本发明涉及卵圆钳技术领域,特别是涉及一种可调双头卵圆钳及其在人体模型上的使用方法。
背景技术
卵圆钳作为一种非常基础的医疗器械,广泛应用在各种手术操作中,用于进行组织或器官的夹持、牵拉。但是,目前,临床上普遍使用的卵圆钳只有一个钳嘴(单头),无法同时进行多个组织或器官的夹持。当遇到组织较为肥厚,或组织断面不齐,或需要同时夹持多个部位组织才方便于牵拉时就会遇到困难。尤其是,在近几年出现的腹腔镜经自然腔道取标本手术(NOSES)中,因手术标本切除后需要经自然腔道(直肠或阴道)取出,由于自然腔道的内径有限,需要手术标本较小,或理顺后才容易取出。但是,由于切除的标本往往断面不齐,应用目前的(单头)卵圆钳,因其只有一个钳嘴,只能夹持标本的一个断面,在牵拉时夹持力度较小,且容易导致未夹持的组织挤压成团,导致标本取出困难,或无法取出,甚至撕裂直肠或阴道,增加手术的风险,因此,有必要设计一种卵圆钳,并通过在人体模型上进行手术试验及教学来降低手术风险,以及通过手术模拟操作来提高手术的成功率。
技术实现要素:
针对上述问题,本发明提供了一种可调双头卵圆钳及其在人体模型上的使用方法,可以同时夹持人体模型的组织或器官的两个部位,具有夹持距离可调,夹持更高效,牵拉力度更大,且可理顺组织,更有利于模拟腹腔镜NOSES手术中标本经自然腔道取出等优点。
本发明的技术方案是:
一种可调双头卵圆钳及其在人体模型上的使用方法,包括卵圆钳本体,所述卵圆钳本体由第一钳臂、设置在第一钳臂上的第一钳嘴、手柄、设置在手柄上的指圈和设置在第一钳臂和手柄之间的铰接螺栓组成,所述第一钳臂上沿其长度方向设有互相平行的固定板,所述固定板之间具有间隙,所述固定板之间设有第二钳臂,所述第二钳臂上设有第二钳嘴,所述固定板上设有用于固定第二钳臂的固定扣,所述固定板的侧壁上均匀分布有第一通孔,所述固定扣上设有固定螺栓,所述第二钳臂上设有与所述第一通孔大小相等的第二通孔。
上述技术方案的工作原理如下:
在进入腹腔内时,首先将第二钳臂伸入到固定板之间,调整到合适的位置之后,放置上固定扣,将固定扣上的固定螺栓取出,然后使得第二钳臂上的第二通孔与固定板上的第一通孔对齐,接着,穿入固定螺栓,将第二钳臂固定在固定板上,防止脱落,在手术过程中,则可以通过第一钳嘴和第二钳嘴将同组织的不同部位理顺,方便将其牵拉出来。
在进一步的技术方案中,所述第二钳嘴到第一钳臂的距离小于第一钳嘴到第一钳臂之间的距离。
第二钳嘴到第一钳臂的距离小于第一钳嘴到第一钳臂之间的距离是防止在手术时进入人体模型的自然腔道(直肠或阴道)和将组织或器官牵拉出经过自然腔道(直肠或阴道)时,对人体模型的肠壁或阴道壁造成损伤。
在进一步的技术方案中,所述第一钳嘴和第二钳嘴的夹持面上均设有防滑齿。
通过设置防滑细齿用于在夹持组织或器官时,增大接触面的摩擦力,防止卵圆钳夹持时发生打滑。
在进一步的技术方案中,所述第一钳臂与第一钳嘴的连接部之间为弧型或直线型,第二钳嘴与第二钳臂的连接部为弧型,且连接部为弧型的弧度为0~15°。
通过将钳臂和钳嘴之间的连接部设置为弧型或直线型用以改变钳嘴的夹持方向,便于操作人员在实际使用过程中更加方便、更顺手;尤其是在操作空间受到限制的地方,可以顺着体腔的方向伸入或牵出,以便于更顺利的完成操作。
在进一步的技术方案中,所述第一钳嘴和第二钳嘴的中心点之间的距离为5~10cm。
通过将第一钳嘴和第二钳嘴的距离设置为可调的5~10cm,可以根据组织或器官不同断面间的距离进行相应的调整以便于更好地牵拉。
