1.本技术涉及交通领域,特别涉及一种语音交互方法、语音交互装置、语音交互系统、交通工具及计算机可读存储介质。
背景技术:
2.在自动导航辅助驾驶(navigation guided pilot,ngp)下,自动驾驶环境模拟显示中,只能支持手势拖动地图,并不能支持切换地图视角。如用户需要切换地图视角,需要先退出到传统车载导航的标准地图界面下,再进行相应的选择操作,但是在车辆行驶过程中,分心用手去操作地图以进行地图视角调整不便且不安全。
技术实现要素:
3.有鉴于此,本技术实施方式提供了一种语音交互方法、语音交互装置、语音交互系统、交通工具及计算机可读存储介质。
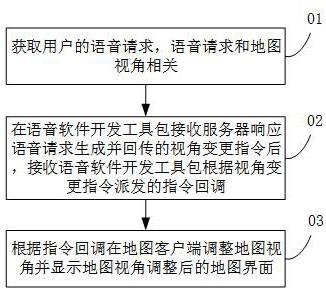
4.本技术提供了一种语音交互方法,用于交通工具,所述交通工具与服务器通信,所述交通工具的地图客户端预置有语音软件开发工具包,所述语音交互方法包括:获取用户的语音请求,所述语音请求和地图视角相关;在所述语音软件开发工具包接收所述服务器响应所述语音请求生成并回传的视角变更指令后,接收所述语音软件开发工具包根据视角变更指令派发的指令回调;和根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界面。
5.在某些实施方式中,所述根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界面,包括:根据所述指令回调在所述地图客户端调整所述地图界面的维度、地图方向和俯仰角;调整所述地图界面的维度、地图方向和俯仰角后,调整所述地图界面的自车纹理。
6.在某些实施方式中,所述根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界面,包括:根据所述指令回调在所述地图客户端调整所述地图界面的维度、地图方向和俯仰角;调整所述地图界面的维度、地图方向和俯仰角后,在所述地图客户端呈现人机界面。
7.在某些实施方式中,所述获取用户的语音请求,所述语音请求和地图视角相关,包括:当前所述地图客户端以环境模拟显示方式呈现时,获取用户的所述语音请求。
8.在某些实施方式中,所述根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界面,包括:
控制所述地图客户端以订阅的方式注册并监听所述语音软件开发工具包的所述指令回调;在监听到所述指令回调的情况下,根据所述指令回调在所述地图客户端调整地图视角。
9.在某些实施方式中,所述根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界面,包括:响应所述指令回调以将所述指令回调转换为语音控制事件;将所述语音控制事件转换生成设置命令;执行所述设置命令以调整所述地图视角并显示所述地图视角调整后的所述地图界面。
10.在某些实施方式中,在响应所述指令回调以将所述指令回调转换为语音控制事件后,所述根据所述指令回调在所述地图客户端调整地图视角并显示所述地图视角调整后的地图界面,还包括:当前所述地图客户端以自动驾驶环境模拟显示方式呈现时,生成退出自动驾驶环境模拟显示命令;根据所述退出自动驾驶环境模拟显示命令控制所述地图客户端退出自动驾驶环境模拟显示以显示地图界面。
11.在某些实施方式中,所述语音交互方法还包括:将所述语音请求发送至所述服务器,以使所述服务器在所述语音请求与所述地图视角相关的情况下,响应于所述语音请求将所述语音请求在预设知识库中进行匹配并在匹配命中的情况下生成所述视角变更指令;通过所述语音软件开发工具包接收所述服务器回传的所述视角变更指令。
12.本技术还提供了一种语音交互装置,用于交通工具,所述交通工具与服务器通信,所述交通工具的地图客户端预置有语音软件开发工具包,所述语音交互装置包括:获取模块,用于获取用户的语音请求,所述语音请求和地图视角相关;生成模块,用于在所述语音软件开发工具包接收所述服务器响应所述语音请求生成并回传的视角变更指令后,接收所述语音软件开发工具包根据所述视角变更指令派发的指令回调;控制模块,用于根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界。
