1.本发明涉及晶圆示教夹具,更详细地说,涉及一种可测量晶圆传送用机械臂和晶圆的水平状态的晶圆示教夹具。
背景技术:
2.通常,在半导体工艺中,光刻工艺是将抗蚀剂溶液涂敷于晶圆基板上之后利用光掩模进行曝光和显影来形成所需的抗蚀剂图案。
3.处理这种光刻工艺的半导体制造设备是多个晶圆传送机器人和多个处理单元(或者,工艺腔室)配置成一列及/或者层叠结构,利用晶圆传送机器人在涂敷抗蚀剂溶液及处理曝光和显影的各个处理单元装载及卸载晶圆。
4.从而,为了将晶圆准确供应于各个处理单元,半导体制造设备有必要设定晶圆传送机器人的位置。
5.具体地说,晶圆是在被传送用机械臂(arm)支撑的状态下传送,此时为了准确地传送晶圆,机械臂的设备状态,即对于传送行程及操作面的垂直状态起到非常重要的作用。
6.在此,机械臂的安装高度与臂的工作距离相关,如果安装高度与初始设定高度不同,则会对晶圆施加冲击。
7.即,实施上下传送预定距离的机械臂的传送行程(工作面与臂之间的高度)大于设定值的情况下,在支撑晶圆的状态下机械臂朝向操作面传送的过程中晶圆接触于操作面,进而在装载晶圆时在晶圆表面可出现划痕(scratch)或者损坏。
8.另外,在卸载晶圆时,机械臂以保持推进力的状态接触于安装在操作面的晶圆,因此可出现上述的晶圆受损的问题。
9.从而,正在要求能够克服如上所述的现有技术的问题的新技术。
10.本发明所属技术领域的现有技术文献有韩国授权专利公报第10
‑
0931857号等。
技术实现要素:
11.技术问题
12.本发明是为了改善如上所述的现有技术的问题而提出的,目的在于提供一种晶圆示教夹具,可测量晶圆传送用机械臂和晶圆的水平状态,并且测量上下相互面对的晶圆之间的间隙,进而可事先避免机械臂进行装载及卸载工作时与晶圆碰撞的现象。
13.具体地说,本发明的目的在于提供如下的晶圆示教夹具:通过机械臂的位置推测用于装载/卸载晶圆的上升位置,并且与晶圆的实际上升位置相比较,从而能够测量并修改机械臂的水平度。
14.技术方案
15.为了达到上述的目的,本发明一实施例的晶圆示教夹具可包括:晶圆盒,具有多个插槽使多个晶圆按照预设的间隔以堆叠方式层叠,在所述插槽的两侧中的至少一侧形成有开口部,通过所述开口部允许装载或者卸载所述晶圆;机械臂,用于将所述晶圆装载在所述
晶圆盒的插槽或者从所述晶圆盒的插槽卸载;传感器部,可分离地配置在所述晶圆盒的插槽中的下端部的插槽,用于测量位于上部的所述晶圆及所述机械臂的高度或者位置;及控制部,基于所述传感器部的测量值计算所述晶圆的高度等级及所述机械臂的水平度等级,并以数字方式提供计算出的数据。
16.另外,所述传感器部可包括:传感器底座,形成为板状,并插入于所述晶圆盒的插槽;晶圆感知传感器,多个所述晶圆感知传感器沿着所述传感器底座的周围设置,感测与位于所述传感器底座的上部的所述晶圆之间的距离并提供给所述控制部;及机械臂感知传感器,设置在所述传感器底座,与所述晶圆感知传感器一同感测与所述晶圆之间的距离并提供给所述水平度计算部,而且,配置在与所述晶圆盒的开口部相对应的位置,以在装载及卸载所述晶圆时感测与所述机械臂之间的距离并提供给所述控制部。
17.另外,所述机械臂可包括:叉部,形成为叉形状,以防止在通过机器人的操作而投入于所述晶圆下部时被所述晶圆感知传感器及所述机械臂感知传感器感测,并且在前端部形成有挡块,以便在通过所述机器人抬高所述晶圆的状态下牵引所述晶圆;及传感器感测部,一体形成在所述叉部的后端,构成与所述机器人的连接部位,并且形成为板状,以便被所述机械臂感知传感器感测。
18.另外,所述控制部可包括:零点计算部,基于所述晶圆感知传感器及所述机械臂感知传感器的感测信号,测量与所述晶圆之间的距离,进而计算所述晶圆的高度等级并计算出零点;机械臂位置感测部,通过所述机械臂感知传感器的感测信号测量与向所述晶圆的下部移动的所述机械臂之间的距离,进而计算所述机械臂的高度等级;及水平度计算部,当所述机械臂为了卸载所述晶圆而抬升所述晶圆时,推测及感测所述晶圆的上升位置,并基于推测数据及感测数据计算出所述机械臂的水平度。
