1.本发明涉及一种有源振动噪音降低系统,该有源振动噪音降低系统用于产生与诸如发动机旋转、车辆行驶等所产生的车厢内噪音之类的振动噪音相反相位的控制声音,并使该控制声音干扰振动噪音,以降低振动噪音。
背景技术:
2.作为减少客厢中的噪音的方法,存在一种使用称为直接自适应算法的算法的控制方法,该算法不需要预先识别声学特性c,并且可以在控制过程中跟随声学特性c的变化。
3.jp2008
‑
216375a公开了使用直接自适应算法的噪音抵消系统(有源消音器)(参见jp2008
‑
216375a的图1)。jp2008
‑
216375a中公开的噪音抵消系统包括三个有限冲激响应(fir)滤波器,即:用作用于降噪的自适应滤波器(控制fir滤波器(c));表示从噪音源到误差麦克风的噪音传递路径(w1)的估计特性的自适应滤波器(控制fir滤波器(d));以及表示从控制扬声器到误差麦克风的传递路径(g)的估计特性的自适应滤波器(控制fir滤波器(k))。控制fir滤波器的自适应更新使用系统中根据误差麦克风检测到的误差信号e产生的两个虚拟误差信号e1、e2。
4.使用jp2008
‑
216375a的图1中所示的直接自适应算法的噪音抵消系统根据以下原理进行操作。
5.e1=e
‑
r*c*k
‑
r*d,e2=r*d r*k*c
6.这里,e1是虚拟误差信号,e2是虚拟误差信号,e是误差信号,r是参考信号的时间序列信号矢量,*是滤波计算(fir滤波器中的卷积计算),c是控制fir滤波器(c)的滤波器系数,k是控制fir滤波器(k)的滤波器系数,d是控制fir滤波器(d)的滤波器系数。
7.因此,在直接自适应算法中,在系统中计算两个虚拟误差信号e1、e2。通过将上面公式中的两个虚拟误差信号e1、e2相加,获得下面的公式。
8.e1 e2=e
‑
r*c*k r*k*c
9.如果两个虚拟误差信号e1、e2同时收敛到最小值(0),则使用虚拟误差信号e1、e2更新的控制fir滤波器(c)和控制fir滤波器(k)也收敛到常数值,因此在上面公式中e变为0。
10.从上述内容可以理解,如果在控制过程中在不使用声学特性(g)的预先测量值的情况下虚拟误差信号e1、e2同时收敛到最小值,则在误差麦克风位置处的声压(e)也收敛到最小值。
11.下文中,将描述“使用fir滤波器的直接自适应算法”和“通过最小均方(lms)算法的滤波器系数更新”。
12.首先,参考图1,将描述使用fir滤波器的直接自适应算法。如图1中所示,在该有源振动噪音降低系统中,使用表示初级路径的传递特性的初级路径传递特性d^和表示次级路径的传递特性的次级路径传递特性y^。初级路径是从振动噪音源到误差信号检测器(误差麦克风)的路径。次级路径是从振动噪音抵消器(次级声源,扬声器)到误差信号检测器的路
径。
13.根据图1中所示的直接自适应算法的框图,无需预先识别c即可抵消噪音并且即使c在控制过程中发生变化也可以抵消噪音,此原理可以表达如下。
14.e
n
=d
n
y
n
=h
n
*x
n
c
n
*w
n
*x
n
…
(a)
15.e1
n
=e
n
‑
y^
n
‑
d^
n
=e
n
‑
c^
n
*w
n
*x
n
‑
h^
n
*x
n
…
(b)
16.e2
n
=d^
n
y^
n
=h^
n
*x
n
c^
n
*w
n
*x
n
…
(c)
17.在此,“^”表示识别值(估计值)。
18.当e1和e2收敛到最小值(=0)时,下面的联立方程根据公式(b)和公式(c)成立。
19.e
n
‑
c^
n
*w
n
*x
n
‑
h^
n
*x
n
=0
…
(1)
20.h^
n
*x
n
c^
n
*w
n
*x
n
=0
…
(2)
21.根据公式(2),以下公式成立。
22.c^
n
*w
n
*x
n
=
‑
h^
n
*x
n
23.w
n
=
‑
h^
n
/c^
n
…
(3)
24.根据公式(1)和公式(3),以下公式成立。
25.e
n
‑
c^
n
*w
n
*x
n
‑
h^
n
*x
n
=h
n
*x
n
c
n
*w
n
*x
n
‑
c^
n
*(
‑
h^
n
/c^
n
)*x
n
‑
h^
n
*x
n
=0
26.h
n*
x
n
c
n
*w
n
*x
n
=0
27.c
n
*w
n
*x
n
=
‑
h
n
*x
n
28.w
n
=
‑
h
n
/c
n
…
(5)
29.∴w
n
=
‑
h
n
/c
n
=
‑
h^
n
/c^
n
…
(4)
30.通过将公式(5)代入公式(a),导出下面的公式,并且得到“e=0”。
31.e
n
=d
n
y
n
=h
n
*x
n
c
n
*w
n
*x
n
=h
n
*x
n
c
n
*(
‑
h
n
/c
n
)*x
n
=0
32.因此,根据直接自适应算法,即使当h^和c^的真实值未知时,如果e1和e2收敛到“0”,则h^和c^之间的比率也收敛到常数值(h^和c^收敛到相应的常数值),并且控制滤波器系数w也收敛到最佳值(=
‑
h/c),由此误差信号e被最小化。这即是直接自适应算法无需预先识别c即可实现噪音抵消(或减振)并且即使c在控制过程中发生变化也可以实现噪音抵消(或减振)的原理。
33.接下来,将描述在使用fir滤波器的直接自适应算法中,使用虚拟误差信号e1和e2根据lms算法进行的滤波器系数的更新。下面的公式表示h^的更新。
[0034][0035]
∴h^
n 1
=h^
n
‑
μ*e1
n
*x
n
…
(6)
[0036]
下面的公式表示c^的更新。
[0037][0038]
∴c^
n 1
=c^
n
‑
μ*e1
n
*w
n
*x
n
…
(7)
[0039]
下面的公式表示w的更新。
[0040][0041]
∴w
n 1
=w
n
‑
μ*e2
n
*c^
n
*x
n
…
(8)
[0042]
每个更新公式都使用lms算法以基于输入信号和误差信号顺序地更新滤波器系数,使得误差信号最小化。这里,每个更新公式中的μ均是具有用于控制(确定)每个采样的自适应滤波器的滤波器系数的更新量的正标量的参数,并且被称为步长参数。注意,通常步长参数是一个正常数。
[0043]
由上可知,e1和e2由下面的公式表达。
[0044]
h^
n 1
=h^
n
‑
μ*e1
n
*x
n
…
(6)
[0045]
c^
n 1
=c^
n
‑
μ*e1
n
*w
n
*x
n
…
(7)
[0046]
w
n 1
=w
n
‑
μ*e2
n
*c^
n
*x
n
…
(8)
[0047]
e1
n
=e
n
‑
y^
n
‑
d^
n
=e
n
‑
c^
n
*w
n
*x
n
‑
h^
n
*x
n
…
(b)
[0048]
e2
n
=d^
n
y^
n
=h^
n
*x
n
c^
n
*w
n
*x
n
…
(c)
[0049]
在此,n表示时间步长,并且n表示以上三个fir滤波器的抽头数(脉冲长度)。另外,x(n)表示标准信号,并且x(n)由下面的公式定义。注意,x(n)表示标准信号的时间序列信号矢量。
[0050]
x
n
=x(n)=[x(n),x(n
‑
1),x(n
‑
2),
…
,x(n
‑
n 1)]
t
[0051]
初级路径模型(估计值、滤波器)、次级路径模型(估计值、滤波器)和控制滤波器的滤波器系数表达如下。
[0052]
h^
n
=[h0(n),h1(n),h2(n),
…
,h
n
‑1(n)]
t
[0053]
c^
n
=[c0(n),c1(n),c2(n),
…
,c
n
‑1(n)]
t
[0054]
w
n
=[w0(n),w1(n),w2(n),
…
,w
n
‑1(n)]
t
[0055]
误差信号en=e(n),它是一个测量值(标量)。
[0056]
假设次级声源的输出(扬声器输出,控制滤波器输出)由u(n)表示,则u(n)由以下公式表示。
[0057][0058]
其中“*”表示卷积和。
[0059]
另外,u(n)由下面的公式表达。
[0060][0061]
假设参考信号由r(n)表示,则r(n)由以下公式表示。
[0062][0063]
其中“*”表示卷积和。
[0064]
在此,r(n)表达如下。
[0065][0066]
根据公式(b),导出以下公式。
[0067][0068]
另外,根据公式(c)导出以下公式。
[0069][0070]
根据公式(6)和公式(9),h^的更新表示如下。
[0071]
h^
n 1
=h^
n
‑
μ
h
*e1(n)*x(n)
[0072]
[h0(n 1),
…
,h
n
‑1(n 1)]
t
=[h0(n),
…
,h
n
‑1(n)]
t
h^
n
‑
μ
h
*e1(n)*[x(n),x(n
‑
1),
…
,x(n
‑
n 1)]
t
[0073][0074]
根据公式(7)和公式(9),c^的更新表示如下。
[0075]
c^
n 1
=c^
n
‑
μ
c
*e1(n)*w
n
*x(n)
[0076]
=c^
n
‑
μ
c
*e1(n)*u(n)
[0077]
[c0(n 1),
…
,c
n
‑1(n 1)]
t
=[c0(n),
…
,c
n
‑1(n)]
t
‑
μ
c
*e1(n)*[u(n),u(n
‑
1),
…
,u(n
‑
n 1)]
t
[0078][0079]
根据公式(8)和公式(10),w的更新表示如下。
[0080]
w
n 1
=w
n
‑
μ
w
*e2(n)*c^
n
*x(n)
[0081]
=w
n
‑
μ
w
*e2(n)*r(n)
[0082]
[w0(n 1),
…
,w
n
‑1(n 1)]
t
=[w0(n),
…
,w
n
‑1(n)]
t
‑
μ
w
*e2(n)*[r(n),r(n
‑
1),
…
,r(n
‑
n 1)]
t
[0083][0084]
根据直接自适应算法,不需要预先识别从控制声源(扬声器)到误差麦克风的空间传递路径的声学特性c,并且即使c在控制过程中发生变化,也可以实现噪音抵消(或减振)。然而,在直接自适应算法中,三个自适应滤波器(即,控制滤波器(滤波器系数w);用于初级路径模型的滤波器(滤波器系数h^);以及用于次级路径模型的滤波器(滤波器系数c^))是必要的。
[0085]
如jp2008
‑
216375a中所示,在每个自适应滤波器中使用fir滤波器的情况下,当更新三个滤波器中每一者的滤波器系数时,如上述更新公式(a)、(b)和(c)所示进行卷积运算,这会增加计算负荷。此外,在抵消客厢振动噪音的情况下,例如,为了应对车辆的快速加速,需要设定高采样频率并增加每个fir滤波器的抽头数。因此,fir滤波器的计算负荷变大,并且这需要在有源振动噪音降低系统中使用具有高计算能力的数字信号处理器,这使得有源振动噪音降低系统不合需要地昂贵。
[0086]
另一方面,与发动机的输出轴的旋转(或发动机旋转速度)同步地产生的振动噪音(例如发动机消声声音)是周期性复调(谐波复调),该周期性复调的基本频率为发动机旋转速度的半阶分量。发动机消声声音是由于由发动机旋转产生的振动激振力向车身的传递而产生的振动辐射声音,因此表现出与发动机旋转速度同步的明显的周期性。例如,在四冲程四缸发动机中,由于由发动机输出轴每旋转一半发生的气体燃烧引起的扭矩波动,产生源自发动机的励磁振动,这导致客厢中的振动噪音。因此,在四冲程四缸发动机的情况下,具有两倍于发动机旋转速度的频率的振动噪音在发动机消声声音中占优势,该振动噪音可被称为发动机输出轴的旋转二阶分量。因此,可以预计的是,通过进行集中于优势振动噪音的振动噪音控制,可以有效地实现噪音抵消或减振效果。有了这种意识,本技术人提出了一种技术,该技术从振动噪音源检测引起产生振动噪音的频率,并使用自适应陷波滤波器(单频自适应陷波(san)滤波器)抵消检测到的频率(占振动噪音的大部分的主频率)的谐波频率处的噪音或阻尼振动,从而该控制专用于周期性和窄频带噪音的振动噪音控制,并且可以有效地实现噪音抵消/减振效果(参见jp2000