13.本技术还提供了一种所述语音交互系统,包括交通工具及服务器,所述交通工具包括地图客户端,所述地图客户端预置有语音软件开发工具包;所述地图客户端用于获取用户的语音请求,并通过所述语音软件开发工具包将所述语音请求传输至所述服务器,所述语音请求和地图视角相关;所述服务器用于接收所述交通工具的语音请求,并根据所述语音请求生成视角变更指令,以及将所述视角变更指令发送至所述交通工具;所述地图客户端还用于在所述语音软件开发工具包接收所述视角变更指令后,接收所述语音软件开发工具包根据所述视角变更指令派发的指令回调,并根据所述指令回调在所述地图客户端调整所述地图视角并显示所述地图视角调整后的地图界面。
14.本技术还提供了一种交通工具,所述交通工具包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述任一项所述的语音交互方法。
15.本技术还提供一种计算机程序的非易失性计算机可读存储介质,当所述计算机程序被一个或多个处理器执行时,实现上述任一项实施例中所述的语音交互方法。
16.本技术通过预先在交通工具的地图客户端预置有语音软件开发工具包,在获取到有关地图视角的语音请求时,可将语音请求传输至服务器,服务器接收到语音请求后响应,对语音请求进行语义识别,从而生成视角变更指令,并将视角变更指令回传给语音软件开发工具包,由语音软件开发工具包根据视角变更指令派发的指令回调,并根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。如此,实现了通过语音输入来对地图视角的切换从而显示与语音请求对应的地图界面。
17.本技术实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
18.本技术的上述和/或附加的方面和优点可以从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:图1是本技术某些实施方式的语音交互方法的流程示意图;图2是本技术某些实施方式的语音交互装置的模块示意图;图3是本技术某些实施方式的步骤03的子步骤流程示意图;图4是本技术某些实施方式的地图客户端的场景示意图;图5是本技术某些实施方式的步骤03的子步骤的又一流程示意图;图6是本技术某些实施方式的步骤03的子步骤的再一流程示意图;图7是本技术某些实施方式的步骤03的子步骤的再一流程示意图;图8是本技术某些实施方式的地图客户端在自动驾驶环境模拟显示下的场景示意图;图9是本技术某些实施方式的语音交互方法的又一流程示意图;图10是本技术某些实施方式的语音交互方法的再一流程示意图。
具体实施方式
19.下面详细描述本技术的实施方式,实施方式的示例在附图中示出,其中,相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术的实施方式,而不能理解为对本技术的实施方式的限制。
20.ngp自动导航辅助驾驶,指车辆可以基于用户设定的导航路线,实现从a点到b点的自动导航辅助驾驶。ngp功能覆盖了自动超车、自动限速调节、最优车道选择、自动切换高速公路、自动上下匝道、变道自动紧急避让等使用场景,并可以在交通锥识别与避让、大货车规避、夜间超车提醒、故障车辆避让、拥堵道路超级跟车等中国道路场景上实现较好的表现。而这一切的实现,除了依靠技术方案的开发能力外,能够实现人机共导的第三代导航也
不可或缺,该导航可以为ngp提供更精准的道路信息,来优化自动驾驶辅助的体验。
21.ngp作为高级别的自动驾驶辅助能力,相比于普通车机车载导航来说,对能够实现人机共导的第三代导航会有更多要求与标准,包括完整性、丰富性、人机交互、高精度、新鲜度、可靠性、可导航、可定位等方面,并在覆盖度上也有更高要求。
22.在此基础上,将自动驾驶感知、定位系统、高精度地图、高清渲染画面进行融合模拟显示,形成在量产车中搭载的“sr自动驾驶环境模拟显示”功能。在ngp使用时,环境模拟显示能够展现人或车驾驶的边界和责任划分,并通过准确的风险场景识别以及清晰的分级接管提醒,让驾驶员明确知道自己何时需要接管车辆。同时,该功能还融合了动态交通数据及环境感知数据,包括了实时的交通信息、车道级路况、事件信息服务、交通预测等信息的实时反馈,为用户带来体验更佳的车道级自动导航能力。
23.但是在环境模拟显示中进行一些操作,则会退出到传统车载导航的标准地图界面。
24.请参阅图1,本技术提供了一种语音交互方法,用于交通工具,交通工具的地图客户端预置有语音软件开发工具包,语音交互方法包括:01:获取用户的语音请求,语音请求和地图视角相关;02:在语音软件开发工具包接收服务器响应语音请求生成并回传的视角变更指令后,接收语音软件开发工具包根据视角变更指令派发的指令回调;03:根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。
