1.本发明涉及一种电子打击乐器,且涉及一种可模拟原声的打击乐器的演奏法的电子打击乐器及乐音生成方法。
背景技术:
2.在框体安装有击打面的电子鼓等电子打击乐器已知有包括压敏传感器、及压电传感器的电子打击乐器,所述压敏传感器检测对击打面的按压(打击时击打面受到的压力),所述压电传感器检测框体的振动(专利文献1)。在专利文献1中公开了根据压敏传感器的输出值及压电传感器的输出值来计算对击打面的打击位置,并生成与所述打击位置对应的乐音的乐音生成方法。
3.[现有技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本专利特开2001-255871号公报
技术实现要素:
[0006]
[发明所要解决的问题]
[0007]
然而,在仅具有检测对击打面的按压的压敏传感器及检测框体的振动的压电传感器的现有的电子打击乐器中,有时无法模拟原声的打击乐器的各种演奏法。例如,在用手打击击打面的情况下,与用棒打击的情况相比,打击位置(范围)广,但在现有的电子打击乐器或乐音生成方法中,难以确定利用手的广的打击位置,从而难以生成与所述广的打击位置对应的乐音。即,在现有的电子打击乐器或乐音生成方法中,存在无法模拟用手打击击打面的演奏法的问题。
[0008]
本发明是为了解决所述问题而成,其目的在于提供一种可模拟原声的打击乐器的演奏法的电子打击乐器及乐音生成方法。
[0009]
[解决问题的技术手段]
[0010]
为了实现所述目的,本发明的电子打击乐器包括:框体;击打面,安装在所述框体;压敏传感器,配置在所述击打面的中央部的背面侧来检测对所述中央部的按压;头振动传感器,配置在所述击打面的周边部的背面侧来检测所述周边部的振动;以及轮圈振动传感器,配置在所述击打面的俯视时与所述头振动传感器重叠的位置来检测所述框体的振动。
[0011]
本发明的乐音生成方法是输出发音指示的方法,所述发音指示与对安装在电子打击乐器的框体的击打面的打击位置对应,且所述乐音生成方法包括:位置计算步骤,根据检测对所述击打面的按压的压敏传感器的输出值、检测所述击打面的振动的头振动传感器的输出值、以及检测所述框体的振动的轮圈振动传感器的输出值,来计算对所述击打面的打击位置。
附图说明
[0012]
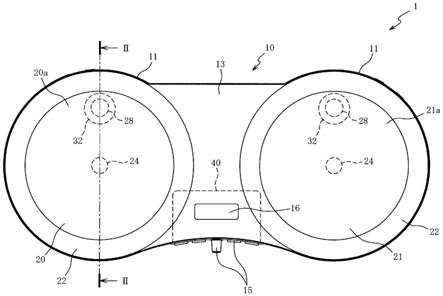
图1是第一实施方式中的电子打击乐器的平面图。
[0013]
图2是图1的ii-ii线的电子打击乐器的剖面图。
[0014]
图3是表示电子打击乐器的电气结构的框图。
[0015]
图4的(a)是表示串扰(crosstalk)量计算用包络线及串扰消除用包络线的形状的示意图,图4的(b)是说明使用了串扰量计算用包络线的串扰量的计算方法的图,图4的(c)是说明使用串扰消除用包络线进行的串扰消除的判定方法的图。
[0016]
图5的(a)是压敏传感器的输出波形的输出值-时间图表,图5的(b)是头振动传感器的电压波形的电压-时间图表,图5的(c)是轮圈振动传感器的电压波形的电压-时间图表。
[0017]
图6的(a)是初始化处理的流程图,图6的(b)是定期处理的流程图。
[0018]
图7是按入检测处理的流程图。
[0019]
图8是打击检测处理的流程图。
[0020]
图9的(a)是第二实施方式中的midi控制器的平面图,图9的(b)是图9的(a)的ixb-ixb线的midi控制器的剖面图。
[0021]
图10是表示midi控制器的电气结构的框图。
[0022]
图11是定期处理的流程图。
[0023]
[符号的说明]
[0024]
1:电子打击乐器
[0025]
10:框体
[0026]
20a、21a:击打面
[0027]
24:压敏传感器
[0028]
28:头振动传感器
[0029]
32:轮圈振动传感器
[0030]
40:控制装置
[0031]
42b:加权系数数据
[0032]
s54~s59:位置计算部件、位置计算步骤
[0033]
s54:峰值获取部件
[0034]
s57:间距获取部件
[0035]
w1、w2、w3、b:加权系数
[0036]
x1:峰值比特量
[0037]
x2:压敏峰值特征量
[0038]
x3:间距特征量
具体实施方式
[0039]
以下,参照附图对优选的实施方式进行说明。首先,参照图1及图2对电子打击乐器(乐音生成装置)1的整体结构进行说明。图1是第一实施方式中的电子打击乐器1的平面图。图2是图1的ii-ii线的电子打击乐器1的剖面图。再者,为了容易理解,将图1的纸面近前侧及图2的上侧设为电子打击乐器1的上方,将图1的纸面里侧及图2的下侧设为电子打击乐器
1的下方。另外,将图1的纸面左侧、纸面右侧、纸面下侧、纸面上侧分别设为电子打击乐器1的左方、右方、正面侧(演奏者侧)、背面侧。
[0040]
如图1及图2所示,电子打击乐器1是模拟演奏者用手敲击来演奏的邦戈鼓(bongo)的电子乐器。电子打击乐器1主要包括:一个框体10;两块头20、21,分别安装在框体10;轮圈22,分别设置在头20、头21的外缘;压敏传感器24,检测对头20、头21的按压;头振动传感器28,检测头20、头21的振动;轮圈振动传感器32,检测框体10的振动;以及控制装置40,输出乐音的发音指示。
[0041]
电子打击乐器1形成为大致左右对称。头20设置在电子打击乐器1的左侧,头21设置在电子打击乐器1的右侧。压敏传感器24、头振动传感器28及轮圈振动传感器32相对于各个头20、头21各配置一个。以下,只要无特别指示,则对电子打击乐器1的左侧进行说明,省略右侧的说明。
[0042]
框体10包括:圆筒状的壳体(shell)11;连结部13,将左右两侧的壳体11彼此连结;以及框架14,供安装压敏传感器24或头振动传感器28等。壳体11是下端被封闭而上端开口的圆筒状的构件,且由合成树脂或金属等形成。连结部13以内部与壳体11的内部相连的方式形成。通过将一体成形有左右两侧的壳体11与连结部13的上侧一半的顶壳(top case)和一体成形有它们的下侧一半的底壳(bottom case)相互组装,形成左右两侧的壳体11及连结部13。
[0043]
在连结部13的内部设置有控制装置40。电连接于所述控制装置40的多个操作件15或液晶显示器(liquid crystal display,lcd)16设置在连结部13。操作件15或lcd 16配置在连结部13的演奏者侧。操作件15用于设定后述的峰值比特征量x1的计算中所使用的用户参数等。lcd 16是显示所述用户参数等的显示装置。
[0044]
框架14是在壳体11的顶壳一体成形有外周的大致圆板状的构件。框架14将壳体11的内部上下划分,且与头20上下相向。在框架14的径向上的中央部的下表面安装有朝向上方发出乐音的扬声器17。在扬声器17的上方的框架14设置有在板厚方向上贯通的多个贯通孔14a。由此,从扬声器17朝向上方发出的乐音通过贯通孔14a朝向头20。
[0045]
头20是覆盖壳体11的上端的膜状的构件,且由网格状原材料形成。由此,从扬声器17发出且通过贯通孔14a的乐音从头20放出到电子打击乐器1的外部。头20的表面(上表面)即击打面20a被演奏者的手等打击。头20的背面20b面向框架14。再者,覆盖左侧的壳体11的上端的头21的表面为击打面21a。
[0046]
轮圈22是遍及整周固定头20的外缘的圆环状的构件。通过将轮圈22固定在壳体11的上端部的外侧,施加有张力的头20安装在框体10。在轮圈22的上表面及外周面设置有橡胶制的罩22a。由此,可抑制用手打击了轮圈22时对手的负担。
[0047]
压敏传感器24是检测压力变化的圆板状的压敏电阻元件。电路构成为在未对压敏传感器24施加压力的状态下,压敏传感器24的输出值成为最大。施加至压敏传感器24的压力越大,压敏传感器24的输出值越小。压敏传感器24以位于头20(击打面20a)的中央部的背面20b侧的方式安装在框架14的上表面。再者,所谓击打面20a的中央部,优选为将击打面20a的径向中心设为0%、将轮圈22的内周缘设为100%时的10%以内的部位。进而,优选为压敏传感器24位于击打面20a的径向中心。
[0048]
除连接压敏传感器24与控制装置40的配线(未图示)通过的部分以外,在压敏传感
器24的周围设置有间隔件25。间隔件25是比压敏传感器24略厚的板状的构件,且安装在框架14的上表面。
[0049]
在间隔件25的上表面安装有弹性体26。弹性体26是由海绵(sponge)形成的四角锤台状的缓冲材,且覆盖压敏传感器24的上方。在图2中,用两点划线示出了未施加载荷的状态下的弹性体26。弹性体26设定为未施加载荷的状态下的上下尺寸(壳体11的轴向尺寸)比安装在框体10的头20与压敏传感器24之间的上下尺寸长。由此,弹性体26在头20(击打面20a)与压敏传感器24之间在上下方向上被压缩。
[0050]
当击打面20a被打击或按压时,压敏传感器24经由弹性体26被按压,压敏传感器24检测所述打击或按压。由于在压敏传感器24的周围存在间隔件25,因此,越强力地按压击打面20a,越可从压敏传感器24的中央朝向间隔件25使压敏传感器24与弹性体26的接触面积增加。由此,可根据击打面20a的按入量或打击的强度而使压敏传感器24的输出值容易变动。进而,弹性体26形成为朝向击打面20a而前端变细的四角锤台状,因此可将来自击打面20a的压力稳定地施加至压敏传感器24。
[0051]
另外,即使击打面20a未被按压或打击,弹性体26也在击打面20a与压敏传感器24之间被压缩,因此在击打面20a与压敏传感器24之间不存在游隙。因此,即使不强力地按压击打面20a,也可使压敏传感器24的输出值变化。由此,可提高压敏传感器24相对于对击打面20a的打击或按压的灵敏度。
[0052]
头振动传感器28由检测振动的圆板状的压电元件形成。头振动传感器28配置在头20的背面20b侧,经由双面胶带29安装在框架14的上表面。头振动传感器28位于头20(击打面20a)的周边部之中远离演奏者的背面侧。再者,所谓周边部,优选为将头20的径向中心设为0%、将轮圈22的内周缘设为100%时的70%以上的部位。
[0053]
双面胶带29是具有缓冲性的圆板状的构件。双面胶带29的直径比头振动传感器28的直径短。由此,可使头振动传感器28的外周侧容易变形,从而可确保头振动传感器28的检测灵敏度。
[0054]
在头振动传感器28的上表面(头20侧)粘接有缓冲垫30。缓冲垫30是由海绵形成的圆柱状的缓冲材,且覆盖头振动传感器28的上方。
[0055]
