1.本发明属于有源噪声控制技术领域,具体涉及一种用于单通道反馈有源噪声控制系统的 相对路径虚拟传感技术。
背景技术:
2.传统的噪声控制属于无源噪声控制(passive noise control,pnc),主要的技术手段包 括吸声处理、隔声处理、消声器等,它的噪声控制机理在于使噪声声波与声学材料或结构相 互作用从而达到降低噪声的目的。当噪声信号为低频信号时,pnc在成本、部署难度和有效 性上均有局限。因此,有源噪声控制(active noise control,anc)的提出与发展填补上了 这一部分的空白,近年来已发展成为噪声控制中的主要研究方向。
3.anc是利用声波的叠加特性来降低噪声的技术。当控制源辐射出与噪声源声波幅度相同、 相位相反的“抗噪声波”时,anc系统就可以在放置误差麦克风的期望位置处降低噪声。在 该系统中,误差麦克风的作用是监测误差信号并将该信号不断地反馈给采用了自适应控制滤 波器的anc系统,此处采用自适应控制滤波器的目的是为了解决噪声信号的时变问题,不断 跟踪噪声声波的幅度、相位变化,直至放置误差麦克风的位置处形成有源静区(超过10db 的降噪区域)。采用了自适应控制滤波器的anc系统具有实现简单、稳定性好的优点,因而在 有源噪声控制中被广泛使用。训练自适应控制滤波器常采用最小均方算法(least mean square, lms)。
4.根据使用麦克风的不同,anc系统在结构上分为前馈控制和反馈控制。前馈anc系统 包含参考麦克风和误差麦克风,其中参考麦克风靠近噪声源并采集噪声声波的先验信息,以 便为anc控制器提供与误差麦克风获得的误差信号高度相关的参考信号。因此,前馈anc 系统更适合处理宽带噪声,系统性能更加稳定。反馈anc系统仅由误差麦克风组成,通常使 用内部模型控制噪声,该内部模型利用误差信号预测原始噪声以得到估计的参考信号。因此, 使用内部模型的反馈anc系统只能降低可预测噪声(包括单频噪声和窄带噪声)。
5.anc系统也可以根据使用扬声器的数量分类。单通道anc系统由一个扬声器组成,通常 与一个误差麦克风、至多一个参考麦克风一起使用。多通道anc系统包含多个扬声器和多个 麦克风,它可以形成一个相对较大的有源静区。本发明只考虑在单通道anc系统上的实现。
6.在一些应用场景中,误差麦克风无法放置在所需的降噪位置处(虚拟位置),比如说无线 蓝牙耳机的应用,由于无法在希望得到有源静区的人耳骨膜处放置麦克风,因而就需要利用 虚拟传感技术在人耳的骨膜处形成有源静区。该技术主要包括训练阶段和控制阶段。在训练 阶段,需要事先在虚拟位置处放置误差麦克风,得到表示监测位置与虚拟位置之间传递关系 的先验信息。在控制阶段,将原本放置在虚拟位置处的误差麦克风移除,并利用在训练阶段 得到的先验信息使虚拟位置处形成有源静区。目前,存在两种已有的虚拟传感技术,它们分 别是辅助滤波器方法(the auxiliary filter,af)和远程麦克风方法(remote microphone, rm)。af方法的训练阶段较为复杂,主要由两部分组成。首先在虚拟
位置处放置误差麦克风, 利用fxlms(filtered
‑
x least mean square)算法获得此时anc系统稳定后的滤波器;然 后利用该滤波器训练包含传递关系先验信息的辅助滤波器。rm方法可以在训练阶段估计物理 初级通路和虚拟初级通路之间的关系,从而能够在控制阶段根据物理麦克风处的干扰信号估 计期望位置处的干扰信号,继而得到虚拟位置处的有源静区。edamoto s,shi c,kajikaway于2016年发表的论文《virtual sensing technique for feedforward active noise control》 和jung w,elliott s j,cheer j于2018年发表的论文《estimation of the pressureat a listener's ears in an active headrest system using the remote microphonetechnique》分别在前馈anc系统中评估了af方法、rm法在虚拟位置处的降噪效果,从论文 的实验结果得知这两种方法均可以在不能放置误差麦克风的虚拟位置处获得超过10db的降 噪量。
