1.本发明涉及一种马达。
背景技术:
2.通常,在马达中,使用用于检测转子的旋转位置的磁传感器和位置检测用磁铁(也称为传感器磁铁)(例如,参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2003
‑
52159号公报
技术实现要素:
6.发明所要解决的课题
7.在将传感器磁铁与交替极型转子一起使用的情况下,在n极成分与s极成分之间不平衡的漏磁通从交替极型转子产生。因此,有时由磁传感器检测的检测结果的误差变大。其结果,存在马达控制的精度降低、马达效率降低这样的问题。
8.本发明的目的在于防止包括交替极型转子在内的马达中的马达效率的降低。
9.用于解决课题的方案
10.本发明的一个方式的马达具备:
11.交替极型转子,具有转子芯、固定于所述转子芯的永磁铁、以及固定于所述转子芯的传感器磁铁,所述交替极型转子具有旋转轴;
12.定子,配置于所述交替极型转子的外侧;以及
13.磁传感器,检测来自所述传感器磁铁的磁通,
14.当将从所述旋转轴到所述磁传感器的最短距离设为rh1,将从所述旋转轴到所述永磁铁的最短距离设为rm1时,
15.所述马达满足rh1>rm1。
16.本发明的其他方式的风扇具备:
17.叶片;以及
18.马达,驱动所述叶片,
19.所述马达具有:
20.交替极型转子,具有转子芯、固定于所述转子芯的永磁铁、以及固定于所述转子芯的传感器磁铁,所述交替极型转子具有旋转轴;
21.定子,配置于所述交替极型转子的外侧;以及
22.磁传感器,检测来自所述传感器磁铁的磁通,
23.当将从所述旋转轴到所述磁传感器的最短距离设为rh1,将从所述旋转轴到所述永磁铁的最短距离设为rm1时,
24.所述马达满足rh1>rm1。
25.本发明的其他方式的空气调节机具备:
26.室内机;以及
27.室外机,与所述室内机连接,
28.所述室内机及所述室外机中的至少1个具有马达,
29.所述马达具有:
30.交替极型转子,具有转子芯、固定于所述转子芯的永磁铁、以及固定于所述转子芯的传感器磁铁,所述交替极型转子具有旋转轴;
31.定子,配置于所述交替极型转子的外侧;以及
32.磁传感器,检测来自所述传感器磁铁的磁通,
33.当将从所述旋转轴到所述磁传感器的最短距离设为rh1,将从所述旋转轴到所述永磁铁的最短距离设为rm1时,
34.所述马达满足rh1>rm1。
35.发明效果
36.根据本发明,能够防止包括交替极型转子在内的马达中的马达效率的降低。
附图说明
37.图1是概略地表示本发明的实施方式1的马达的构造的局部剖视图。
38.图2是概略地表示主磁铁的构造的剖视图。
39.图3是表示转子与磁传感器之间的位置关系的图。
40.图4是表示转子与磁传感器之间的位置关系的图。
41.图5是表示在马达中由主磁铁产生的磁传感器的检测误差消失的情况下的、从轴线到磁传感器的最短距离与轴向上的从主磁铁到磁传感器的最短距离的关系的图表。
42.图6是表示马达内的磁传感器的检测误差与从轴线到磁传感器的最短距离的关系的图表。
43.图7是表示由马达内的磁传感器检测出的检测值与磁传感器的位置的关系的图表。
44.图8是概略地表示传感器磁铁的构造的俯视图。
45.图9是表示示出传感器磁铁的n极的磁通(具体而言,从n极朝向磁传感器的磁通)的磁通密度的大小的图表。
46.图10是表示在马达中关于来自传感器磁铁的磁通的磁通密度的变化的一例的图表。
47.图11是表示在马达中关于来自传感器磁铁的磁通的磁通密度的变化、关于来自主磁铁的磁通的磁通密度的变化、以及关于进入磁传感器的磁通的磁通密度的变化的例子的图表。
48.图12是表示在马达中关于来自传感器磁铁的磁通的磁通密度的变化、关于来自主磁铁的磁通的磁通密度的变化、以及关于进入磁传感器的磁通的磁通密度的变化的例子的图表。