‑
99037a、jp2004
‑
361721a等)。注意,使用自适应陷波滤波器的有源振动噪音降低系统不需要卷积运算,并且可以通过简单的四则运算来执行控制,因此具有计算负荷非常小的优势。
[0087]
下文中,描述了使用自适应陷波滤波器的有源振动噪音降低系统的概况。
[0088]
图2中所示的具有滤波器系数c^的自适应陷波滤波器可以被认为是将幅值乘以c并延迟相位。假设频率由f表示,1[秒]对应于2πf[弧度],并且时间t[秒]对应于x[弧度],则获得以下公式。
[0089]
1:2πf=t:x
[0090]
∴x=2πft
[0091]
假设c^将相位延迟则获得以下公式。
[0092]
[0093]
when f(t)=cos(2nft)=xc when f(t)=sin(2nft)=xs
[0094][0095]
∵i*cos(2nft)=cos(2nft
‑
n/2)=
‑
sin(2nft)
[0096]
i*sin(2nft)=sin(2nft
‑
n/2)=cos(2nft)
[0097]
这是因为如图3中所示,乘以i意味着逆时针旋转π/2(90度)。此外,乘以
‑
i意味着顺时针旋转90度,因此,以下公式成立。
[0098]
i*xc=cos(θ π/2)=
‑
sin(θ)=
‑
xs
[0099]
i*xs=sin(θ π/2)=cos(θ)=xc
[0100]
‑
i*xc=cos(θ
‑
π/2)=sin(θ)=xs
[0101]
‑
i*xs=sin(θ
‑
π/2)=
‑
cos(θ)=
‑
xc
[0102]
因此,自适应陷波滤波器如图4所示构造。注意,标准正弦波信号xs和标准余弦波信号xc由以下公式表示。
[0103]
xc=cos(2πft)
[0104]
xs=sin(2πft)
[0105]
接下来,将描述lms算法。关于图5中所示的误差信号e,以下公式成立。
[0106]
e=d y=n1*x k1*m1*x
[0107]
j=e2=(n1*x k1*m1*x)2[0108]
=n12x2 2n1k1m1x2 k12m12x2[0109]
=x2(n12 2n1k1m1 k12m12)
[0110]
其中j称为估计函数。
[0111]
lms算法获得使估计函数j最小的滤波器系数k1(扬声器的控制滤波器的滤波器系数),并且具体而言,用通过对估计函数j(或e2)相对于滤波器系数k1进行部分微分得到的值(斜率δ)来更新滤波器系数k1。斜率δ获得如下。
[0112][0113]
在获得估计函数或平方误差的斜率δ的情况下,如下面的公式所示,根据使用lms算法的自适应过程的更新公式,使用斜率δ作为步长参数μ获得使估计函数或平方误差(e2)最小的传递特性(k1)。
[0114]
k1
n 1
=k1
n
‑
μ*e
n
*m1*x
n
[0115]
接下来,参考图6,将描述使用自适应陷波滤波器的lms算法。以下公式是从cos信号(xc)和sin信号(xs)乘以i得出的。
[0116]
i*xc(n)=i*cos(2nft)=cos(2nft n/2)=
‑
sin(2nft)=
‑
xs(n)
[0117]
i*xs(n)=i*sin(2nft)=sin(2nft n/2)=cos(2nft)=xc(n)
[0118]
次级路径的抵消振动噪音估计y由下面的公式表示。
[0119]
y=c^*[w0*xc(n) w1*xs(n)],c^=c0 ic1
[0120]
=[c0 ic1]*[w0*xc(n) w1*xs(n)]
[0121]
=w0*[c0*xc(n) c1*xs(n)] w1*[c0*xs(n)
‑
c1*xc(n)]
[0122]
在图6中,抵消声音传递特性估计值c^由下面的公式表示。
[0123]
c^=c0
‑
ic1
[0124]
根据以下公式进行w0和w1的更新。
[0125]
e(n)=d(n) y(n)
[0126]
={d(n) w0*[c0*xc(n)
‑
c1*xs(n)] w1*[c0*xs(n) c1*xc(n)]}
[0127]
j={e(n)}2={d(n) w0*[c0*xc(n)
‑
c1*xs(n)] w1*[c0*xs(n) c1*xc(n)]}2[0128]
lms算法获得使估计函数j最小化的滤波器系数w0、w1,并且具体而言,通过使用通过将估计函数j相对于自适应陷波滤波器(扬声器的控制滤波器)的滤波器系数w0、w1部分微分而获得的值作为步长参数来更新滤波器系数w0、w1。滤波器系数w0、w1的更新公式表达如下。
[0129][0130]
∴w0(n 1)=w0(n)
‑
μ*e*[c0*xc(n)
‑
c1*xs(n)]
[0131][0132]
∴w1(n 1)=w1(n)
‑
μ*e*[c0*xs(n) c1*xc(n)]
[0133]
图7是使用基于xat的自适应陷波滤波器的lms算法的框图。在该实施例中,滤波器系数w0、w1由以下公式表示。
[0134]
∴w0
n 1
=w0
n
‑
μ
w0
*e
n
*(c0*xc
n
‑
c1*xs
n
)
[0135]
w1
n 1
=w1
n
‑
μ
w1
*e
n
*(c0*xs
n
c1*xc
n
)
[0136]
然而,由于使用jp2008
‑
216375a中描述的直接自适应算法的控制系统在控制过程中更新三个fir滤波器,因此存在一个问题,即与使用滤波x算法的传统控制系统相比,计算量大且收敛慢。为了解决该问题,jp2008
‑
216375a的控制系统采用了这样一种方法,该方法在初始收敛中使用快速ftf自适应算法,并且在收敛之后,使用稳定性优异的lms算法。然而,关于计算负荷的问题,由于jp2008
‑
216375a的控制系统使用需要大量计算的fir滤波器,因此需要具有高计算能力的处理器来实施该控制方法,这使得控制装置昂贵。
[0137]
在直接自适应算法中使用jp2000
‑
99037a或jp2004
‑
361721a中公开的自适应陷波滤波器的情况下,重要的是对初级和次级路径特性进行优化建模。如果未对其进行优化建模,则无法获得将作为控制滤波器的自适应陷波滤波器的滤波器系数进行更新的优化参考信号,并且可能难以充分响应车辆的快速加速,例如,难以获得足够的振动噪音控制效果。
技术实现要素:
[0138]
鉴于这样的背景,本发明的一个目的是提供这样一种有源振动噪音降低系统,该有源振动噪音降低系统成本低,并且在该有源振动噪音降低系统中,执行有源噪音控制(anc)以根据发动机旋转速度等消除噪音,计算负荷需求小的自适应陷波滤波器(单频自适
应陷波(san)滤波器)用于构成控制系统(san滤波器直接自适应算法),该控制系统无需预先识别声学特性c并能够在控制过程中跟随c的变化,因此即使c发生显著变化,也可以实现优良的噪音抵消/减振性能。
[0139]
为了实现该目的,本发明的一个实施方式提供了一种有源振动噪音降低系统10,所述有源振动噪音降低系统包括:标准信号产生部21,所述标准信号产生部构造成产生具有与从振动噪音源产生的振动噪音的频率对应的频率的标准正弦波信号xs和标准余弦波信号xc作为标准信号;第一自适应陷波控制滤波器w0,所述第一自适应陷波控制滤波器构造成基于所述标准余弦波信号输出第一控制信号uc;第二自适应陷波控制滤波器w1,所述第二自适应陷波控制滤波器构造成基于所述标准正弦波信号输出第二控制信号us;振动噪音抵消器12,所述振动噪音抵消器构造成基于通过将所述第一控制信号和所述第二控制信号相加获得的第一相加信号u0来输出抵消振动噪音y;误差信号检测器11,所述误差信号检测器构造成基于从所述振动噪音源产生的所述振动噪音d与从所述振动噪音抵消器输出的所述抵消振动噪音之间的差来输出误差信号e;以及校正部27,所述校正部构造成通过利用与从所述振动噪音抵消器到所述误差信号检测器的信号传递特性c相对应的第一校正滤波器c^0和第二校正滤波器c^1针对所述标准信号的频率校正所述标准余弦波信号和所述标准正弦波信号来产生第一参考信号r0和第二参考信号r1。
[0140]
所述有源振动噪音降低系统还包括:第一估计信号产生部28,所述第一估计信号产生部构造成利用第三校正滤波器h^0和第四校正滤波器h^1来校正所述标准余弦波信号和所述标准正弦波信号,以分别获得第一振动噪音估计信号和第二振动噪音估计信号,并且通过将所述第一振动噪音估计信号和所述第二振动噪音估计信号相加而产生振动噪音估计信号d^;第二估计信号产生部27、70,所述第二估计信号产生部构造成通过将通过利用所述第一校正滤波器c^0和所述第一自适应陷波控制滤波器w0校正所述标准余弦波信号而获得的第一校正控制信号、通过利用所述第二校正滤波器c^1和所述第一自适应陷波控制滤波器w0校正所述标准正弦波信号而获得第二校正控制信号、通过利用所述第一校正滤波器c^0和所述第二自适应陷波控制滤波器w1校正所述标准正弦波信号而获得的第三校正控制信号以及通过利用所述第二校正滤波器c^1和所述第二自适应陷波控制滤波器w1校正所述标准余弦波信号而获得的第四校正控制信号相加来产生第一抵消振动噪音估计信号y^2;第一虚拟误差信号产生部82,所述第一虚拟误差信号产生部构造成根据所述振动噪音估计信号d^和所述第一抵消振动噪音估计信号y^2产生第一虚拟误差信号e'2;以及第一滤波器系数更新部72、74,所述第一滤波器系数更新部构造成基于所述第一参考信号r0和所述第二参考信号r1以及所述第一虚拟误差信号e'2顺序地更新所述第一自适应陷波控制滤波器w0的滤波器系数和所述第二自适应陷波控制滤波器w1的滤波器系数,使得所述第一虚拟误差信号最小化。
[0141]
在以上构造中,优选地,所述第一自适应陷波控制滤波器w0构造成基于所述标准正弦波信号输出第三控制信号,所述第二自适应陷波控制滤波器w1构造成基于所述标准余弦波信号输出第四控制信号,所述第一校正滤波器c^0由第一自适应陷波校正滤波器构造成,并且所述第二校正滤波器c^1由第二自适应陷波校正滤波器构造成,所述有源振动噪音降低系统还包括:第三估计信号产生部60,所述第三估计信号产生部构造成通过将通过利用所述第一自适应陷波校正滤波器c^0校正所述第一相加信号u0而获得的第五校正控制信
号与通过利用所述第二自适应陷波校正滤波器c^1校正将所述第三控制信号和所述第四控制信号相加获得的第二相加信号u1而获得的第六校正控制信号相加来产生第二抵消振动噪音估计信号y^1;第二虚拟误差信号产生部81,所述第二虚拟误差信号产生部构造成根据所述误差信号e、所述振动噪音估计信号d^以及所述第二抵消振动噪音估计信号y^1产生第二虚拟误差信号e'1;以及第二滤波器系数更新部62、64,所述第二滤波器系数更新部构造成基于所述第一控制信号、所述第二控制信号、所述第三控制信号、所述第四控制信号和所述第二虚拟误差信号,顺序地更新所述第一自适应陷波校正滤波器c^0的滤波器系数和所述第二自适应陷波校正滤波器c^1的滤波器系数,使得所述第二虚拟误差信号最小化。
[0142]