7.目前虚拟传感技术较多的应用于前馈anc系统中,但在噪声源无法定位的情况下,不能 确定参考麦克风的位置,因此无法使用前馈anc系统。相对af方法,rm方法的训练阶段较 为简单,但其需要在控制阶段使用已离线建模好的虚拟次级通路模型。当声场环境变化造成 虚拟次级通路改变时,由于路径无法在不能放置误差麦克风的位置处进行在线建模,因此虚 拟次级通路模型的脉冲响应函数会和真实路径之间产生偏差,从而在系统中引入模型误差, 影响系统的降噪效果。
技术实现要素:
8.本发明的发明目的在于:为了解决rm方法的缺点的同时降低前馈anc系统的规模,本 发明提出了一种用于单通道反馈anc系统的相对路径虚拟传感(relative path,rp)方法。
9.本发明的用于单通道反馈有源噪声控制系统的相对路径虚拟传感方法,包括下列步骤:
10.训练步骤:将虚拟麦克风临时放置在期望的降噪位置,物理麦克风(即监测麦克风)放 置在远离有源静区的位置,建立并训练物理麦克风与虚拟麦克风之间的传递模型,包括相对 初级路径模型和相对次级路径模型,用以获取相对初级路径模型的脉冲响应函数和相对次级 路径模型的脉冲响应函数;
11.其中,相对初级路径模型指:物理初级通路与虚拟初级通路之间的模型,相对次级路径 模型指:物理次级通路与虚拟次级通路之间的模型;
12.控制步骤:在目标有源静区不放置在误差麦克风的情况下,自适应控制滤波器基于物理 麦克风的实时输出和训练步骤获得的相对初级路径模型的脉冲响应函数和相对次级路径模型 的脉冲响应函数进行权系数的迭代更新,直至目标虚拟位置处形成有源静区。
13.在一种可能的实现方式中,自适应控制滤波器为噪声控制滤波器。
14.在一种可能的实现方式中,训练步骤中,对所述传递模型的训练过程为:
15.对所建立的相对初级路径模型和相对次级路径模型进行迭代更新,当相对初级路径模型 中的虚拟位置处的误差信号和相对次级路径模型中的虚拟位置处的误差信号满足预置的收敛 条件时,停止迭代更新,并基于当前迭代更新后的初级路径模型和相对次级路径模型得到对 应的脉冲响应函数。
16.在一种可能的实现方式中,控制步骤中,自适应控制滤波器进行更新迭代的处理
过程具 体为:
17.基于相对初级路径模型的脉冲响应函数和相对次级路径模型的脉冲响应函数获取虚拟位 置估计处的干扰信号和抗噪信号,两者的叠加得到虚拟位置处估计的误差信号,自适应控制 滤波器通过该误差信号和滤波参考信号进行迭代更新。
18.综上所述,由于采用了上述技术方案,本发明的有益效果是:既可以避免噪声源无法定 位的问题,又能够减少由于不能对次级通路进行在线建模所导致的模型误差。
附图说明
19.图1是具体实施方式中,本发明提出的用于单通道反馈anc系统的相对路径虚拟传感方 法的过程框图,其中图1(a)是训练阶段,物理初级通道域虚拟初级通路之间的关系图;图 1(b)是训练阶段,物理次级通路与虚拟次级通路之间的关系图;图1(c)是控制阶段的过 程框图;
20.图2是具体实施方式中,本发明在单通道反馈anc系统上的结构部署示意图;
21.图3是具体实施方式中,对应图2所示的部署结构的声场路径设置图;
22.图4是具体实施方式中,本发明在训练阶段的误差信号图;
23.图5是具体实施方式中,本发明在控制阶段的误差信号图;
24.图6是具体实施方式中,本发明在控制阶段的降噪效果图;