19.另外,所述水平度计算部可包括:位置推测部,基于所述零点计算部及所述机械臂位置感测部的数据,推测并计算所述晶圆的上升位置;位置测量部,在所述机械臂抬升所述晶圆的情况下,通过所述晶圆感知传感器及所述机械臂感知传感器测量所述晶圆及所述机械臂的上升位置;及比较部,比较所述位置推测部和所述位置测量部的数据,从而计算出所述机械臂的水平度。
20.另外,所述控制部还可包括补正部,所述补正部基于所述水平度计算部的数据补正所述机械臂的水平度。
21.发明效果
22.本发明的一实施例的晶圆示教夹具的效果如下:可测量晶圆传送用机械臂和晶圆的水平状态,并且测量上下相互面对的晶圆之间的间隙,以便事先避免在装载/卸载部进行装载/卸载工作时与晶圆碰撞的现象。
23.尤其是,本发明的晶圆示教夹具为在传感器部配置在晶圆盒的状态下计算机械臂的水平度,因此可简便地适用于现有的设备。
24.具体地说,本发明的晶圆示教夹具通过机械臂的位置推测用于装载/卸载晶圆的上升位置,并且与晶圆的实际上升位置相比较来测量机械臂的水平度,因此能够更加准确地计算机械臂的水平度。
25.从公开的实施例可得出的效果不限于在以上提及的效果,对于未提及的其他效果在公开的实施例所属技术领域中具有常规知识的人可从以下的记载中明确理解。
附图说明
26.图1是示出本发明的一实施例的晶圆示教夹具的立体图。
27.图2是示出本发明的一实施例的晶圆示教夹具的使用状态的立体图。
28.图3是示出本发明的一实施例的晶圆示教夹具的主视图。
29.图4是示出本发明的控制部的框图。
30.附图标记:
31.10:晶圆示教夹具
ꢀꢀꢀꢀꢀꢀꢀ
100:晶圆盒
32.110:插槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200:机械臂
33.210:叉部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211:挡块
34.220:传感器感测部
ꢀꢀꢀꢀꢀꢀ
300:传感器部
35.310:传感器底座
ꢀꢀꢀꢀꢀꢀꢀꢀ
320:晶圆感知传感器
36.330:机械臂感知传感器
ꢀꢀ
400:控制部
37.410:零点计算部
ꢀꢀꢀꢀꢀꢀꢀꢀ
420:机械臂位置感测部
38.430:水平度计算部
ꢀꢀꢀꢀꢀꢀ
431:位置推测部
39.432:位置测量部
ꢀꢀꢀꢀꢀꢀꢀꢀ
433:比较部
40.440:补正部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1:晶圆
具体实施方式
41.以下,参照附图将更加详细说明本发明的实施例。在本发明的说明中,省略相关公知的通用功能或者结构的详细说明。
42.本发明的概念及实施例可施加各种改变并且可具有各种形状,因此在附图示例特定实施例并在本书明书或者申请进行详细说明。然而,这并不是要将根据本发明概念的实施例限定于特定公开的形状,而是应该理解为包括本发明的思想及技术所涵盖的所有改变、同等物至代替物。
43.在说明某一构件“连接”或者“接触”于其他构件时,应该理解为可以是直接连接或者接触,但是中间也可存在其他构件。相反地,在某一构件“直接连接”或者“直接接触”于其他构件时,应该理解为中间不存在其他构件。对于说明构件之间的关系的其他表述,即“介于~之间”、“直接介于~之间”或者“与~相邻”、“与~直接相邻”等也以同样的方式解释。
44.在本说明书中使用的用语只是为了说明特定的实施例而使用的,并没有要限定本发明的意图。对于单数的表述,除非有明确说明,否则包含复数的表述。在本说明书中,对于“包括”或者“具有”等的用语应该理解为是要指定设置的特征、数字、步骤、动作、构件、部分零部件或者这些组合的存在,并不提前排除一个或者一个以上的其他特征或者数字、步骤、动作、构件、部分零部件或者这些组合的存在或者增加的可能性。
45.图1是示出本发明一实施例的晶圆示教夹具的立体图;图2是示出本发明一实施例的晶圆示教夹具的使用状态的立体图;图3是示出本发明一实施例的晶圆示教夹具的主视图。另外,图4是示出本发明的控制部的框图。