缓冲垫30设定为未施加载荷的状态下的上下尺寸比安装在框体10的头20与头振动传感器28之间的上下尺寸长。由此,弹性体26在头20(击打面20a)与头振动传感器28之间在上下方向上被压缩。因此,可维持因打击而振动的头20与缓冲垫30的接触状态,从而可通过头振动传感器28确实地检测头20(击打面20a)的周边部的振动。再者,在本实施方式中的电子打击乐器1中,通过头振动传感器(打击检测部件)28检测对击打面20a的打击,并根据所述头振动传感器28的输出值而判断为击打面20a被打击。
[0056]
当打击头振动传感器28的正上方的击打面20a时,与打击了击打面20a的其他位置的情况相比,头振动传感器28的输出值容易急剧变大。距配置头振动传感器28的演奏者远的头20的背面侧是难以被演奏者直接打击的位置,因此可抑制头振动传感器28的输出值急剧变大。特别是本实施方式的电子打击乐器1,在一个框体10设置有两个击打面20a、21a,操作件15或lcd 16位于框体10的正面侧,因此可使操作件15或lcd 16位于演奏者侧而使头振动传感器28确实地位于背面侧。其结果,可难以使头振动传感器28的输出值急剧变大。
[0057]
轮圈振动传感器32由检测振动的圆板状的压电元件形成。轮圈振动传感器32配置
在击打面20a的俯视时(图1)与头振动传感器28重叠的位置。轮圈振动传感器32经由双面胶带33安装在框架14的下表面。
[0058]
双面胶带33是具有缓冲性的圆环板状的构件。由此,可使轮圈振动传感器32的中心侧容易变形,从而可确保轮圈振动传感器32的检测灵敏度。双面胶带33的外径比轮圈振动传感器32的直径短。由此,可使轮圈振动传感器32的外周侧容易变形,从而可确保轮圈振动传感器32的检测灵敏度。
[0059]
控制装置40配置在框体10的内部。控制装置40将发音指示输出至音源45(参照图3),所述发音指示与相对于各个击打面20a、击打面21a而设置的压敏传感器24、头振动传感器28及轮圈振动传感器32的输出值对应。控制装置40通过未图示的配线连接于压敏传感器24、头振动传感器28及轮圈振动传感器32等。
[0060]
接下来,参照图3对电子打击乐器1的电气结构进行说明。图3是表示电子打击乐器1的电气结构的框图。电子打击乐器1的控制装置40具有中央处理器(central processing unit,cpu)41、只读存储器(read only memory,rom)42、以及随机存取存储器(random access memory,ram)43,且分别经由总线(bus line)44而连接。另外,在总线44分别连接有击打面20a侧的压敏传感器24、头振动传感器28及轮圈振动传感器32、击打面21a侧的压敏传感器24、头振动传感器28及轮圈振动传感器32、操作件15、lcd 16、以及音源45。在音源45连接有数字模拟转换器(digital to analog converter,dac)46,在dac 46连接有放大器47,在放大器47连接有扬声器17。
[0061]
在用手打击了击打面20a、击打面21a的情况下,电子打击乐器1将发音指示从cpu 41输出至音源45,所述发音指示与基于所述打击的压敏传感器24、头振动传感器28及轮圈振动传感器32的检测结果(输出值)对应。音源45是按照来自cpu 41的发音指示控制乐音(打击音)的音色或各种效果等的装置。在音源45虽然未图示,但内置进行波形数据的滤波或效果(effect)等的运算处理的数字信号处理器(digital signal processor,dsp)。电子打击乐器1利用dac 46将通过音源45处理的数字乐音信号转换为模拟信号,通过放大器47将所述信号放大,并从扬声器17放出基于乐音信号的乐音。
[0062]
电子打击乐器1在一个框体10设置有两个击打面20a、21a,因此可以伴随击打面20a的打击的乐音与伴随击打面21a的打击的乐音不同的方式生成发音指示或乐音信号。由此,电子打击乐器1可模拟针对每个击打面20a、击打面21a音色不同的原声(acoustic)邦戈鼓的演奏法。
[0063]
cpu 41是控制通过总线44连接的各部的运算装置。rom 42是无法改写的存储器。在rom 42中存储(保存)控制程序42a及加权系数数据42b。当通过cpu 41执行控制程序42a时,在电子打击乐器1的电源接通后立即执行初始化处理(图6的(a)),其后执行定期处理。
[0064]
另外,在控制程序42a内虽未图示但包含串扰消除程序(串扰消除部件)。所谓串扰,例如是指在打击了击打面20a的情况下,由所述打击引起的振动传递到击打面21a侧。所谓串扰消除,是即使头振动传感器28检测到由所述串扰引起的击打面21a的振动,也不发出基于击打面21a的振动的乐音的处理。只要是可执行串扰消除的程序,则可将已知的串扰消除程序最优化并用于本实施方式。
[0065]
参照图4的(a)~图4的(c)对串扰消除程序进行说明。在以下的说明中,对打击击打面20a,击打面21a受到串扰的情况进行说明,但可以说在打击击打面21a,击打面20a受到
串扰的情况下也同样如此。另外,在击打面20a的头振动传感器28的输出值(头传感器值环缓冲器43a的最新值)超过后述的打击阈值n1(参照图5的(b))的情况下,称为输出了来自击打面20a的触发信号,将此时的击打面20a的头振动传感器28的峰值称为触发信号的电平。对于击打面21a的头振动传感器28的输出值而言也同样。
[0066]
如图4的(a)~图4的(c)所示,串扰消除使用串扰量计算用包络线71及串扰消除用包络线72。图4的(a)是表示串扰量计算用包络线71及串扰消除用包络线72的形状的示意图。再者,在图4的(a)中,横轴表示时刻,纵轴表示电平。
[0067]
串扰量计算用包络线71是为了计算表示击打面21a从击打面20a受到的串扰的程度的值(即,串扰量)而使用的包络线。另一方面,串扰消除用包络线72是为了判定是否对从击打面20a、击打面21a输入的触发信号执行串扰消除而使用的包络线。
[0068]
串扰量计算用包络线71及串扰消除用包络线72均是模仿输出了成为生成对象的触发信号的击打面20a、击打面21a的振动状况的假想性的包络线,且如图4的(a)所示,基于成为生成对象的触发信号的电平而生成。具体而言,包络线71、包络线72由如下的一次函数表示,即,在成为生成对象的触发信号在时刻t1产生的情况下,时刻t1的触发信号的电平l在一定时间(在本实施方式中为200毫(mill)秒)后的时刻t2成为零。即,串扰量计算用包络线71及串扰消除用包络线72均是成为生成对象的触发信号的电平越大,减少的斜率越大。
[0069]
成为生成对象的触发信号是针对串扰量计算用包络线71的来自判定为被打击的击打面20a的触发信号。即,串扰量计算用包络线71相对于被判定为被打击的击打面20a仅生成一个。
[0070]
另一方面,关于串扰消除用包络线72的成为生成对象的触发信号是来自判定为被打击的击打面20a的触发信号、或来自判定为由从击打面20a受到的串扰而发音的击打面21a的触发信号。即,串扰消除用包络线72相对于判定为被打击的击打面20a及受到串扰但发音的击打面21a而生成一个或多个。再者,相对于判定为被打击的击打面20a生成的串扰消除用包络线72成为与串扰量计算用包络线71为相同形状的包络线。
[0071]
图4的(b)是说明使用了串扰量计算用包络线71的串扰量的计算方法的图。串扰量是在从击打面21a输入了触发信号的情况下,若已经生成了相对于击打面20a的串扰量计算用包络线71,则作为所述串扰量计算用包络线71中的当前值与所输入的触发信号的比率来计算。
[0072]
具体而言,在将从击打面21a在时刻x1所输入的触发信号的电平设为y1b,将相对于击打面20a而生成的串扰量计算用包络线71的、相对于时刻x1的当前值设为y1a的情况下,击打面21a受到的串扰量(%)作为(y1b/y1a)
×
100来计算。
[0073]
图4的(c)是说明使用串扰消除用包络线72进行的串扰消除的判定方法的图。是否对来自击打面20a或击打面21a的触发信号进行串扰消除的判定是使用所生成的串扰消除用包络线72中的、输入了成为判定对象的触发信号的时刻的当前值成为最大的包络线72来进行。更详细而言,是否进行串扰消除的判定是通过串扰消除用电平与成为判定对象的触发信号的电平的比较来进行,所述串扰消除用电平是将用于判定的串扰消除用包络线72中的当前值(即,输入了成为判定对象的触发信号的时刻),与对成为判定对象的触发信号的输出源的击打面20a或击打面21a规定的消除率相乘而得。在前者大于后者的情况下,判定为对成为判定对象的触发信号执行串扰消除。另一方面,在前者小于后者的情况下,判定为
不对成为判定对象的触发信号执行串扰消除。
[0074]“消除率”是将对各击打面20a、击打面21a设定的串扰消除设定值除以100而得的值。即,在将串扰消除设定值设为a的情况下,消除率由a/100表示。在进行是否进行串扰消除的判定的情况下,使用对成为判定对象的触发信号的输出源的击打面20a、击打面21a设定的串扰消除设定值作为值a(串扰消除设定值)。
[0075]
再者,串扰消除设定值越大,越难以执行串扰消除。在产品的出厂时,串扰消除设定值的初始值存储在未图示的闪速存储器或rom 42的未图示的区域。闪速存储器内的串扰消除设定值构成为可根据用户的需要针对每个击打面20a、击打面21a进行变更。
[0076]
具体而言,串扰消除的判定方法是在一个或多个所生成的串扰消除用包络线72之中,从击打面20a或击打面21a输入了触发信号的时刻x2的当前值的最大值为y2的情况下,将所输入的触发信号的电平与作为串扰消除用电平的y2
×
(a/100)进行比较。(a/100)是对所述触发信号的输出源的击打面20a或击打面21a规定的消除率。在此情况下,例如若从击打面20a或击打面21a输入的触发信号(判定对象的触发信号)的电平为小于y2
×
(a/100)的l2,则判定为对所述触发信号执行串扰消除。另一方面,若判定对象的触发信号的电平为大于y2
×
(a/100)的l1,则判定为不对所述触发信号执行串扰消除,即,是发音对象的触发信号。
[0077]
如此,控制装置40的串扰消除程序在通过将检测两个击打面20a、21a之中例如其中一个击打面21a的振动的头振动传感器28的输出值、与检测另一个击打面20a的振动的头振动传感器28的输出值进行比较,而判断为在击打面21a上产生的振动是由基于另一个击打面20a的振动而产生的串扰引起的情况下,不输出基于由串扰引起的振动的发音指示。由此,即使通过击打面20a被打击而击打面21a的头振动传感器28检测到未被打击的击打面21a的振动,也可防止伴随所述检测的乐音的发音。
[0078]