49.图13是概略地表示本发明的实施方式2的风扇的构造的图。
50.图14是概略地表示本发明的实施方式3的空气调节机的结构的图。
具体实施方式
51.实施方式1
52.对本发明的实施方式1的马达1进行说明。
53.在各图所示的xyz正交坐标系中,z轴方向(z轴)表示与马达1的轴线ax平行的方向,x轴方向(x轴)表示与z轴方向(z轴)正交的方向,y轴方向(y轴)表示与z轴方向以及x轴方向双方正交的方向。轴线ax是转子2的旋转中心、即转子2的旋转轴。与轴线ax平行的方向也称为“转子2的轴向”或简称为“轴向”。径向是转子2的半径方向,是与轴线ax正交的方向。xy平面是与轴向正交的平面。
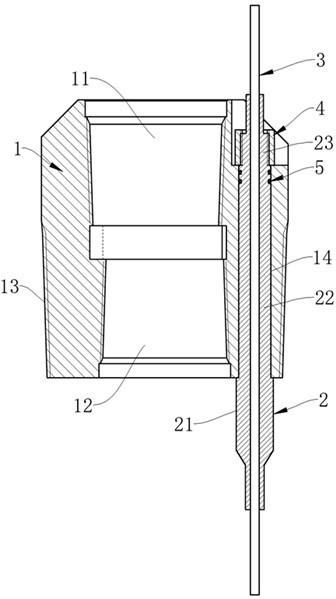
54.图1是概略地表示实施方式1的马达1的构造的局部剖视图。
55.马达1具有转子2、定子3、电路基板4、检测转子2的旋转位置的磁传感器5以及模制树脂6。马达1例如是永磁铁埋入型马达(ipm马达)等永磁铁同步马达。
56.转子2具有主磁铁20、轴23以及传感器磁铁24。转子2以能够旋转的方式配置于定子3的内侧。主磁铁20具有转子芯21和至少1个永磁铁22。转子2的旋转轴与轴线ax一致。转子2例如是永磁铁埋入型。在本实施方式中,转子2是交替极型转子。
57.转子芯21固定于轴23。轴23由轴承7a和轴承7b能够旋转地保持。当马达1驱动时,主磁铁20以及传感器磁铁24与轴23一起旋转。
58.在轴向上,转子芯21也可以比定子芯31长。由此,来自转子2的磁通高效地流入定子芯31。
59.各永磁铁22固定于转子芯21。
60.传感器磁铁24固定于转子芯21。具体而言,传感器磁铁24以面向磁传感器5的方式固定于转子2的轴向上的一端侧。
61.传感器磁铁24是圆形的磁铁。在本实施方式中,传感器磁铁24是环状的磁铁。但是,传感器磁铁24的形状也可以是圆盘的形状。传感器磁铁24是用于检测转子2的旋转位置的磁铁。
62.传感器磁铁24以磁通容易流入磁传感器5的方式沿轴向被磁化。由此,能够将磁传感器5以面向传感器磁铁24的方式安装于定子3的轴向上的一端侧。但是,来自传感器磁铁24的磁通的方向并不限定于轴向。
63.传感器磁铁24的磁极数(例如,n极的数量)与主磁铁20的磁极数(例如,n极的数量)相同。传感器磁铁24被定位成传感器磁铁24的极性与主磁铁20的极性在周向上一致。即,在周向上,传感器磁铁24的磁极的位置与主磁铁20的磁极的位置一致。
64.电路基板4固定于定子3。磁传感器5固定于电路基板4,与传感器磁铁24相向。
65.转子2具体而言是主磁铁20具有第一磁极以及第二磁极,该第一磁极具有第一极性,该第二磁极具有与第一极性不同的第二极性。在本实施方式中,第一磁极是n极,第二磁极是s极。
66.在主磁铁20中,包括永磁铁22的区域(称为第一区域)作为1个磁极(例如,相对于定子3发挥n极的作用的磁极)发挥功能,在周向上彼此相邻的永磁铁22之间的区域(称为第二区域)作为另一个磁极(例如,相对于定子3发挥s极的作用的伪磁极)发挥功能。
67.图2是概略地表示主磁铁20的构造的剖视图。
68.转子芯21具有轴孔21b和至少1个磁铁插入孔21a。在本实施方式中,转子芯21具有
多个磁铁插入孔21a,在各磁铁插入孔21a中配置有至少1个永磁铁22。即,在本实施方式中,马达1是永磁铁埋入型马达。
69.在本实施方式中,永磁铁22的数量是转子2的磁极的数量n(n为4以上的偶数)的一半。转子2的磁极的数量n是相对于定子3作为n极发挥功能的磁极与相对于定子3作为s极发挥功能的磁极的数量的合计数量。转子2的n极和s极交替地位于转子2的周向上。
70.但是,马达1也可以是表面磁铁型马达(spm马达)。在该情况下,在转子芯21未形成有磁铁插入孔21a,在转子芯21的外周面安装有永磁铁22。