25.相应地,请参阅图2,本技术实施方式还提供了一种语音交互装置100,本技术实施方式的语音交互方法可以由语音交互装置100实现。
26.语音交互装置100包括获取模块110、生成模块120和控制模块130。步骤01可以由获取模块110实现,步骤02可以由生成模块120实现,步骤03可以由控制模块130实现。或者说,获取模块110用于获取用户的语音请求,语音请求和地图视角相关。生成模块120用于在语音软件开发工具包接收服务器响应语音请求生成并回传的视角变更指令后,接收语音软件开发工具包根据视角变更指令派发的指令回调。控制模块130用于根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。
27.本技术实施方式还提供了一种交通工具。交通工具包括存储器和处理器。存储器中存储有计算机程序。处理器用于获取用户的语音请求,语音请求和地图视角相关。处理器用于在语音软件开发工具包接收服务器响应语音请求生成的视角变更指令后,接收语音软件开发工具包根据视角变更指令派发的指令回调。处理器用于根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。
28.本技术的语音交互方法、语音交互装置和交通工具中,通过预先在交通工具的中控系统中预置有语音软件开发工具包,在交通工具获取到有关地图视角的语音请求时,可通过语音软件开发工具包将语音请求传输至服务器,服务器接收到语音请求后响应,从而生成与语音请求相关的视角变更指令,并将视角变更指令回传给语音软件开发工具包,进而在语音软件开发工具包接收视角变更指令后,接收语音软件开发工具包根据视角变更指令派发的指令回调,并根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。如此,用户可通过语音输入来实现对地图界面中地图视角切换,从而生成并显示
地图视角调整后的地图界面。
29.具体地,交通工具包括具有图形用户界面显示的屏幕,以及可进行语音交互的语音识别设备。交通工具可包括车辆、飞行汽车、高速列车等交通工具。以车辆为例,车辆包括显示区域、电声元件、通信元件和处理器。车辆的显示区域可以包括仪表屏、车载显示区域屏幕以及车辆挡风玻璃上可以实现的抬头显示等。车辆上运行的中控系统使用图形用户界面(graphical user interface,gui)为用户呈现展示的内容。显示区域包括诸多ui元素,不同的显示区域可以展示相同或不同的ui元素。其中,ui元素可以包括卡片对象、应用程序图标或界面、文件夹图标、多媒体文件图标以及用于进行交互可操作的控件等。电声元件可以用于采集用户的语音请求。中控系统可以通过通信元件发送语音请求至服务器,并通过通信元件接收服务器根据语音请求生成的操作指令。处理器用于执行与操作指令对应的操作。
30.以下为便于描述,以车辆为例进行实施例展开。
31.具体地,在车辆的中控系统中预置有语音软件开发工具包,其中,中控系统可以设置有地图客户端,地图客户端是指车载地图导航应用程序。地图客户端运行时,可在车辆的显示区域实时显示地图客户端的地图界面的导航场景信息。软件开发工具包(software development kit,sdk)是指实现产品软件某项功能而开发的工具包。地图界面的导航场景信息可通过语音软件开发工具包同步至服务器,语音软件开发工具包是车辆与服务器进行语音交互的枢纽。一方面语音软件开发工具包定义了语音请求的生成规范。另一方面,语音软件开发工具包能够实现将车辆中的地图界面的导航场景信息同步到服务器,并将服务器针对语音请求生成的操作指令传输到地图客户端。
32.地图客户端可在项目工程中build.gradle中引入语音软件开发工具包,引用方式为:api(project.getdependency('com.xiaopeng,lib:lib speech protocol:1.16.0
‑
snapshot')){changing=true}在车辆以自动导航辅助驾驶(navigation guided pilot,ngp)方式行驶过程中,并且,在地图客户端运行的导航场景为自动驾驶环境模拟显示(sr)下,若需要对地图客户端中的地图视角进行调整时,需要从环境模拟显示退出,变成传统标准地图,然后在传统标准地图中以触摸点击对应控件的方式完成地图视角调整的操作,地图客户端可通过语音软件开发工具包获取用户的语音请求,也即是,当地图界面的导航场景信息为环境模拟显示时,地图客户端可通过语音软件开发工具获取用户与地图视角相关的语音请求。
