一种基于bse和gmm
‑
hmm的埋地排水管道声纹识别方法
技术领域
1.一种基于bse和gmm
‑
hmm的埋地排水管道声纹识别方法,属于管道故障检测技术领域。
背景技术:
2.随着我国进入高速城市化的进程中,城市的地下排水管道网络变得更复杂,成为了城市基础设施不可或缺的一部分。埋地排水管道在我们的生产生活中随处可见,比如生活污水和工业废水的排放以及雨季洪涝灾害中城市道路积水的排放。但随着使用年限的增长以及周围环境的变化,管道极容易发生堵塞且堵塞物的数量和位置具有不确定性,而且埋地排水管道空间分布复杂,各类管道的相互交织组成一个复杂的拓扑管网系统,管道配件三通件以及管道尾端的存在会干扰对堵塞物的识别。因此,对堵塞物准确识别以及能有效区分三通件和尾端具有重要的意义,不仅能够节约水资源,而且能提升国民生活幸福感。在目前的实际工程应用中,管道堵塞的研究方法主要有振动分析、放射性同位素技术、脉冲回波分析、频率响应图、随机连续线性估计量等。这些方法不仅在成本上花费高昂而且部分方法还需要对土地进行不同程度的开挖影响管道正常运行,耗时耗力但效果不一定理想。基于声学主动检测技术是一种无损检测方法,它具有易操作、不依赖于操作人员的主观判断的特点。通过对采集得到的声压信号进行有效预处理,特征提取以及模式识别就能识别管道堵塞物和管道配件。
技术实现要素:
3.为了解决实际工程应用中,埋地排水管道中的堵塞物,管道配件三通件以及管道尾端的数量和位置具有不确定性和时变性而导致训练样本所包含的工况类型不足而带来的新工况识别率低下的问题,本发明提供了一种基于bse和gmm
‑
hmm的埋地排水管道声纹识别方法。
4.本发明的技术方案是:一种基于bse和gmm
‑
hmm的埋地排水管道声纹识别方法,所述的方法具体步骤如下:
5.step1、通过数据采集装置对简单工况和复杂工况下运行的埋地排水管道进行检测,获得不同工况下的低频声压信号数据;
6.其中,数据采集装置包括带有pc机、声卡、功率放大器,带有扬声器的伸缩杆、带有水听器的固伸缩杆、滤波器;其具体实现过程为实验人员通过计算机控制声卡产生信号,经过功率放大器放大后通过带有扬声器的伸缩杆将信号释放到管道中,然后通过带有水听器的伸缩杆接收反射回来的信号,经滤波器去除不需要的背景和机械噪声,最后上传至计算机存储能获取信噪比较高的低频声压信号;
7.其中,简单工况为含管道内只含单个堵塞物或者单个三通件以及健康空管状态的埋地排水管道,复杂工况为管道内含两个及两个以上堵塞物或同时存在单个三通件的埋地排水管道;
8.step2、分别对step1中获得的不同工况下的低频声压信号数据进行小波阈值降噪,获得降噪后的低频声压信号数据;
9.step3、采用子带谱熵作为判别参数,分别对step2中获得降噪后的低频声压信号进行端点检测与信号分割;
10.其中,端点检测和信号分割过程具体为:首先对降噪后的信号进行加窗、分帧和傅里叶变换,然后计算每帧信号的子带谱熵,并利用子带谱熵作为判别参数进行端点检测。最后利用端点检测得到堵塞物,三通件和尾端声压信号起止点的具体帧数进行分割,得到堵塞物、三通件和尾端的个体声压信号;
11.step4、分别对step3中分割得到的低频声压信号提取精细复合多尺度散布熵,构建能表征堵塞物、三通件和管道尾端的特征向量集;
12.其中,特征向量集构建的具体过程为:将简单工况下分割得到的堵塞物、三通件和尾端的个体声压信号提取精细复合多尺度散布熵作为特征向量并构建特征向量集,用于step5中模型的训练,将复杂工况下分割得到的堵塞物、三通件和尾端的个体声压信号提取精细复合多尺度散布熵作为特征向量并构建特征向量集,用于step6中模型的测试;
