1.本实用新型涉及教学教具技术领域,特别是涉及一种音乐教学机器人。
背景技术:
2.目前市场上所谓的音乐机器人大多数是在仿人形机器人内部嵌入音乐播放器,将预先存储在存储介质的曲目进行播放,与普通播放器的功能相差不大,在音乐教育过程中仅仅起到辅助作用。
技术实现要素:
3.本实用新型的目的是提供一种音乐教学机器人,实现对音乐机理、物理现象及机器人科学的探索。
4.为实现上述目的,本实用新型提供了如下方案:
5.一种音乐教学机器人,包括控制单元、敲击部以及器皿部;
6.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒;
7.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
8.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片;
9.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
10.一种音乐教学机器人,包括控制单元、敲击部以及器皿部;
11.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器;
12.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
13.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片和显示屏系统;
14.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿;
15.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述显示屏系统显示所述声音信息。
16.一种音乐教学机器人,包括控制单元、敲击部以及器皿部;
17.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器;
18.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
19.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片和音响系统;
20.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿;
21.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息。
22.一种音乐教学机器人,包括控制单元、敲击部以及器皿部;
23.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器;
24.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
25.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片、显示屏系统和音响系统;
26.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿;
27.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息和控制所述显示屏系统显示所述声音信息。
28.一种音乐教学机器人,包括控制单元、敲击部、器皿部以及视觉识别系统;
29.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒;
30.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
31.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息;
32.所述控制单元包括控制器;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
33.一种音乐教学机器人,包括控制单元、敲击部、器皿部以及视觉识别系统;
34.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器;
35.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
36.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息;
37.所述控制单元包括控制器以及与所述控制器连接的显示屏系统;所述控制器用于
基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿;
38.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述显示屏系统显示所述声音信息。
39.一种音乐教学机器人,包括控制单元、敲击部、器皿部以及视觉识别系统;
40.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器;
41.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
42.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息;
43.所述控制单元包括控制器以及与所述控制器连接的音响系统;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿;
44.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息。
45.一种音乐教学机器人,包括控制单元、敲击部、器皿部以及视觉识别系统;
46.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器;
47.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体;
48.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息;
49.所述控制单元包括控制器以及与所述控制器连接的音响系统和显示屏系统;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿;
50.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息和控制所述显示屏系统显示所述声音信息。
51.可选的,所述控制单元包括与所述控制器连接的语音识别芯片;
52.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
53.可选的,所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机
用于控制所述传送带工作以使所述六轴机械臂往返运动。
54.根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:
55.本实用新型利用六轴机械臂敲击盛有不同量液体的器皿发出不同的音符来做音乐的音源,在教学中非常适用,既可以让学生了解音乐的发声机理,也可以让学生了解机器人的相关知识。
附图说明
56.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
57.图1为本实用新型实施例一音乐教学机器人结构框图;