在以上构造中,优选地,所述第三校正滤波器h^0由第三自适应陷波校正滤波器构造成,并且所述第四校正滤波器h^1由第四自适应陷波校正滤波器构造成,所述有源振动噪音降低系统还包括第三滤波器系数更新部52、54,所述第三滤波器系数更新部构造成基于所述标准正弦波信号xs、所述标准余弦波信号xc和所述第二虚拟误差信号顺序地更新所述第三自适应陷波校正滤波器51的滤波器系数和所述第四自适应陷波校正滤波器53的滤波器系数,使得所述第二虚拟误差信号最小化。
[0143]
在以上构造中,优选地,所述有源振动噪音降低系统还包括归一化部90,所述归一化部构造成通过将所述第一自适应陷波校正滤波器c^0的滤波器系数和所述第二自适应陷波校正滤波器c^1的滤波器系数乘以所述第一自适应陷波校正滤波器c^0的滤波器系数和所述第二自适应陷波校正滤波器c^1的滤波器系数的平方和的平方根的乘法逆来计算第一归一化滤波器系数和第二归一化滤波器系数,其中,所述校正部27构造成通过利用具有所述第一归一化滤波器系数的所述第一自适应陷波校正滤波器c^0和具有所述第二归一化滤波器系数的所述第二自适应陷波校正滤波器c^1校正所述标准余弦波信号xc和所述标准正弦波信号xs来产生所述第一参考信号r0和所述第二参考信号r1。
[0144]
在以上构造中,优选地,所述有源振动噪音降低系统还包括归一化部90,所述归一化部构造成通过将所述第一自适应陷波校正滤波器c^0的滤波器系数和所述第二自适应陷波校正滤波器c^1的滤波器系数乘以所述第一自适应陷波校正滤波器的滤波器系数的绝对值和所述第二自适应陷波校正滤波器的滤波器系数的绝对值中较大的一者的乘法逆来计算第三归一化滤波器系数和第四归一化滤波器系数,其中,所述校正部27构造成通过利用具有所述第三归一化滤波器系数的所述第一自适应陷波校正滤波器c^0和具有所述第四归一化滤波器系数的所述第二自适应陷波校正滤波器c^1校正所述标准余弦波信号和所述标准正弦波信号来产生所述第一参考信号r0和所述第二参考信号r1。
[0145]
在以上构造中,优选地,所述第一滤波器系数更新部72、74、所述第二滤波器系数更新部62、64和所述第三滤波器系数更新部52、54中的每一者均构造成基于紧接更新前要由此更新的自适应陷波滤波器的滤波器系数的平方和的平方根来确定用于控制所述自适应陷波滤波器的滤波器系数的更新量的步长参数μ。
[0146]
在以上构造中,优选地,所述第一滤波器系数更新部72、74、所述第二滤波器系数更新部62、64和所述第三滤波器系数更新部52、54中的每一者均构造成基于紧接更新前要由此更新的自适应陷波滤波器的滤波器系数的绝对值中较大的一者来确定用于控制所述自适应陷波滤波器的滤波器系数的更新量的步长参数μ。
[0147]
因此,根据本发明,例如,在将误差麦克风放置在车辆乘员的耳朵附近的头枕上并
且由于座椅位置或座椅角度的调整或由于老化而导致的c发生显著变化的情况下,能够执行有源振动噪音控制而不会劣化噪音抵消性能,从而极大地提高了车辆乘员耳朵附近的噪音抵消效果。
附图说明
[0148]
图1是根据直接自适应算法使用fir滤波器的振动噪音降低系统的框图;
[0149]
图2是自适应陷波滤波器的构造图;
[0150]
图3是用于说明自适应陷波滤波器的原理的说明图;
[0151]
图4是自适应陷波滤波器的详细构造图;
[0152]
图5是用于说明lms算法的说明图;
[0153]
图6是用于说明lms算法的说明图;
[0154]
图7是使用基于xat的自适应陷波滤波器的lms算法的框图;
[0155]
图8是使用自适应陷波滤波器的直接自适应算法的说明图;
[0156]
图9是根据使用自适应陷波滤波器的直接自适应算法优化建模的振动噪音降低系统的框图;
[0157]
图10是示出根据本发明的有源振动噪音降低系统的第一应用例的构造图;
[0158]
图11是示出根据本发明的有源振动噪音降低系统的第二应用例的构造图;
[0159]
图12是示出根据本发明的有源振动噪音降低系统的第三应用例的构造图;
[0160]
图13是根据第一实施方式的有源振动噪音降低系统的功能框图;
[0161]
图14是示出假设发生的声学特性的变化的曲线图;
[0162]
图15是示出与控制关闭时以及与传统实施例相比,根据第一实施例方式的有源振动噪音降低系统中的发动机消声声音的声压级的曲线图;
[0163]
图16是根据第二实施方式的有源振动噪音降低系统的功能框图;
[0164]
图17是示出与控制关闭时以及与第一实施方式相比,根据步长参数固定的第二实施方式的有源振动噪音降低系统中的发动机消声声音的声压级的曲线图;以及
[0165]
图18是示出与控制关闭时以及与步长参数固定时相比,在根据步长参数可变的第二实施方式的有源振动噪音降低系统中,发动机消声声音的声压级的曲线图。
具体实施方式
[0166]
下文中,将参考附图详细描述本发明的实施方式。
[0167]
在直接自适应算法中使用自适应陷波滤波器时的优化建模如下进行。
[0168]
假设时间步长由n(时间;t)表示,并且该时间的标准信号由x(n)表示,则x(n)由下面的公式表示。注意,在san滤波器中,使用正交的两个标准信号x(xc,xs)。
[0169]
xc(n)=cos(2nft)
[0170]
xs(n)=sin(2nft)
[0171]
其中f是频率。
[0172]
初级路径模型(估计值、滤波器)、次级路径模型(估计值、滤波器)和控制滤波器的滤波器系数表示如下。
[0173]
h^
n
=h^(n)=h0^(n) ih1^(n)
[0174]
c^
n
=c^(n)=c0^(n) ic1^(n)
[0175]
xc的自适应滤波器由w0(n)表示,并且xs的自适应滤波器由w1(n)表示。
[0176]
误差信号en由e(n)表示,其是测量值(标量)。
[0177]
如图8中所示,假设次级声源输出(扬声器输出、控制滤波器输出)由u0(n)表示,则u0(n)由以下公式表示。
[0178]
u0(n)=w0(n)*xc(n) w1(n)*xs(n)
[0179]
假设初级路径中的标准信号由x表示,则振动噪音估计信号d^(n)由以下公式表示。这里,由于在振动噪音源处产生振动噪音,因此假设振动噪音的标准信号是cos信号(xc)。
[0180]
d^(n)=h^(n)*x(n)=h^(n)*xc(n)
ꢀꢀꢀꢀꢀꢀꢀꢀ
i*xc(n)=
‑
xs(n)
[0181]
=[h0(n) ih1(n)]*xc(n)
ꢀꢀ
i*xs(n)=xc(n)
[0182]
=h0(n)*xc(n) ih1(n)*xc(n)
[0183]
=h0(n)*xc(n)
‑
h1(n)*xs(n)
[0184]
注意,到达麦克风(或输入到麦克风)的噪音由d(n)表示,d(n)由以下公式表示。
[0185]
d(n)=h^(n)*x(n)=h^(n)*xc(n)
[0186]
=[h0(n) ih1(n)]*xc(n)
[0187]
=h0(n)*xc(n) ih1(n)*xc(n)
[0188]
=h0(n)*xc(n)
‑
h1(n)*xs(n)
[0189]
∵d^=d
[0190]
抵消振动噪音估计信号y^(n)和参考信号r0(n)、r1(n)由以下公式表示。
[0191]
y^(n)=c^(n)*u0(n)
[0192]
=[c0(n) ic1(n)]*[w0(n)*xc(n) w1(n)*xs(n)]
[0193]
={c0*[w0(n)*xc(n) w1(n)*xs(n)] c1(n)*[w0(n)*xs(n)
‑
w1(n)*xc(n)]}
[0194]
or
[0195]
={w0(n)*[c0(n)*xc(n) c1(n)*xs(n)] w1(n)*[c0(n)*xs(n)
‑
c1(n)*xc(n)]}
[0196]
∴r0(n)=c0(n)*xc(n) c1(n)*xs(n)
[0197]
r1(n)=c0(n)*xs(n)
‑
c1(n)*xc(n)
[0198]
虚拟误差信号e1(n)、e2(n)由以下公式表示。
[0199]
e1(n)=e(n)
‑
y^(n)
‑
d^(n)
[0200]
=e(n)
‑
[c0(n) ic1(n)]*[w0(n)*xc(n) w1(n)*xs(n)]
‑
[h0(n)*xc h1(n)*xs(n)]
[0201]
=e(n)
‑
c0(n)*[w0(n)*xc(n) w1(n)*xs(n)]
‑
c1(n)*[w0(n)*xs(n)
‑
w1(n)*xc(n)]
[0202]
‑
[h0(n)*xc(n) h1(n)*xs(n)]
[0203]
e2(n)=d^(n) y^(n)
[0204]
=[h0(n)*xc h1(n)*xs(n)] [c0(n) ic1(n)]*[w0(n)*xc(n) w1(n)*xs(n)]
[0205]
=[h0(n)*xc h1(n)*xs(n)] w0(n)*[c0(n)*xc(n) c1(n)*xs(n)]
[0206]
w1(n)*[c0(n)*xs(n)
‑
c1(n)*xc(n)]
[0207]
现在,将对以下方面进行描述:参考使用fir滤波器的直接自适应算法,在使用san滤波器的直接自适应算法中使用虚拟误差信号e1和e2根据lms算法更新滤波器系数。
[0208]
h^的更新(即,h0和h1的更新)是根据以下公式进行的。
[0209]
j1={e1(n)}2={e(n)
‑
c0(n)*[w0(n)*xc(n) w1(n)*xs(n)]
‑
c1(n)*[
‑
w0(n)*xs(n) w1(n)*xc(n)]
[0210]
‑
[h0(n)*xc(n)
‑
h1(n)*xs(n)]}2ꢀꢀ
(11)
[0211]
lms算法获得使估计函数j1最小化的滤波器系数h0、h1(表示从振动噪音源到麦克风(初级路径)的传递特性的自适应陷波滤波器的滤波器系数),并且具体而言,通过将估计函数j1分别相对于h0、h1进行部分微分得到的值用作步长参数而更新滤波器系数h0、h1(如下面的公式所示)。
[0212][0213]
∴h0(n 1)=h0(n)
‑
μ
h0
*e1(n)*xc(n)
[0214][0215]
∴h1(n 1)=h1(n)
‑
μ
h1
*e1(n)*xs(n)
[0216]
在此,μh0和μh1是步长参数。关于幂的微分定律如下。
[0217]
({f(x)}
n
)
′
=n{f(x)}
n
‑1f
′
(x)
[0218]
现在,将对以下方面进行描述:参考使用fir滤波器的直接自适应算法,在使用san滤波器的直接自适应算法中使用虚拟误差信号e1和e2根据lms算法更新滤波器系数。根据上面的公式(11)来进行c0和c1的更新(即,c^的更新)。lms算法获得使估计函数j1最小化的滤波器系数c0、c1(表示从扬声器到麦克风(次级路径)的传递特性的自适应陷波滤波器的滤波器系数),并且具体而言,通过将估计函数j1分别相对于c0、c1进行部分微分得到的值用作步长参数而更新滤波器系数c0、c1(如下面的公式所示)。
[0219][0220]
∴c0(n 1)=c0(n)
‑
μ
c0
*e1(n)*[w0(n)*xc(n) w1(n)*xs(n)]
[0221][0222]
∴c1(n 1)=c1(n)
‑
μ
c1
*e1(n)*[
‑
w0(n)*xs(n) w1(n)*xc(n)]
[0223]
这里,μc0和μc1是步长参数。
[0224]
根据以下公式进行w0和w1的更新。
[0225]
j2={e2(n)}2={[h0(n)*xc
‑
h1(n)*xs(n)] w0(n)*[c0(n)*xc(n)
