pmsm驱动系统失磁故障控制方法、永磁同步电机
技术领域
1.本发明涉及一种永磁同步电机驱动系统的等价输入干扰(eid)容错控制方法,尤其涉及一种基于积分滑模观测器的等价输入干扰容错控制方法。
背景技术:
2.永磁同步电机因其高效率、高功率密度、高动态性能等优点而被广泛应用于各种高性能工业实践中,如电动汽车、工业机器人、航空航海、轨道交通等领域。尤其在高精度、高性能的工程应用中,永磁同步电机驱动系统的快速动态响应速度和高精度转矩响应性能显得十分重要。然而受复杂的工况下,高温、高负荷、电磁、机械等因素影响,pmsm转子永磁体(pm)的励磁性能下降,从而极易发生失磁故障。这导致了控制器的转子磁链与实际磁链的不匹配,必然造成pmsm 驱动系统性能的下降。因此,保持控制器良好的控制性能,实现对失磁故障的容错控制是保证pmsm驱动系统稳定运行的必要条件。
3.永磁体失磁故障的检测和抑制问题,逐渐引起了人们的重视,大量相关研究得以发表,特别是基于模型的方法成为众多学者研究的主要方法。这些方法中的如鲁棒控制、自适应控制、预测控制、滑模控制等都被广泛应用于机电系统中的扰动检测及抑制。其中,滑模观测器(smo)具有对扰动的鲁棒性、对系统参数变化的低灵敏度、快速响应和易于实现等优点,受到越来越多的关注。
4.然而上述方法使用反馈策略来设计系统,所设计的控制系统通常只有一个自由度。这导致了系统需要在控制性能之间做出权衡,如鲁棒性和容错性。当系统的外部扰动大时,通常采用高增益来减少扰动的影响。高增益在有效减小扰动影响的同时,带来的是系统鲁棒性能和标称性能的降低。与这些单自由度方法相比,具有两个自由度的主动扰动抑制方法得到广泛的关注。一个用于扰动抑制,另一个用于反馈补偿,其有效解决了单自由度系统中系统性能的权衡问题。常见的主动扰动抑制方法主要有基于扰动观测器(dob)的方法和自抗扰控制(adrc)的方法,都被广泛应用于pmsm驱动系统的扰动和故障抑制。上述两种主动扰动抑制方法,都是通过对控制器进行重构,实现对扰动和故障的容错控制,这改变了原有控制器的结构,大大增加了系统的风险。公开号为cn107482976a的发明专利申请公开一种用于永磁同步电机的失磁故障容错预测控制方法,用滑模观测器获得控制律,但该控制是对电流和转速的控制,没有从系统输入整体上对失磁故障进行预测和消除,失磁故障对系统的影响仍然不能消除。
技术实现要素:
5.针对永磁体失磁故障的容错控制问题,本文结合smo与pio的优点,并采用等价输入干扰方法,通过引入一个解耦系数和一个积分项,提出了一种基于积分滑模观测器的等价输入干扰方法。
6.该方法采用的技术方案是:
7.基于积分滑模观测器的pmsm驱动系统失磁故障抑制方法,所述积分滑模观测器方
程为:
[0008][0009]
式中分别是x(y)的估计值;u
f
是一个输入;l和l
i
是待设计的观测器增益;v是滑模控制函数;所述其中其中是待设计的,且有k1>0和k2>0;l
i1
>0和l
i2
>0;
[0010]
进一步地,基于所述积分滑模观测器的失磁故障抑制控制率为:式中u为系统输入、u
f
为失磁故障影响下的系统输入,为失磁故障的等价输入估计值。
[0011]
运用积分滑模观测器和等价输入干扰估计器对失磁故障的等价估计,对失磁故障进行补偿。
[0012]
进一步地,失磁故障下pmsm模型为:
[0013][0014]
进一步地,pmsm在d、q坐标系下的机械方程为:
[0015][0016]
式中,t
e
为pmsm的电磁转矩;t
l
为负载转矩;j为转动惯量;b为阻尼系数;ω
m
为转子机械角速度。
[0017]
进一步地,失磁故障下在d、q坐标系下的电流方程为:
[0018][0019]
式中,x,u,d,y分别为状态变量,系统输入,失磁故障,系统输出,定义x=[i
d i
q
]
t
;u=[u
d u
q
]
t
;d=[δλ
rd δλ
rq
]
t
。
[0020]
进一步地,所述电流方程运用等价扰动d
e
=[d
ed d
eq
]
t
进行描述的系统为:其中,d
e
是失磁故障d的等价输入故障。
[0021]
进一步地,选择的滑模面为
[0022]
进一步地,误差状态方程为:
[0023]
[0024]
进一步地,估计值满足δd为变量,且满足
[0025]
进一步地,通过设计低通滤波器h(s),得到滤波后的等价输入失磁故障
[0026]
所采用的积分滑模观测器引入了一个解耦系数和一个积分项,解耦系数的引入消除了电机速度对观测器误差的影响,有效的增强了等价失磁故障估计的准确性和系统的鲁棒性;积分项的引入有助于在系统设计中引入一个松弛变量,这增加了系统的灵活性。
