1.本发明属于焊接加工技术领域,具体涉及的是一种焊接检测装置及自动焊接机。
背景技术:
2.自动焊机是建立在电动机控制技术、单片机控制技术、plc控制技术及数控制技术等基础上的一种自动焊接机器,也称为熔接,生活当中我们使用的汽车零部件、建筑行业等都需要焊接零部件,现有的焊接机大都是单一的一次焊接一个,而且没有焊接检测装置进行检测,都依附于人工检查,不仅效率不高,而且只依附于人工检测,焊接完成的零部件准确率和精度都不会太高,固定需要焊接的零部件定位焊盘也都是固定不变的,在针对焊接不同的零部件也有一定的局限,结合实际生产中存在的问题,因此研发一种焊接检测装置及自动焊接机,达到具有能够具有焊接检测功能,焊接盘灵活调整,并且一次可以加工两组零件。
技术实现要素:
3.本发明要解决的技术问题是现有的焊接机大都是单一的一次焊接一个,而且没有焊接检测装置进行检测,都依附于人工检查,不仅效率不高,而且只依附于人工检测,焊接完成的零部件准确率和精度都不会太高,固定需要焊接的零部件定位焊盘也都是固定不变的,在针对焊接不同的零部件也有一定的局限,为解决上述问题,本发明提供一种焊接检测装置及自动焊接机。
4.本发明的目的是以下述方式实现的:一种焊接检测装置及自动焊接机,包括底部固定板,所述底部固定板顶部一端设置第四导轨组件,第四导轨组件顶部连接第一焊接盘,第四导轨组件一端设置右侧连接块,右侧连接块一端连接第一电机,底部固定板顶部另一端设置第五导轨组件,第五导轨组件连接第二焊接盘,第五导轨组件靠近右侧连接块一端连设置左侧连接块,左侧连接块靠近第一电机一侧连接有第二电机,底部固定板顶部设置控制面板,底部固定板一侧设置第一侧面安装板,底部固定板另一侧设置第二侧面安装板,第一侧面安装板一端连接第一检测装置,第二侧面安装板靠近第一检测装置一端连接第二检测装置,第一焊接盘和第二焊接盘上方设置自动焊接机。
5.所述自动焊接机包括第一导轨组件、第二导轨组件、液压气缸、第三导轨组件、液压组件、焊接条和焊接组件固定座,底部固定板顶部一端设置第一导轨组件,底部固定板顶部另一端设置第三导轨组件,第二侧面安装板和第一侧面安装板之间设置第二导轨组件,第二导轨组件端部分别连接第一导轨组件和第三导轨组件,第二导轨组件上连接焊接组件固定座一侧,焊接组件固定座另一侧连接焊接条,焊接条顶部一端连接液压气缸,焊接条顶部一端连接液压组件。
6.所述第二导轨组件滑动连接焊接组件固定座。
7.相对于现有技术,本发明第一侧面安装板一端连接第一检测装置,第二侧面安装板靠近第一检测装置一端连接第二检测装置,利用第一检测装置和第二检测装置进行该设
备在实际生产中的焊接检测,解决了现有技术中依附于人工检查,不仅效率不高,而且只依附于人工检测,焊接完成的零部件准确率和精度都不会太高的问题,本设计设有两组焊接盘,第一焊接盘和第二焊接盘配合切换,当第一组焊接盘上面零件焊接完成后可以自动切换第二组进行焊接,效率高效,配合后端设备使用,当焊接机在焊接第二组零件时,后端设备自动进行第一组零件拿取并且放置新的待焊接零件,解决了现有的焊接机大都是单一的一次焊接一个,效率不高的问题,焊接部件通过液压方式进行动作,配合导轨实现多角度动作,解决了现有技术中固定需要焊接的零部件定位焊盘也都是固定不变的,在针对焊接不同的零部件也有一定的局限的问题。
附图说明
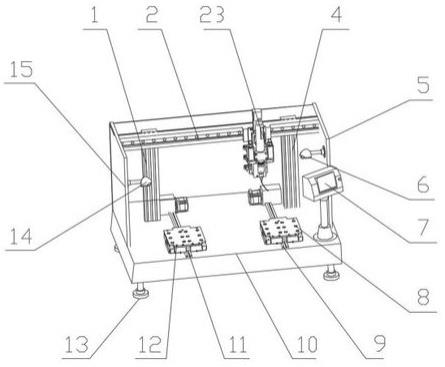
8.图1是一种焊接检测装置及自动焊接机示意图。
9.图2是一种焊接检测装置及自动焊接机侧面安装板去除后的结构示意视图。
10.图3是一种焊接检测装置及自动焊接机的自动焊接机部分放大图。
11.其中,1.第一导轨组件、2、第二导轨组件、3.液压气缸、4.第三导轨组件、5.第一侧面安装板、6.第一检测装置、7.控制面板、8.第一焊接盘、9.第四导轨组件、10.底部固定板、11.第五导轨组件、12.第二焊接盘、13.底托、14.第二检测装置、15.第二侧面安装板、16.左侧连接块、17.第二电机、18.第一电机、19.右侧连接块、20.液压组件、21.焊接条、22.焊接组件固定座、23.自动焊接机。