71.转子芯21由多个电磁钢板形成。转子芯21也可以是具有预先决定的形状的铁的芯。各电磁钢板例如具有0.2mm至0.5mm的厚度。电磁钢板沿轴向层叠。但是,转子芯21也可以是混合软磁性材料以及树脂而形成的树脂铁芯,以代替多个电磁钢板。
72.多个磁铁插入孔21a在转子芯21的周向上等间隔地形成。在本实施方式中,5个磁铁插入孔21a形成于转子芯21。各磁铁插入孔21a在轴向上贯穿转子芯21。
73.轴孔21b形成于转子芯21的中央部。轴孔21b在轴向上贯穿转子芯21。在轴孔21b内配置有轴23。
74.轴23通过聚对苯二甲酸丁二醇酯等热塑性树脂、压入、热装、或者敛缝而固定于转子芯21。热塑性树脂的形状根据马达1的用途而适当地调整。在该情况下,向轴孔21b填充作为非磁性体的热塑性树脂。
75.在各磁铁插入孔21a内配置有永磁铁22。各永磁铁22例如是平板状的永磁铁。在磁铁插入孔21a中,在永磁铁22的周围填充有树脂,由此永磁铁22被固定在磁铁插入孔21a内。但是,也可以通过使用树脂的固定方法以外的方法来固定永磁铁22。永磁铁22例如是含有钕或钐的稀土类磁铁。永磁铁22也可以是含有铁的铁氧体磁铁。永磁铁22的种类不限于本实施方式的例子,也可以由其他材料形成永磁铁22。
76.各磁铁插入孔21a内的各永磁铁22在径向上被磁化,由此来自主磁铁20的磁通流入定子3。在本实施方式中,各永磁铁22形成主磁铁20的n极(具体而言,相对于定子3发挥功能的n极)。并且,各永磁铁22(具体而言,来自永磁铁22的磁通)形成作为主磁铁20的伪磁极的s极(具体而言,相对于定子3发挥功能的s极)。
77.定子3配置于转子2的外侧。定子3具有定子芯31、线圈32以及绝缘体33。定子芯31是具有芯背部以及多个齿的环状的芯。
78.定子芯31例如由多个铁的薄板形成。在本实施方式中,定子芯31通过层叠多个电磁钢板而形成。各电磁钢板的厚度例如为0.2mm至0.5mm。
79.线圈32(即绕组)卷绕在安装于定子芯31的绝缘体33上。线圈32被绝缘体33绝缘。线圈32例如由含有铜或铝的材料制成。
80.绝缘体33由聚对苯二甲酸丁二醇酯(poly butylene terephthalate:pbt)、聚苯硫醚(poly phenylene sulfide:pps)、液晶聚合物(liquid crystal display:lcp)、聚对苯二甲酸乙二醇酯(poly ethylene terephthalate:pet)这样的绝缘性的树脂形成。由树脂形成的绝缘体33例如是0.035mm至0.4mm的厚度的膜。
81.例如,绝缘体33与定子芯31一体成形。但是,也可以与定子芯31分开地成形绝缘体33。在该情况下,在绝缘体33成形之后,绝缘体33嵌入定子芯31。
82.在本实施方式中,定子芯31、线圈32以及绝缘体33被模制树脂6覆盖。定子芯31、线
圈32以及绝缘体33例如也可以通过由含有铁的材料形成的圆筒状壳体来固定。在该情况下,例如,定子3与转子2一起通过热装而被圆筒状壳体覆盖。
83.磁传感器5通过检测传感器磁铁24的旋转位置来检测转子2的旋转位置。磁传感器5例如使用霍尔ic、磁阻元件(也称为mr元件)、巨磁阻元件(也称为gmr元件)、磁阻抗元件等元件。磁传感器5固定于从传感器磁铁24产生的磁通所通过的位置即检测位置。
84.安装于电路基板4的控制电路使用由磁传感器5得到的检测结果(例如,传感器磁铁24的n极与s极之间的交界即磁极变更点)来控制在定子3的线圈32中流动的电流,由此控制转子2的旋转。传感器磁铁24的磁极变更点是传感器磁铁24的极间部。
