技术特征:
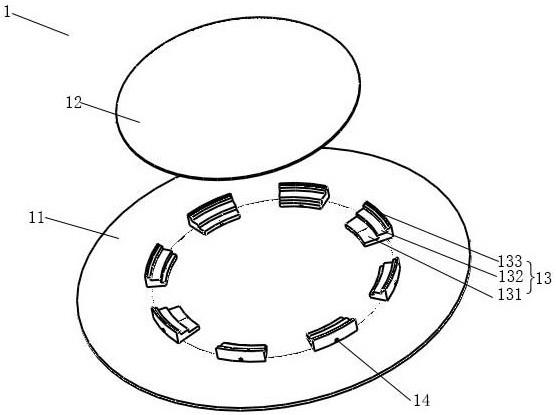
1.一种晶圆示教夹具,包括:晶圆盒,具有多个插槽使多个晶圆按照预设的间隔以堆叠方式层叠,在所述插槽的两侧中的至少一侧形成有开口部,通过所述开口部允许装载或者卸载所述晶圆;机械臂,用于将所述晶圆装载在所述晶圆盒的插槽或者从所述晶圆盒的插槽卸载;传感器部,可分离地配置在所述晶圆盒的插槽中的下端部的插槽,用于测量位于上部的所述晶圆及所述机械臂的高度或者位置;及控制部,基于所述传感器部的测量值计算所述晶圆的高度等级及所述机械臂的水平度等级,并以数字方式提供计算出的数据。2.根据权利要求1所述的晶圆示教夹具,其特征在于,所述传感器部包括:传感器底座,形成为板状,并插入于所述晶圆盒的插槽中;晶圆感知传感器,多个所述晶圆感知传感器沿着所述传感器底座的周围设置,感测与位于所述传感器底座的上部的所述晶圆之间的距离并提供给所述控制部;及机械臂感知传感器,设置在所述传感器底座,与所述晶圆感知传感器一同感测与所述晶圆之间的距离并提供给所述水平度计算部,而且,配置在与所述晶圆盒的开口部相对应的位置,以便在装载及卸载所述晶圆时感测与所述机械臂之间的距离并提供给所述控制部。3.根据权利要求2所述的晶圆示教夹具,其特征在于,所述机械臂包括:叉部,形成为叉形状,以防止在通过机器人的操作而投入于所述晶圆下部时被所述晶圆感知传感器及所述机械臂感知传感器感测,并且在前端部形成有挡块,以便在通过所述机器人抬高所述晶圆的状态下牵引所述晶圆;及传感器感测部,一体形成在所述叉部的后端,构成与所述机器人的连接部位,并且形成为板状,以便被所述机械臂感知传感器感测。4.根据权利要求2所述的晶圆示教夹具,其特征在于,所述控制部包括:零点计算部,基于所述晶圆感知传感器及所述机械臂感知传感器的感测信号,测量与所述晶圆之间的距离,进而计算所述晶圆的高度等级并计算出零点;机械臂位置感测部,通过所述机械臂感知传感器的感测信号,测量与向所述晶圆的下部移动的所述机械臂之间的距离,进而计算出所述机械臂的高度等级;及水平度计算部,当所述机械臂为了卸载所述晶圆而抬升所述晶圆时,推测及感测所述晶圆的上升位置,并基于推测数据及感测数据计算出所述机械臂的水平度。5.根据权利要求4所述的晶圆示教夹具,其特征在于,所述水平度计算部包括:位置推测部,基于所述零点计算部及所述机械臂位置感测部的数据,推测并计算所述晶圆的上升位置;位置测量部,当所述机械臂抬升所述晶圆时,通过所述晶圆感知传感器及所述机械臂感知传感器测量所述晶圆及所述机械臂的上升位置;及比较部,比较所述位置推测部和所述位置测量部的数据,从而计算出所述机械臂的水
平度。6.根据权利要求4所述的晶圆示教夹具,其特征在于,所述控制部还包括补正部,所述补正部基于所述水平度计算部的数据对所述机械臂的水平度进行补正。
技术总结
本发明涉及一种可测量晶圆传送用机械臂和晶圆的水平状态的晶圆示教夹具,其包括:晶圆盒,具有多个插槽使多个晶圆按照预设的间隔以堆叠方式层叠,在所述插槽的两侧中的至少一侧形成有开口部,通过所述开口部允许装载或者卸载所述晶圆;机械臂,用于将所述晶圆装载在所述晶圆盒的插槽或者从所述晶圆盒的插槽卸载;传感器部,可分离地配置在所述晶圆盒的插槽中的下端部的插槽,用于测量位于上部的所述晶圆及所述机械臂的高度或者位置;及控制部,基于所述传感器部的测量值计算所述晶圆的高度等级及所述机械臂的水平度等级,并以数字方式提供计算出的数据。式提供计算出的数据。式提供计算出的数据。
技术研发人员:吴世德
受保护的技术使用者:吴世德
技术研发日:2019.09.11
技术公布日:2021/10/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。