另外,例如在根据击打面20a的头振动传感器28的输出值来计算对击打面20a的打击位置的情况下,也可通过将击打面20a侧的头振动传感器28的输出值与击打面21a侧的头振动传感器28的输出值进行比较,根据串扰量来去除由基于击打面21a的振动而产生的串扰引起的击打面20a的振动成分。由此,可提高对击打面20a的打击位置的计算精度。
[0079]
进而,同样地,也可通过将击打面20a侧的轮圈振动传感器32的输出值与击打面21a侧的轮圈振动传感器32的输出值进行比较,来计算击打面20a侧的轮圈振动传感器32的输出值中的、由基于击打面21a的振动而产生的串扰引起的成分。在根据击打面20a的轮圈振动传感器32的输出值来计算对击打面20a的打击位置的情况下,通过根据串扰量来去除由基于击打面21a的振动而产生的串扰引起的击打面20a侧的轮圈振动传感器32的输出值的成分,可提高对击打面20a的打击位置的计算精度。
[0080]
返回图3进行说明。控制装置40针对每个击打面20a、击打面21a具有各种数据或存储器、标记,针对每个击打面20a、击打面21a进行控制程序42a的定期处理,每个击打面20a、击打面21a的数据或处理等相同。因此,以下,对与击打面20a相关的数据或处理等进行说明,与击打面21a相关的数据或处理等的说明省略。
[0081]
为了在图8的打击检测处理中检测打击位置,在存储在rom 42的加权系数数据42b中保存有加权系数w1、加权系数w2、加权系数w3、加权系数b。加权系数w1、加权系数w2、加权系数w3、加权系数b是表示根据对击打面20a的打击位置而变化的各特征量x1、特征量x2、特
征量x3的重要度的系数。在打击检测处理中,将相互对应的各特征量x1、特征量x2、特征量x3与加权系数w1、加权系数w2、加权系数w3的积和作为常数项的加权系数b相加来计算假想边缘度a。即,假想边缘度a由“a=w1
×
x1 w2
×
x2 w3
×
x3 b”的式子表示。
[0082]
通过将假想边缘度a代入标准s型函数(sigmoid function),来计算由0到1之间表示的边缘度e。即,在将以纳皮尔常数(napier constant)为底、以x为变量的指数函数表述为exp(x)的情况下,边缘度e由“e=1/(1 exp(-a))”的式子表示。边缘度e是设定为在击打面20a的径向中心被打击时取0,在击打面20a的最靠径向外侧被打击时取1的值。
[0083]
边缘度e的计算中所使用的加权系数w1、加权系数w2、加权系数w3、加权系数b是针对电子打击乐器1的每个产品设计,通过机械学习的监督式学习来计算,在产品出厂时作为固定值存储在加权系数数据42b。作为具体的机械学习的方法,首先,获取多个打击了击打面20a的径向中心附近(距径向中心30%以下的范围)时的各特征量x1、特征量x2、特征量x3的数据,并将在输入了这些数据的情况下应输出的边缘度e设为0。另外,获取多个打击了击打面20a的最靠径向外侧附近(距径向中心80%以上的范围)时的各特征量x1、特征量x2、特征量x3的数据,并将在输入了这些数据的情况下应输出的边缘度e设为1。通过利用这些输入输出数据执行机械学习,来计算加权系数w1、加权系数w2、加权系数w3、加权系数b。
[0084]
参照图5的(a)~图5的(c),对各特征量x1、特征量x2、特征量x3进行说明。图5的(a)是压敏传感器24的输出波形的输出值-时间图表。纵轴表示压敏传感器24的输出值,横轴表示时间。再者,施加至压敏传感器24的压力越大,压敏传感器24的输出值越小。在本实施方式中,压敏传感器24的输出值的最大值是1024。
[0085]
在未打击或按压击打面20a的状态下,从经压缩的弹性体26对压敏传感器24施加压力,因此在比最大值1024低的位置的基准值b1附近存在压敏传感器24的输出值。当击打面20a被打击或按压时,压敏传感器24的输出值下降而取峰值pm。从击打面20a被打击或按压之前的基准值b1减去峰值pm而得的数值为压敏峰值特征量x2。
[0086]
对击打面20a的打击位置越接近击打面20a的中央部压敏峰值特征量x2越大,打击位置越接近击打面20a的周边部压敏峰值特征量x2越小。这是因为打击位置越接近击打面20a的中央部,击打面20a越容易向下方挠曲而从击打面20a施加至压敏传感器24的压力越强。
[0087]
图5的(b)是头振动传感器28的电压波形的电压-时间图表。图5的(c)是轮圈振动传感器32的电压波形的电压-时间图表。均是纵轴表示电压,横轴表示时间。头振动传感器28的电压波形在击打面20a向下方(头振动传感器28侧)振动时取负的电压值(输出值)。击打面20a的摆动越大,头振动传感器28的电压波形的振幅越大。另外,框体10的摆动越大,轮圈振动传感器32的电压波形的振幅越大。
[0088]
在头振动传感器28的电压值的绝对值超过规定的打击阈值n1的情况下,cpu 41判断为击打面20a被打击。将从判断为被打击的此时起5毫秒以内的头振动传感器28的电压值的绝对值的最大值设为峰值pzhm。另外,将从基于头振动传感器28的电压波形判断为被打击时起5毫秒以内的轮圈振动传感器32的电压值(输出值)的绝对值的最大值设为峰值pzrm。
[0089]
打击位置越接近击打面20a的中央部,击打面20a越容易向下方挠曲而头振动传感器28的峰值pzhm越大。另外,由对击打面20a的打击引起的振动从击打面20a的周边部传递
到框体10,因此打击位置越接近击打面20a的中央部,从打击位置到检测框体10的振动的轮圈振动传感器32为止的振动的传递距离越长,轮圈振动传感器32的峰值pzrm越小。
[0090]
头振动传感器28的峰值pzhm除以轮圈振动传感器32的峰值pzrm,进而乘以存储在后述的调整值存储器43k的用户参数而得的值是峰值比特征量x1。基于所述的头振动传感器28的峰值pzhm及轮圈振动传感器32的峰值pzrm的特性,打击位置越接近击打面20a的中央部,峰值比特征量x1越大,打击位置越接近击打面20a的周边部,峰值比特征量x1越小。
[0091]
基于对击打面20a的打击的头振动传感器28的电压波形中的、击打面20a最初向头振动传感器28侧振动(取负的值)的初始半波的间距为间距特征量x3。即,所谓初始半波,是头振动传感器28的电压波形中的、在最初与打击阈值n1相交的位置前后电压值成为0的两点间的部分。打击位置越接近击打面20a的中央部,间距特征量x3越大,打击位置越接近击打面20a的周边部,间距特征量x3越小。这是因为打击了击打面20a的中央部时的击打面20a的振动模式与打击了击打面20a的周边部时的击打面20a的振动模式不同。
[0092]
返回图3。ram 43是在cpu 41执行控制程序42a等程序时能够改写地存储各种工作数据或标记等的存储器。在ram 43中分别设置有头传感器值环缓冲器43a、轮圈传感器值环缓冲器43b、压敏传感器值环缓冲器43c、基准值计算环缓冲器43d、平均值存储器43e、基准值存储器43f、打击处理标记43g、按入标记43h、按入值存储器43i、特征量存储器43j、调整值存储器43k、以及边缘度存储器43l。
[0093]
头传感器值环缓冲器43a是存储经模拟/数字(analog/digital,a/d)转换的头振动传感器28的输出值的过去5毫秒量的缓冲器。轮圈传感器值环缓冲器43b是存储经a/d转换的轮圈振动传感器32的输出值的过去5毫秒量的缓冲器。压敏传感器值环缓冲器43c是存储经a/d转换的压敏传感器24的输出值的过去5毫秒量的缓冲器。
[0094]
头传感器值环缓冲器43a及轮圈传感器值环缓冲器43b在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即以“0”填充而初始化。压敏传感器值环缓冲器43c在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即以无效的值填充而初始化。无效的值是压敏传感器24的结构上无法获取的值。在本实施方式中,将大于压敏传感器24的最大值1024的值1025设为无效的值,而在初始化时保存在压敏传感器值环缓冲器43c。
[0095]
在图6的(b)的定期处理中,将压敏传感器24、头振动传感器28及轮圈振动传感器32(以下,表示为“各传感器24、传感器28、传感器32”)中的、定期处理被执行的时间点的传感器值(输出值)追加至相应的头传感器值环缓冲器43a、轮圈传感器值环缓冲器43b及压敏传感器值环缓冲器43c(以下,表示为“各环缓冲器43a、环缓冲器43b、环缓冲器43c”)(图6的(b),s10)。
[0096]
在各环缓冲器43a、环缓冲器43b、环缓冲器43c,设置有存储50个各传感器24、传感器28、传感器32的输出值的存储器、以及存储50个输出值中的最新的输出值为哪个的存储器。这是因为后述的图7的定期处理是每100微秒=0.1毫秒执行,并且存储过去5毫秒量的输出值。
[0097]
首先,各环缓冲器43a、环缓冲器43b、环缓冲器43c以no.1~no.50的顺序存储所获取的各个输出值。然后,当在no.50存储了各个输出值后,再次从no.1起依次存储输出值。由此,成为在各环缓冲器43a、环缓冲器43b、环缓冲器43c存储最大过去5毫秒量的输出值的状
态。使用所述各环缓冲器43a、环缓冲器43b、环缓冲器43c的值,获取头振动传感器28的峰值pzhm、轮圈振动传感器32的峰值pzrm、压敏传感器24的峰值pm、作为头振动传感器28的初始半波的间距的间距特征量x3。
[0098]
基准值计算环缓冲器43d是为了计算压敏传感器24的基准值,存储八个基本上为每1秒所获取的压敏传感器24的输出值的缓冲器。再者,存储在基准值计算环缓冲器43d的压敏传感器24的输出值与存储在压敏传感器值环缓冲器43c的压敏传感器24的输出值不同。存储在基准值计算环缓冲器43d的压敏传感器24的输出值是对在定期处理中每0.1毫秒存储在压敏传感器值环缓冲器43c的压敏传感器24的输出值中的过去0.8毫秒量进行平均而得的值。以下,将存储在基准值计算环缓冲器43d的压敏传感器24的输出值称为压敏传感器24的平均输出值。压敏传感器24的平均输出值可以说是去除了压敏传感器24的电噪声的输出值。
[0099]
基准值计算环缓冲器43d在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即以“0”填充而初始化。然后,在图6的(b)的定期处理中,在击打面20a未被按压而按入标记43h为断开,并且从上次的更新起经过1秒以上、或从击打面20a被打击起经过10秒以上的情况下,将在所述定期处理时更新的压敏传感器24的平均输出值(平均值存储器43e的值)追加至基准值计算环缓冲器43d(图6的(b),s24)。
[0100]