58.图2为本实用新型实施例二音乐教学机器人结构框图;
59.图3为本实用新型实施例三音乐教学机器人结构框图;
60.图4为本实用新型实施例四音乐教学机器人结构框图;
61.图5为本实用新型实施例五音乐教学机器人结构框图;
62.图6为本实用新型实施例六音乐教学机器人结构框图;
63.图7为本实用新型实施例七音乐教学机器人结构框图;
64.图8为本实用新型实施例八音乐教学机器人结构框图;
65.图9为本实用新型实施例九音乐教学机器人结构示意图;
66.图10为本实用新型实施例九音乐教学机器人通信示意图;
67.图11为本实用新型实施例九六轴机械臂敲击器皿获取音符流程图;
68.图12为本实用新型实施例九视觉识别系统读取音符流程图。
具体实施方式
69.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
70.本实用新型的目的是提供一种音乐教学机器人,实现对音乐机理、物理现象及机器人科学的探索。
71.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
72.实施例一
73.如图1所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部以及器皿部。
74.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒。
75.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
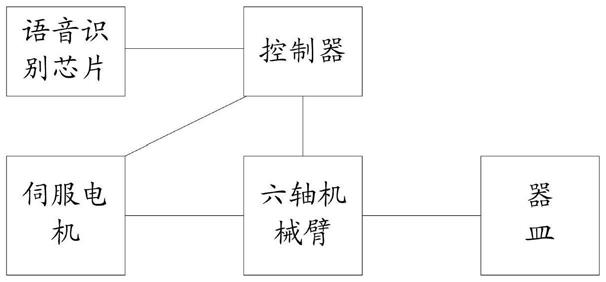
76.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片。
77.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
78.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。其中,语音识别技术以及基于用户指令输出控制指令均为现有技术。
79.实施例二
80.如图2所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部以及器皿部。
81.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器。
82.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
83.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片和显示屏系统。
84.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述显示屏系统显示所述声音信息。其中,语音识别技术、声音识别技术以及基于用户指令输出控制指令均为现有技术。
85.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
86.实施例三
87.如图3所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部以及器皿部。
88.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器。
89.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
90.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片和音响系统。
91.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
92.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息。其中,语音识别技术、声音识别技术以及基于用户指令输出控制指令均为现有技术。
93.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
94.实施例四
95.如图4所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部以及器皿部。
96.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器。
97.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
98.所述控制单元包括控制器以及与所述控制器连接的语音识别芯片、显示屏系统和音响系统。
99.所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
100.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息和控制所述显示屏系统显示所述声音信息。其中,语音识别技术、声音识别技术以及基于用户指令输出控制指令均为现有技术。
101.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
102.实施例五
103.如图5所示,本实施例提供的一种音乐教学机器人,包括包括控制单元、敲击部、器皿部以及视觉识别系统。
104.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒。
105.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
106.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息。
107.所述控制单元包括控制器;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。其中,视觉识别技术以及基于视觉信息输出控制指令均为现有技术。
108.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
109.实施例六
110.如图6所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部、器皿部以及视觉识别系统。
111.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器。
112.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
113.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息。
114.所述控制单元包括控制器以及与所述控制器连接的显示屏系统;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
115.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述显示屏系统显示所述声音信息。其中,视觉识别技术、声音识别技术以及基于视觉信息输出控制指令均为现有技术。
116.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
117.实施例七
118.如图7所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部、器皿部以及视觉识别系统。