具体实施方式
12.下面结合附图和具体实施方式对本发明作进一步详细说明实施例1:如附图1到附图3所示的一种焊接检测装置及自动焊接机,包括底部固定板10,所述底部固定板10顶部一端设置第四导轨组件9,第四导轨组件9顶部连接第一焊接盘8,第四导轨组件9一端设置右侧连接块19,右侧连接块19一端连接第一电机18,底部固定板10顶部另一端设置第五导轨组件11,第五导轨组件11连接第二焊接盘12,第一焊接盘8通过第四导轨组件9前后滑动,第二焊接盘12通过第五导轨组件11前后滑动,第一焊接盘8的形状、大小和第二焊接盘12的形状、大小相同,第五导轨组件11靠近右侧连接块19一端连设置左侧连接块16,左侧连接块16靠近第一电机18一侧连接有第二电机17,右侧连接块19、第一电机18和第一焊接盘8组成单轴机器人,左侧连接块16、第二电机17和第二焊接盘12组成单轴机器人,底部固定板10顶部设置控制面板7,底部固定板10一侧设置第一侧面安装板5,底部固定板10另一侧设置第二侧面安装板15,第一侧面安装板5一端连接第一检测装置6,第二侧面安装板15靠近第一检测装置6一端连接第二检测装置14,第一焊接盘8和第二焊接盘12上方设置自动焊接机23。
13.所述自动焊接机23包括第一导轨组件1、第二导轨组件2、液压气缸3、第三导轨组件4、液压组件20、焊接条21和焊接组件固定座22,底部固定板10顶部一端设置第一导轨组件1,底部固定板10顶部另一端设置第三导轨组件4,第二侧面安装板15和第一侧面安装板5之间设置第二导轨组件2,第二导轨组件2端部分别连接第一导轨组件1和第三导轨组件4,第二导轨组件2上连接焊接组件固定座22一侧,焊接组件固定座22另一侧连接焊接条21,焊
接条21顶部一端连接液压气缸3,焊接条21顶部一端连接液压组件20,液压气缸3带动焊接条21上下运动,液压气缸3通过液压组件20动作。
14.所述第二导轨组件2滑动连接焊接组件固定座22,焊接组件固定座22以及与焊接组件固定座22固定的结构都通过第二导轨组件2左右滑动,焊接组件固定座22在第二导轨组件2通过人工或者外接电机进行滑动。
15.本发明的工作过程如下:将需要焊接的零件固定在第一焊接盘8和第二焊接盘12上,此时通过控制面板7设置需要焊接的参数,调整焊接条21与零件需要焊接的部位,设置完成后启动设备,通过第一电机18运行带动右侧连接块19动作,右侧连接块19带动第一焊接盘8动作,此时第一焊接盘8通过第四导轨组件9带着零件向后滑动至液压气缸3的底部,液压气缸3通过液压组件20带动焊接条21向下,与零件相接触开始焊接,焊接完成后通过第一电机18运动,驱动第四导轨组件9带动第一焊接盘8向前送出,此时通过第一检测装置6对零件焊接进行检测,当合格时,给后端设备输出信号,此时零件通过后端设备取出上新,焊接组件固定座22通过第二导轨组件2向左滑动,第二焊接盘12带动第二块零件向后滑动,到达液压气缸3底部时,通过液压组件20给液压气缸3提供动力,带动焊接条21进行焊接作业,焊接完成后液压气缸3回位,此时第二焊接盘12通过第五导轨组件11向前伸出,经过第二检测装置14进行检测,检测合格后通过后端设备动作,回位至第四导轨组件9顶部初始位置进行下次动作,当检测不合格时,设备停止运行,同时输出信号提醒工作人员,待工作人员进行二次确认,下达下一指令即完成设备动作。
16.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明整体构思前提下,还可以作出若干改变和改进,这些也应该视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