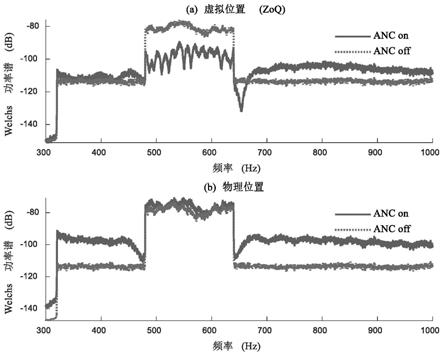
25.图7是具体实施方式中,本发明在控制阶段收敛后的噪声功率谱图。
具体实施方式
26.为使本发明的目的、技术方案和优点更加清楚,下面结合实施方式和附图,对本发明作 进一步地详细描述。
27.当虚拟次级通路发生变化时,由于控制阶段不能在虚拟位置处放置临时麦克风,因此无 法用在线通路建模技术获得rm方法所需要的精确次级通路模型。为了解决rm方法的缺点的 同时降低前馈anc系统的规模,本发明提出了用于单通道反馈anc系统的相对路径虚拟传感 方法。
28.rp方法的第一阶段是训练阶段。在这一阶段,为了建立物理麦克风与误差麦克风之间的 传递模型,即物理初级通路与虚拟初级通路之间的模型、物理次级通路与虚拟次级通路之间 的模型,虚拟麦克风临时放置在期望的降噪位置处。物理麦克风,也称为监测麦克风,放置 在远离有源静区的位置。即监测麦克风与有源静区的距离大于某个指定的距离门限。
29.rp方法的第二阶段是控制阶段,在没有任何误差麦克风放置在目标有源静区的情况下, 自适应控制滤波器利用物理麦克风的实时输出和训练阶段获得的先验信息进行更新迭代,直 至虚拟位置处形成有源静区。
30.图1展示了本发明的相对路径虚拟传感方法的过程框图,rp方法的训练阶段包括两个部 分。在训练阶段(a)中(参考图1(a))),利用物理麦克风测量得到的干扰信号去估计虚拟 麦克风处的干扰信号,这种估计依赖于相对初级通路模型c
p
(z),可表示为:
[0031][0032]
其中,下标m、v分别表示物理位置和虚拟位置,c
p
(n)是相对初级路径模型的脉冲响应 函数,x(n)是噪声源信号的矢量形式,*表示卷积运算。在公式(1)中,d
m
(n)、d
v
(n)分别 是当前时刻物理麦克风和虚拟麦克风测得的干扰信号,它们的矢量形式分别表示为:
[0033]
d
v
(n)=[d
v
(n),d
v
(n
‑
1),...,d
v
(n
‑
n 1)]
t
ꢀꢀꢀꢀꢀꢀ
(2)
[0034]
d
m
(n)=[d
m
(n),d
m
(n
‑
1),...,d
m
(n
‑
n 1)]
t
ꢀꢀꢀꢀꢀ
(3)
[0035]
其中,n是采样长度,取决于相对初级路径模型c
p
(z)、相对次级路径模型c
s
(z)的长度。 n表示采样点,物理初级通路p
m
(n)、虚拟初级通路p
v
(n)分别是噪声源到物理麦克风和虚拟 麦克风之间的脉冲响应函数,上标t表示矩阵转置。
[0036]
在训练阶段(b)中(参考图1(b)),相对次级通路模型c
s
(z)能够根据物理麦克风测量 得到的抗噪信号估计出虚拟麦克风处的抗噪信号,因此有:
[0037][0038]
其中,y(n)是控制源信号的矢量表示,c
s
(n)是相对次级路径模型的脉冲响应函数。y
m
(n)、 y
v
(n)分别表示物理麦克风和虚拟麦克风测得的抗噪信号,物理次级通路s
m
(n)、虚拟次级通 路s
v
(n)分别是次级扬声器到物理麦克风和虚拟麦克风之间的脉冲响应函数。
[0039]
相对次级路径模型c
s
(z)只与物理次级通路及虚拟次级通路有关。因此,在控制阶段可利 用物理次级通路模型及相对次级路径模型间接得到虚拟次级通路模型,避免环境发生变化时, 虚拟次级通路无法在线建模的弊端。
[0040]
本具体实施方式中,利用虚拟位置处测得的误差信号e
cp
(n)、e
cs
(n)来判断训练阶段是否 达到稳定状态,它们分别表示为:
[0041]
e
cp
(n)=d
v
(n)
‑
d
m
(n)*c
p
(n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0042]
e
cs
(n)=y
v
(n)
‑
y
m
(n)*c
s
