刘明远
受保护的技术使用者:烟台艾迪艾创机器人科技有限公司
技术研发日:2021.07.21
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。