在基准值计算环缓冲器43d中,设置有存储八个压敏传感器24的平均输出值的存储器。首先,基准值计算环缓冲器43d以no.1~no.8的顺序存储所获取的平均输出值。然后,当在no.8存储了平均输出值后,再次从no.1起依次存储平均输出值。
[0101]
平均值存储器43e是存储压敏传感器24的平均输出值的存储器。平均值存储器43e的值在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即初始化为“0”。然后,在图6的(b)的定期处理中,在将新的压敏传感器24的输出值每0.1毫秒存储在压敏传感器值环缓冲器43c之后,对过去0.8毫秒量的压敏传感器24的输出值进行平均来计算压敏传感器24的平均输出值,并将所述压敏传感器24的平均输出值存储在平均值存储器43e(图6的(b),s12)。
[0102]
基准值存储器43f是存储压敏传感器24的基准值的存储器。基准值存储器43f的值在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即以无效的值初始化。所谓无效的值,是压敏传感器24的结构上无法获取的值。然后,在图6的(b)的定期处理中,在将新的压敏传感器24的平均输出值存储在基准值计算环缓冲器43d之后,对基准值计算环缓冲器43d的八个值进行平均来计算压敏传感器24的基准值,并将所述基准值保存在基准值存储器43f(图6的(b),s22)。
[0103]
如图5的(a)所示,压敏传感器24的输出值有时在打击或按压了击打面20a的前后变动。这是因为夹入压敏传感器24与击打面20a之间的弹性体26的变形的方式或击打面20a的返回方式等发生变化。另外,压敏传感器24的输出值还根据施加至头20的张力或外部气温等而变动。
[0104]
因此,在图6的(b)的定期处理中,需要按照每个规定的更新时间更新压敏传感器24的基准值。例如,具体而言,若使用图5的(a)进行说明,则在打击击打面20a之前,压敏传感器24的输出值遵循基准值b1,在打击了击打面20a之后,压敏传感器24的输出值稳定为比基准值b1低的值。因此,将基准值b2设置在新稳定的压敏传感器24的输出值所遵循的位置。
[0105]
再者,所谓压敏传感器24的输出值稳定,是指压敏传感器24的输出值大致一定,具体而言,是压敏传感器24的输出值的变化率成为5%以内。此处,从强力地按压击打面20a的状态瞬间解除按压,直至压敏传感器24的输出值最低(直到不变化),从解除按压起到压敏传感器24的输出值稳定为止的稳定时间在本实施方式的电子打击乐器1中约为10秒。
[0106]
返回图3。打击处理标记43g是表示基于对击打面20a的打击的打击检测处理中的标记。打击处理标记43g在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即设定为表示并非打击检测处理中的断开。在图6的(b)的定期处理中,在头传感器值环缓冲器43a的最新值(当前的头振动传感器28的输出值)的绝对值超过打击阈值n1的情况下,打击处理标记43g设定为接通(图6的(b),s26)。另外,在打击检测结束的定期处理中,打击处理标记43g设为断开(图8,s53)。
[0107]
按入标记43h是表示击打面20a被按压的标记。按入标记43h在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即设定为表示击打面20a未被按压的断开。在图6的(b)的定期处理中执行的图7的按入检测处理中,当在按入标记43h为断开的期间基准值与压敏传感器24的平均输出值之差大于按压阈值n2持续10毫秒时,按入标记43h设定为接通(图7,s40)。另外,当在按入标记43h为接通的期间基准值与压敏传感器24的平均输出值之差为按压阈值n2以下持续1毫秒时,按入标记43h设定为断开(图7,s47)。
[0108]
按入值存储器43i是存储作为由击打面20a的按压引起的压敏传感器24的输出值的变动量的按入值的存储器。按入值存储器43i的值在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即初始化为“0”。在图7的按入检测处理中,在基准值与压敏传感器24的平均输出值之差大于按压阈值n2,且从基准值减去按压阈值n2与压敏传感器24的平均输出值而得的值大于可动阈值n3的情况下,将作为按入值的最大值的127存储在按入值存储器43i(图7,s35)。另外,在基准值与压敏传感器24的平均输出值之差大于按压阈值n2,且从基准值减去按压阈值n2与压敏传感器24的平均输出值而得的值为可动阈值n3以下的情况下,将从基准值减去按压阈值n2与压敏传感器24的平均输出值而得的值乘以127且除以可动阈值n3来计算按入值,并将所述按入值存储在按入值存储器43i(图7,s36)。
[0109]
可动阈值n3是作为按入值的可移动量而要确保的范围。在从基准值减去按压阈值n2与压敏传感器24的平均输出值而得的值为可动阈值n3以下的情况下存储在按入值存储器43i的按入值是乘以127来计算,由此可在从基准值减去按压阈值n2而得的值与基于可动阈值n3取按入值的最大值的压敏传感器24的平均输出值之间分割为127个阶段。由此,可将按入值以127个阶段的电平输出至音源45等。
[0110]
特征量存储器43j是分别存储所述各特征量x1、特征量x2、特征量x3的存储器。特征量存储器43j的值在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即初始化为“0”。在从击打面20a被打击之后立即开始的图8的打击检测处理中,计算各特征量x1、特征量x2、特征量x3并存储在特征量存储器43j(图8,s55、s56、s57)。
[0111]
调整值存储器43k是存储峰值比特征量x1的计算中所使用的用户参数的存储器。调整值存储器43k的值在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即初始化为“1”。调整值存储器43k的用户参数通过操作操作件15来变更。再者,也可将电子打击乐器1的电源接通时或执行了图6的(a)的初始化处理后未立即初始化的闪速存储器设置在控制装置40,在所述闪速存储器内设置调整值存储器43k。
[0112]
若调整值存储器43k的用户参数大于1,则峰值比特征量x1的值变大,而边缘度e容易接近0,从而可容易发出打击了击打面20a的中央部时的乐音。若调整值存储器43k的值小于1,则峰值比特征量x1的值变小,而边缘度e容易接近1,从而可容易发出打击了击打面20a的周边部时的乐音。
[0113]
边缘度存储器43l是存储表示打击位置的边缘度e的存储器。边缘度存储器43l的值在电子打击乐器1的电源接通时及执行了图6的(a)的初始化处理之后,立即初始化为“0”。在从击打面20a被打击之后立即开始的图8的打击检测处理中,使用存储在特征量存储器43j的各特征量x1、特征量x2、特征量x3及存储在加权系数数据42b的加权系数w1、加权系数w2、加权系数w3、加权系数b来计算边缘度e,并将边缘度e存储在边缘度存储器43l(图8,s58、s59)。
[0114]
参照图6的(a)对电子打击乐器1的cpu 41所执行的初始化处理进行说明。图6的(a)是初始化处理的流程图。初始化处理是在电子打击乐器1的电源接通之后立即执行,并进行ram 43上的各存储器值(变量)及标记的初始化(s1)。特别是在初始化处理中,以无效的值填充压敏传感器值环缓冲器43c,并将无效的值保存在基准值存储器43f。另外,在初始化处理中,将后述的基准值更新计时器t1、按入值更新计时器t2、按入切换计时器t3、打击计时器t4初始化为“0秒”。
[0115]
接下来,参照6的(b)至图8对电子打击乐器1的cpu 41所执行的定期处理进行说明。在定期处理中,执行定期处理被执行的时间点的、各传感器24、传感器28、传感器32的输出值的获取、或基准值的更新、按入检测处理(图7)、打击检测处理(图8),并进行乐音的发音指示。定期处理通过每0.1毫秒的间隔(interval)中断处理,每0.1毫秒重复执行。
[0116]
图6的(b)是定期处理的流程图。在定期处理中,首先,获取各传感器24、传感器28、传感器32的传感器值(输出值),并分别追加至各环缓冲器43a、环缓冲器43b、环缓冲器43c(s10)。由于定期处理是每0.1毫秒执行,因此各环缓冲器43a、环缓冲器43b、环缓冲器43c的值每0.1毫秒更新。
[0117]
在s10的处理之后,确认在压敏传感器值环缓冲器43c中是否保存有八个以上(过去0.8毫秒量)有效的值(s11)。再者,所谓有效的值,是压敏传感器24能够获取的0~1024为止的值。当在压敏传感器值环缓冲器43c中未保存八个以上有效的值时(s11:否(no)),结束定期处理,并进行等待,直至在压敏传感器值环缓冲器43c中保存八个以上有效的值,即,直至从初始化处理起经过0.8毫秒以上。
[0118]
当在压敏传感器值环缓冲器43c中保存有八个以上有效的值时(s11:是(yes)),参照压敏传感器值环缓冲器43c的值,从当前的定期处理进行追溯而对0.8毫秒量的压敏传感器24的值进行平均,计算压敏传感器24的平均输出值,并保存在平均值存储器43e(s12)。由此,获得去除了电噪声的压敏传感器24的输出值(平均输出值)。
[0119]
在s12的处理后,确认基准值存储器43f的值是否是有效的值(s13)。所谓有效的值,是压敏传感器24能够获取的0~1024为止的值。在初始化处理中,在基准值存储器43f中保存有无效的值,因此,在初始化处理后的第一次的s13的处理中,基准值存储器43f的值并非有效的值(s13:否)。在此情况下,以平均值存储器43e的平均输出值填充基准值计算环缓冲器43d(s14)。其后,以将对基准值计算环缓冲器43d的值进行平均而得的基准值保存在基准值存储器43f的方式将平均值存储器43e的平均输出值保存在基准值存储器43f(s15)。继
而,在表示到下一次更新基准值存储器43f的值为止的时间的基准值更新计时器t1设定1秒(s16)。
[0120]
在s13的处理中,在基准值存储器43f的值是有效的值的情况下(s13:是),执行按入检测处理(s17)。在按入检测处理中,在击打面20a被按压的情况下将按入标记43h设为接通,在击打面20a未被按压的情况下将按入标记43h设为断开,关于详细情况参照图7在后面叙述。
[0121]