‑
c1(n)*xs(n)]
[0226]
w1(n)*[c0(n)*xs(n) c1(n)*xc(n)]}2[0227]
lms算法获得使估计函数j2最小化的滤波器系数w0、w1(构成控制滤波器的自适应陷波滤波器的滤波器系数),并且具体而言,通过将估计函数j2分别相对于w0、w1进行部分微分得到的值用作步长参数而更新滤波器系数w0、w1(如下面的公式所示)。
[0228][0229]
∴w0(n 1)=w0(n)
‑
μ
w0
*e2(n)*[c0(n)*xc(n)
‑
c1(n)*xs(n)]
[0230][0231]
∴w1(n 1)=w1(n)
‑
μ
w1
*e2(n)*[c0(n)*xs(n) c1(n)*xc(n)]
[0232]
在此,μw0和μw1是步长参数。
[0233]
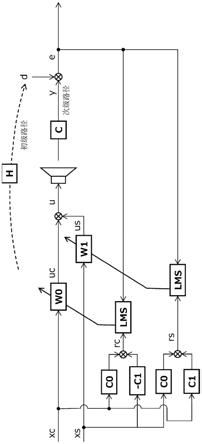
图9是基于示出使用fir滤波器的一般直接自适应算法的框图的图1,示出根据使用san滤波器的直接自适应算法优化建模的振动噪音降低系统的框。两个虚拟误差信号、三个自适应陷波滤波器的滤波器系数更新公式、抵消振动噪音估计信号和振动噪音估计信号限定如下。
[0234]
·
e1(n)=e(n)
‑
c0(n)*[w0(n)*xc(n) w1(n)*xs(n)]
‑
c1(n)*[w0(n)*xs(n)
‑
w1(n)*xc(n)]
‑
[h0(n)*xc(n) h1(n)*xs(n)]
…
(i)
[0235]
·
e2(n)=[h0(n)*xc(n) h1(n)*xs(n)] w0(n)*[c0(n)*xc(n) c1(n)*xs(n)] w1(n)*[c0(n)*xs(n)
‑
c1(n)*xc(n)]
…
(ii)
[0236][0237][0238][0239]
·
d(n)=h0(n)*xc(n) h1(n)*xs(n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ…
(vii)
[0240]
·
y(n)=c0(n)*[w0(n)*xc(n) w1(n)*xs(n)] c1(n)*[w0(n)*xs(n)
‑
w1(n)*xc(n)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ…
(vi)
[0241]
具体而言,图9中示出了根据使用san滤波器的直接自适应算法,从公式(i)至(vii)进行优化建模的振动噪音降低系统的框图。
[0242]
滤波器c^对应于从扬声器到误差麦克风的声学特性(信号传递特性)的估计值(次级路径模型),因此其幅值根据频率而变化。
[0243]
w0(n 1)=w0(n)
‑
μ
w0
*e2*[c0^(n)*xc(n) c1^(n)*xs(n)]=w0(n)
‑
μ
w0
*e2*r0(n)
[0244]
w1(n 1)=w1(n)
‑
μ
w1
*e2*[c0^(n)*xs(n)
‑
c1^(n)*xc(n)]=w1(n)
‑
μ
w1
*e2*r1(n)
[0245]
c0^(n 1)=c0^(n)
‑
μ
c0
*e1(n)*[w0(n)*xc(n) w1(n)*xs(n)]=c0^(n)
‑
μ
c0
*e1(n)*u0(n)
[0246]
c1^(n 1)=c1^(n)
‑
μ
c1
*e1(n)*[w0(n)*xs(n)
‑
w1(n)*xc(n)]=c1^(n)
‑
μ
c1
*e1(n)*u1(n)
[0247]
如果c^小,则在滤波器w的更新中使用的参考信号(r0,r1)变小,并且w的收敛变慢。此外,由于c^的更新使用w的输出,因此c^本身的收敛变慢。另一方面,在c^较大的频带中,w和c^的收敛快,但是由于每次更新的更新量大,因此无法确保收敛到最佳值,这往往使控制不稳定。
[0248]
通过对c^的幅值进行归一化并仅基于c^的相位更新滤波器系数,提供了一种使用san滤波器的直接自适应算法,该算法可以提高收敛性能,同时确保与c^的幅值无关的控制稳定性。
[0249]
注意,“归一化”是矢量的归一化,即在维持矢量的方向的同时使矢量的幅值为“1”。
[0250]
z=a ib
[0251]
|z|=√(a2 b2)
[0252]
|(z/|z|)|=√[(a/|z|)2 (b/|z|)2]
[0253]
=√{[a/√(a2 b2)]2 [b/√(a2 b2)]2[0254]
=√{a2/[√(a2 b2)]2 b2/[√(a2 b2)]2}
[0255]
=√{a2/(a2 b2) b2/(a2 b2)}
[0256]
=√[(a2 b2)/(a2 b2)
[0257]
=1
[0258]
c^的归一化根据以下公式进行。
[0259]
c0^(n 1)=c0^(n)
‑
μ
c0
*e1(n)*[w0(n)*xc(n) w1(n)*xs(n)]=c0^(n)
‑
μ
c0
*e1(n)*u0(n)
[0260]
c1^(n 1)=c1^(n)
‑
μ
c1
*e1(n)*[w0(n)*xs(n)
‑
w1(n)*xc(n)]=c1^(n)
‑
μ
c1
*e1(n)*u1(n)
[0261]
c^(n 1)=c0^(n 1)
‑
ic1^(n 1)
[0262]
通过以下公式获得c^(n 1)的振幅(幅值)|c^(n 1)|。
[0263]
|c^(n 1)|=√(c0^(n 1)2 c1^(n 1)2)
[0264]
假设归一化后的c^(n 1)由c
′
^(n 1)表示,则c
′
^(n 1)通过以下公式获得。
[0265]
c
′
^(n 1)=c0
′
^(n 1)
‑
ic1
′
^(n 1)
[0266]
c0
′
^(n 1)=c0^(n 1)/|c^(n 1)|
[0267]
c1
′
^(n 1)=c1^(n 1)/|c^(n 1)|
[0268]
通过使用归一化的c
′
^(n 1)进行控制滤波器的滤波器系数(w(n 1))的更新和次级路径模型的下一滤波器系数(c^(n 2))的更新。
[0269]
代替以上归一化,还可以使用c0^和c1^的绝对值中较大的一者来减少计算量。
[0270][0271]
接下来,将描述可变步长参数。
[0272]
滤波器系数的更新以预先设定的初始值(较小值,例如“0”)开始,因此,在开始时,滤波器系数具有较小值,需要使每次更新的更新量大,以实现快速收敛到最佳值。为了增加更新量,需要将步长参数μ设定为较大值。然而,如果将μ设定为较大值,则难以确保收敛到最佳值,因此控制趋于不稳定。因此,收敛速度和稳定性处于折中关系。
[0273]
考虑到滤波器系数在更新的早期具有较小值,但是朝最佳值增加,因此提供了一种使用san滤波器的直接自适应算法,其中,每个滤波器系数的步长参数的值可以根据滤波器系数的幅值变更,从而在确保控制稳定性的同时提高收敛性能。可以通过将用于每个自适应陷波滤波器的更新公式的步长参数乘以紧接更新前自适应陷波滤波器的幅值的乘法逆,或者通过将用于每个自适应陷波滤波器的更新公式的步长参数乘以紧接更新前自适应陷波滤波器的两个滤波器系数的绝对值中较大的一者的乘法逆来进行步长参数的变更。
[0274]
使用固定步长参数的更新公式如下。
[0275]
h0^(n 1)=h0^(n)
‑
μ
h0
*e1(n)*xc(n),h1^(n 1)=h1^(n)
‑
μ
h1
*e1(n)*xs(n)
[0276]
c0^(n 1)=c0^(n)
‑
μ
c0
*e1(n)*u0(n),c1^(n 1)=c1^(n)
‑
μ
c1
*e1(n)*u1(n)
[0277]
w0(n 1)=w0(n)
‑
μ
w0
*e2*r0(n),w1(n 1)=w1(n)
‑
μ
w1
*e2*r1(n)
[0278]
通过将用于每个自适应陷波滤波器的更新公式的步长参数乘以紧接更新前自适应陷波滤波器的振幅的乘法逆来变更步长参数的具体方式如下。
[0279]
通过以下公式获得各个自适应陷波滤波器的振幅(幅值)|h^(n)|、|c^(n)|和|w
(n)|。
[0280]
|h^(n)|=√(h0^(n)2 h1^(n)2)
[0281]
|c^(n)|=√(c0^(n)2 c1^(n)2)
[0282]
|w(n)|=√(w0(n)2 w1(n)2)
[0283]
因此,通过以下公式计算各个更新公式的可变步长参数。
[0284]
μ
nh0
=μ
h0
/|h^(n)|=μ
h0
/√(h0^(n)2 h1^(n)2),μ
nh1
=μ
h1
/|h^(n)|=μ
h1
/√(h0^(n)2 h1^(n)2)
[0285]
μ
nc0
=μ
c0
/|c^(n)|=μ
c0
/√(c0^(n)2 c1^(n)2),μ
nc1
=μ
c1
/|c^(n)|=μ
c1
/√(c0^(n)2 c1^(n)2)
[0286]
μ
nw0
=μ
w0
/|w(n)|=μ
w0
/、(w0(n)2 w1^(n)2),μ
nw0
=μ
w0
/|w(n)|=μ
w0
/√(w0(n)2 w1(n)2)
[0287]
使用可变步长参数的更新公式如下。
[0288]
h0^(n 1)=h0^(n)
‑
μ
nh0
*e1(n)*xc(n),h1^(n 1)=h1^(n)
‑
μ
nh1
*e1(n)*xs(n)
[0289]
c0^(n 1)=c0^(n)
‑
μ
nc0
*e1(n)*u0(n),c1^(n 1)=c1^(n)
‑
μ
nc1
*e1(n)*u1(n)
[0290]
w0(n 1)=w0(n)
‑
μ
nw0
*e2*r0(n),w1(n 1)=w1(n)
‑
μ
nw1
*e2*r1(n)
[0291]
通过将用于每个自适应陷波滤波器的更新公式的步长参数乘以紧接更新前自适应陷波滤波器的两个滤波器系数的绝对值中较大的一者的乘法逆来变更步长参数的具体方式如下。
[0292]
通过以下公式获得各个自适应陷波滤波器的振幅(幅值)|h^(n)|、|c^(n)|和|w(n)|。
[0293][0294][0295][0296]
因此,通过以下公式计算各个更新公式的可变步长参数。
[0297]
μ
nh0
=μ
h0
/|h^(n)|,μ
nh1
=μ
h1
/|h^(n)|
[0298]
μ
nc0
=μ
c0
/|c^(n)|,μ
nc1
=μ
c1
/|c^(n)|
[0299]
μ
nw0
=μ
w0
/|w(n)|,μ
nw0
=μ
w0
/|w(n)|
[0300]
使用可变步长参数的更新公式如下。
[0301]
h0^(n 1)=h0^(n)
‑
μ
nh0
*e1(n)*xc(n),h1^(n 1)=h1^(n)
‑
μ
nh1
*e1(n)*xs(n)
[0302]
c0^(n 1)=c0^(n)
‑
μ
nc0
*e1(n)*u0(n),c1^(n 1)=c1^(n)
‑
μ
nc1
*e1(n)*u1(n)
[0303]
w0(n 1)=w0(n)
‑
μ
nw0
*e2*r0(n),w1(n 1)=w1(n)
‑
μ
nw1
*e2*r1(n)
[0304]
如上所述,在有源振动噪音降低系统中,标准信号产生部产生具有与振动噪音源产生的振动噪音的频率相对应的频率的标准正弦波信号xs和标准余弦波信号xc作为标准信号。第一自适应陷波控制滤波器w0基于标准余弦波信号xc输出第一控制信号uc,并且第二自适应陷波控制滤波器w1基于标准正弦波信号xs输出第二控制信号us。振动噪音抵消器基于通过将第一控制信号uc和第二控制信号us相加而获得的第一相加信号u0来输出抵消振动噪音。误差信号检测器基于从振动噪音源产生的振动噪音与从振动噪音抵消器输出的抵消振动噪音之间的差来输出误差信号e。校正部通过利用与从振动噪音抵消器到误差信