13.step5、将step4中简单工况下构建的特征向量集,用于声纹识别模型的训练,得到gmm
‑
hmm模型;
14.其中,得到的gmm
‑
hmm声纹识别模型包括含堵塞的管道声纹识别模型λ1、含三通件的管道声纹识别模型λ2、含尾端的管道声纹识别模型λ3,上述模型利用简单工况下含单个堵塞物、含单个三通件以及含单个尾端的低频声压信号经步骤step2
‑
step5训练得到;
15.step6、将step4中复杂工况下构建的特征向量集输入到step5中的模型,得到每个模型给出的对数似然概率值,根据对数似然概率值的大小判定其所属的类别,从而可以区分堵塞物、管道配件三通件和管道尾端。
16.本发明的有益效果是:
17.1检测方法是一种无损检测,它既不依赖于检测人员的主观判断,也没有对管道有任何创伤,易操作性强。
18.2利用声学检测方法,可以让实验人员不下管道的同时也能获得大量的关于管道运行状态和内部结构的声学信息。
19.3利用端点检测和信号方法,可以定位到堵塞物、管道配件三通件和管道尾端的个体声压信号的起止点并进行分割,能更聚焦目标对象个体。
20.4gmm
‑
hmm声纹识别模型识别准确率高,同时还具有一定的鲁棒性。
附图说明
21.图1是本发明的数据采集装置简图;
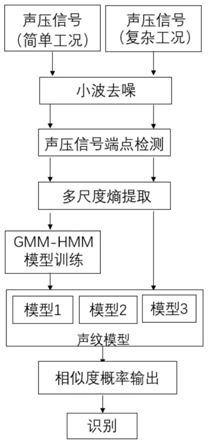
22.图2是本发明的方法流程图;
23.图3为高度为55mm堵塞物原始时域波形和降噪后的时域波形;
24.图4为高度为55mm堵塞物端点检测结果图;
25.图5为高度为55mm堵塞物信号分割结果图;
26.图6为高度为55mm和40mm的堵塞物、管道配件三通件、管道尾端数据在gmm
‑
hmm声纹识别模型的对数似然概率输出值;
27.图7为不同模型的识别准确率对比图;
具体实施方式
28.下面结合附图和具体实施方式,对本发明作进一步说明。
29.实施例1:基于bse和gmm
‑
hmm的埋地排水管道声纹识别方法,其声压信号数据采集装置如附图1所示。实施过程为:实验人员通过操作装有winls软件的计算机控制声卡产生频率为100
‑
6000hz,长度为10s的正弦扫频声波信号,声卡型号为华硕xonar essence stx ii 7.1,选用型号为drv603pwr的功率放大器进行功率放大,然后通过伸缩杆,将固定在伸缩杆上的扬声器伸入管道中发射声波信号,扬声器选用型号为evum30水下扬声器,固定在另一根伸缩杆上的型号为rhsm
‑
10标准水听器接收来自管道中反射回来的声波信号,经型号为kemo vbf 40滤波器进行滤波,并以44100hz采样率数字化上传至计算机存储能获取信噪比较高的信号,最后使用计算机上winmls软件对信号去卷积获得声压信号的脉冲响应。
30.按照方法流程图(如图2)来对本实施例进行说明。
31.信号的获取:为了获取简单工况和复杂工况两种不同类型的管道声压信号以及证明本发明所提方法的有效性,实验室搭建了如附图一所示的实验平台。得到每种简单工况下的样本数量为40组,每种复杂工况下的样本数量为20组。其中,简单工况为含管道内只含单个堵塞物或者单个三通件以及健康空管状态的埋地排水管道,复杂工况为管道内含两个及两个以上堵塞物或同时存在单个三通件的埋地排水管道。