在进一步的技术方案中,所述手柄上设有限位装置。
通过设置限位装置用于防止钳嘴的夹持力过大。
在进一步的技术方案中,所述固定扣上设有若干圆角。
通过设置圆角用于防止在人体模型的体腔中对体腔壁造成损伤。
另一方面,本发明还提供了一种用于可调双头卵圆钳的使用方法,包括以下步骤:
S1、将所述可调双头卵圆钳伸入模拟人体结构的人体模型的腔道中模拟实际的腔镜手术时后,取下可调双头卵圆钳上的固定螺栓,然后,在两个固定板之间,根据实际需要调整第二钳臂的位置,在第二钳臂上的第二钳嘴达到合适的夹持位置后,放置上固定扣,并使得第一通孔和第二通孔对齐;
S2、将固定螺栓从第一通孔穿入,经过第二通孔来固定住第二钳嘴,再装上保护帽;
S3、在人体模型的腔道内模拟实际手术时,将可调双头卵圆钳上的第一钳嘴和第二钳嘴同时夹持在人体模型内模拟的组织或器官上,将该模拟的组织或器官牵拉出所述腔道。
另一方面,本发明还提供了一种用于可调双头卵圆钳的使用方法,包括以下步骤:
在步骤S1中,将第二钳嘴到第一钳臂的距离设置为小于第一钳嘴到第一钳臂之间的距离,防止对人体模型中腔道的腔壁造成损伤,第一钳嘴和第二钳嘴的夹持面上均设有防滑齿,且第一钳嘴和第二钳嘴的中心点之间的距离为可调的5~10cm。
另一方面,本发明还提供了一种用于可调双头卵圆钳的使用方法,包括以下步骤:
在步骤S2中,手柄上设有用于防止钳嘴夹持力过大的限位装置,固定板上的固定扣设置为圆角。
本发明的有益效果是:
1、能够将人体模型的腔道中的同组织的不同部位一起夹持牵拉,有效降低了组织理顺牵拉的时间,能够根据不同组织的情况进行钳嘴的相应调整来进行夹持;
2、第二钳嘴到第一钳臂的距离小于第一钳嘴到第一钳臂之间的距离是防止在手术时进入人体模型的自然腔道(直肠或阴道)和将组织或器官牵拉出经过自然腔道(直肠或阴道)时,对人体模型的肠壁或阴道壁造成损伤;
3、通过设置防滑细齿用于在夹持组织或器官时,增大接触面的摩擦力,防止卵圆钳夹持时发生打滑;
4、通过将钳臂和钳嘴之间的连接部设置为弧型或直线型用以改变钳嘴的夹持方向,便于操作人员在实际使用过程中更加方便、更顺手;尤其是在操作空间受到限制的地方,可以顺着体腔的方向伸入或牵出,以便于更顺利的完成操作;
5、通过将第一钳嘴和第二钳嘴的距离设置为可调的5~10cm,可以根据组织或器官不同断面间的距离进行相应的调整以便于更好的将其牵拉出;
6、通过设置限位装置用于防止钳嘴的夹持力过大;
7、通过设置圆角用于防止在人体模型的体腔中对体腔壁造成损伤。
附图说明
图1是本发明实施例所述一种可调双头卵圆钳及其在人体模型上的使用方法的俯视图;
图2是本发明实施例所述一种可调双头卵圆钳及其在人体模型上的使用方法的结构示意图一;
图3是本发明实施例所述一种可调双头卵圆钳及其在人体模型上的使用方法的固定螺栓的结构示意图二。
附图标记说明:
1、第一钳嘴;2、第二钳嘴;3、第一钳臂;4、第二钳臂;5、手柄;6、指圈;7、铰接螺栓;8、限位装置;9、固定扣;10、固定板;11、第一通孔;12、第二通孔;13、固定螺栓。
具体实施方式
下面结合附图对本发明的实施例作进一步说明。
实施例:
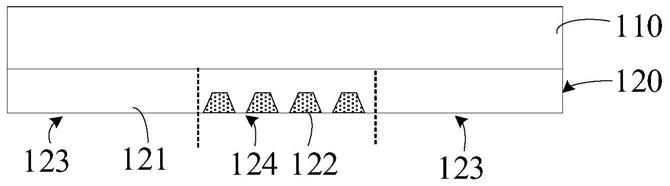