号检测器的信号传递特性相对应的第一校正滤波器c^0和第二校正滤波器c^1针对标准信号的频率校正标准余弦波信号xc和标准正弦波信号xs,来产生第一参考信号r0和第二参考信号r1。
[0305]
第一估计信号产生部利用第三校正滤波器h0和第四校正滤波器h1校正标准余弦波信号xc和标准正弦波信号xs,以分别获得第一和第二振动噪音估计信号,并通过将第一振动噪音估计信号和第二振动噪音估计信号相加而产生振动噪音估计信号d^。第二估计信号产生部通过如下操作来产生第一抵消振动噪音估计信号y^:将通过利用第一校正滤波器c^0和第一自适应陷波控制滤波器w0对标准余弦波信号xc进行校正而获得的第一校正控制信号、通过利用第二校正滤波器c^1和第一自适应陷波控制滤波器w0对标准正弦波信号xs进行校正而获得的第二校正控制信号、通过利用第一校正滤波器c^0和第二自适应陷波控制滤波器w1对标准正弦波信号xs进行校正而获得的第三校正控制信号以及通过利用第二校正滤波器c^1和第二自适应陷波控制滤波器w1对标准余弦波信号xc进行校正而获得的第四校正控制信号相加。第一虚拟误差信号产生部根据振动噪音估计信号d^和第一抵消振动噪音估计信号y^产生第一虚拟误差信号e2。第一滤波器系数更新部基于第一参考信号r0和第二参考信号r1以及第一虚拟误差信号e2顺序地更新第一自适应陷波控制滤波器w0和第二自适应陷波控制滤波器w1的滤波器系数,使得第一虚拟误差信号e2最小化。
[0306]
第一自适应陷波控制滤波器w0基于标准正弦波信号xs输出第三控制信号,并且第二自适应陷波控制滤波器w1基于标准余弦波信号xc输出第四控制信号。第一校正滤波器c^0由第一自适应陷波校正滤波器c^0构造成,并且第二校正滤波器c^1由第二自适应陷波校正滤波器c^1构造成。第三估计信号产生部通过以下操作产生第二抵消振动噪音估计信号y^:将通过利用第一自适应陷波校正滤波器c^0对第一相加信号u0进行校正而获得的第五校正控制信号与通过利用第二自适应陷波校正滤波器c^1对通过将第三控制信号和第四控制信号相加而获得的第二相加信号u1进行校正而获得的第六校正控制信号相加。第二虚拟误差信号产生部根据误差信号e、振动噪音估计信号d^和第二抵消振动噪音估计信号y^产生第二虚拟误差信号e1。第二滤波器系数更新部基于第一控制信号uc、第二控制信号us、第三控制信号、第四控制信号以及第二虚拟误差信号e1顺序地更新第一自适应陷波校正滤波器c^0和第二自适应陷波校正滤波器c^1的滤波器系数,使得第二虚拟误差信号e1最小化。
[0307]
第三校正滤波器h0由第三自适应陷波校正滤波器h0构造成,并且第四校正滤波器h1由第四自适应陷波校正滤波器h1构造成。第三滤波器系数更新部基于标准正弦波信号xs、标准余弦波信号xc和第二虚拟误差信号e1顺序地更新第三自适应陷波校正滤波器h0和第四自适应陷波校正滤波器h1的滤波器系数,使得第二虚拟误差信号e1最小化。
[0308]
归一化部通过将第一和第二自适应陷波校正滤波器的滤波器系数分别乘以第一和第二自适应陷波校正滤波器的滤波器系数的平方和的平方根的乘法逆来计算第一和第二归一化滤波器系数。校正部通过利用具有第一归一化滤波器系数的第一自适应陷波校正滤波器和具有第二归一化滤波器系数的第二自适应陷波校正滤波器对标准余弦波信号xc和标准正弦波信号xs进行校正来产生第一参考信号r0和第二参考信号r1。
[0309]
归一化部可以通过将第一自适应陷波校正滤波器c^0和第二自适应陷波校正滤波器c^1的滤波器系数乘以第一自适应陷波校正滤波器c^0和第二自适应陷波校正滤波器c^1的滤波器系数的绝对值中较大的一者的乘法逆来计算第三归一化滤波器系数和第四归一
化滤波器系数。在这种情况下,校正部基于具有第三归一化滤波器系数的第一自适应陷波校正滤波器和具有第四归一化滤波器系数的第二自适应陷波校正滤波器,通过校正标准余弦波信号xc和标准正弦波信号xs来产生第一参考信号r0和第二参考信号r1。
[0310]
第一、第二和第三滤波器系数更新部中的每一者均基于紧接更新前要由此更新的自适应陷波滤波器的滤波器系数的平方和的平方根来确定用于控制所述自适应陷波滤波器的滤波器系数的更新量的步长参数μ。
[0311]
第一、第二和第三滤波器系数更新部中的每一者均可以基于紧接更新前要由此更新的自适应陷波滤波器的滤波器系数的绝对值中较大的一者来确定用于控制所述自适应陷波滤波器的滤波器系数的更新量的步长参数μ。
[0312]
接下来,参考图10至图12,将描述根据本发明的有源振动噪音降低系统10的第一至第三应用例。在这些实施例中,有源振动噪音降低系统10应用于车辆1。
[0313]
如图10中所示,车辆1具有安装在其上的作为行驶驱动源的发动机2。有源振动噪音降低系统10包括:误差麦克风11,其用作构造成检测客厢3中的噪音的振动噪音检测单元;扬声器12,其用作构造成产生抵消声音的抵消声音产生器,抵消声音作为用于抵消噪音的控制声音,与噪音的相位相反;以及有源振动噪音控制器13。例如,误差麦克风11放置在前排座椅上方以及后排座椅上方的天花板上。扬声器12可以是音频系统的扬声器,例如安装在前门和后门中的门扬声器。每个误差麦克风11均用作误差信号检测器,该误差信号检测器构造成将来自作为振动噪音源的发动机2的噪音与来自扬声器12的抵消声音之间的抵消误差检测为误差信号e。有源振动噪音控制器13被提供诸如发动机旋转速度和车辆速度之类的车辆信息以及由每个误差麦克风11检测到的误差信号e。有源振动噪音控制器13基于车辆信息和误差信号e产生用于驱动每个扬声器12的控制信号u0(第一相加信号),以控制由扬声器12产生的抵消声音,从而降低由于发动机2的振动而传送给车辆乘员的发动机噪音(发动机消声声音)。在这种情况下,有源振动噪音控制器13用作有源噪音控制器。
[0314]
图11中所示的有源振动噪音降低系统10包括:误差麦克风11,其用于检测客厢3中的噪音;振动致动器14,其用作抵消振动发生器,抵消振动发生器构造成产生用于抵消发动机2的导致噪音的振动的抵消振动;以及有源振动噪音控制器13。由振动致动器14产生的抵消振动与发动机2的振动的相位相反。误差麦克风11与图10中所示的有源振动噪音降低系统10的误差麦克风相似。振动致动器14构造成使得所产生的抵消振动施加至发动机2,并且例如由有源发动机支座构成。有源振动噪音控制器13被提供诸如发动机旋转速度和车辆速度之类的车辆信息以及由每个误差麦克风11检测到的误差信号e。有源振动噪音控制器13基于车辆信息和误差信号e产生用于驱动振动致动器14的控制信号u0,以控制由振动致动器14产生的抵消振动,从而降低发动机2的振动,并降低由发动机2的振动传递给车辆乘员的发动机噪音(发动机消声声音)。在这种情况下,有源振动噪音控制器13用作有源振动控制器。
[0315]
图12中所示的有源振动噪音降低系统10包括:振动传感器15,其用作振动噪音检测单元,该振动噪音检测单元构造成检测发动机2的振动,该振动在客厢3中引起噪音;振动致动器14,其构造成产生用于抵消发动机2的振动的抵消振动;以及有源振动噪音控制器13。振动传感器15安装在发动机2上,并用作误差信号检测器,该误差信号检测器构造成将作为由发动机2的旋转产生的发动机振动和由振动致动器14施加至发动机2的抵消振动的
合成的误差振动检测为误差信号e。振动致动器14可以类似于图11中所示的有源振动噪音降低系统10的振动致动器。有源振动噪音控制器13被提供诸如如发动机旋转速度和车辆速度之类的车辆信息以及由振动传感器15检测到的误差信号e。有源振动噪音控制器13基于车辆信息和误差信号e产生用于驱动振动致动器14的控制信号u0,以控制由振动致动器14产生的抵消振动,从而降低发动机2的振动,并且降低由于发动机2的振动而传递给车辆乘员的发动机噪音(发动机消声声音)。在这种情况下,有源振动噪音控制器13用作有源振动控制器。
[0316]
如上所述,可以以各种模式使用根据本发明的有源振动噪音降低系统10。除了以上实施例之外,例如,可以代替发动机2而安装电马达作为驱动源,并且有源振动噪音降低系统10可以构造成降低从电马达产生的振动噪音。在又一个实施方式中,有源振动噪音降低系统10可以构造成降低由于在车辆1的行驶过程中从诸如传动轴和驱动轴之类的驱动系统旋转体产生的振动噪音而传递到车辆乘员的驱动系统噪音。因此,有源振动噪音降低系统10可以降低发动机2或驱动系统的振动噪音,该发动机2或驱动系统由于旋转体的旋转运动而产生周期性且窄频带的振动噪音。
[0317]
在以下描述的每个实施方式中,车辆1设置有作为驱动源的发动机2,有源振动噪音降低系统10设置有作为振动噪音检测单元的误差麦克风11、作为抵消声音发生器的扬声器12以及作为有源噪音控制器的有源振动噪音控制器13。
[0318]
《第一实施方式》
[0319]
将参考图13至图15描述本发明的第一实施方式。图13是根据第一实施方式的有源振动噪音降低系统10的功能框图。如图13中所示,有源振动噪音控制器13被提供发动机/驱动系统信号x。发动机/驱动系统信号x可以是与振动频率(例如发动机2的输出轴的旋转频率)同步的发动机脉冲或者用于将发动机2的驱动力传递到车轮的驱动系统的旋转脉冲。发动机/驱动系统信号x不限于此,并且可以是车辆信息的任何与操作有关的信息(即,与可以是振动噪音源的驱动源或驱动系统的操作有关的信息)。这样的与操作有关的信息例如可以是发动机2的旋转速度、车辆速度、马达旋转速度、基于档位(变速器)信息的档位旋转速度等。有源振动噪音控制器13包括标准信号产生单元21,该标准信号产生单元21构造成基于发动机/驱动系统信号x产生标准信号x(xc,xs)。
[0320]
在标准信号产生单元21中,频率估计电路22从发动机/驱动系统信号x估计在客厢3中产生噪音的振动噪音d的频率f。具体而言,频率估计电路22通过参考映射基于发动机/驱动系统信号x估计振动噪音d的频率f。估计的频率f被提供至余弦波产生电路23和正弦波产生电路24。余弦波产生电路23基于所提供的频率f产生标准余弦波信号xc,该标准余弦波信号xc是与由于发动机2的旋转从发动机2/驱动系统产生的振动噪音d同步的标准信号x。正弦波产生电路24基于所提供的频率f产生标准正弦波信号xs,该标准正弦波信号xs是与振动噪音d同步的标准信号x。换句话说,标准信号产生单元21产生具有基于发动机2/驱动系统的与操作相关的信息而估计的振动噪音d的频率f的标准信号x(xc,xs),而不是通过根据由麦克风或振动传感器检测到的振动噪音d的物理量中检测频率f来产生标准信号x(xc,xs)。由标准信号产生单元21产生的标准信号x(xc,xs)提供至控制信号产生单元25、标准信号校正单元26、参考信号产生单元27(校正部)和振动噪音估计信号产生单元28(第一估计信号产生部)。
[0321]