85.磁传感器5基于流入磁传感器5的磁场的变化、例如磁通密度或磁场强度的变化来检测传感器磁铁24和主磁铁20的磁极的位置(也称为相位)。即,磁传感器5检测来自传感器磁铁24的磁通,检测转子2的旋转位置。更具体而言,磁传感器5通过检测来自传感器磁铁24的n极的磁通以及朝向s极的磁通,来判别在传感器磁铁24的周向(也称为旋转方向)上磁场的朝向改变的时刻,具体而言,判别传感器磁铁24的磁极变更点。在传感器磁铁24中,在周向上交替地排列有n极和s极。因此,磁传感器5通过周期性地检测传感器磁铁24的磁极变更点,能够掌握旋转方向上的各磁极的位置(具体而言,转子2的旋转角以及相位)。
86.模制树脂6使磁传感器5以及电路基板4与定子3一体化。模制树脂6例如是不饱和聚酯树脂(bmc)或环氧树脂等热固化性模制树脂。
87.图3及图4是表示转子2与磁传感器5之间的位置关系的图。
88.在将从轴线ax(即,转子2的旋转轴)到磁传感器5的最短距离设为rh1,将从轴线ax到永磁铁22的最短距离设为rm1时,最短距离rh1与最短距离rm1的关系满足rh1>rm1。即,从轴线ax到磁传感器5的最短距离rh1比从轴线ax到永磁铁22的最短距离rm1长。
89.图5是表示在马达1中由主磁铁20产生的磁传感器5的检测误差消失的情况下的、从轴线ax到磁传感器5的最短距离rh1与轴向上的从主磁铁20到磁传感器5的最短距离l1的关系的图表。
90.在图5所示的例子中,到磁传感器5的最短距离rh1以及从轴线ax到永磁铁22的最短距离rm1的关系满足rh1>rm1。在图5所示的例子中,最短距离rm1为20.5mm。在该情况下,在最短距离rh1为21mm以上时,能够以与最短距离l1无关地消除在马达1中由主磁铁20产生的磁传感器5的检测误差的方式将磁传感器5安装于马达1。由此,即使在轴向上的从主磁铁20到磁传感器5的最短距离l1发生了变动的情况下,也能够降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
91.并且,如图4所示,在将转子芯21的最大半径设为r1时,最大半径r1与从轴线ax到磁传感器5的最短距离rh1的关系满足r1>rh1。即,转子芯21的最大半径r1比从轴线ax到磁传感器5的最短距离rh1大。换言之,磁传感器5位于满足r1>rh1的位置。在该情况下,磁传感器5在xy平面中位于转子2(具体而言,转子芯21)的外周面的内侧。由此,从线圈32产生的磁场对磁传感器5的影响降低,能够降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
92.图6是表示马达1内的磁传感器5的检测误差与从轴线ax到磁传感器5的最短距离rh1的关系的图表。在图6中,纵轴表示磁传感器5中的检测误差、即马达1中的转子2的旋转位置的检测误差[deg(电角)],横轴表示从轴线ax到磁传感器5的最短距离rh1[mm]。
[0093]
如图6所示,在最短距离rh1比5mm短的情况下,磁传感器5中的检测误差增加。因此,最短距离rh1优选为5mm以上。由此,即使在磁传感器5的配置位置从预先决定的位置偏离的情况下,也能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。其结果,能够防止马达效率的降低。
[0094]
进而,更优选从轴线ax到磁传感器5的最短距离rh1为9mm以上。由此,能够进一步降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
[0095]
并且,更优选从轴线ax到磁传感器5的最短距离rh1为15mm以上。由此,能够进一步降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
[0096]
图7是表示由马达1内的磁传感器5检测出的检测值与磁传感器5的位置的关系的图表。在图7中,纵轴表示马达1内的磁传感器5的检测值[t]。具体而言,纵轴表示由磁传感器5检测出的n极成分的磁通密度的最大值与s极成分的磁通密度的最大值的差(即,n极成分的磁通密度的最大值
