1.本实用新型涉及打磨设备调节技术领域,尤其涉及一种应用于机器人打磨设备的电动机调节系统。
背景技术:
2.随着我国机械制造工业和机器人技术的迅速发展,需要机器人进行的处理越来越多,动作也越来越复杂,利用机器人进行作业不仅大幅度地降低了人力成本,还可以代替人工进行危险作业,例如打磨抛光是机械设备加工的一种常见的处理工作,人工打磨效率低下,因此,机器人打磨设备的应用也越来越广泛。
3.然而由于现有的机器人打磨设备往往采用单片机编程的方式,控制打磨部的位置进行打磨工作,机器人打磨设备主要由安装部、活动的臂部、活动的腕部组成,由于一些特定设备对加工打磨精度要求较高,传统的机器人打磨设备对臂部和腕部的位置信息难以进行实时的确定,在工作的过程中,臂部和腕部位移位置较大,导致打磨部难以精准的移动至预定地点,对打磨部没有很好微调效果,打磨精度较差,难以适用于高精度的加工,为此,我们提出了一种应用于机器人打磨设备的电动机调节系统。
技术实现要素:
4.本实用新型提供了一种应用于机器人打磨设备的电动机调节系统,目的在于此机器人打磨设备的电动机调节系统,可根据臂部和腕部的位置,对打磨部可实现微调功能,提高了打磨精度和准确性,可适用于高精度的加工。
5.为实现上述技术目的,达到上述技术效果,本实用新型是通过以下技术方案实现:
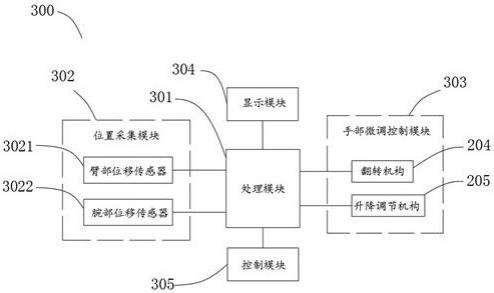
6.一种应用于机器人打磨设备的电动机调节系统,包括坐式底座、安装座、臂部、腕部,所述坐式底座和安装座之间设有第一调节电机,所述安装座和臂部之间设有第二调节电机,所述臂部和腕部之间设有第三调节电机,所述腕部的端部安装有翻转机构,并通过翻转机构连接有手部,所述手部的下方安装有升降调节机构,并通过升降调节机构连接打磨部;
7.还包括电动机调节系统,所述电动机调节系统包括处理模块、位置采集模块和手部微调控制模块,所述处理模块的输入端连接位置采集模块,所述位置采集模块包括臂部位移传感器和腕部位移传感器,所述臂部位移传感器设于臂部中,所述腕部位移传感器设于腕部中,所述处理模块的输出端连接手部微调控制模块,所述手部微调控制模块通过电信号连接升降调节机构和翻转机构。
8.优选地,上述一种应用于机器人打磨设备的电动机调节系统中,还包括控制箱,所述控制箱安装在坐式底座的顶部,所述处理模块设置在控制箱中。
9.基于上述,通过控制箱的设置,以便于使用和很好的防护效果。
10.优选地,上述一种应用于机器人打磨设备的电动机调节系统中,所述处理模块的输出端连接显示模块,所述显示模块显示所述升降调节机构和翻转机构的工作状态。
11.基于上述,通过显示模块的设置,可以实现对升降调节机构和翻转机构的工作状态的查看。
12.优选地,上述一种应用于机器人打磨设备的电动机调节系统中,所述处理模块的输入端连接控制模块,所述控制模块设为按钮开关并安装在控制箱中,用于控制所述升降调节机构和翻转机构。
13.基于上述,通过控制模块的设置,可以实现对升降调节机构和翻转机构启停的控制。
14.优选地,上述一种应用于机器人打磨设备的电动机调节系统中,所述升降调节机构设为气动升降杆,所述翻转机构为翻转电机设置。
15.基于上述,手部微调控制模块可实现对升降调节机构和翻转机构的控制工作,及对腕部微调工作的翻转与升降操作。
16.优选地,上述一种应用于机器人打磨设备的电动机调节系统中,所述升降调节机构和翻转机构之间为垂直设置。
17.基于上述,升降调节机构和翻转机构可实现对手部的旋转和打磨部位置上下的调节工作,提高了对打磨部的调节效果,有利于精准的打磨工作。
18.本实用新型的有益效果是:本实用新型的机器人打磨设备的电动机调节系统,可根据臂部和腕部的位置,对打磨部可实现微调功能,可以实现对手部的旋转和打磨部位置上下的调节工作,灵活度高,提高了打磨精度和准确性,可适用于高精度的加工;同时处理模块通过与控制模块和显示模块的设置,可实现对升降调节机构和翻转机构的工作状态的查看、以及实时控制,具有很好的观察和控制效果,有利于人们的使用。
附图说明
19.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本实用新型所述机器人打磨设备的结构示意图;
21.图2为本实用新型所述机器人打磨设备的正视图;
22.图3为本实用新型所述电动机调节系统的模块化结构图。