46.本发明的一实施例的晶圆示教装置10是在半导体制造工艺中传送晶圆1时测量并修改传送晶圆1的机械臂200的水平度进而可防止机械臂200导致晶圆1受损的装置。
47.具体地说,如图1所示,一实施例的晶圆示教装置10可包括:晶圆盒100、机械臂
200、传感器部300及控制部400。
48.所述晶圆盒100是使多个晶圆1按照预设的间隔以堆叠方式层叠的构件。
49.具体地说,晶圆盒100形成有多个插槽110,所述多个插槽110插入晶圆1并且按照预定间隔以垂直方向形成,进而在多个晶圆1装载于各个插槽110的同时可按照预定间隔层叠多个晶圆1。
50.这种晶圆盒100为在插槽110的一侧形成有开口部,进而晶圆1通过开口部可装载于插槽110或者可从插槽110卸载。
51.即,晶圆盒100为被后述的机械臂200传送的晶圆1通过开口部插入于插槽110的同时可层叠多个晶圆1。
52.所述机械臂200是用于将晶圆1传送并装载于晶圆盒100的插槽110或者从晶圆盒100卸载晶圆1的构件。
53.这种机械臂200连接于未示出的机器人,通过机器人的操作进行水平移动及垂直移动的同时传送晶圆1。
54.具体地说,如图1及图2所示,机械臂200可包括叉部210及传感器感测部220。
55.所述叉部210是通过未示出的机器人的操作向晶圆1下部移动来抬升晶圆1的同时进行牵引的构件。
56.这种叉部210在支撑晶圆1底面的状态下通过机器人移动的同时将晶圆1插入于插槽110之后进行下降,进而可将晶圆1装载于插槽110,并且移动于晶圆1之间,在抬升晶圆1底面的状态下通过机器人移动的同时可从插槽110卸载晶圆1。
57.在此,叉部210可形成为分割成多个的叉形状,以在向晶圆1下部移动的情况下可防止被构成后述的传感器部300的晶圆感知传感器320及机械臂感知传感器330感测。
58.即,如图1所示,叉部210通过分割的空间与机械臂感知传感器330相互面对的同时进入开口部,进而在未被机械臂感知传感器330感测的情况下可向晶圆1下部移动。
59.如图2所示,这种叉部210为在前端部形成有挡块211,在抬升晶圆1的状态下挡块211卡在晶圆1,因此可牵引晶圆1。
60.所述传感器感测部220是被后述的机械臂感知传感器330感测的构件。
61.具体地说,传感器感测部220与叉部210的后端部形成一体,构成与未示出的机器人的连接部位,并且形成为板状,进而可被后述的机械臂感知传感器330感测。
62.即,机械臂200在通过晶圆盒100的开口部进入的情况下,因为叉部210而未被机械臂感知传感器330感测,在完成进入之后传感器感测部220与机械臂感知传感器330相互面对,进而可被机械臂感知传感器330感测。
63.所述传感器部300是用于测量配置在晶圆盒100的晶圆1及机械臂200的位置或者高度的构件。
64.如图2及图3所示,传感器部300在晶圆盒100的插槽110中可分离地配置在下端部的插槽110,进而感测位于上部的晶圆1或者机械臂200。
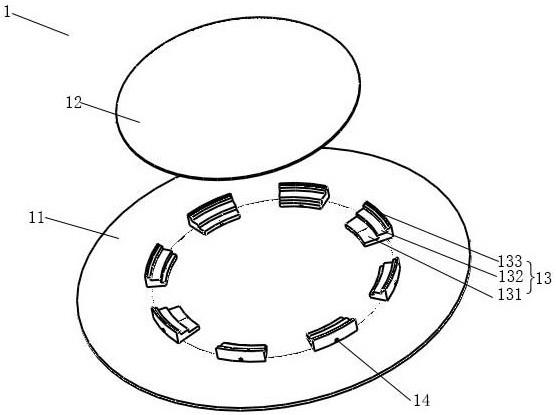
65.具体地说,如图1所示,传感器部300可包括:传感器底座310、晶圆感知传感器320及机械臂感知传感器330。
66.所述传感器底座310形成为板状,可插入于晶圆盒100的插槽110,进而插入配置在插槽110中的下端插槽110。
67.所述晶圆感知传感器320可感测与位于传感器底座310上部的晶圆1的距离并提供给后述的控制部400。
68.具体地说,晶圆感知传感器320构成为多个,且沿着传感器底座310的周围配置。
69.这种晶圆感知传感器320向上部照射红外线、超声波或者激光的同时感测晶圆1,并且感测与晶圆1的距离,进而提供晶圆1的高度等级。
70.所述机械臂感知传感器330为设置在传感器底座310并且与晶圆感知传感器320一同感测与晶圆1的距离,或者在通过机械臂200装载及卸载晶圆1时感测与机械臂200的距离来提供给后述的控制部400的构件。
71.这种机械臂感知传感器330配置在与晶圆盒100的开口部相对应的位置,进而感测与上述的机械臂200的传感器感测部220的距离,可将机械臂200的高度等级提供给控制部400。