在s17的处理后,确认表示基于对击打面20a的打击的图8的打击检测处理开始的打击处理标记43g是否为断开(s18)。在打击处理标记43g为断开的情况下(s18:是),确认头传感器值环缓冲器43a的最新值的绝对值,即,当前的定期处理开始时的头振动传感器28的输出值的绝对值是否为打击阈值n1以下(s19)。在头传感器值环缓冲器43a的最新值的绝对值为打击阈值n1以下的情况下(s19:是),击打面20a未被打击,因此确认表示击打面20a被按压的按入标记43h是否为断开(s20)。
[0122]
在按入标记43h为断开的情况下(s20:是),从基准值更新计时器t1减去0.1毫秒(s21)。在s21的处理后,确认基准值更新计时器t1是否成为0秒以下(s22)。在基准值更新计时器t1大于0秒的情况下(s22:否),更新基准值存储器43f的值后,下一次更新所述值的时机未到来,因此结束定期处理。
[0123]
在基准值更新计时器t1成为0秒以下的情况下(s22:是),在基准值更新计时器t1设定1秒(s23),将保存在平均值存储器43e的压敏传感器24的平均输出值追加至基准值计算环缓冲器43d(s24)。继而,对存储在基准值计算环缓冲器43d的合计八个压敏传感器24的平均输出值进行平均来计算基准值,并将所述基准值保存在基准值存储器43f(s25),而结束定期处理。
[0124]
如此,基本上每1秒对基准值计算环缓冲器43d追加压敏传感器24的平均输出值,并在所述追加后对基准值计算环缓冲器43d的值进行平均来计算基准值,因此存储在基准值存储器43f的基准值基本上按照每1秒的更新时间更新。另外,对基本上每1秒更新的八个压敏传感器24的平均输出值进行平均,因此对在8秒的采样时间中获取的压敏传感器24的输出值进行平均来计算基准值。
[0125]
当在s20的处理中按入标记43h为接通时(s20:否),击打面20a被按压,因此在基准值更新计时器t1设定1秒(s29),从解除对击打面20a的按压起到经过1秒为止,禁止基准值存储器43f的基准值的更新。通过在击打面20a被按压的期间禁止基准值的更新,可防止基于压敏传感器24的平均输出值相对于基准值的变化量的按入值因基准值的更新而变动。其结果,可获取适当的按入值。进而,通过在击打面20a的按压解除后禁止基准值的更新,可在不使用根据伴随按压解除的击打面20a的振动而容易变动的压敏传感器24的平均输出值的情况下更新基准值存储器43f的基准值,因此可适当地设定基准值。
[0126]
在s19的处理中,在头传感器值环缓冲器43a的最新值的绝对值大于打击阈值n1的情况下(s19:是),击打面20a被打击,因此将打击处理标记43g设为接通(s26)。继而,在基准值更新计时器t1设定10秒(s27),并执行打击检测处理(s28),而结束定期处理。关于打击检测处理,参照图8在后面叙述。另外,在s18的处理中,在打击处理标记43g为接通的情况下(s18:否),执行打击检测处理(s28),而结束定期处理。
[0127]
如此,从击打面20a被打击时起,到经过击打面20a的振动充分衰减为止的稳定时
间即10秒为止,不对基准值计算环缓冲器43d追加新的压敏传感器24的平均输出值,禁止基准值存储器43f的基准值的更新。其结果,可在不使用根据打击后大幅地振动的击打面20a而容易变动的压敏传感器24的平均输出值的情况下更新基准值存储器43f的基准值,因此可适当地设定基准值。
[0128]
接下来,参照图7对图6的(b)的定期处理中所执行的按入检测处理(s17)进行说明。按入检测处理判断击打面20a是否被按压,在击打面20a被按压的情况下计算按入值。更具体而言,在按入检测处理(按入检测部件)中,基于压敏传感器24的平均输出值与基准值之差来检测对击打面20a的按压(按压的有无或按入值)。
[0129]
首先,按入检测处理确认从基准值存储器43f的基准值减去平均值存储器43e的平均输出值而得的差是否大于按压阈值n2(s30)。在从基准值存储器43f的基准值减去平均值存储器43e的平均输出值而得的差大于按压阈值n2的情况下(s30:是),存在击打面20a被按压的可能性,因此执行从s31到s36的处理,并计算按入值。
[0130]
在s31的处理中,对通过初始化处理等而初始化为0秒的按入值更新计时器t2加上0.1毫秒。按入值更新计时器t2表示在判断为存在击打面20a被按压的可能性的期间(s30:是),到下一次更新按入值为止的时间。在s31的处理后,确认按入值更新计时器t2是否为1毫秒(s32)。在按入值更新计时器t2小于1毫秒的情况下(s32:否),下一次更新按入值的时机未到来,因此跳过从s33至s36的处理。
[0131]
在按入值更新计时器t2为1毫秒的情况下(s32:是),平均值存储器43e的平均输出值的降低是由对击打面20a的按压引起的可能性高,且更新按入值的时机到来,因此,首先,为了更新下一个按入值而将按入值更新计时器t2初始化为0秒(s33)。在s33的处理后,确认从基准值存储器43f的基准值减去按压阈值n2与平均值存储器43e的平均输出值而得的值大于可动阈值n3(s34)。
[0132]
在从基准值存储器43f的基准值减去按压阈值n2与平均值存储器43e的平均输出值而得的值大于可动阈值n3的情况下(s34:是),击打面20a被充分强力地按压,因此将作为按入值的最大值的127保存在按入值存储器43i(s35)。
[0133]
另一方面,在从基准值存储器43f的基准值减去按压阈值n2与平均值存储器43e的平均输出值而得的值为可动阈值n3以下的情况下(s34:否),为了以127个阶段的电平表示按入值,将由“(基准值存储器43f的基准值-按压阈值n2-平均值存储器43e的平均输出值)
×
127/可动阈值n3”的式子表示的按入值保存在按入值存储器43i(s36)。由此,能够进行与127个阶段的电平对应的乐音的控制。
[0134]
在s30的处理中,在基于平均值存储器43e的平均输出值的降低而存在击打面20a被按压的可能性的情况下(s30:是),执行s31到s36的处理之后,确认表示击打面20a被按压的按入标记43h是否为断开(s37)。在按入标记43h为接通的情况下(s37:否),不需要切换按入标记43h,因此将按入切换计时器t3初始化为0秒(s42),而结束按入检测处理。
[0135]
在按入标记43h为断开的情况下(s37:是),为了判断平均值存储器43e的平均输出值的降低是由按压引起还是由打击引起,首先,对通过初始化处理等而初始化为0秒的按入切换计时器t3加上0.1毫秒(s38)。按入切换计时器t3表示到伴随平均值存储器43e的平均输出值的变化而切换按入标记43h为止的时间。
[0136]
在s38的处理后,确认按入切换计时器t3是否为10毫秒(s39)。在按入切换计时器
t3小于10毫秒的情况下(s39:否),存在平均值存储器43e的平均输出值的降低是由打击引起的可能性,因此结束按入检测处理。
[0137]
在按入切换计时器t3为10毫秒的情况下(s39:是),平均值存储器43e的平均输出值在10毫秒期间持续降低,因此判断为所述平均输出值的降低是由按压引起,将按入标记43h设为接通(s40),将按入切换计时器t3初始化为0秒(s41),而结束按入检测处理。
[0138]
在s30的处理中,在从基准值存储器43f的基准值减去平均值存储器43e的平均输出值而得的差成为按压阈值n2以下的情况下(s30:否),存在击打面20a未被按压的可能性,因此将按入值更新计时器t2初始化为0秒(s43)。设为存在通过到上次为止的定期处理而击打面20a被按压的可能性(s30:是),在开始利用按入值更新计时器t2计时的情况下,到开始利用按入值更新计时器t2计时为止的定期处理中的平均值存储器43e的平均输出值的降低并非是由对击打面20a的按压引起,由对击打面20a的打击引起的可能性高,因此将按入值更新计时器t2初始化不计算按入值。
[0139]
在s43的处理后,确认按入标记43h是否为接通(s44)。在存在击打面20a未被按压的可能性(s30:否),且按入标记43h为断开的情况下(s44:否),不需要切换按入标记43h,因此将按入切换计时器t3初始化为0秒(s42),而结束按入检测处理。
[0140]
再者,设为存在通过到上次为止的定期处理而击打面20a被按压的可能性(s30:是),在为了切换按入标记43h而开始利用按入切换计时器t3计时的情况下,到开始利用按入切换计时器t3计时为止的定期处理中的平均值存储器43e的平均输出值的降低并非是由对击打面20a的按压引起,由对击打面20a的打击引起的可能性高,因此将按入切换计时器t3初始化以备下一个按入标记43h的切换。
[0141]
在s44的处理中,在按入标记43h为接通的情况下(s44:是),为了判断平均值存储器43e的平均输出值的上升是否是由按压解除引起,首先,对按入切换计时器t3加上0.1毫秒(s45)。
[0142]
在s45的处理后,确认按入切换计时器t3是否为1毫秒(s46)。在按入切换计时器t3小于1毫秒的情况下(s46:否),存在平均值存储器43e的平均输出值的上升是由对击打面20a的打击或噪声引起的可能性,因此结束按入检测处理。
[0143]
再者,在通过s45、s46的处理开始利用按入切换计时器t3计时之后的定期处理中,当在按入切换计时器t3成为1毫秒之前,从基准值存储器43f的基准值减去平均值存储器43e的平均输出值而得的差大于按压阈值n2时(s30:是),在s42的处理中将按入切换计时器t3初始化为0秒,而结束按入检测处理。
[0144]
在s46的处理中,在按入切换计时器t3为1毫秒的情况下(s46:是),平均值存储器43e的平均输出值在1毫秒期间持续上升毫秒,因此判断为所述平均输出值的上升是由按压解除引起,将按入标记43h设为断开(s47),将按入切换计时器t3初始化为0秒(s48),而结束按入检测处理。
[0145]
如上所述,在按入检测处理中,在将按入标记43h从断开切换为接通时等待10毫秒,将按入标记43h从接通切换为断开时等待1毫秒。即使在按压击打面20a的状态下打击击打面20a,击打面20a也难以振动,因此,压敏传感器24的平均输出值难以上升,击打面20a的振动提前衰减。相反,当在未按压击打面20a的状态下打击击打面20a时,击打面20a容易振动,到所述振动充分衰减为止的时间长。因而,通过缩短将按入标记43h从导通切换为断开
时的等待时间可提高响应性,并且通过延长将按入标记43h从断开切换为接通时的等待时间,可确实地判断击打面20a被按压。
[0146]
接下来,参照图8对图6的(b)的定期处理中所执行的打击检测处理(s28)进行说明。打击检测处理是基于对击打面20a的打击而执行的处理,且计算对击打面20a的打击位置,并输出乐音的发音指示。
[0147]