‑
s极成分的磁通密度的最大值)。横轴表示从轴线ax到磁传感器5的最短距离rh1。
[0097]
图7中的线s1表示由配置于轴向上的从主磁铁20到磁传感器5的最短距离l1为3mm的位置的磁传感器5检测出的结果,线s2表示由配置于最短距离l1为5mm的位置的磁传感器5检测出的结果,线s3表示由配置于最短距离l1为7mm的位置的磁传感器5检测出的结果。
[0098]
如图7所示,进入磁传感器5的n极成分与s极成分一致的最短距离rh1(即,检测值为零时的最短距离rh1)根据轴向上的从主磁铁20到磁传感器5的最短距离l1而不同。并且,最短距离l1越短,从轴线ax到磁传感器5的最短距离rh1对磁传感器5的检测结果的影响越大。例如,如图7所示,在最短距离l1为3mm的情况下(即,图7中的线s1),从轴线ax到磁传感器5的最短距离rh1对磁传感器5的检测结果的影响大。
[0099]
因此,优选轴向上的从转子芯21到磁传感器5的最短距离l1为4mm以上。由此,能够降低从轴线ax到磁传感器5的最短距离rh1对磁传感器5的检测结果的影响。换言之,能够减少根据最短距离rh1的变动而产生的磁传感器5的检测结果的变动。例如,即使在磁传感器5的配置位置从预先决定的位置偏离的情况下,也能够降低最短距离rh1的影响。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0100]
更优选轴向上的从转子芯21到磁传感器5的最短距离l1为5mm以上。由此,能够进一步降低从轴线ax到磁传感器5的最短距离rh1对磁传感器5的检测结果的影响。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0101]
更优选轴向上的从转子芯21到磁传感器5的最短距离l1为7mm以上。由此,能够进一步降低从轴线ax到磁传感器5的最短距离rh1对磁传感器5的检测结果的影响。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0102]
在轴向上的从转子芯21到磁传感器5的最短距离l1为7mm的情况下,最短距离rh1优选为23mm。由此,在n极成分与s极成分之间平衡良好的磁通进入磁传感器5,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0103]
图8是概略地表示传感器磁铁24的构造的俯视图。在图8中,“n”表示传感器磁铁24的n极,“s”表示传感器磁铁24的s极。
[0104]
图9是表示示出传感器磁铁24的n极的磁通(具体而言,从n极朝向磁传感器5的磁通)的磁通密度的大小的图表。在图9中,横轴与图8所示的传感器磁铁24的n极处的位置p1
至p2的位置对应。即,从轴线ax到位置p1的距离与传感器磁铁24的内径rs1相同,从轴线ax到位置p2的距离与传感器磁铁24的外径rs2相同。从轴线ax到位置p3的距离由(rs1 rs2)/2表示。从轴线ax到位置p4的距离由(rs1 rs2)
×
3/4表示。
[0105]
如图8所示,在传感器磁铁24为环状的磁铁的情况下,传感器磁铁24具有内径rs1和外径rs2。在该情况下,传感器磁铁24的内径rs1、传感器磁铁24的外径rs2以及最短距离rh1的关系满足(rs1 rs2)/2<rh1<rs2。换言之,磁传感器5配置在满足(rs1 rs2)/2<rh1<rs2的位置。由此,从传感器磁铁24流入磁传感器5的磁通增加,能够提高由磁传感器5检测的检测结果的精度。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0106]
传感器磁铁24的内径rs1、传感器磁铁24的外径rs2以及最短距离rh1的关系更优选满足(rs1 rs2)