33.在某些实施方式中,步骤01具体包括:当前地图客户端以环境模拟显示方式呈现时,获取用户的语音请求。
34.由于,语音请求和地图视角相关,在地图客户端为自动驾驶环境模拟显示时,语音软件开发工具包获取与地图视角相关的语音请求,通过语音的方式可减少用户手动操作。
35.例如,车辆进行自动导航辅助行驶的过程中,且在地图客户端处于自动驾驶环境模拟显示的导航场景中,若用户希望切换到3d地图的导航场景中,用户发出“打开3d地图”的语音请求,地图客户端可通过语音软件开发工具获取到用户的语音请求“打开3d地图”。
36.进而,地图客户端在获取到用户的语音请求后,可以通过语音软件开发工具传输至服务器,由服务器响应语音请求,生成视角变更指令。
37.可以理解,对于地图客户端而言,对于自动驾驶环境模拟显示下的导航场景,用户仅能通过在导航场景的图形用户界面中的输入,例如点击等输入将当前显示的自动驾驶环境模拟显示退出至地图界面,再在地图界面下,进行语音交互,从而实现对地图视角的切换。而对于当前正处于行车模式的情况,用户一边驾车一边以触摸点击的方式通过地图客户端的图形用户界面进行交互,存在一定的安全风险。
38.在一些实施方式中,地图客户端还可通过语音软件开发工具包将导航场景信息与语音请求一起发送至服务器。导航场景信息可以让服务器在进行语音识别和语义解析时,更加明确车辆当前所处的交互场景,有效地限缩了语义解析的范围。可理解,若服务器没有同步获取导航场景信息,在语义解析时,可能生成与视角变更指令存在偏差的指令。而在同步获取导航场景信息情况下,服务器就可以判断用户是希望变更地图视角。如此,可以提高语音控制的智能性与命中真实意图的成功率,用户体验更佳。
39.进一步地,在服务器根据语音请求生成对应的视角变更指令后,可将视角变更指令回传至语音软件开发工具包。语音软件开发工具包在接收到视角变更指令后,根据视角变更指令派发对应的指令回调。
40.地图客户端通过语音软件开发工具包接收服务器根据视角变更指令派发的指令回调后,可响应指令回调,而在地图客户端的地图界面调整地图视角,并显示调整地图视角后的地图界面。视角调整的指令回调可包括2d地图正北向上、2d地图车头朝上以及3d地图车头向上在内的任意一种指令回调。其中,2d地图正北向上的指令回调用于在地图客户端将地图视角调整为2d地图正北向上,此时,2d地图的正上指向方向始终为正北方,车辆前进方向随行进轨迹变化。2d地图车头朝上的指令回调用于在地图客户端将地图视角调整为2d地图车头朝上,此时,车辆行进方向始终为2d地图的正上指向方向,2d地图的方位指向随车辆行进轨迹变化。3d地图车头向上的指令回调用于在地图客户端将地图视角调整为3d地图车头向上,此时,车辆行进方向始终为3d地图的正上指向方向,2d地图的方位指向随车辆行进轨迹变化。
41.需要说明的是,2d是指地图界面呈平面图,也即是,在地图界面用平面图形抽象表示公路、建筑等。3d是指地图界面呈立体图,也即是,在地图界面用立体图形表示建筑物、公路等。
42.此外,本技术中,驾驶员可以在行车过程中的任意时刻,例如行驶或驻车状态,均可与地图客户端进行语音交互。特别是在行车状态中,采用语音输入代替了用户通过手动输入与地图客户端进行交互,更能兼顾行车安全。
43.优选地,请参阅图3,在某些实施方式中,步骤03包括:031:控制地图客户端以订阅的方式注册并监听语音软件开发工具包的指令回调;032:在监听到指令回调的情况下,根据指令回调在地图客户端调整地图视角。
44.在某些实施方式中,子步骤031和032可以由控制模块130来实现。或者说,控制模块130用于控制地图客户端以订阅的方式注册并监听语音软件开发工具包的指令回调,以及用于在监听到指令回调的情况下,根据指令回调在地图客户端调整地图视角。
45.在某些实施方式中,处理器用于控制地图客户端以订阅的方式注册并监听语音软
件开发工具包的指令回调,并在监听到指令回调的情况下,根据指令回调在地图客户端调整地图视角。