72.所述控制部400是基于上述传感器部300的测量值计算晶圆1的高度等级及机械臂200的水平度等级并将计算出的数据以数字方式提供的构件。
73.这种控制部400可搭载于设置在传感器底座310的微处理器,并且搭载于单独的服务器可接收传感器部300的数据。
74.具体地说,如图4所示,控制部400可包括:零点计算部410、机械臂位置感测部420及水平度计算部430。
75.所述零点计算部410基于上述晶圆感知传感器320及机械臂感知传感器330的感测信号,计算配置在传感器底座310上部的插槽110的晶圆1的高度等级,进而设定零点。
76.所述机械臂位置感测部420通过机械臂感知传感器330的感测信号测量与向所述晶圆1下部移动的机械臂200的距离,进而计算机械臂200的高度等级。
77.此时,机械臂位置感测部420可通过由机械臂200的机械臂感知传感器330感测的传感器感测部220的位置计算出机械臂200的高度等级。
78.所述水平度计算部430是用于计算机械臂200的水平度的构件。
79.具体地说,水平度计算部430在机械臂200抬升晶圆以卸载晶圆1的情况下推测及感测晶圆1的上升位置,并且基于推测数据及感测数据计算机械臂200的水平度。
80.即,晶圆1在安装在插槽110的状态下保持水平,但是在通过未保持水平的机械臂200上升的情况下,可能被机械臂200破坏水平度。
81.水平度计算部430可通过已设定零点的晶圆1的上升位置计算机械臂200的水平度。
82.具体地说,如图4所示,水平度计算部430可包括:位置推测部431、位置测量部432及比较部433。
83.所述位置推测部431基于由上述零点计算部410计算出的晶圆1的高度等级和由上述机械臂位置感测部420计算出的机械臂200的高度等级,推测并计算机械臂200抬升晶圆1的上升位置。
84.具体地说,位置推测部431在已设定零点的晶圆1的高度等级上计算机械臂200的上升距离,进而可推测并计算出晶圆1的上升位置。
85.所述位置测量部432在机械臂200抬升晶圆1时,通过晶圆感知传感器320及机械臂感知传感器330测量晶圆1及机械臂200的实际上升位置。
86.所述比较部433比较由上述的位置推测部431和位置测量部432分别计算出的数据,以计算机械臂200的水平度。
87.即,比较部433比较由位置推测部431推测的晶圆1的上升位置和由位置测量部432实际测量的晶圆1的上升位置,进而计算机械臂200的水平度。
88.例如,在机械臂200具有均匀的水平度的情况下,可比较出由位置推测部431推测的晶圆1的上升位置和由位置测量部432实际测量的晶圆1的上升位置相同;在机械臂200具有不均匀的水平度的情况下,可比较出由位置推测部431推测的晶圆1的上升位置和由位置测量部432实际测量的晶圆1的上升位置不同。
89.所述控制部400将由水平度计算部430计算出的数据作为数字数据提供于管理人员的显示器,基于计算出的数据通过补正部440补正机械臂200的水平度。
90.如上所述,本发明的晶圆示教装置10在传感器部300配置在晶圆盒100的状态下可计算机械臂200的水平度,因此可简便地适用于现有的设备,尤其是,通过机械臂200的位置推测用于装载/卸载晶圆1的上升位置,并且与晶圆1的实际上升位置相比较测量机械臂200的水平度,因此更加准确计算并修改机械臂200的水平度,进而可防止机械臂200导致晶圆1受损。
91.上述的实施例是用于示例的,具有上述的实施例所属技术领域的常规知识的人员应该理解为在不改变上述实施例所具备的技术思想或者必要特征的情况下可容易变形为其他具体形状。因此,只应理解为上述的实施例在所有方面都是示例性的,而非限定性的。例如,以单数形式说明的各个构件可分散实施,同样地分散说明的构件也能够以结合的形式实施。
92.对于通过本说明书请求保护的范围应该由权利要求书的范围体现,而非上述的详细说明,并且包括从权利要求书的含义、范围及同等概念导出的所有改变或者变形的形状。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。