(n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0043]
当误差信号e
cp
(n)、e
cs
(n)随着相对路径模型的更新迭代逐渐收敛并保持收敛状态,那么 表示训练阶段逐渐达到稳定状态并保持稳定状态。
[0044]
在控制阶段(参考图1(c)),图1中所示的带背景色的方框(灰色方框)分别表示相对 路径模型,其中,是物理次级通路模型,假设即利用训练 阶段得到的c
p
(n)和c
s
(n),可以估计得到虚拟位置处的误差信号:
[0045][0046]
其中,是当前时刻估计的虚拟位置处的干扰信号和抗噪信号。在公式(7) 中,是虚拟次级通路模型的脉冲响应函数,假设
可以基于实际应用场景进行设置,本发明不做具体限定)时,则确认当前虚拟位置形成有源 静区。
[0070]
设置实验所需参数。图2中展示了本发明的rp方法在单通道反馈anc系统上的结构部署, 图3是其声场路径设置,由实时dsp(digital signal processing)平台测量所需全部路径 的脉冲响应。其中,系统的采样率是16khz;物理初级通路、虚拟初级通路的脉冲响应长度 为75ms;物理次级通路、虚拟次级通路的脉冲响应长度为25ms。将噪声控制滤波器、相对路 径模型的长度设置为400阶。本发明的rp方法在两个阶段所用的自适应算法均为归一化fxlms 算法,收敛步长设置可参考表1。
[0071]
表1 rp方法在反馈anc系统上的收敛部长设置
[0072][0073]
由于反馈anc系统能够降低窄带噪声或单频噪声。因此,本发明将噪声源作如下设置:
[0074]
首先,设置噪声源是带宽为600
‑
800hz的窄带高斯白噪声,引入宽带干扰,设置信噪比 为64。在训练阶段,把虚拟麦克风临时放置在有源静区处,通过观察误差信号e
cp
(n)、e
cs
(n)的 收敛情况,判断训练阶段是否达到稳定状态。
[0075]
图4展示了当噪声源是窄带信号时,训练阶段的误差信号图。观测图3可知,训练阶段 在t=200s后达到稳定状态。因此,可得到相对路径模型c
p
(n)和c
s
(n)的滤波器系数矩阵。随 后将虚拟位置处的误差麦克风撤离,利用训练阶段得到的c
p
(n)和c
s
(n)估计虚拟位置处的干扰 信号和抗噪信号,从而能够在控制阶段得到虚拟位置处的误差信号,通过式(15)对滤波器 进行更新迭代,直至虚拟位置处形成有源静区。
[0076]
通过图5,可观察到控制阶段在t=20s后达到收敛状态,即系统在t=20s后达到稳定状态。 根据式(17),可以计算出在单通道反馈anc系统中使用rp方法的降噪效果,如图6所示。 从图6可得知:虚拟位置处的降噪效果达到了15db左右,因此rp算法能够在虚拟位置处形 成有源静区。而在物理位置处,噪声增加了约2db左右,因此物理位置不适合作为降噪区域。 同样的结论可通过图7所示的噪声功率谱图观察到,通过图7,可得知,在相应频段内虚拟位 置处的噪声得到了处理,但是降噪后的噪声功率并没有低于底噪,符合真实场景(任何环境 中都存在底噪,降噪后的噪声功率不低于底噪)。
[0077]
综上所述,在单通道反馈anc系统中使用rp方法可以在期望的降噪位置处形成有源静区, 同时该方法除了可以避免噪声源无法定位的问题外还能够减少虚拟次级通路无法在线建模所 带来的模型误差。因此,可考虑该方法可在具体应用中的实现。
[0078]
以上所述,仅为本发明的具体实施方式,本说明书中所公开的任一特征,除非特别叙述, 均可被其他等效或具有类似目的的替代特征加以替换;所公开的所有特征、或所有方法或过 程中的步骤,除了互相排斥的特征和/或步骤以外,均可以任何方式组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