32.信号去噪:利用小波降噪对得到的声压信号进行降噪,其中,小波降噪的分解层数为3,小波基函数为db9,选取stein无偏风险估计原理方法确定阈值,利用低频系数和处理后的高频系数重构信号得到降噪后的信号。对高度为55mm堵塞物进行小波降噪,原始时域波形和降噪后的时域波形如附图3所示。
33.信号的端点检测与分割:首先对降噪后的信号进行加窗、分帧和傅里叶变换,其次利用子带谱熵作为判别参数对声压信号进行端点检测,能有效定位到堵塞物、三通件和尾端声压信号的起止点的具体帧数,并进行分割得到堵塞物、三通件以及尾端的个体声压信号。对高度为55mm堵塞物进行端点检测如附图4所示和信号分割得到含55mm堵塞物和尾端的个体声压信号如附图5所示。
34.声纹识别模型的建立:利用简单工况下四种不同类型的声压信号分割得到的40&55mm堵塞物、三通件和尾端建立gmm
‑
hmm声纹识别模型λ=(λ1,λ2,λ3),其中堵塞物声纹识别模型λ1,三通件声纹识别模型λ2,尾端声纹识别模型λ3。该模型隐状态数目为3,随机取值或者均匀取值的方式对初始概率π和状态转移矩阵a赋值,高斯混合模型数取1,协方差类型为对角协方差矩阵,采用em迭代算法对参数进行估计,迭代次数设置为100,迭代停止阈值为1e
‑3。
35.模型的测试:测试数据利用复杂工况下2种不同类型的声压信号分割得到的40&50mm堵塞物、三通件和尾端构建测试数据样本集,输入到由简单工况训练得到的声纹识别模型。每个模型都会给出一个对数似然概率值lnp(o|λ),对数似然概率值表式输入模型的观测序列与该模型的相似程度,相似程度越高该值越大。如附图6所示,声纹识别模型给出了每种测试样本的似然概率值,实验结果表明,基于bse和gmm
‑
hmm的埋地排水管道声纹识别方法对堵塞物、三通件和尾端识别准确率较高,可靠性较强,鲁棒性较好。
36.实施例2:为了验证本发明提出的方法的鲁棒性,我们以更复杂的工况验证所提出的方法,其具体为管道内存在2个三通件且位置任意,同时使用三个高度不同的石质挡板来模拟堵塞物且位置任意,高度分别为20mm、40mm和55mm。数据采集的方式如实施例1。得到的声压信号首先进行小波阈值去噪,分解层数为3,小波基函数为db9,选取stein无偏风险估计原理方法确定阈值,利用低频系数和处理后的高频系数重构信号得到降噪后的信号。然后对降噪后的信号利用子带谱熵作为判别参数进行端点检测和信号分割,得到20mm堵塞物个体声压信号、40mm堵塞物个体声压信号、55mm堵塞物个体声压信号和三通件个体声压信号。然后利用更复杂工况下分割得到的个体声压信号测试简单工况下建立的声纹模型,得到识别准确率。若声纹模型输出准确率越高,则该模型鲁棒性越好。
37.实施例3:为了验证本发明提出方法的有效性和可靠性,其具体为堵塞物的数量、种类、位置和数据采集的方式如实施例1,但是管道内的水位不同。本实施例将验证管道内存在0mm、10mm、20mm三种不同水位对本发明提出方法的有效性和可靠性的影响。首先利用无水状态下采集得到的声压信号进行小波阈值降噪,然后对降噪后的信号利用子带谱熵作为判别参数进行端点检测和信号分割,得到40mm堵塞物个体声压信号、55mm堵塞物个体声压信号、三通件个体声压信号和尾端个体声压信号。然后利用有水状态下采集得到的声压信号进行降噪、端点检测与分割得到个体声压信号然后提取特征向量测试由无水状态下声压信号训练完成的声纹模型得到识别准确率,若声纹模型输出准确率越高,则该模型可靠性和有效性越好。
38.以上结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