首先,打击检测处理对通过初始化处理等而初始化为0秒的打击计时器t4加上0.1毫秒(s50)。打击计时器t4表示从头传感器值环缓冲器43a的最新值的绝对值超过打击阈值n1后(图6的(b),s20:是)的经过时间。
[0148]
在s50的处理后,确认打击计时器t4是否为5毫秒(s51)。在打击计时器t4小于5毫秒的情况下(s51:否),未经过获取各传感器24、传感器28、传感器32的峰值所需要的时间,因此跳过s52至s60的处理,而结束打击检测处理。
[0149]
在s51的处理中,在打击计时器t4为5毫秒的情况下(s51:是),经过获取各传感器24、传感器28、传感器32的峰值所需要的时间,因此,首先,为下一次击打面20a被打击而执行打击检测处理时准备,将打击计时器t4初始化为0秒(s52),并将打击处理标记43g设为断开(s53)。
[0150]
在s53的处理后,获取从各环缓冲器43a、环缓冲器43b、环缓冲器43c的值起5毫秒以内的、头振动传感器28的峰值pzhm、轮圈振动传感器32的峰值pzrm及压敏传感器24的峰值pm(s54,峰值获取部件)。继而,基于“峰值比特征量x1=峰值pzhm
×
调整值存储器43k的用户参数/峰值pzrm”的式子来计算峰值比特征量x1,并保存在特征量存储器43j(s55)。
[0151]
在s55的处理后,基于“压敏峰值特征量x2=基准值存储器43f的基准值-峰值pm”的式子来计算压敏峰值特征量x2,并保存在特征量存储器43j(s56)。其后,根据头传感器值环缓冲器43a的值来计算头振动传感器28的初始半波的间距作为间距特征量x3,并保存在特征量存储器43j(s57,间距获取部件)。
[0152]
在s57的处理后,使用保存在特征量存储器43j的各特征量x1、特征量x2、特征量x3及保存在加权系数数据42b的加权系数w1、加权系数w2、加权系数w3、加权系数b,根据“a=w1
×
x1 w2
×
x2 w3
×
x3 b”的式子计算假想边缘度a(s58)。继而,将假想边缘度a代入标准s型函数,来计算由“e=1/(1 exp(-a))”表示的边缘度e,并保存在边缘度存储器43l(s59)。所述s54~s59为止的处理是根据各传感器24、传感器28、传感器32的输出值来计算打击位置的位置计算部件(位置计算步骤)。
[0153]
在s59的处理后,将与边缘度存储器43l的边缘度e、按入标记43h的状态、按入值存储器43i的按入值、各环缓冲器43a、环缓冲器43b、环缓冲器43c的值对应的乐音的发音指示输出至音源45(s60),结束打击检测处理。
[0154]
音源45根据各环缓冲器43a、环缓冲器43b、环缓冲器43c的值来计算对击打面20a的打击的强度或击打面20a的振动状态,并输出与所述打击的强度或振动状态对应的乐音信号。另外,音源45在按入标记43h为断开的情况下,输出击打面20a未被按压的通常的乐音信号。另一方面,音源45在按入标记43h为接通的情况下,根据按入值,输出击打面20a的振动提前衰减那样的乐音信号。
[0155]
音源45在边缘度e为0的情况下输出击打面20a的中央部被打击时的乐音信号,在边缘度e为1的情况下输出击打面20a的周边部被打击时的乐音信号。在边缘度e为从0到1之
间的情况下,音源45输出从0到边缘度e为止的大小与从边缘度e到1为止的大小之比、和中央部被打击时的乐音与周边部被打击时的乐音的音量比相同那样的乐音信号。
[0156]
如上所述那样的电子打击乐器(乐音生成装置)1中,弹性体26在击打面20a与压敏传感器24之间被压缩,因此在击打面20a与压敏传感器24之间不存在游隙,从而即使不强力地按压击打面20a,也可使压敏传感器24的输出值变化。通过不存在游隙,即使不按压或打击击打面20a,压敏传感器24的输出值也不变动,因此,当用于判断击打面20a是否被按压或用于计算击打面20a的按入量(按入值)的基准值为一定时,难以正确地进行按压的判断或按入值的计算。
[0157]
然而,在本实施方式中,基本上按照设定在基准值更新计时器t1的每1秒的更新时间,根据压敏传感器24的输出值来更新压敏传感器24的基准值。由此,可正确地进行按压的判断或按入值的计算。其结果,可提高对击打面20a的按压的灵敏度。
[0158]
设定在基准值更新计时器t1的1秒的更新时间是本实施方式的电子打击乐器1的稳定时间即约10秒的0.1倍。再者,所谓稳定时间,如上所述,是从强力地按压击打面20a的状态瞬间解除按压直至压敏传感器24的输出值最低(直至不变化),从解除按压起到压敏传感器24的输出值稳定为止的时间。压敏传感器24的输出值容易在击打面20a的打击之后或按压解除之后立即大幅地变动,稳定时间越长所述变动大的时间段越长。因此,通过将更新时间设为稳定时间的0.1倍以上,可难以获取在击打面20a的打击之后或按压解除之后立即大幅地变动的压敏传感器24的输出值,从而可适当地设定基准值。其结果,可进一步提高对击打面20a的按压的灵敏度。
[0159]
另外,优选为将更新时间设为稳定时间的0.5倍以下,更优选为将更新时间设为稳定时间的0.3倍以下。更新时间越短,越可使基准值提前接近压敏传感器24稳定的值,因此可提高对击打面20a的按压的灵敏度。
[0160]
基准值是在定期处理的规定的时机,对保存在基准值计算环缓冲器43d的压敏传感器24的平均输出值进行平均来计算。即,对在规定的采样时间中获取的压敏传感器24的平均输出值进行平均来计算基准值。由此,即使由于击打面20a的打击后或按压的解除后的击打面20a的振动或各种噪声而压敏传感器24的输出值暂时大幅变动,也可通过对所述输出值进行平均来计算基准值,而适当地设定基准值。
[0161]
在基准值计算环缓冲器(存储部件)43d中,按照每个更新时间存储(保存)压敏传感器24的平均输出值。由此,当成为更新时间后存储新的压敏传感器24的平均输出值,并通过将所述新存储的平均输出值与过去存储的压敏传感器24的平均输出值进行平均,可计算基准值。因此,可在采样时间中不持续存储压敏传感器24的平均输出值,因此可减少压敏传感器24的平均输出值存储容量。
[0162]
在基准值计算环缓冲器43d中存储八个压敏传感器24的平均输出值,新的平均输出值按照每1秒的更新时间存储在基准值计算环缓冲器43d,因此基本的采样时间成为8秒。8秒的采样时间是10秒的稳定时间的0.8倍。
[0163]
若采样时间为从击打面20a摆动最大的状态到稳定为止的稳定时间的0.8倍以上,则相对于稳定时间可充分长地取得采样时间。由此,即使在采样时间中击打面20a暂时大幅振动,也可获取所述振动充分衰减时的压敏传感器24的输出值。因此,可更适当地设定基准值。
[0164]
另外,优选为将采样时间设为稳定时间的2倍以下,更优选为将采样时间设为稳定时间的1.5倍以下。采样时间越短,越难以使用打击前的压敏传感器24稳定的值,越容易使用打击后的压敏传感器24稳定的值,因此可更适当地设定基准值。
[0165]
电子打击乐器1从击打面20a被打击时起到经过10秒的稳定时间为止,禁止基准值的更新。其结果,可在不使用因打击后大幅地振动的击打面20a而容易变动的压敏传感器24的平均输出值的情况下更新基准值,因此可适当地设定基准值。
[0166]
从击打面20a被打击时起的基准值的更新的禁止是通过将表示到下一次更新基准值为止的时间的基准值更新计时器t1的更新时间在打击后暂时设定为10秒来执行。由此,可简化用于禁止基准值的更新的处理。
[0167]
另外,也可从击打面20a被打击时起到经过稳定时间以上为止,禁止基准值的更新。优选为到经过稳定时间的2倍以下为止禁止基准值的更新,更优选为到经过稳定时间的1.3倍以下为止禁止基准值的更新。通过缩短禁止基准值的更新的时间,可在击打面20a被连续打击时,缩短无法进行基准值的更新的时间段,从而可适当地设定基准值。
[0168]
电子打击乐器1在击打面20a被按压的期间、与从解除对击打面20a的按压起经过1秒为止,禁止基准值的更新。由此,如上所述,可获取适当的按入值,并且可适当地设定基准值。所述基准值的更新的禁止是通过在击打面20a被按压的期间的定期处理中,将表示到下一次更新基准值为止的时间的基准值更新计时器t1的更新时间设定为每次1秒来执行。由此,可简化用于禁止基准值的更新的处理。
[0169]
进而,在击打面20a被按压的期间或打击处理中,在每次的定期处理中不从基准值更新计时器t1减去0.1毫秒,由此禁止在击打面20a被按压的期间或打击后基准值的更新。其结果,可进一步简化用于禁止基准值的更新的处理。
[0170]
另外,也可在对击打面20a的按压解除后,到经过稳定时间的0.1倍(在本实施方式中为1秒)以上为止,禁止基准值的更新。按压解除后的击打面20a的振动比击打面20a被打击时的振动小而容易提前衰减,因此,若在对击打面20a的按压解除后禁止基准值的更新的时间为稳定时间的0.1倍以上,则可适当地设定基准值。
[0171]
进而,在对击打面20a的按压解除后禁止基准值的更新的时间优选为稳定时间的0.5倍以下,更优选为稳定时间的0.3倍以下。通过缩短禁止基准值的更新的时间,可提高在对击打面20a的按压解除后更新基准值的响应性。
[0172]
电子打击乐器1根据压敏传感器24的输出值、头振动传感器28的输出值、及轮圈振动传感器32的输出值来计算对击打面20a的打击位置。压敏传感器24检测对击打面20a的中央部的按压,因此,打击位置越接近中央部,压敏传感器24的输出值越容易变大。头振动传感器28检测击打面20a的周边部而不是中央部的振动,因此可容易使与打击位置对应的压敏传感器24的输出值和头振动传感器28的输出值不同。进而,在俯视时头振动传感器28与轮圈振动传感器32重叠,因此容易使它们的输出值之比在每个打击位置接近一定。电子打击乐器1通过利用这些输出值,即使打击位置扩大或成为多个,也可提高打击位置的检测精度。特别是电子打击乐器1可模拟打击位置容易扩大或成为多个的用手打击击打面20a的康茄鼓(conga)或邦戈鼓等的演奏法。
[0173]
进而,电子打击乐器1根据作为头振动传感器28的峰值pzhm与轮圈振动传感器32的峰值pzrm之比的峰值比特征量x1、作为压敏传感器24相对于基准值的位移量的峰值的压
敏峰值特征量x2、作为头振动传感器28的初始半波的间距的间距特征量x3,来计算作为打击位置的边缘度e。如上所述,所述各特征量x1、特征量x2、特征量x3根据打击位置而容易变化。通过利用各特征量x1、特征量x2、特征量x3来计算边缘度e,可提高打击位置的检测精度。
[0174]