控制信号产生单元25是用于通过对标准信号x(xc,xs)进行滤波来产生控制信号u0的陷波滤波器,并且具有由单个复数表示的自适应陷波滤波器系数w。该自适应陷波滤波器系数w表示控制信号产生单元25的电路特性。控制信号产生单元25包括:具有第一自适应陷波滤波器系数w0的第一自适应陷波控制滤波器31,该第一自适应陷波滤波器系数w0是自适应陷波滤波器系数w的实部;具有第二自适应陷波滤波器系数w1的第二自适应陷波控制滤波器32,该第二自适应陷波滤波器系数w1是自适应陷波滤波器系数w的虚部;以及加法器33。标准余弦波信号xc提供至第一自适应陷波控制滤波器31,并通过使用第一自适应陷波滤波器系数w0被滤波。标准正弦波信号xs提供至第二自适应陷波控制滤波器32,并且通过使用第二自适应陷波滤波器系数w1被滤波。从第一自适应陷波控制滤波器31输出的第一控制信号uc和从第二自适应陷波控制滤波器32输出的第二控制信号us在加法器33处相加以产生控制信号u0。控制信号产生单元25构成标准信号校正单元26的一部分,并且利用控制信号产生单元25的电路特性(自适应陷波滤波器系数w)对标准信号x(xc,xs)进行校正以产生控制信号u0(第一相加信号)。
[0322]
标准信号校正单元26是自适应陷波滤波器,其除了上述控制信号产生单元25之外,还包括:第一自适应陷波滤波器34,其具有第一自适应陷波滤波器系数w0;第二自适应陷波滤波器35,其具有通过反转第二自适应陷波滤波器系数w1的极性而获得的系数;以及加法器36。标准余弦波信号xc提供至第一自适应陷波滤波器34,并且通过使用第一自适应陷波滤波器系数w0被滤波。标准正弦波信号xs提供至第二自适应陷波滤波器35,并通过使用作为具有相反极性的第二自适应陷波滤波器系数w1的系数被滤波。从第一自适应陷波滤波器34输出的第三控制信号和从第二自适应陷波滤波器35输出的第四控制信号在加法器36处相加以产生控制信号u1(第二相加信号)。
[0323]
从控制信号产生单元25输出的控制信号u0在d/a转换器37处转换为模拟信号,然后提供至扬声器12。扬声器12基于所提供的控制信号u0产生用于抵消从作为噪音源的发动机2/驱动系统产生的噪音的抵消声音(控制声音)。
[0324]
在参考信号产生单元27中,设定抵消声音传递特性估计值c^,该抵消声音传递特性估计值c^是用于从扬声器12到误差麦克风11的抵消声音的声学特性c的估计值。抵消声音传递特性估计值c^是由稍后将描述的第一自适应陷波校正滤波器单元60提供的值。根据设定从扬声器12到误差麦克风11的传递特性(振幅特性和相位特性)的函数,由针对抵消声音的频率f获得的单个复数来表示抵消声音传递特性估计值c^,并且抵消声音传递特性估计值c^具有实部c^0(第一校正滤波器系数)和虚部c^1(第二校正滤波器系数)。
[0325]
在参考信号产生单元27中,标准余弦波信号xc被输入至以抵消声音传递特性估计值c^的实部c^0作为其系数的第一校正滤波器41。标准正弦波信号xs被输入至以抵消声音传递特性估计值c^的虚部c^1作为其系数的第二校正滤波器42。而且,标准正弦波信号xs被输入至以抵消声音传递特性估计值c^的实部c^0作为其系数的第一校正滤波器43。标准余弦波信号xc被输入至以抵消声音传递特性估计值c^的极性反转的虚部c^1作为其系数的第二校正滤波器44。
[0326]
通过使用抵消声音传递特性估计值c^的实部c^0,由第一校正滤波器41对标准余弦波信号xc进行滤波。通过使用抵消声音传递特性估计值c^的虚部c^1,由第二校正滤波器42对标准正弦波信号xs进行滤波。在加法器45处将第一校正滤波器41的输出和第二校正滤
波器42的输出相加,从而用抵消声音传递特性估计值c^校正标准信号x(xc,xs),以产生第一参考信号r0。此外,通过使用抵消声音传递特性估计值c^的实部c^0,第一校正滤波器43对标准余弦波信号xc进行滤波。通过使用抵消声音传递特性估计值c^的极性反转的虚部c^1,第二校正滤波器44对标准正弦波信号xs进行滤波。在加法器46处将第一校正滤波器43的输出和第二校正滤波器44的输出相加,从而用抵消声音传递特性估计值c^校正标准信号x(xc,xs),以产生第二参考信号r1。
[0327]
振动噪音估计信号产生单元28是所谓的单频自适应陷波(san)滤波器。在振动噪音估计信号产生单元28中,将诸如0之类的较小值设定为传递特性估计值h^的初始值,该传递特性估计值h^是用于从作为噪音源的发动机2/驱动系统到误差麦克风11(即,噪音传播路径)的噪音的传递特性h的估计值。传递特性估计值h^根据设定从噪音源到误差麦克风11的传递特性(振幅特性和相位特性)的函数,由针对振动噪音d的频率f获得的单个复数表示,并且具有实部h^0(第三校正滤波器系数(第三自适应陷波校正滤波器系数))和虚部h^1(第四校正滤波器系数(第四自适应陷波校正滤波器系数))。传递特性估计值h^不是通过直接测量噪音源的振动频率而获得的物理量,而是根据基于发动机2/驱动系统的上述与操作相关的信息而产生的标准信号x来产生的。
[0328]
在振动噪音估计信号产生单元28中,标准余弦波信号xc被输入至以传递特性估计值h^的实部h^0作为其系数的第三自适应陷波校正滤波器51以及用于自适应地更新第三自适应陷波校正滤波器51的滤波器系数的滤波器系数更新单元52(第三滤波器系数更新部)。标准正弦波信号xs被输入至以传递特性估计值h^的虚部h^1作为其系数的第四自适应陷波校正滤波器53以及用于自适应地更新第四自适应陷波校正滤波器53的滤波器系数的滤波器系数更新单元54(第三滤波器系数更新部)。第三自适应陷波校正滤波器51和第四自适应陷波校正滤波器53是对应于关于标准信号x的频率的从驱动源或驱动系统(振动噪音源)到误差麦克风11(误差信号检测器)的初级路径的信号传递特性的校正滤波器,并且是其滤波器系数被自适应地更新的自适应陷波校正滤波器。稍后将描述滤波器系数更新单元52和滤波器系数更新单元54的细节。
[0329]
通过使用传递特性估计值h^的实部h^0,由第三自适应陷波校正滤波器51对标准余弦波信号xc进行滤波。通过使用传递特性估计值h^的虚部h^1,由第四自适应陷波校正滤波器53对标准正弦波信号xs进行滤波。从第三自适应陷波校正滤波器51输出的第一振动噪音估计信号和从第四自适应陷波校正滤波器53输出的第二振动噪音估计信号在加法器55处相加以产生振动噪音估计信号d^,该振动噪音估计信号d^是到达误差麦克风11的振动噪音d的估计值。即,振动噪音估计信号产生单元28基于标准信号x(xc,xs)产生误差麦克风11处的振动噪音估计信号d^。
[0330]
从标准信号校正单元26输出的控制信号u0和控制信号u1提供至第一自适应陷波校正滤波器单元60(第三估计信号产生部)。第一自适应陷波校正滤波器单元60是san滤波器,并且在第一自适应陷波校正滤波器单元60中,预先将诸如0之类的较小值设定为抵消声音传递特性估计值c^的初始值。在第一自适应陷波校正滤波器单元60中,控制信号u0被输入至以抵消声音传递特性估计值c^的实部c^0作为其系数的第一自适应陷波校正滤波器61以及用于自适应地更新第一自适应陷波校正滤波器61的滤波器系数的滤波器系数更新单元62(第二滤波器系数更新部)。控制信号u1被输入至以抵消声音传递特性估计值c^的的虚
部c^1作为其系数的第二自适应陷波校正滤波器63以及用于自适应地更新第二自适应陷波校正滤波器63的滤波器系数的滤波器系数更新单元64(第二滤波系数更新部)。第一自适应陷波校正滤波器61和第二自适应陷波校正滤波器63是校正滤波器,并且是其滤波器系数被自适应地更新的自适应陷波校正滤波器。稍后将描述滤波器系数更新单元62和滤波器系数更新单元64的细节。
[0331]
通过使用抵消声音传递特性估计值c^的实部c^0,由第一自适应陷波校正滤波器61对控制信号u0进行滤波。通过使用抵消声音传递特性估计值c^的虚部c^1,由第二自适应陷波校正滤波器63对控制信号u1进行滤波。从第一自适应陷波校正滤波器61输出的第一校正控制信号和从第二自适应陷波校正滤波器63输出的第二校正控制信号在加法器65处相加以产生到达误差麦克风11的抵消振动噪音y的第一估计值y^1(第二抵消振动噪音估计信号)。即,第一自适应陷波校正滤波器单元60基于控制信号u0和控制信号u1产生到达误差麦克风11的抵消声音的第一估计值y^1。
[0332]
从参考信号产生单元27输出的第一参考信号r0和第二参考信号r1提供至第三自适应陷波滤波器70(第二估计信号产生部)。第三自适应陷波滤波器70是san滤波器。在第三自适应陷波滤波器70中,预先将诸如0之类的较小值设定为表示控制信号产生单元25的电路特性的自适应陷波滤波器系数w(w0,w1)的初始值。在第三自适应陷波滤波器70中,第一参考信号r0被输入至具有作为自适应陷波滤波器系数w的实部的第一自适应陷波滤波器系数w0的第一自适应陷波控制滤波器71以及用于自适应地更新第一自适应陷波控制滤波器71的滤波器系数的滤波器系数更新单元72(第一滤波器系数更新部)。第二参考信号r1被输入至具有作为自适应陷波滤波器系数w的虚部的第二自适应陷波滤波器系数w1的第二自适应陷波控制滤波器73以及用于自适应地更新滤波器系数的滤波器系数更新单元74(第一滤波器系数更新部)。稍后将描述滤波器系数更新单元72和滤波器系数更新单元74的细节。
[0333]
通过使用第一自适应陷波滤波器系数w0,由第一自适应陷波控制滤波器71对第一参考信号r0进行滤波。通过使用第二自适应陷波滤波器系数w1,由第二参考陷波控制滤波器73对第二参考信号r1进行滤波。在加法器75处将第一自适应陷波控制滤波器71的输出和第二自适应陷波控制滤波器73的输出相加,以产生误差麦克风11处的抵消振动噪音y的第二估计值y^2(第一抵消振动噪音估计信号)。即,第三自适应陷波滤波器70基于第一参考信号r0和第二参考信号r1,产生到达误差麦克风11的抵消声音的第二估计值y^2。
[0334]
在第三自适应陷波滤波器70中自适应更新的自适应陷波滤波器系数w(w0,w1)提供给控制信号产生单元25。即,在控制信号产生单元25中设定的自适应陷波滤波器系数w(w0,w1)不是固定值,并且与由滤波器系数更新单元72和滤波器系数更新单元74顺序更新的值相同的值分别被自适应地设定为自适应陷波滤波器系数w的实部w0和虚部w1。
[0335]
误差麦克风11将客厢3中的噪音检测为误差信号e,客厢3中的噪音是由主要由发动机2/驱动系统产生的具有频率f并到达误差麦克风11的振动噪音d与由扬声器12产生并到达误差麦克风11的抵消振动噪音y的合成而产生的抵消误差噪音。注意,由误差麦克风11检测到的噪音不仅包括上述抵消误差噪音,而且还包括来自发动机2/驱动系统以外的部件的噪音。误差信号e在a/d转换器76被转换成数字信号,然后被提供给虚拟误差信号产生单元80。
[0336]
从振动噪音估计信号产生单元28输出的误差麦克风11处的振动噪音估计信号d^
也被提供给虚拟误差信号产生单元80。此外,分别从第一自适应陷波校正滤波器单元60和第三自适应陷波滤波器70输出的到达误差麦克风11的抵消振动噪音y的第一估计值y^1和第二估计值y^2也被提供给虚拟误差信号产生单元80。
[0337]
虚拟误差信号产生单元80基于误差麦克风11处的误差信号e和振动噪音估计信号d^产生表观虚拟误差信号e'(第二虚拟误差信号e'1和第一虚拟误差信号e'2)。具体而言,虚拟误差信号产生单元80包括:构造成产生第二虚拟误差信号e'1的第二虚拟误差信号产生单元81;以及构造成产生第一虚拟误差信号e'2的第一虚拟误差信号产生单元82。
[0338]
在第二虚拟误差信号产生单元81中,误差信号e被提供给加法器83。此外,误差麦克风11处的振动噪音估计信号d^在其极性在第一极性反转电路84处反转之后被提供给加法器83。此外,抵消振动噪音y的第一估计值y^1在其极性在第二极性反转电路85处反转之后被提供给加法器83。加法器83将所提供的三个值相加在一起以产生第二虚拟误差信号e'1。第二虚拟误差信号e'1被提供给振动噪音估计信号产生单元28和第一自适应陷波校正滤波器单元60。