附图说明
[0027]
图1为pmsm永磁体磁链的变化;
[0028]
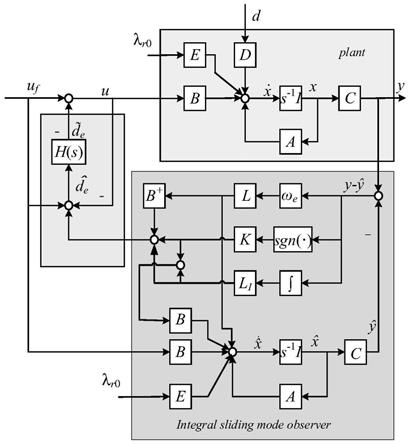
图2为基于积分滑模观测器的等价输入干扰系统;
[0029]
图3为基于积分滑模观测器的等价输入干扰pmsm驱动系统结构。
具体实施方式
[0030]
下面结合具体实施例进一步说明本发明。除非特别说明,本发明实施例中采用的原料和方法为本领域常规市购的原料和常规使用的方法。
[0031]
实施例1
[0032]
一种永磁同步电机,其pmsm驱动系统采用如下技术方案对pmsm驱动系统进行控制。
[0033]
s1.首先建立永磁同步电机pmsm驱动系统理想数学模型
[0034]
基于模型的永磁同步电机pmsm驱动系统中采用在标称参数下的理想数学模型,即忽略永磁同步电机铁心饱和、损耗,不考虑参数摄动时,得到pmsm 在d、q坐标系下的电压方程为
[0035][0036]
其中,永磁同步电机定子磁链方程为
[0037][0038]
式中r
s
为定子绕组电阻;u
d
(u
q
),i
d
(i
q
),l
d
(l
q
),λ
d
(λ
q
)分别为定子绕组d(q) 轴的电压分量,电流分量,电感分量和磁链分量;ω
e
为转子电角速度;λ
r0
为转子永磁体磁链。
[0039]
实际工程中,由于温度及其他因素的影响,转子永磁体易发生失磁故障,当永磁同步电机发生失磁故障时,永磁体磁链的大小和方向发生如附图1所示的改变,则对应式(2)的磁链方程变为
[0040][0041]
其中
[0042][0043][0044]
其中,δλ
rd
(δλ
rq
)分别为d(q)轴的磁链扰动分量,γ∈[0
°
,90
°
)。
[0045]
根据式(1)、(3)、(4)和(5),可以得到失磁故障下pmsm模型为
[0046][0047]
pmsm在d、q坐标系下的电磁转矩方程由式(7)变为式(8),即
[0048][0049][0050]
式中,n
p
为极对数。
[0051]
pmsm在d、q坐标系下的机械方程为
[0052][0053]
式中,t
e
为pmsm的电磁转矩;t
l
为负载转矩;j为转动惯量;b为阻尼系数;ω
m
为转子机械角速度。
[0054]
考虑到实际驱动系统中,电磁时间常数比机械时间常数小的多,可以认为
[0055][0056]
这样,式(6)可重写为
[0057][0058]
由此,可得到失磁故障下在d、q坐标系下的电流方程为
[0059]
[0060]
令令
[0061]
系统(12)可以描述为
[0062][0063]
式中,x,u,d,y分别为状态变量,系统输入,失磁故障,系统输出。定义 x=[i
d i
q
]
t
;u=[u
d u
q
]
t
;d=[δλ
rd δλ
rq
]
t
。
[0064]
s2.运用积分滑模观测器的等价输入干扰对失磁故障进行抑制
[0065]
将失磁故障视为一种扰动,根据eid理论,使用等价扰动d
e
=[d
ed d
eq
]
t
来描述系统(13)得到
[0066][0067]
其中,d
e
是失磁故障d的等价输入故障。
[0068]
针对系统(14)设计一个基于积分滑模观测器的等价输入干扰pmsm控制系统,如图2所示。该系统主要包含了一个状态方程,一个积分滑模观测器和一个等价输入干扰估计器。积分滑模观测器和等价输入干扰估计器实现了对失磁故障的等价估计,补偿了失磁故障。
[0069]
s21.设计积分滑模观测器
[0070]
传统的pmsm滑模观测器设计为:
[0071][0072]
通过引入一个解耦系数ω
e
和积分项构建了一个积分滑模观测器,即
[0073][0074]
式中分别是x(y)的估计值;u
f
是一个输入;l和l
i
是待设计的观测器增益;v是滑模控制函数。
[0075]
[0076]
其中是待设计的,且有k1>0和k2>0;l
i1
>0和 l
i2
>0。
[0077]
选择滑模面为
[0078][0079]
将状态方程(14)和(16)代入方程(18),得到误差状态方程为
[0080][0081]
将方程(16)代入方程(19)得到
[0082][0083]
根据(20),得到
[0084][0085]
假设存在一个变量δd满足
[0086][0087]
假设d
e
的估计值满足
[0088][0089]
将式(22)、(23)代入(21)中得到