×
3/4<rh1<rs2。在该情况下,磁传感器5配置在来自传感器磁铁24的磁通密度大的位置。由此,从传感器磁铁24流入磁传感器5的磁通进一步增加,能够提高由磁传感器5检测的检测结果的精度。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0107]
在关于从主磁铁20进入磁传感器5的磁通的磁通密度的大小、例如漏磁通的多少在主磁铁20的n极与s极之间不同的情况下,产生由磁传感器5检测的检测结果的误差。例如,在磁传感器5中,在关于表示主磁铁20的n极的磁通的磁通密度的峰值的绝对值大于关于表示主磁铁20的s极的磁通的磁通密度的峰值的绝对值的情况下,产生由磁传感器5检测的检测结果的误差。因此,在磁传感器5中,以表示传感器磁铁24的s极的磁通密度(具体而言,由磁传感器5检测出的传感器磁铁24的s极成分的磁通密度的峰值的绝对值)大于表示传感器磁铁24的n极的磁通密度(具体而言,由磁传感器5检测出的传感器磁铁24的n极成分的磁通密度的峰值的绝对值)的方式对传感器磁铁24进行磁化。也可以以表示传感器磁铁24的s极的磁通密度的峰值的绝对值大于表示传感器磁铁24的n极的磁通密度的峰值的绝对值的方式配置磁传感器5。
[0108]
图10是表示在马达1中关于来自传感器磁铁24的磁通的磁通密度的变化的一例的图表。
[0109]
图11是表示在马达1中关于来自传感器磁铁24的磁通的磁通密度的变化s11、关于来自主磁铁20的磁通的磁通密度的变化s12、以及关于进入磁传感器5的磁通的磁通密度的变化s13的例子的图表。在图11中,纵轴的正侧表示由磁传感器5检测出的n极成分的磁通密度,负侧表示由磁传感器5检测出的s极成分的磁通密度。
[0110]
在图10所示的例子中,关于表示传感器磁铁24的n极的磁通的磁通密度的峰值的绝对值为0.01[t],关于表示传感器磁铁24的s极的磁通的磁通密度的峰值的绝对值为0.02[t]。因此,在磁传感器5中,关于表示传感器磁铁24的s极的磁通的磁通密度的峰值的绝对值大于关于表示传感器磁铁24的n极的磁通的磁通密度的峰值的绝对值。由此,例如,如图11中的线s12所示,即使在使用了在n极成分与s极成分之间产生不平衡的漏磁通的主磁铁20的情况下,也如线s13所示,在n极成分与s极成分之间平衡良好的磁通进入磁传感器5。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0111]
图12是表示在马达1中关于来自传感器磁铁24的磁通的磁通密度的变化s21、关于来自主磁铁20的磁通的磁通密度的变化s22、以及关于进入磁传感器5的磁通的磁通密度的
变化s23的例子的图表。在图12中,纵轴的正侧表示由磁传感器5检测出的n极成分的磁通密度,负侧表示由磁传感器5检测出的s极成分的磁通密度。
[0112]
在磁传感器5中,在关于表示主磁铁20的s极的磁通的磁通密度的峰值的绝对值大于关于表示主磁铁20的n极的磁通的磁通密度的峰值的绝对值的情况下(例如,图12中的线s22),产生由磁传感器5检测的检测结果的误差。因此,在磁传感器5中,关于表示传感器磁铁24的n极的磁通的磁通密度的峰值大于关于表示传感器磁铁24的s极的磁通的磁通密度的峰值(例如,图12中的线21)。换言之,在磁传感器5中,以关于表示传感器磁铁24的n极的磁通的磁通密度的峰值大于关于表示传感器磁铁24的s极的磁通的磁通密度的峰值的方式对传感器磁铁24进行磁化。也可以以关于表示传感器磁铁24的n极的磁通的磁通密度的峰值大于关于表示传感器磁铁24的s极的磁通的磁通密度的峰值的方式配置磁传感器5。
[0113]