23.图中标号:100、坐式底座;101、安装座;102、臂部;103、腕部;104、手部;105、打磨部;201、第一调节电机;202、第二调节电机;203、第三调节电机;204、翻转机构;205、升降调节机构;300、电动机调节系统;301、处理模块;302、位置采集模块;3021、臂部位移传感器;3022、腕部位移传感器;303、手部微调控制模块;304、显示模块;305、控制模块;306、控制箱。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下
所获得的所有其它实施例,都属于本实用新型保护的范围。
25.请参阅图1、2所示,本实施例为一种应用于机器人打磨设备的电动机调节系统,包括坐式底座100、安装座101、臂部102、腕部103,坐式底座100和安装座101之间设有第一调节电机201,安装座101和臂部102之间设有第二调节电机202,臂部102和腕部103之间设有第三调节电机203,腕部103的端部安装有翻转机构204,并通过翻转机构204连接有手部104,手部104的下方安装有升降调节机构205,并通过升降调节机构205连接打磨部105。
26.具体的,升降调节机构205设为气动升降杆,翻转机构204为翻转电机设置,手部微调控制模块303可实现对升降调节机构205和翻转机构204的控制工作,及对腕部103微调工作的翻转与升降操作。同时,升降调节机构205和翻转机构204之间为垂直设置,升降调节机构205和翻转机构204可实现对手部104的旋转和打磨部105位置上下的调节工作,提高了对打磨部105的调节效果,有利于精准的打磨工作。
27.请参阅图3所示,还包括电动机调节系统300,电动机调节系统300包括处理模块301、位置采集模块302和手部微调控制模块303,处理模块301的输入端连接位置采集模块302,位置采集模块302包括臂部位移传感器3021和腕部位移传感器3022,臂部位移传感器3021设于臂部102中,腕部位移传感器3022设于腕部103中,处理模块301的输出端连接手部微调控制模块303,手部微调控制模块303通过电信号连接升降调节机构205和翻转机构204。
28.其中位置采集模块302中的臂部位移传感器3021和腕部位移传感器3022可实时的采集获取该臂部102、腕部103的位置信息,并传输至电动机调节系统300中的处理模块301中,通过处理模块301的处理,可以控制手部微调控制模块303,及对应的控制位于手部104上升降调节机构205和翻转机构204的工作,进而可以实现对打磨部105的微调工作,可使得打磨部105精准的移动至预定地点进行打磨操作。
29.综上所述,此电动机调节系统中的手部微调控制模块303结构设置合理,可以实现对手部104的旋转和打磨部105位置上下的调节工作,提高了对打磨部105的调节效果,灵活度高,提高了打磨精度和准确性,可适用于高精度的加工。
30.进一步的,如参阅图1、3所示,本实施例还包括控制箱306,控制箱306安装在坐式底座100的顶部,处理模块301设置在控制箱306中,通过控制箱306的设置,以便于使用和很好的防护效果。
31.较佳的,处理模块301的输出端连接显示模块304,显示模块304为显示屏设置,并设于控制箱306中,可显示升降调节机构205和翻转机构204的工作状态,通过显示模块304的设置,可以实现对升降调节机构205和翻转机构204的工作状态的查看。
32.较佳的,处理模块301的输入端连接控制模块305,控制模块305设为按钮开关并安装在控制箱306中,用于控制升降调节机构205和翻转机构204,通过控制模块305的设置,可以实现对升降调节机构205和翻转机构204启停的控制。
33.基于上述,处理模块301通过与控制模块305和显示模块304的设置,可实现对升降调节机构205和翻转机构204的工作状态的查看、以及实时控制,提高了功能性,具有很好的观察和控制效果,有利于人们的使用。
34.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个
实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
35.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。