46.在子步骤031中,地图客户端可通过订阅的方式来注册并监听语音软件开发工具包的指令回调,订阅方式方法如下:private absnavilistener mnavilistener=new navilisteneriimpl(navimodel:this);//全局语音处理speechuntils.subscribe(navinode.class,mnavilistener)在地图客户端监听到语音软件开发工具包根据视角变更指令派发的指令回调的情况下,响应指令回调,根据指令回调在地图客户端调整地图视角。
47.请结合图4,例如,在一些示例中,语音软件开发工具包根据视角变更指令并进行转换得到的指令回调为“2d地图正北向上”,若地图客户端监听到语音软件开发工具包派发的"2d地图正北向上"的指令回调,则可根据"2d地图正北向上"的指令回调在地图客户端将地图界面的地图视角调整为2d地图正北向上。
48.优选地,请参阅图5,在某些实施方式中,步骤03还包括:033:根据指令回调在地图客户端调整地图界面的维度、地图方向和俯仰角;034:调整地图界面的维度、地图方向和俯仰角后,调整地图界面的自车纹理;和/或035:调整地图界面的维度、地图方向和俯仰角后,在地图客户端呈现人机界面(human machine interface,hmi)。
49.在某些实施方式中,子步骤033
‑
035可以由控制模块130来实现。或者说,控制模块130用于根据指令回调在地图客户端调整地图界面的维度、地图方向和俯仰角,并调整地图界面的维度、地图方向和俯仰角后,调整地图界面的自车纹理,和/或调整地图界面的维度、地图方向和俯仰角后,在地图客户端呈现人机界面。
50.在某些实施方式中,处理器用于根据指令回调在地图客户端调整地图界面的维度、地图方向和俯仰角,并调整地图界面的维度、地图方向和俯仰角后,调整地图界面的自车纹理,和/或,调整地图界面的维度、地图方向和俯仰角后,在地图客户端呈现人机界面。
51.请进一步地结合图4,具体地,地图视角调整可包括但不限于基础地图呈现调整和自车纹理调整。其中,基础地图呈现调整可包括但不限于维度、地图方向以及俯仰角等方面的调整。
52.维度调整是指地图界面在2d维度视角与3d维度视角之间的切换。例如,地图界面从2d维度视角下切换到3d维度视角。并且,在根据“2d地图正北向上”或“2d地图车头朝上”的指令回调进行地图视角调整时,会将地图界面切换至2d维度视角。在根据“3d地图车头向上”的指令回调进行地图视角调整时,会将地图界面切换至3d维度视角。
53.地图方向调整可包括2d地图正北向上调整和2d地图车头朝上调整,其中,2d地图正北向上调整是指将地图界面在2d维度视角下的地图方向切换至正北向上(例如图4)。2d地图车头朝上调整是指将地图界面在2d维度视角下的方向切换至车头朝上。
54.俯仰角调整是指对地图界面的俯仰角进行调节。可以理解,在3d地图中,俯仰角大于零,在2d地图中,俯仰角为零。也即是,在根据“3d地图车头向上”的指令回调进行地图界面调整时,地图界面的俯仰角大于零,在根据“2d地图正北向上”或“2d地图车头朝上”的指
令回调进行地图界面调整时,地图界面的俯仰角等于零。
55.自车是指在地图界面表征当前用户驾驶的车辆,自车纹理是指地图界面根据视角的不同做不同的显示呈现。例如,在视角为2d地图车头向上时,自车纹理为显示为2d车头朝上。
56.人机界面可包括视角控件显示调整、hmi弹出框提醒。视角控件显示调整是指视角控件会根据地图视角的不同做不同的显示呈现。hmi弹出框是指在地图视角的不同做不同的弹出框显示呈现,例如,在地图界面切换至地图正北时,则hmi弹出框显示为2d正北向上,又例如,在2d地图中车头朝上时,则弹出框可以为2d车头向上。在3d地图时,则弹出框可以为:已切换为3d车头向上。
57.如此,根据用户语音想要表达的地图视角调整需求,在无需用户以触控方式操作的情况下,完成包括基础地图呈现调整、自车纹理调整、人机界面呈现等在内的地图显示控制。
58.优选地,请参阅图6,在某些实施方式中,步骤03包括:036:响应指令回调以将指令回调转换为语音控制事件;037:将语音控制事件转换生成设置命令;038:执行设置命令以调整地图视角并显示地图视角调整后的地图界面。
59.在某些实施方式中,子步骤036
‑
038可以由控制模块130实现,或者说,控制模块130用于响应指令回调以将指令回调转换为语音控制事件,并将语音控制事件转换生成设置命令,以及执行设置以调整地图视角并显示地图视角调整后的地图界面。
60.在某些实施方式中,处理器用于响应指令回调以将指令回调转换为语音控制事件,并将语音控制事件转换生成设置命令,以及执行设置以调整地图视角并显示地图视角调整后的地图界面。