由此,例如,如图12中的线s22所示,即使在使用了在n极成分与s极成分之间产生不平衡的漏磁通的主磁铁20的情况下,也如线s23所示,在n极成分与s极成分之间平衡良好的磁通进入磁传感器5。其结果,能够降低由磁传感器检测的检测结果的误差,能够防止马达效率的降低。
[0114]
以下说明实施方式1的马达1的优点。
[0115]
如上所述,实施方式1的马达1满足rh1>rm1。由此,即使在轴向上的从主磁铁20到磁传感器5的最短距离l1发生了变动的情况下,也能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。其结果,能够防止马达效率的降低。
[0116]
通常,当电流在定子的线圈中流动时,从线圈产生磁场。该磁场有时会对磁传感器的检测结果造成影响。因此,马达1满足r1>rh1。即,马达1满足r1>rh1>rm1。由此,从线圈32产生的磁场对磁传感器5的影响降低,能够降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
[0117]
在从轴线ax到磁传感器5的最短距离rh1为9mm以上时,能够进一步降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
[0118]
并且,在从轴线ax到磁传感器5的最短距离rh1为15mm以上时,能够进一步降低由磁传感器5检测的检测结果的误差。其结果,能够防止马达效率的降低。
[0119]
并且,在轴向上的从转子芯21到磁传感器5的最短距离l1为4mm以上时,能够降低从轴线ax到磁传感器5的最短距离rh1对磁传感器5的检测结果的影响。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。在马达1满足l1≥4mm且rh1≥9mm的情况下,能够有效地降低由磁传感器5检测的检测结果的误差。其结果,能够有效地防止马达效率的降低。
[0120]
在传感器磁铁24的内径rs1、传感器磁铁24的外径rs2以及最短距离rh1的关系满足(rs1 rs2)/2<rh1<rs2时,关于从传感器磁铁24流入磁传感器5的磁通的磁通密度增加,能够提高由磁传感器5检测的检测结果的精度。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0121]
传感器磁铁24的内径rs1、传感器磁铁24的外径rs2以及最短距离rh1的关系更优选满足(rs1 rs2)
×
3/4<rh1<rs2。由此,关于从传感器磁铁24流入磁传感器5的磁通的磁通密度进一步增加,能够提高由磁传感器5检测的检测结果的精度。其结果,能够有效地降低由磁传感器5检测的检测结果的误差,能够有效地防止马达效率的降低。
[0122]
在磁传感器5中,在关于表示主磁铁20的s极的磁通的磁通密度的峰值的绝对值大于关于表示主磁铁20的n极的磁通的磁通密度的峰值的绝对值的情况下,在磁传感器5中,关于表示传感器磁铁24的n极的磁通的磁通密度的峰值大于关于表示传感器磁铁24的s极的磁通的磁通密度的峰值。由此,即使在使用在n极成分与s极成分之间产生不平衡的漏磁通的主磁铁20的情况下,在n极成分与s极成分之间平衡良好的磁通也进入磁传感器5。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0123]
同样地,在磁传感器5中,在关于表示主磁铁20的n极的磁通的磁通密度的峰值的绝对值大于关于表示主磁铁20的s极的磁通的磁通密度的峰值的绝对值的情况下,在磁传感器5中,关于表示传感器磁铁24的s极的磁通的磁通密度的峰值的绝对值大于关于表示传感器磁铁24的n极的磁通的磁通密度的峰值的绝对值。由此,即使在使用在n极成分与s极成分之间产生不平衡的漏磁通的主磁铁20的情况下,在n极成分与s极成分之间平衡良好的磁通也进入磁传感器5。其结果,能够降低由磁传感器5检测的检测结果的误差,能够防止马达效率的降低。