特别是当计算边缘度e时,利用针对电子打击乐器1的每个产品设计而计算,并基于电子打击乐器1的形状等决定的加权系数w1、加权系数w2、加权系数w3、加权系数b。具体而言,基于将分别表示各特征量x1、特征量x2、特征量x3的重要度的加权系数w1、加权系数w2、加权系数w3与对应的各特征量x1、特征量x2、特征量x3的积相加,进而加上作为常数项的加权系数b而得的假想边缘度a来计算边缘度e。由此,可进一步针对电子打击乐器1的每个产品设计,即,电子打击乐器1的每个形状提高打击位置的检测精度。进而,加权系数w1、加权系数w2、加权系数w3、加权系数b是实际打击设计阶段的电子打击乐器1而计算,因此,即使打击位置扩大或成为多个,也可进一步提高打击位置的检测精度。
[0175]
将假想边缘度a代入标准s型函数而计算出的边缘度e取0以上、1以下的数值。因此,在边缘度e为0到1之间的数值的情况下,根据所述数值之间的比,在输出将击打面20a的中央部被打击时的乐音信号与周边部被打击时的乐音信号混合而成的乐音信号时,容易设定所述乐音信号的音量比。
[0176]
接下来,参照图9的(a)及图9的(b)至图11对第二实施方式进行说明。在第一实施方式中,对模拟邦戈鼓的电子打击乐器1进行了说明。与此相对,在第二实施方式中,对进行对电子乐器等的输入的midi控制器(乐音生成装置)80进行说明。再者,对与在第一实施方式中说明的部分相同的部分标注相同的标号,并省略以下的说明。
[0177]
首先,参照图9的(a)及图9的(b)对midi控制器80的整体结构进行说明。图9的(a)是第二实施方式中的midi控制器80的平面图。图9的(b)是图9的(a)的ixb-ixb线的midi控制器80的剖面图。再者,为了容易理解,将图9的(a)的纸面左侧、纸面右侧、纸面下侧、纸面上侧分别设为midi控制器80的左方、右方、正面侧(演奏者侧)、背面侧,将图9的(b)的纸面上侧、纸面下侧分别设为midi控制器80的上方、下方。
[0178]
如图9的(a)所示,midi控制器80是利用压敏传感器(打击检测部件)24检测打击(按压)了击打面83的情况,并将基于所述打击的指示输出至外部的装置。midi控制器80包括:长方体状的框体81、在框体81的左右两侧设置的多个操作件82、在框体81设置的16个击打面83、在上表面形成有所述击打面83的16个弹性体84、以及检测对击打面83的打击的压敏传感器24。再者,在图9的(a)中,用两点划线包围设置有多个操作件82的区域,省略各操作件82的图示。16个击打面83及弹性体84排列成4行
×
4列。再者,在图9的(a)中,仅对左下的一个击打面83及弹性体84标注符号。
[0179]
如图9的(b)所示,在框体81的上表面,在与击打面83对应的位置形成有开口孔81a。在框体81的内部,内置有输出打击指示的控制装置90。在控制装置90的上表面,以位于比开口孔81a的内周缘更靠内侧的方式设置有压敏传感器24。
[0180]
弹性体84是覆盖压敏传感器24的上方的橡胶制的构件。弹性体84从开口孔81a向上方伸出,并通过向上方伸出的弹性体84的上表面形成击打面83。与开口孔81a的边缘的框体81的内侧抵接的橡胶膜85从弹性体84的侧面延伸。通过橡胶膜85与框体81的内侧抵接,来限制弹性体84向上方的位移。
[0181]
在所述向上方的位移受到限制的状态下,弹性体84压附在压敏传感器24。在图9的(b)中,用两点划线示出了未施加载荷的状态下的弹性体84。当击打面83被打击时,压敏传感器24经由弹性体84被按压,压敏传感器24检测所述打击。与压敏传感器24抵接的弹性体84的下表面以越强力地压附在压敏传感器24,压敏传感器24与弹性体84的接触面积越增加的方式形成为朝向下方前端变细的形状。由此,可根据击打面83的打击的强度而使压敏传感器24的输出值容易变动。
[0182]
进而,弹性体84在击打面83与压敏传感器24之间被压缩,因此在击打面83与压敏传感器24之间不存在游隙,从而即使不强力地按压击打面83,也可使压敏传感器24的输出值变化。由此,可提高压敏传感器24相对于对击打面83的打击(按压)的灵敏度。
[0183]
在midi控制器80中,从强力地按压击打面83的状态瞬间解除按压直至压敏传感器24的输出值最低(直至不变化),从解除按压起到压敏传感器24的输出值稳定为止的稳定时间约为1秒。在midi控制器80中,在按压解除后振动的部分是与第一实施方式的头20相比难以振动的橡胶制的弹性体84,因此,与第一实施方式的电子打击乐器1的稳定时间相比,midi控制器80的稳定时间短。
[0184]
接下来,参照图10对midi控制器80的电气结构进行说明。图10是表示midi控制器80的电气结构的框图。midi控制器80的控制装置90具有cpu 91、rom 92、以及ram 93,且分别经由总线94而连接。另外,在总线94分别连接有分别设置在16个击打面83各者的16个压敏传感器24、操作件82、以及输出部95。在输出部95连接有个人计算机(personal computer,pc)96,在pc 96连接有扬声器97。
[0185]
在打击了击打面83的情况下,midi控制器80将与基于所述打击的压敏传感器24的检测结果(输出值)对应的打击指示从cpu 41经由输出部95输出至pc 96。在pc 96中,基于来自输出部95的打击指示来制作乐曲,或者在打击指示中追加音色或各种效果。其后,将基于从pc 96输出的乐音信号的乐音从扬声器97放出。
[0186]
cpu 91是控制通过总线94连接的各部的运算装置。rom 92是无法改写的存储器。在rom 92中存储控制程序92a。当通过cpu 91执行控制程序92a时,在midi控制器80的电源接通之后立即执行初始化处理,其后执行定期处理。所述初始化处理与第一实施方式中的图6的(a)的初始化处理相同。
[0187]
ram 93是在cpu 91执行控制程序92a等程序时能够改写地存储各种工作数据或标记等的存储器。在ram 93中分别设置有压敏传感器值环缓冲器43c、基准值计算环缓冲器43d、平均值存储器43e、基准值存储器43f、打击处理标记43g、上次平均值存储器93a、以及打击电平存储器93b。
[0188]
上次平均值存储器93a是在更新平均值存储器43e的值之前,存储此时的平均值存储器43e的值的存储器。上次平均值存储器93a的值在midi控制器80的电源接通时及执行了初始化处理之后,立即初始化为“0”。在图11的定期处理中,在更新平均值存储器43e的值之前,将当前的平均值存储器43e的值保存在上次平均值存储器93a(图11,s72)。
[0189]
打击电平存储器93b是存储打击电平的存储器,所述打击电平将压敏传感器24相对于基准值的位移量的峰值表示为打击的强度。打击电平存储器93b的值在midi控制器80的电源接通时及执行了初始化处理之后,立即初始化为“0”。在图11的定期处理中,在击打面83被打击且经过2毫秒之后,将所述2毫秒以内的压敏传感器24相对于基准值的位移量的
峰值作为打击电平而存储在打击电平存储器93b(图11,s88)。
[0190]
接下来,参照图11对midi控制器80的cpu 91所执行的定期处理进行说明。在定期处理中,执行定期处理被执行的时间点的、压敏传感器24的输出值的获取、或基准值的更新、打击电平的计算。定期处理通过每0.1毫秒的间隔中断处理,每0.1毫秒重复执行。
[0191]
图11是定期处理的流程图。在定期处理中,首先,获取压敏传感器24的传感器值(输出值),并追加至压敏传感器值环缓冲器43c(s70)。由于定期处理是每0.1毫秒执行,因此压敏传感器值环缓冲器43c的值每0.1毫秒更新。
[0192]
在s70的处理之后,确认在压敏传感器值环缓冲器43c中是否保存有八个以上有效的值(s71)。再者,所谓有效的值,是压敏传感器24能够获取的0~1024为止的值。当在压敏传感器值环缓冲器43c中未保存有八个以上有效的值时(s71:否),结束定期处理,并进行等待,直至在压敏传感器值环缓冲器43c中保存八个以上有效的值,即,直至从初始化处理起经过0.8毫秒以上。
[0193]
当在压敏传感器值环缓冲器43c中保存有八个以上有效的值时(s71:是),将平均值存储器43e的值保存在上次平均值存储器93a(s72)。继而,参照压敏传感器值环缓冲器43c的值,从当前的定期处理进行追溯而对0.8毫秒量的压敏传感器24的值进行平均,计算压敏传感器24的平均输出值,并存储在平均值存储器43e(s73)。由此,获得去除了电噪声的压敏传感器24的输出值(平均输出值)。
[0194]
在s73的处理之后,确认基准值存储器43f的值是否是有效的值(s74)。所谓有效的值,是压敏传感器24能够获取的0~1024为止的值。在初始化处理中,在基准值存储器43f中保存有无效的值,因此,在初始化处理后的第一次的s74的处理中,基准值存储器43f的值并非有效的值(s74:否)。在此情况下,以平均值存储器43e的值填充基准值计算环缓冲器43d(s75)。其后,以将对基准值计算环缓冲器43d的值进行平均而得的基准值保存在基准值存储器43f的方式将平均值存储器43e的值保存在基准值存储器43f(s76)。继而,在表示到下一次更新基准值存储器43f的值为止的时间的基准值更新计时器t1设定0.1秒(s77)。
[0195]
在s74的处理中,在基准值存储器43f的值是有效的值的情况下(s74:是),从基准值更新计时器t1减去0.1毫秒(s78)。在s78的处理后,确认表示基于对击打面83的打击的处理开始的打击处理标记43g是否为断开(s79)。
[0196]
在打击处理标记43g为断开的情况下(s79:是),基于打击(按压)的处理未开始,因此确认从上次平均值存储器93a的值减去当前的压敏传感器24的输出值(压敏传感器值环缓冲器43c的最新值)而得的差是否大于打击阈值n4(s80)。在s80的处理中,在与到未被打击的上次的定期处理为止的平均值存储器43e的值(上次平均值存储器93a的值)相比,此次的定期处理中的压敏传感器24的输出值比打击阈值n4大幅地下降的情况下,判断为击打面83被打击。
[0197]
在s80的处理中,在从上次平均值存储器93a的值减去压敏传感器值环缓冲器43c的最新值而得的差大于打击阈值n4的情况下(s80:是),击打面83被打击,因此,将打击处理标记43g设为接通(s81),在基准值更新计时器t1设定1秒(s82)。
[0198]
在s82的处理后,对通过初始化处理等而初始化为0秒的打击计时器t4加上0.1毫秒(s83)。打击计时器t4表示从判断为击打面83被打击起的经过时间。在s83的处理后,确认打击计时器t4是否为2毫秒(s84)。在打击计时器t4小于2毫秒的情况下(s84:否),未经过获