如图1-3所示,一种可调双头卵圆钳及其在人体模型上的使用方法,包括卵圆钳本体,所述卵圆钳本体由第一钳臂3、设置在第一钳臂3上的第一钳嘴1、手柄5、设置在手柄5上的指圈6和设置在第一钳臂3和手柄5之间的铰接螺栓7组成,所述第一钳臂3上沿其长度方向设有互相平行的固定板10,所述固定板10之间具有间隙,所述固定板10之间设有第二钳臂4,所述第二钳臂4上设有第二钳嘴2,所述固定板10上设有用于固定第二钳臂4的固定扣9,所述固定板10的侧壁上均匀分布有第一通孔11,所述固定扣9上设有固定螺栓13,所述第二钳臂4上设有与所述第一通孔11大小相等的第二通孔12。
上述技术方案的工作原理如下:
在进入腹腔内时,首先将第二钳臂4伸入到固定板10之间,调整到合适的位置之后,放置上固定扣9,将固定扣9上的固定螺栓13取出,然后使得第二钳臂4上的第二通孔12与固定板10上的第一通孔11对齐,接着,穿入固定螺栓13,将第二钳臂4固定在固定板10上,防止脱落,在手术过程中,则可以通过第一钳嘴1和第二钳嘴2将同组织的不同部位理顺,方便将其牵拉出来。
在另一个实施例中,如图2所示,所述第二钳嘴2到第一钳臂3的距离小于第一钳嘴1到第一钳臂3之间的距离。
第二钳嘴2到第一钳臂3的距离小于第一钳嘴1到第一钳臂3之间的距离是防止在手术时进入人体模型的自然腔道(直肠或阴道)和将组织或器官牵拉出经过自然腔道(直肠或阴道)时,对人体模型的肠壁或阴道壁造成损伤。
在另一个实施例中,如图2所示,所述第一钳嘴1和第二钳嘴2的夹持面上均设有防滑齿15。
通过设置防滑细齿用于在夹持组织或器官时,增大接触面的摩擦力,防止卵圆钳夹持时发生打滑。
在另一个实施例中,如图2所示,所述第一钳臂3与第一钳嘴1的连接部之间为弧型或直线型,所述第二钳嘴2与第二钳臂4的连接部为弧型,且连接部为弧型的弧度为0~15°。
通过将钳臂和钳嘴之间的连接部设置为弧型或直线型用以改变钳嘴的夹持方向,便于操作人员在实际使用过程中更加方便、更顺手;尤其是在操作空间受到限制的地方,可以顺着体腔的方向伸入或牵出,以便于更顺利的完成操作。
在另一个实施例中,所述第一钳嘴1和第二钳嘴2的中心点之间的距离为5~10cm。
通过将第一钳嘴1和第二钳嘴2的距离设置为可调的5~10cm,可以根据需要抓持的组织不同断面之间的距离进行调整,更有利于组织理顺拉出。
在另一个实施例中,如图1所示,所述手柄4上限位装置8。
通过设置限位装置8用于防止钳嘴的夹持力过大。
在另一个实施例中,如图2和图3所示,所述固定扣9上设有若干圆角。
通过设置圆角用于防止在人体模型的体腔中对体腔壁造成损伤。
在另一个实施例中,所述第一钳臂3的长度为10~30cm。
本发明的工作原理:首先,在进入腹腔内时,取下固定螺栓13,然后,在固定板10之间,调整第二钳臂4的位置,在第二钳嘴2达到合适的夹持位置后(第一钳嘴1和第二钳嘴2的中心点之间的距离范围在5~15cm),放置上固定扣9,并使得第一通孔11和第二通孔12对齐,接着,将固定螺栓13从第一通孔11穿入,经过第二通孔12,从而达到固定住第二钳嘴2的作用,再装上保护帽14,防止手术过程中固定螺栓12对患者造成不必要的损伤,在进入腹腔内时,由于第二钳嘴2到第一钳臂3的水平面高度低于第一钳嘴1到第一钳臂1之间的水平面高度,可以起到防止钳嘴过于突出而对腔道壁造成损伤,进入到腹腔内进行手术时,由于组织或器官存在有冗杂、成团状的情况,则可以在找到合适的夹持位置之后,将第一钳嘴1和第二钳嘴2同时夹持在组织或器官上,将其牵拉出腔道内,且能够防止组织或器官在牵拉时,出现组织断裂而导致需重新夹持牵拉的情况。
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。