61.具体地,在地图客户端收到语音软件开发工具包派发的指令回调时,地图客户端做对应的业务处理,最终实现地图视角的切换。例如,在一些示例中,地图客户端监听到“地图正北”的语音指令回调(oncontroldisplaynorth)时,可响应指令回调,并转换为speech_cmd_data_control_display_north_tts事件(语音控制事件),并将speech_cmd_data_control_display_north_tts事件生成setmapmodecommand(设置命令),其中,设置命令的标注为north_up,即“地图正北”,再根据标注north_up以调整地图视角并显示地图视角调整后的地图界面。
62.需要说明的是,setmapmode是指设置指定设备环境的映射方式,映射方式定义了将逻辑单位转换为设备单位的度量单位,并定义了设备的x、y轴的方向。
63.请结合图7,在某些实施方式中,在响应指令回调以将指令回调转换为语音控制事件后,步骤s03还包括:0391:当前地图客户端以自动驾驶环境模拟显示的情况下,生成退出自动驾驶环境模拟显示命令;0392:根据退出自动驾驶环境模拟显示命令控制地图客户端退出自动驾驶环境模拟显示以显示地图界面。
64.在某些实施方式中,步骤0391可以由生成模块120实现,步骤0392可以由显示模块140实现。或者说,显示模块140用于当前地图客户端以自动驾驶环境模拟显示的情况下,生
成退出自动驾驶环境模拟显示命令,生成退出自动驾驶环境模拟显示命令。显示模块模块150用于根据退出自动驾驶环境模拟显示命令控制地图客户端退出自动驾驶环境模拟显示以显示地图界面。
65.在某些实施方式中,处理器用于当前地图客户端以自动驾驶环境模拟显示的情况下,生成退出自动驾驶环境模拟显示命令,以及根据退出自动驾驶环境模拟显示命令控制地图客户端退出自动驾驶环境模拟显示以显示地图界面。
66.请结合图8,需要说明的是,在本技术中,若车辆在行车过程中开启自动导航辅助驾驶服务时,则地图客户端能够实现自动驾驶环境模拟显示。在自动驾驶环境模拟显示下,可实时模拟车辆周围环境信息变化,如此,用户能够随时看到车辆在自动驾驶下车辆的行驶状况。若要切换地图视角,需要先退出自动驾驶环境模拟显示,从而显示地图界面,然后才能进行相应的开关操作。
67.因此,若在地图客户端注册并监听到语音软件开发工具包根据视角变更指令派发的指令回调后,地图客户端将指令回调转换为可以识别的语音控制事件,地图客户端可做执行条件检查,在车辆在处于自动导航辅助驾驶的情况下,可生成退出自动驾驶环境模拟显示命令,并根据退出自动驾驶环境模拟显示命令控制地图客户端退出自动驾驶环境模拟显示,从而显示地图界面。
68.如此,用户能够根据地图客户端显示的地图界面确定车辆是否执行语音请求。
69.优选地,请参阅图9,在某些实施方式中,在步骤01之后,语音交互方法还包括:04:将语音请求发送至服务器,以使服务器在语音请求与地图视角相关的情况下,响应于语音请求将语音请求在预设知识库中进行匹配并在匹配命中的情况下生成视角变更指令;05:通过语音软件开发工具包接收服务器回传的视角变更指令。
70.在某些实施方式中,步骤04和步骤05可以由控制模块130实现,或者说,控制模块130还用于将语音请求发送至服务器,以使服务器在语音请求与地图视角相关的情况下,响应于语音请求将语音请求在预设知识库中进行匹配并在匹配命中的情况下生成视角变更指令,以及通过语音软件开发工具包接收服务器回传的视角变更指令。
71.在某些实施方式中,处理器用于将语音请求发送至服务器,以使服务器在语音请求与地图视角相关的情况下,响应于语音请求将语音请求在预设知识库中进行匹配并在匹配命中的情况下生成视角变更指令。处理器还用于通过语音软件开发工具包接收服务器回传的视角变更指令。
72.服务器可对每条视角变更指令所对应的语音请求进行泛化操作,使得每条视角变更指令可对应多条语音请求。泛化操作包括但不限于将语音请求所对应的同义词、近义词进行泛化。
73.可理解,由于语音请求受到用户口音、说话习惯、车内环境以及广播音乐等影响,可能导致语音请求不一定完全与视角变更指令完全对应,而导致语音请求无法与视角变更指令匹配。因此,通过对使得每条视角变更指令所对应的语音请求进行泛化操作。从而可以进一步地提高语音控制的智能性与命中真实意图的成功率,用户体验更佳。