[0090][0091]
比较式(16)和式(24)有
[0092][0093]
由此得到
[0094][0095]
其中
[0096]
b
=(b
t
b)
‑1b
t
ꢀꢀ
(27)
[0097]
s22.设计合理的低通滤波器h(s),得到滤波后的等价输入失磁故障
[0098][0099]
其中,和分别为和的拉普拉斯变换。
[0100]
被设计的低通滤波器满足
[0101]
[0102]
其中,为抗扰角频带,ω
r
为eid估计器所需的最高角频率。合理设计观测器保证了收敛于选择低通滤波器h(s)的时间常数使得对所有是满足的。
[0103]
因此,可以得到改进的失磁故障抑制控制率为
[0104][0105]
u为系统输入、u
f
为失磁故障影响下的系统输入,为失磁故障的等价输入估计值。改进的控制率提高了扰动抑制的性能,使失磁干扰对系统的影响趋向于零。
[0106]
s3.对积分滑模观测器稳定性及增益设计进行测试
[0107]
结合式(14)、(16)、(18)和(30)可以得到误差状态方程与积分滑模观测器的动力学方程为
[0108][0109]
式中存在
[0110]
a1 a2ω
e
=a
ꢀꢀ
(32)
[0111]
其中
[0112]
令
[0113]
a2‑
lc=0
ꢀꢀ
(33)
[0114]
可以得到
[0115]
l=a2c
ꢀꢀ
(34)
[0116]
其中c
=(c
t
c)
‑1c
t
。
[0117]
由此,可以得到
[0118][0119]
上式等式也可由等价输入干扰系统通过传统smo得到,即
[0120][0121]
比较式(35)和式(36)可知,相比于传统smo,积分滑模观测器的误差状态方程系数矩阵不含电机电角速度ω
e
,解耦系数ω
e
的引入消除了电机角速度对积分观测器误差系统的影响,同时注意到积分滑模观测器,其包含了一个积分项x
i
,积分项的引入增加了状态观测器的阶数和系统的输出。而高阶观测器可以实现对状态变量的快速动态估计,其次增益l
i
的额外自由度增强了观测器的鲁棒性。
[0122]
积分滑模观测器稳定性分析如下:
[0123]
假设1:对于d
e
和存在一个小的正的常数η1满足
[0124][0125]
定理1:存在小的正常数η1,η2和γ满足
[0126][0127]
其中i是单位矩阵,选择合适的增益l
i
和k,则设计的积分滑模观测器(16)是渐进收敛并最终稳定的。
[0128]
证明:选择李雅普诺夫函数为
[0129]
v1=e
t
e
ꢀꢀ
(39)
[0130]
对其求导得到
[0131][0132]
根据杨不等式可知,存在一个小正常数η2满足
[0133][0134]
由此可得
[0135][0136]
因此,由lyapunov稳定性理论可知,所设计的积分滑模观测器(16)是渐进收敛并最终有界的。
[0137]
系统稳定性分析如下:
[0138]
为了分析整个eid系统的稳定性,考虑一个增广系统,其包括设计的积分滑模观测器、低通滤波器h(s)及系统(14)。
[0139]
低通滤波器的状态空间方程为
[0140][0141]
结合式(26)、(30)和(43)可以得到
[0142][0143]
将式(30)和(43)代入式(14)可以得到
[0144][0145]
根据式(19)、(30)和(43)有
[0146][0147]
结合式(44)、(45)和(46),得到一个增广系统为
[0148][0149]
其中
[0150][0151][0152]
定理2:存在小的正常数η3,η4,η5和λ满足
[0153][0154]
则x将收敛于原点附近的邻域ω
[0155]
[0156]
其中τ为小的正常数,因此,增广系统(47)是全局一致最终有界的。
[0157]
证明:选择李雅普诺夫函数为
[0158]
v2=x
t
x
ꢀꢀ
(50)
[0159]
对式(50)求导得
[0160][0161]
根据杨不等式有η3,η4,η5满足
[0162][0163][0164][0165]
则有
[0166][0167]
当x在区域ω外时,有
[0168][0169]
因此可以得到,在时有
[0170][0171]
这就完成了系统稳定性证明。
[0172]
设计的失磁故障容错控制方法通过一个pmsm驱动系统的应用实例得以验证,整个系统框架图如附图3所示。
[0173]
显然,上述实例仅仅是为清楚地说明本发明的技术方案所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。