[0339]
在第一虚拟误差信号产生单元82中,误差麦克风11处的振动噪音估计信号d^被提供给加法器86。此外,抵消振动噪音y的第二估计值y^2被提供给加法器86。加法器86将所提供的两个值相加在一起以产生第一虚拟误差信号e'2。第一虚拟误差信号e'2被提供给第三自适应陷波滤波器70。
[0340]
由虚拟误差信号产生单元80产生的第二虚拟误差信号e'1和第一虚拟误差信号e'2可以由以下公式表示。
[0341][0342]
此处,r是参考信号(由标准余弦波信号xc和标准正弦波信号xs组成),*是滤波计算(在san滤波器中,对应于复数的乘法),并且n是采样时间。
[0343]
在振动噪音估计信号产生单元28中,滤波器系数更新单元52基于标准余弦波信号xc和第二虚拟误差信号e'1来计算第三自适应陷波校正滤波器51的滤波器系数(h^0),使得根据lms算法将第二虚拟误差信号e'1最小化。滤波器系数更新单元52在每个采样时间进行第三自适应陷波校正滤波器51的系数计算,以将第三自适应陷波校正滤波器51的滤波器系数(h^0)更新为计算值。另外,滤波器系数更新单元54基于标准正弦波信号xs和第二虚拟误差信号e'1来计算第四自适应陷波校正滤波器53的滤波器系数(h^1),使得根据lms算法将第二虚拟误差信号e'1最小化。滤波器系数更新单元54在每个采样时间进行第四自适应陷波校正滤波器53的系数计算,以将第四自适应陷波校正滤波器53的滤波器系数(h^1)更新为计算值。即,振动噪音估计信号产生单元28构成用于更新传递特性估计值h^的更新单元。
[0344]
在第一自适应陷波校正滤波器单元60中,滤波器系数更新单元62基于控制信号u0和第二虚拟误差信号e'1来计算第一自适应陷波校正滤波器61的滤波器系数(c^0),使得根据lms算法将第二虚拟误差信号e'1最小化。滤波器系数更新单元62在每个采样时间进行第一自适应陷波校正滤波器61的系数计算,以将第一自适应陷波校正滤波器61的滤波器系数(c^0)更新为计算值。此外,滤波器系数更新单元64基于控制信号u1和第二虚拟误差信号e'1来计算第二自适应陷波校正滤波器63的滤波器系数(c^1),使得根据lms算法将第二虚拟误差信号e'1最小化。滤波器系数更新单元64在每个采样时间进行第二自适应陷波校正滤波器63的系数计算,以将第二自适应陷波校正滤波器63的滤波器系数(c^1)更新为计算值。
即,第一自适应陷波校正滤波器单元60构成用于更新抵消声音传递特性估计值c^的更新单元。
[0345]
在第三自适应陷波滤波器70中,滤波器系数更新单元72基于第一参考信号r0和第一虚拟误差信号e'2来计算第一自适应陷波控制滤波器71的第一自适应陷波滤波器系数w0,使得根据lms算法将第一虚拟误差信号e'2最小化。滤波器系数更新单元72在每个采样时间进行第一自适应陷波控制滤波器71的系数计算,以将第一自适应陷波控制滤波器71的第一自适应陷波滤波器系数w0更新为计算值。此外,滤波器系数更新单元74基于第二参考信号r1和第一虚拟误差信号e'2来计算第二自适应陷波控制滤波器73的第二自适应陷波滤波器系数w1,使得根据lms算法将第一虚拟误差信号e'2最小化。滤波器系数更新单元74在每个采样时间进行第二自适应陷波控制滤波器73的系数计算,以将第二自适应陷波控制滤波器73的第二自适应陷波滤波器系数w1更新为计算值。即,第三自适应陷波滤波器70构成用于更新表示控制信号产生单元25的电路特性的自适应陷波滤波器系数w的更新单元。
[0346]
由第三自适应陷波滤波器70更新的第一自适应陷波滤波器系数w0和第二自适应陷波滤波器系数w1被提供给上述的控制信号产生单元25,并且第一自适应陷波控制滤波器31的第一自适应陷波滤波器系数w0和第二自适应陷波控制滤波器32的第二自适应陷波滤波器系数w1被顺序地更新。
[0347]
从而,由控制信号产生单元25进行了滤波的标准余弦波信号xc和标准正弦波信号xs被优化,从而由扬声器12基于控制信号u0产生的控制声音抵消作为来自发动机2/驱动系统的周期性噪音的振动噪音d,并且厢内噪音降低。
[0348]
这些自适应陷波滤波器(28、60、70)的滤波器系数(h^、c^、w)使用虚拟误差信号e
′
(e
′
1,e
′
2)通过lms算法进行更新,如下所示。
[0349][0350][0351]
w0
n 1
=w0
n
‑
μ
w
×
e2
n
×
cr
n
,w1
n 1
=w1
n
‑
μ
w
×
e2
n
×
ci
n
[0352]
在此,μ是用于调整每个自适应滤波器系数的更新量的步长参数。
[0353]
当作为前述自适应更新的结果,第二虚拟误差信号e
′
1和第一虚拟误差信号e
′
2收敛到最小值(0)时,以下联立方程成立。
[0354][0355][0356]
根据上面的公式(13),导出下面的公式(14)。
[0357][0358]
另外,根据上面的公式(14)和上面的公式(12),导出下面的公式(15)。
[0359][0360]
在这里,“/”是复数的除法。
[0361]
根据上面的公式(14)和上面的公式(15),导出下面的公式(16)。
[0362]
w
n
=
‑
h
n
/c
n
,
ꢀꢀ
(16)
[0363]
表示误差麦克风11的位置处的声压的误差信号e由以下公式表示。
[0364]
en=dn yn=m*hn m*wn*cn
[0365]
通过将上面的公式(15)代入该公式,可知e=0。
[0366]
因此,在该有源振动噪音降低系统10中,即使在传递特性估计值h^和抵消音传递特性估计值c^的真实值未知的情况下,也能够确保在第二虚拟误差信号e'1和第一虚拟误差信号e'2收敛到0的情况下,传递特性估计值h^与抵消声音传递特性估计值c^之比收敛到常数值,并且将滤波器系数提供给用作控制滤波器的控制信号产生单元25的第三自适应陷波滤波器70的自适应陷波滤波器系数w也收敛到最佳值
‑
h/c,并且误差麦克风11处的声压(误差信号e)被最小化。这意味着有源振动噪音降低系统10根据不需要预先识别从扬声器12到误差麦克风11的抵消声音的传递特性(声学特性c)的原理进行操作,并且即使在控制过程中用于抵消声音的声学特性c发生变化也可以执行噪音抵消。
[0367]
接下来,将描述根据该实施方式的有源振动噪音降低系统10的有利效果。图14是示出假设在图10中所示的有源振动噪音降低系统10中发生声学特性c的变化的曲线图。如图14中所示,在对应于从3000到4500rpm的发动机旋转速度的频带(100hz至150hz)中,声学特性c从实线所示的初始特性变为虚线所示的当前特性,并且假设作为控制参数的抵消声音传递特性估计值c^与实际的声学特性c之间存在差异。
[0368]
在这种条件下,当根据本实施方式的有源振动噪音控制器13执行噪音降低控制时,降低了发动机消声声音的声压级,如图15中所示。图15示出了如下情况下的声音级:控制关闭时;如传统实施例中那样执行根据引入稳定系数α的方法的稳定性改善控制时;以及执行本发明的第一实施方式的控制时。如图15中所示,在实际声学特性c变化的3000至4500rpm的发动机旋转速度区域中,在传统实施例中,控制性能明显恶化,导致在3800rpm附近的声级增加约15db。与之相比,在本发明中,在控制过程中,可以跟随实际声学特性c的变化,使得即使当实际声学特性c发生重大变化时,也不会发生显著的性能劣化,并且实现了约10db的噪音抵消。在声学特性c不变的区域中,本发明和传统实施例表现出相似的性能。关于初始收敛,本发明比传统实施例慢,但是收敛时间非常短,并且一旦实现收敛,此后就可以维持噪音抵消效果,因此实践上是没有问题的。
[0369]
如上所述,在有源振动噪音控制器13中,标准信号产生单元21基于发动机2/驱动系统信号x(发动机2/驱动系统的与操作相关的信息)来估计从作为振动噪音源的发动机/驱动系统发出的振动噪音d的频率f,因此产生与振动噪音d同步的标准信号x(xc,xs)。此外,虚拟误差信号产生单元80通过使用到达误差麦克风11的误差信号e和振动噪音估计信号d^来产生虚拟误差信号e'。此外,振动噪音估计信号产生单元28根据使用虚拟误差信号e'的自适应算法顺序地更新滤波器系数。因此,即使未提供用于检测标准信号x的麦克风或振动传感器且无法准确地识别从振动噪音源传递来的振动噪音d的传递特性h,并且即使振动噪音d的传递特性h发生变化时,有源振动噪音控制器13也可以通过抵消振动噪音y来降低噪音。另外,由于不需要麦克风和振动传感器,因此有源振动噪音控制器13的构造变得简单,此外噪音不进入标准信号x(xc,xs),从而可以实现优异的噪音抵消性能。
[0370]
此外,在本实施方式中,振动噪音估计信号产生单元28由san滤波器而不是fir滤
波器构成,并且使用自适应算法顺序地更新滤波器系数。因此,即使对于特性总是变化的振动噪音d,也可以确保噪音抵消性能,此外其计算量小并且不需要具有高处理性能的昂贵的处理器,由此可以以低成本构造具有优异噪音抵消性能的有源振动噪音降低系统10。
[0371]
此外,在有源振动噪音控制器13中,标准信号校正单元26用表示控制信号产生单元25的电路特性的自适应陷波滤波器系数w校正标准信号x(xc,xs)以产生控制信号u0,并且第一自适应陷波校正滤波器单元60用抵消声音传递特性估计值c^校正控制信号u0,以产生误差麦克风11处的抵消振动噪音y的第一估计值y^1。另外,参考信号产生单元27用抵消声音传递特性估计值c^校正标准信号x(xc,xs),以产生参考信号r(r0,r1),并且具有提供给控制信号产生单元25的自适应陷波滤波器系数w(w0,w1)的第三自适应陷波滤波器70用自适应陷波滤波器系数w校正参考信号r,以产生误差麦克风11处的抵消振动噪音y的第二估计值y^2。另外,虚拟误差信号产生单元80通过使用抵消振动噪音y的第一估计值y^1和第二估计值y^2产生虚拟误差信号e',并且第一自适应陷波校正滤波器单元60和第三自适应陷波滤波器70使用虚拟误差信号e'根据自适应算法依次更新相应的滤波器系数。
[0372]
具体而言,在虚拟误差信号产生单元80中,第二虚拟误差信号产生单元81基于误差信号e、振动噪音估计信号d^和抵消振动噪音y的第一估计值y^1产生第二虚拟误差信号e'1,而第一虚拟误差信号产生单元82基于第二虚拟误差信号e'1和抵消振动噪音y的第二估计值y^2来产生第一虚拟误差信号e'2。然后,振动噪音估计信号产生单元28基于标准信号x(xc,xs)和第二虚拟误差信号e'1更新滤波器系数,第一自适应陷波校正滤波器单元60基于控制信号u0和第二虚拟误差信号e'1更新滤波器系数,并且第三自适应陷波滤波器70基于参考信号r(r0,r1)和第一虚拟误差信号e'2更新滤波器系数。
[0373]
因此,即使在控制过程中用于从扬声器12到误差麦克风11的抵消声音的传递特性(声学特性c)发生显著变化,三个自适应陷波滤波器(28、60、70)也通过利用使用虚拟误差信号e'的自适应算法来顺序地更新滤波器系数,从而获得优异的噪音抵消性能。即,由于有源振动噪音控制器13根据基于虚拟误差信号e'自适应地更新san滤波器的系数的上述控制方法执行噪音降低控制,因此可以实现这样的有源振动噪音降低系统10,该有源振动噪音降低系统10不需要预先识别声学特性c,但是即使在控制过程中声学特性c发生显著变化时,也可以跟随声学特性c的变化以表现优异的噪音抵消性能。另外,由于有源振动噪音控制器13使用由san滤波器而不是fir滤波器构成的自适应陷波滤波器,因此计算量小并且不需要高性能处理器,从而可以以低成本实现有源振动噪音降低系统10。