74.请参阅图10,在某些实施方式中,服务器在匹配未命中的情况下生成反馈信息,语音交互方法还包括:
06:响应于服务器发送的反馈信息进行语音和/或显示提醒。
75.在某些实施方式中,步骤06可以由控制模块130实现。或者说,控制模块130可以用于响应于服务器发送的反馈信息进行语音和/或显示提醒。
76.在某些实施方式中,处理器还可以用于响应于服务器发送的反馈信息进行语音和/或显示提醒。
77.可以理解,在服务器根据语音请求生成的文本数据与预设视角变更指令不匹配的情况下,例如,知识库中并无与文本数据对应的预设视角变更指令。则在匹配未命中的情况下,可生成匹配失败的反馈信息,并将反馈信息回传至车辆中,地图客户端可响应于服务器发送的反馈信息进行语音和/或显示提醒。语音提醒可以语音播报,显示提醒可以为ui提醒。例如,消息弹出框提醒。又例如,反馈信息为语音播报,则车辆在响应语音播报指令时进行语音播报以提示用户。
78.如此,在地图客户端无法执行用户关于地图视角的语音请求时,能够通过语音播报的方式或显示提醒的方式提示用户,使得用户可以了解到车辆无法执行对应的语音请求。
79.本技术还提供了一种语音交互系统,语音交互系统包括交通工具及服务器,语音交互系统包括交通工具及服务器,交通工具包括地图客户端,地图客户端预置有语音软件开发工具包。
80.地图客户端用于获取用户的语音请求,并通过语音软件开发工具包将语音请求传输至服务器。其中,语音请求与地图视角相关。
81.服务器用于接收语音软件开发工具包发送的语音请求,并根据语音请求生成视角变更指令,以及将视角变更指令发送至语音软件开发工具包。
82.地图客户端还用于通过语音软件开发工具包接收服务器响应语音请求生成并回传的视角变更指令后,接收语音软件开发工具包根据视角变更指令派发的指令回调,并根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。
83.本技术的语音交互系统中,通过预先在交通工具的地图客户端预置有语音软件开发工具包,在交通工具获取到有关地图视角的语音请求时,可将语音请求传输至服务器,服务器接收到语音请求后响应,生成视角变更指令,并将视角变更指令回传给交通工具,地图客户端通过语音软件开发工具包接收视角变更指令后,接收语音软件开发工具包根据视角变更指令派发的指令回调,并根据指令回调在地图客户端调整地图视角并显示地图视角调整后的地图界面。如此,实现了通过语音来控制地图客户端的地图视角,从而极大的提升了用户体验,且也有利于车辆安全。
84.在某些实施方式中,服务器包括预设知识库,服务器用于对语音请求进行语义识别得到文本数据;将文本数据与在预设知识库中进行匹配;在文本数据与预设知识库匹配并命中的情况下生成视角变更指令;或在文本数据与预设知识库匹配未命中的情况下生成反馈信息。
85.本技术实施方式还提供了一种存储有计算机程序的非易失性计算机可读存储介质,当计算机程序被一个或多个处理器执行时,实现上述任一实施方式的语音交互方法。本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的软件来完成。程序可存储于一非易失性计算机可读存储介质中,该程序
在执行时,可包括如上述各方法的实施例的流程。其中存储介质可为磁碟、光盘、只读存储记忆体(read
‑
only memory,rom)等。
86.在本说明书的描述中,参考术语“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。同时,参考术语“第一”、“第二”等的描述意在将同类或相似操作区别开来,“第一”与“第二”之间在某些实施方式中具有前后逻辑关系,在某些实施方式中并不一定具有逻辑或前后关系,需要根据实际实施例进行判定,不应该仅通过字面意思进行判定。
87.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本技术的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本技术的实施例所属技术领域的技术人员所理解。
88.尽管上面已经示出和描述了本技术的实施方式,可以理解的是,上述实施方式是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施方式进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