[0124]
实施方式2
[0125]
图13是概略地表示本发明的实施方式2的风扇60的构造的图。
[0126]
风扇60具有叶片61和马达62。风扇60也称为送风机。马达62是实施方式2的马达1。叶片61固定于马达62的轴。马达62驱动叶片61。当马达62进行驱动时,叶片61旋转,生成气流。由此,风扇60能够送风。
[0127]
根据实施方式2的风扇60,将实施方式2中说明的马达1应用于马达62,因此能够得到与实施方式2中说明的效果相同的效果。并且,能够防止风扇60的效率降低。
[0128]
实施方式3
[0129]
对本发明的实施方式3的空气调节机50(也称为制冷空调装置或制冷循环装置)进行说明。
[0130]
图14是概略地表示实施方式3的空气调节机50的结构的图。
[0131]
实施方式3的空气调节机50具备:作为送风机(第一送风机)的室内机51;制冷剂配管52;以及经由制冷剂配管52与室内机51连接的作为送风机(第二送风机)的室外机53。
[0132]
室内机51具有:马达51a(例如,实施方式1的马达1);送风部51b,通过被马达51a驱动而送风;以及外壳51c,覆盖马达51a和送风部51b。送风部51b例如具有由马达51a驱动的叶片51d。例如,叶片51d固定于马达51a的轴,生成气流。
[0133]
室外机53具有马达53a(例如,实施方式1的马达1)、送风部53b、压缩机54以及热交换器(未图示)。送风部53b通过被马达53a驱动而送风。送风部53b例如具有由马达53a驱动的叶片53d。例如,叶片53d固定于马达53a的轴,生成气流。压缩机54具有马达54a(例如,实施方式1的马达1)、由马达54a驱动的压缩机构54b(例如,制冷剂回路)、以及覆盖马达54a和压缩机构54b的外壳54c。
[0134]
在空气调节机50中,室内机51和室外机53中的至少1个具有在实施方式1中说明的马达1。具体而言,作为送风部的驱动源,对马达51a以及53a的至少一方应用在实施方式1中说明的马达1。并且,也可以对压缩机54的马达54a应用在实施方式1中说明的马达1。
[0135]
空气调节机50例如能够进行从室内机51输送冷空气的制冷运转、输送暖空气的制热运转等空气调节。在室内机51中,马达51a是用于驱动送风部51b的驱动源。送风部51b能
够输送调整后的空气。
[0136]
根据实施方式3的空气调节机50,对马达51a和53a中的至少一方应用实施方式1中说明的马达1,因此能够得到与实施方式1中说明的效果相同的效果。并且,能够防止空气调节机50的效率的降低。
[0137]
并且,通过使用实施方式1的马达1作为送风机(例如室内机51)的驱动源,能够得到与在实施方式1中说明的效果相同的效果。由此,能够防止送风机的效率的降低。具有实施方式1的马达1和由马达1驱动的叶片(例如,叶片51d或53d)的送风机能够单独用作送风的装置。该送风机也能够应用于空气调节机50以外的设备。
[0138]
并且,通过使用实施方式1的马达1作为压缩机54的驱动源,能够得到与在实施方式1中说明的效果相同的效果。并且,能够防止压缩机54的效率的降低。
[0139]
在实施方式1中说明的马达1除了空气调节机50以外,还能够搭载于换气扇、家电设备或机床等具有驱动源的设备。
[0140]
以上说明的各实施方式中的特征以及各变形例中的特征能够相互适当组合。
[0141]
附图标记的说明
[0142]
1、51a、53a、62马达、2转子、3定子、5磁传感器、20主磁铁、21转子芯、22永磁铁、23轴、24传感器磁铁、50空气调节机、51室内机、53室外机、60风扇、61叶片。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。