取压敏传感器24的峰值pm所需要的时间,因此结束定期处理。在下一个定期处理中,打击处理标记43g成为接通(s79:是),因此,在s83的处理中对打击计时器t4加上0.1毫秒,并进行等待,直至打击计时器t4成为2毫秒。
[0199]
在s84的处理中,在打击计时器t4为2毫秒的情况下(s84:是),经过获取压敏传感器24的峰值pm所需要的时间,因此,首先,为下一次击打面83被打击时准备,将打击计时器t4初始化为0秒(s85),并将打击处理标记43g设为断开(s86)。
[0200]
在s86的处理后,根据压敏传感器值环缓冲器43c的值计算2毫秒以内的压敏传感器24的峰值pm(s87)。继而,从基准值存储器43f的基准值减去峰值pm来计算打击电平(图5的(a)中的峰值特征量x2),并将所述打击电平保存在打击电平存储器93b(s88)。如此,在s88的处理(按压检测部件、按压检测步骤)中,基于压敏传感器24的输出值(峰值pm)与基准值之差来检测对击打面83的按压作为打击电平。在s88的处理后,将与打击电平存储器93b的打击电平对应的打击信息(打击指示)经由输出部95发送给pc 96(s89),而结束定期处理。
[0201]
在s80的处理中,在从上次平均值存储器93a的值减去压敏传感器值环缓冲器43c的最新值而得的差为打击阈值n4以下的情况下(s80:否),击打面83未被打击,因此转移到用于更新基准值的处理。在用于更新所述基准值的处理中,首先,确认基准值更新计时器t1是否成为0秒以下(s90)。在基准值更新计时器t1大于0秒的情况下(s90:否),更新基准值存储器43f的值后,下一次更新所述值的时机未到来,因此结束定期处理。
[0202]
在基准值更新计时器t1成为0秒以下的情况下(s90:是),成为更新基准值的时机,因此,在基准值更新计时器t1设定0.1秒(s91),并将存储在平均值存储器43e的压敏传感器24的平均输出值追加至基准值计算环缓冲器43d(s92)。继而,对存储在基准值计算环缓冲器43d的合计八个压敏传感器24的平均输出值进行平均来计算基准值,并将所述基准值保存在基准值存储器43f(s93),而结束定期处理。
[0203]
与第一实施方式同样地,如上所述那样的midi控制器(乐音生成装置)80中,弹性体84在击打面83与压敏传感器24之间被压缩,因此在击打面83与压敏传感器24之间不存在游隙,从而即使不强力地打击(按压)击打面83,也可使压敏传感器24的输出值变化。进而,基本上按照设定在基准值更新计时器t1的每0.1秒的更新时间,根据压敏传感器24的输出值来更新压敏传感器24的基准值,因此可正确地进行按压的判断或按入值的计算。其结果,可提高对击打面83的按压的灵敏度。
[0204]
在击打面83未被打击的情况下,基本上设定在基准值更新计时器t1的0.1秒的更新时间是midi控制器80的稳定时间即1秒的0.1倍。由此,可与第一实施方式同样地来适当地设定基准值。
[0205]
另外,在基准值计算环缓冲器43d中存储八个压敏传感器24的平均输出值,新的平均输出值基本上按照每0.1秒的更新时间存储在基准值计算环缓冲器43d,因此基本的采样时间成为0.8秒。对在作为midi控制器80的稳定时间的0.8倍的采样时间中获取的压敏传感器24的平均输出值进行平均来计算基准值。其结果,可与第一实施方式同样地来适当地设定基准值。
[0206]
以上,基于实施方式进行了说明,但本发明不受所述方式的任何限定,可容易地推测能够在不脱离本发明的主旨的范围内进行各种改良变形。例如,可适宜变更框体10或头
20、头21的各部形状或尺寸、原材料。也可从电子打击乐器1省略扬声器17,将电子打击乐器1连接于外部的扬声器。也可适宜变更基准值的更新时间、或获取用于更新基准值的压敏传感器的输出值的采样时间。
[0207]
在所述第一实施方式中,对模拟邦戈鼓的电子打击乐器1进行了说明,但未必限定于此。也可将本发明适用于模拟小鼓(snare drum)或大鼓(bass drum)、钹、康茄鼓等其他打击乐器的电子打击乐器。另外,也可将本发明适用于midi控制器80以外的输入装置或电子键盘乐器等进行打击或按压(按入)操作的乐音生成装置。
[0208]
在所述第一实施方式中,对弹性体26是海绵制的弹性材料的情况进行了说明,但未必限定于此。也可由橡胶或热塑性弹性体制的弹性材料形成弹性体26。另外,也可将所述第二实施方式中的弹性体84设为海绵或热塑性弹性体制。另外,也可将缓冲垫30设为橡胶或热塑性弹性体制。
[0209]
在所述第一实施方式中,对根据压敏传感器24的输出值、头振动传感器28的输出值、轮圈振动传感器32的输出值来计算击打面20a的打击位置的情况进行了说明,但未必限定于此。也可通过压敏传感器24检测利用鼓棒等对击打面20a的按压的有无或按入量,同时通过头振动传感器28检测击打面20a的振动。由此,可模拟用其他鼓棒敲击压附在击打面20a的鼓棒的鼓棒击打、在将鼓棒或手压附在击打面20a的状态下用其他鼓棒或手打击击打面20a的演奏法。在被按压的场所与打击位置相同的鼓棒打击、及被按压的场所与打击位置不同的演奏法中,轮圈振动传感器32的输出值相对于压敏传感器24或头振动传感器28的输出值之比不同,因此可区分这些演奏方的不同。
[0210]
在所述第一实施方式中,对根据各特征量x1、特征量x2、特征量x3计算打击位置(边缘度e)的情况进行了说明,但未必限定于此。例如,也可根据压敏传感器24的峰值、头振动传感器28的峰值、及轮圈振动传感器32的峰值各自的时间差来计算打击位置。另外,也可使用压敏传感器24的峰值与头振动传感器28的峰值之比、或压敏传感器24的峰值与轮圈振动传感器32的峰值之比来计算打击位置。
[0211]
在所述第一实施方式中,对头振动传感器28及轮圈振动传感器32由压电元件形成的情况进行了说明,但未必限定于此。也可由电动型或静电电容型等的接触式的检测元件、非接触式的检测元件形成头振动传感器28及轮圈振动传感器32。另外,也可将接触式的头振动传感器28直接安装在头20、头21。压敏传感器24不限于压敏电阻元件等压电电阻式的情况,也可将压敏传感器24设为静电电容式。
[0212]
在所述方式中,对施加至压敏传感器24的压力越大,即,越强力地按压或打击击打面20a,压敏传感器24的输出值越小的情况进行了说明,但未必限定于此。也可构成为施加至压敏传感器24的压力越大,压敏传感器24的输出值越大。在任何情况下,均是在所述第一实施方式中,若基准值与压敏传感器24的输出值(平均输出值)之差的绝对值大于按压阈值n2,则判断为击打面20a被按压。进而,在任何情况下,均是在各实施方式中,将压敏传感器24的峰值pm与基准值之差的绝对值设为特征量x2或打击电平。
[0213]
另外,在任何情况下,均是在所述第二实施方式中,若压敏传感器24的输出值(压敏传感器值环缓冲器43c的最新值)与到上次的定期处理为止的压敏传感器24的输出值(平均输出值)之差的绝对值大于打击阈值n4,则判断为击打面83被打击。在施加至压敏传感器24的压力越大,压敏传感器24的输出值越大的情况下,在所述第一实施方式中,基于从压敏
传感器24的输出值(平均输出值)减去基准值与按压阈值n2相加而得的值来计算按入值。再者,按入值的计算中可不使用按压阈值n2,而是基于基准值与压敏传感器24的输出值(平均输出值)之差的绝对值来计算按入值。
[0214]
在所述第一实施方式中,对根据对应的各环缓冲器43a、环缓冲器43b、环缓冲器43c的最新值获取当前的各传感器24、传感器28、传感器32的输出值的情况进行了说明,但未必限定于此。也可将存储当前的各传感器24、传感器28、传感器32的输出值的存储器与各环缓冲器43a、环缓冲器43b、环缓冲器43c分开设置。
[0215]
另外,对根据对应的各环缓冲器43a、环缓冲器43b、环缓冲器43c的值计算各传感器24、传感器28、传感器32的峰值的情况进行了说明,但未必限定于此。也可设为在击打面20a被打击后的规定时间中(例如5毫秒期间)的每次定期处理中,当前的各传感器24、传感器28、传感器32的输出值大于到上次为止保存的各传感器24、传感器28、传感器32的峰值的情况下,更新各传感器24、传感器28、传感器32的峰值。
[0216]
在所述第一实施方式中,对在从基准值减去压敏传感器24的平均输出值而得的差大于按压阈值n2的情况下,判断为存在击打面20a被按压的可能性的情况进行了说明,但未必限定于此。在压敏传感器24的平均输出值比基准值小的情况下,也可判断为存在击打面20a被按压的可能性。然而,在此情况下,优选为将比对保存在压敏传感器值环缓冲器43c的八个压敏传感器24的平均输出值进行平均而得的值稍高的值设为基准值。
[0217]
在所述第二实施方式中,对在从上次平均值存储器93a的值减去压敏传感器值环缓冲器43c的最新值而得的差大于打击阈值n4的情况下,判断为击打面83被打击(按压)的情况进行了说明,但未必限定于此。也可基于基准值与压敏传感器值环缓冲器43c的最新值之差,判断为击打面83被打击(按压)。
[0218]
在所述方式中,对按照电子打击乐器1的每个产品设计通过机械学习的监督式学习来计算加权系数w1、加权系数w2、加权系数w3、加权系数b,并在产品出厂时作为固定值存储在加权系数数据42b的情况进行了说明,但未必限定于此。也可通过使用了用户打击了击打面20a时的数据的机械学习来计算加权系数w1、加权系数w2、加权系数w3、加权系数b。在此情况下,可针对每个用户设定边缘度e应为0的击打面20a的中央部的区域、及边缘度e应为1的击打面20a的周边部的区域,因此可容易生成用户期望的乐音。
[0219]
在所述方式中,对在击打面20a的中央部的背面20b侧配置压敏传感器24,在击打面20a的周边部的背面20b侧配置头振动传感器28,在击打面20a的俯视时与头振动传感器28重叠的位置配置轮圈振动传感器32的情况进行了说明,但未必限定于此。也可适宜变更各传感器24、传感器28、传感器32的位置。根据各传感器24、传感器28、传感器32的位置,且通过机械学习来计算与各传感器24、传感器28、传感器32的输出值对应的加权系数w1、加权系数w2、加权系数w3、加权系数b,由此可提高打击位置(边缘度e)的计算精度。
[0220]
在所述第一实施方式中,对在击打面20a被按压的期间或打击处理中,在每次的定期处理中从基准值更新计时器t1不减去0.1毫秒的情况进行了说明,但未必限定于此。也可在击打面20a的按压中及打击后在基准值更新计时器t1设定1秒或10秒,因此,也可在击打面20a被按压的期间或打击处理中,在每次的定期处理中从基准值更新计时器t1减去0.1毫秒。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