[0374]
另外,在本实施方式中,即使由于座椅的位置或角度的调整而在声学特性c方面发生显著变化,也可以在不劣化噪音抵消性能的情况下执行噪音降低控制,从而能够在靠近车辆乘员的耳朵等的头枕上放置误差麦克风11以极大提高车辆乘员的耳朵附近的噪音抵消效果。
[0375]
由于噪音源是包括在发动机2或作为车辆1的驱动源的驱动系统中的旋转体,因此振动噪音d的频率f具有窄频带,并且有源振动噪音降低系统10能够降低振动噪音d而不会失败。
[0376]
《第二实施方式》
[0377]
接下来,将参考图16至图18描述本发明的第二实施方式。注意,与第一实施方式相同或相似的元件将由相同的附图标记表示,并且将省略冗余的描述。
[0378]
图16是根据第二实施方式的有源振动噪音降低系统10的功能框图。如图16中所示,本实施方式的有源振动噪音降低系统10与第一实施方式的不同之处在于,本实施方式的有源振动噪音降低系统10另外包括相位提取单元90。在下文中,将具体地进行描述。
[0379]
在由第一实施方式的有源振动噪音控制器13进行的控制方法中,第一自适应陷波校正滤波器单元60对应于用于从扬声器12到误差麦克风11的抵消声音的传递特性(声学特性c)的估计值(抵消声音传递特性估计值c^),因此其滤波器系数的幅值根据频率f而变化。如果抵消声音传递特性估计值c^较小,则在向控制信号产生单元25提供滤波器系数的第三自适应陷波滤波器70的更新中使用的第一校正参考信号r0和第二校正参考信号r1变小,并且第三自适应陷波滤波器70的收敛变慢。此外,由于包括具有自适应陷波滤波器系数w的控制信号产生单元25的标准信号校正单元26的输出也用于第一自适应陷波校正滤波器单元60的更新,因此第一自适应陷波校正滤波器单元60本身的收敛变慢。另一方面,在抵消声音传递特性估计值c^是较大值的频带中,第三自适应陷波滤波器70和第一自适应陷波校正滤波器单元60的收敛快,但是每次更新的更新量大,因此控制趋于不稳定。
[0380]
因此,为了提高第一实施方式的控制方法的收敛性能,本实施方式的有源振动噪音控制器13另外包括相位提取单元90,以使用抵消声音传递特性估计值c^的相位信息来进行滤波器系数的更新,而不取决于抵消声音传递特性估计值c^的幅值。
[0381]
如下面的公式中所示,除了振动噪音估计信号产生单元28之外,第一自适应陷波校正滤波器单元60和第三自适应陷波滤波器70也根据根据与第一实施方式相同的公式更新滤波器系数(h^、c^、w),相位提取单元90将抵消声音传递特性估计值c^归一化。即,通过将抵消声音传递特性估计值c^的实部c^0和虚部c^1乘以实部c^0和虚部c^1的平方和的平方根的乘法逆,相位提取单元90分别计算第一和第二归一化滤波器系数。
[0382][0383][0384][0385]
w0
n 1
=w0
n
‑
μ
w
×
e2
n
×
cr
n
,w1
n 1
=w1
n
‑
μ
w
×
e2
n
×
ci
n
[0386]
在这里,“||”表示复数的振幅。而且,为了减少计算量,可以代替抵消声音传递特性估计值c^的振幅,而使用抵消声音传递特性估计值c^的实部c^0和虚部c^1的绝对值中较大的一者。
[0387][0388]
参考信号产生单元27通过使用由相位提取单元90使用以上公式归一化的抵消声音传递特性估计值c^对标准信号x(xc,xs)进行校正,以产生参考信号r(r0,r1)。然后,通过使用参考信号r(r0、r1),第三自适应陷波滤波器70产生抵消振动噪音y的第二估计值y^2。此外,第一自适应陷波校正滤波器单元60在为下一次采样更新抵消声音传递特性估计值c^时,使用由相位提取单元90归一化的抵消声音传递特性估计值c^。
[0389]
在有源振动噪音控制器13执行这样的控制的情况下,与第一实施方式相比,第二实施方式的有源振动噪音降低系统10表现出高噪音抵消性能。具体而言,第一自适应陷波校正滤波器单元60通过使用与从扬声器12到误差传声器11的抵消声音的传递特性(声学特
性c)的估计值相对应的第一自适应陷波校正滤波器单元60的相位信息来更新滤波器系数,由于这样的控制,因此与第一实施方式的控制方法相比,收敛性能提高。稍后将描述关于噪音抵消性能的细节。
[0390]
每个自适应陷波滤波器(28、60、70)均从预先设定的初始值(诸如0之类的较小值)开始对其滤波器系数(h^、c^、w)进行自适应更新,因此,为了实现从初始值到最佳值的快速收敛,必须使每次更新的更新量大。从这个角度看,步长参数μ应设定为较大值。然而,当步长参数μ设定为较大值时,适应过程往往不稳定。因此,收敛速度和稳定性是一种折中关系。
[0391]
因此,为了提高第一实施方式的控制方法的初始收敛速度,优选的是,每个自适应陷波滤波器(28、60、70)均根据滤波器系数的幅值改变步长参数μ。每个自适应陷波滤波器(28、60、70)均根据类似于第一实施方式的公式更新滤波器系数(h^、c^、w),但如下面的公式所示,增加了将各更新公式的步长参数μ乘以滤波器振幅的乘法逆的计算。
[0392][0393][0394][0395]
w0
n 1
=w0
n
‑
μ
wnn
×
e2
n
×
cr
n
,w1
n 1
=w1
n
‑
μ
wnn
×
e2
n
×
ci
n
[0396][0397]
通过将步长参数μ乘以滤波器振幅的乘法逆,在自适应过程的早期,步长参数μ增大,收敛速度变快。随着各个自适应陷波滤波器(28、60、70)的滤波系数(h^、c^、w)的收敛,步长参数μ也变小,并收敛到常数值。因此,在不影响稳定性的情况下,自适应过程的初始收敛性得到改善。
[0398]
另外,为了减少计算量,自适应陷波滤波器(28、60、70)可以代替使用滤波器振幅而分别使用自适应陷波滤波器系数w的第一自适应陷波滤波器系数w0(实部)和第二自适应陷波滤波器系数w1(虚部)的绝对值中较大的一者、传递特性估计值h^的实部h^0和虚部h^1的绝对值中较大的一者以及抵消声音传递特性估计值c^的实部c^0和虚部c^1的绝对值中较大的一者(如以下公式所示)。
[0399][0400]
|w|
n 1
≈max(|w0
n 1
|,|w1
n 1
|)
[0401]
此外,为了提高初始收敛速度,并且同时确保最小的稳定性,每个自适应陷波滤波器(28、60、70)可以限制步长参数μ的最大值。以用于振动噪音估计信号产生单元28的更新的步长参数μh的计算为例,其可以用下面的语句表示。
[0402][0403]
类似地,第一自适应陷波校正滤波器单元60可以限制用于更新的步长参数μc的最大值,并且第三自适应陷波滤波器70可以以类似于以上语句的方式限制用于更新的步长参数μw的最大值。
[0404]
在有源振动噪音控制器13利用如上所述的可变步长参数μ执行控制时,与第一实
施方式相比或者与步长参数μ为固定值时相比,第二实施方式的有源振动噪音降低系统10表现出高噪音抵消性能。
[0405]
接下来,将描述根据本实施方式的有源振动噪音控制器13的有利效果。与第一实施方式类似,假设声学特性c如图14中所示变化。图17是示出在这种情况下发动机消音声音的声压级的曲线图。图17示出了在控制关闭时、在执行第一实施方式的控制时和在第二实施方式的控制时(步长参数μ固定)的声压级。如图17中所示,在声学特性c变化的3000至4500rpm的发动机旋转速度区域中,第二实施方式的有源振动噪音降低系统10可以与第一实施方式类似地跟随声学特性c的变化,从而达到10db以上的噪音抵消效果。
[0406]
另外,在第二实施方式的有源振动噪音降低系统10中,与第一实施方式相比,在整个频带内的收敛性能有所提高。特别地,可以看出,在低旋转速度侧(低频率侧),与第一实施方式相比,第二实施方式的有源振动噪音降低系统10的噪音抵消性能提高5db以上。根据上述情况,可以确信第二实施方式的有源振动噪音降低系统10的效果。
[0407]
图18是示出在有源振动噪音控制器13使步长参数μ可变的情况下,发动机消音声音的声压级的曲线图。图18是示出了在控制关闭时、在步长参数μ固定的情况下执行根据第二实施方式的控制时以及在步长参数μ可变的情况下执行根据第二实施方式的控制时的声压级。如图18中所示,在声学特性c变化的3000至4500rpm的发动机旋转速度区域中,在步长参数μ可变的情况下执行控制的第二实施方式的有源振动噪音降低系统10能够跟随声学特性c的变化,并且达到10db以上的噪音抵消效果。
[0408]
此外,与步长参数μ固定的情况相比,以可变步长参数μ执行控制的第二实施方式的有源振动噪音降低系统10提高了收敛性能。特别地,在自适应过程的早期阶段,在高达2000rpm的区域中,与步长参数μ固定的情况相比,噪音抵消性能提高了约10db。根据上述情况可以确信,通过对用于自适应更新的步长参数μ进行归一化,自适应更新的初始收敛速度较第一实施方式的控制方法有所提高。
[0409]
另外,在本实施方式中,有源振动噪音控制器13还包括相位提取单元90,该相位提取单元90构造成提取与抵消声音传递特性估计值c^相对应的滤波系数的相位,并且参考信号产生单元27用提取的相位而不是用抵消声音传递特性估计值c^来校正标准信号x(xc,xs)。因此,降低了抵消声音传递特性估计值c^的振幅特性对滤波器系数更新量的影响,由此与第一实施方式的控制方法相比,自适应更新的收敛性能得到改善。换句话说,抵消声音传递特性估计值c^具有振幅分量和相位分量,并且如果振幅分量的变化量变大,则抵消声音传递特性估计值c^的变化量也变大。另外,存在特定的频带,在这个频带中,由于频率f的变化,抵消声音传递特性估计值c^的振幅分量变化相当大,并且当在这个频带中时,抵消声音传递特性估计值c^变化明显。因此,当在该频带中时,滤波器系数的更新量变大,并且自适应更新的收敛性能可能降低。在本实施方式中,从抵消声音传递特性估计值c^中提取相位(分量),用该相位对标准信号x进行校正,从而抑制滤波器系数的更新量,并且提高自适应更新的收敛性能。
[0410]
另外,振动噪音估计信号产生单元28、第一自适应陷波校正滤波器单元60和第三自适应陷波滤波器70通过将步长参数μ乘以自适应陷波滤波器振幅的乘法逆来归一化用于调整每次采样的滤波器系数更新量的步长参数μ,并利用归一化的步长参数μ更新相应的滤波器系数(h^、c^、w)。因此,每次采样的滤波系数更新量自动调整,从而自适应更新的初始
收敛性能较第一实施方式的控制方法有所提高,而不影响控制稳定性。
[0411]
前文已经描述了本发明的具体实施方式,但本发明不限于上述实施方式,并且可以以各种方式进行变型或改变。例如,在上述描述的实施方式中,有源振动噪音降低系统10具有作为实施例的图10中所示的构造,但有源振动噪音降低系统10可以具有图11或图12中所示的构造。在这些情况下,通过将“抵消声音”替换为“抵消振动”来适用以上描述。此外,各构件或部分的具体结构、布置、数量等以及具体的公式和程序在本发明的范围内也可以适当变化。上述各实施方式可以酌情进行组合。另外,上述实施方式中所示的部件不一定都是不可缺少的,可以酌情有选择地采用这些部件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