119.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器。
120.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
121.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息。
122.所述控制单元包括控制器以及与所述控制器连接的音响系统;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
123.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息。其中,视觉识别技术、声音识别技术以及基于视觉信息输出控制指令均为现有技术。
124.所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
125.实施例八
126.如图8所示,本实施例提供的一种音乐教学机器人,包括控制单元、敲击部、器皿部
以及视觉识别系统。
127.所述敲击部包括传动机构、安装在所述传动机构上的六轴机械臂以及控制所述传动机构工作的伺服电机;其中,所述六轴机械臂的末端上设有敲击棒和声音传感器。
128.所述器皿部包括多个器皿,且每个所述器皿内存储有不同的液体。
129.所述视觉识别系统包括乐谱台、支撑架、安装在所述支撑架上的摄像头以及与所述摄像头连接的图像识别芯片;所述摄像头用于拍摄所述乐谱台上的乐谱以获取乐谱图像;所述图像识别芯片用于识别所述乐谱图像中的乐谱信息。
130.所述控制单元包括控制器以及与所述控制器连接的音响系统和显示屏系统;所述控制器用于基于所述图像识别芯片识别的乐谱信息控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述图像识别芯片识别的乐谱信息控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
131.所述声音传感器与所述控制器连接,所述声音传感器用于获取所述敲击棒击打所述器皿时的声音信息;所述控制器用于控制所述音响系统播放所述声音信息和控制所述显示屏系统显示所述声音信息。
132.优选的,所述控制单元包括与所述控制器连接的语音识别芯片;所述语音识别芯片用于获取用户指令;所述控制器用于基于所述语音识别芯片获取的用户指令控制所述伺服电机工作以使所述六轴机械臂到达指定位置,所述控制器还用于基于所述语音识别芯片获取的用户指令控制所述六轴机械臂工作以使所述敲击棒击打指定的所述器皿。
133.优选的,所述传动机构包括两条导轨以及设置在所述导轨中间的传送带;所述六轴机械臂放置在所述传送带上且所述六轴机械臂底部的两端安装在导轨上;所述伺服电机用于控制所述传送带工作以使所述六轴机械臂往返运动。
134.其中,语音识别技术、视觉识别技术、声音识别技术以及基于视觉信息输出控制指令均为现有技术。
135.本实施例提供了一种音乐教学机器人,该音乐教学机器人可以通过敲击不同器皿发声,通过声音传感器,能够自动提取音符,并把音符在显示屏系统上显示,在音响系统上自动播放;同时该音乐教学机器人利用视觉识别系统可以自动识别音符,并把音符在显示屏系统上显示,在音响系统上自动播放。在播放音乐的过程中,六轴机械臂能够按照预先设定的程序进行有节奏的摆动。
136.实施例九
137.如图9所示,本实施例提供的音乐教学机器人包括:视觉识别系统、控制面板7、机器人系统和器皿系统。
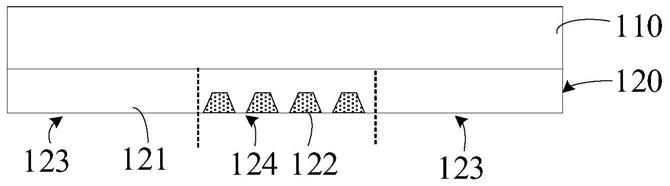
138.机器人系统包括六轴机械臂1、机器人导轨2、伺服电机3、传送带4等。六轴机械臂1固定在机器人导轨2上,可以通过伺服电机3和传送带4来回运行。六轴机械臂1的末端设有敲击器皿5的敲击棒6及采集音符的声音传感器,当敲击棒6敲击器皿5时,会发出相应的音符,声音传感器会及时接收音符并处理(放大、过滤杂音),传送到控制面板7上。
139.器皿系统包括器皿台8以及放置在器皿台8上的各个器皿5。各个器皿5 倒入不同类型不同量的液体,伺服电机3根据系统指令带动传送带进而带动六轴机械臂1往返运行,进行有规律的敲击不同的器皿,即各个器皿5倒入不同液体,以便让六轴机械臂1敲击器皿5时发出的音符有高有低,形成音律传送到控制面板7中。
140.视觉识别系统包括摄像头9、乐谱摆放台10、升降立柱11。摄像头9主要是读取摆放在乐谱摆放台10上的乐谱内的音符,通过对音符的自动识别,让音乐教学机器人自动播放相应的音律。其中,升降立柱11可以调节摄像头 9的高度。
141.控制面板7上主要有音响系统12、显示屏13、电源控制系统、音乐机器人通信系统、机器人控制系统以及视觉控制系统。控制面板7内置控制器,控制器通过总线形式与机器人控制系统和视觉控制系统进行通信,进而控制各个部件的运行。
142.如图10
‑
12所示,控制面板7上的显示屏13即可以显示视觉识别系统读取的音符也可以显示声音传感器处理后传回来的音符;音响系统可以播放视觉识别系统读取的音符也可以播放声音传感器处理后传回来的音符机器人控制系统可以通过控制器输出的控制指令控制六轴机械臂1进行往返运动。六轴机械臂1的敲击运动则是通过示教程序或者离线程序给定。电源控制系统不仅提供220v交流电也能提供24v、12v和5v的直流电,从而对音乐教学机器人进行供电。
143.本实用新型主要有以下几个方面:
144.1.音乐教学机器人通过敲击器皿发声获取音符,该音乐教学机器人不但能够提高青少年学习音乐的兴趣也可以激发学生对音乐机理、物理现象及机器人科学的探索。
145.2.六轴机械臂固定在导轨是往返运动,大大提升音乐机器人的运动空间。
146.3.将声音传感器内置于六轴机械臂的末端敲击部分,有效提升敲击所产生音符的音质。
147.4.视觉识别系统读取音符并通过显示屏显示、通过音响系统播放音律。
148.5.视觉识别系统与机器人控制系统的融合构成音乐教学机器人的创新实践。
149.现有的音乐机器人在结构上属于整体型,功能单一,辅助教学功能较弱,主要用来展示。本实用新型提出的音乐教学机器人在结构上进行分解,机器人控制系统和视觉识别系统可以单独使用,也可以融合为一体。在单独使用时,机器人控制系统可以利用现有的人工智能技术与用户进行语音交流,识别用户的指令和需求,六轴机械臂配合做相应的动作。六轴机械臂末端敲击器皿发出的声音可以传送到音响系统和显示屏,在显示屏上可以显示:1、2、3、4、5、 6、7等7个基本音级。
150.另外,本实用新型的发音利用机械臂敲击盛有不同量的液体的器皿发出不同的音符来做音乐的音源,在教学中非常适用,既可以让学生了解音乐的发声机理也可以让学生了解机器人的相关知识。
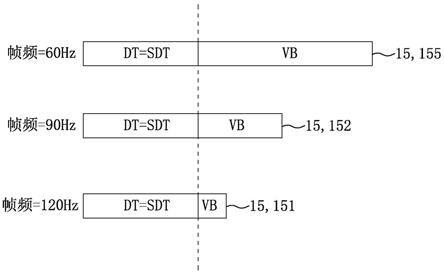
151.视觉识别系统可以读取音乐的简谱,读取的简谱可以在显示屏上显示,也可以在音响系统中播放。视觉识别系统与机器人控制系统可以融合,在音响系统播放视觉识别系统读取的音乐简谱之前,预先输入机器人控制程序,可以控制机器人做相应的动作,即机器人跟着音乐“起舞”,这是现有技术所没有做到的。
152.本实用新型不仅有音乐播放的功能,还可以通过声音传感器自动提取音符,并把音符读出来,起到音乐教学的目的;同时可以通过视觉识别系统识别音符,自动根据音符谱成曲子,另外,对中小学生而言,既能够通过机器人学习音乐知识,也能够激发对机器人的兴趣。
153.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
154.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。