1.本实用新型属于玩具技术领域,具体涉及一种具有直行后转弯模式的智能小车。
背景技术:
2.玩具汽车的结构有惯性式、机械式、电动式及电动遥控式等。玩具汽车与仿真汽车模型相比,其尺寸设计灵活,工艺略为粗糙,材料简单。一般采用普通塑料、铁皮制造。
3.相关技术中,智能小车不能够根据本身的控制进入直行模式或转弯模式或是由直行模式变为转弯模式,其行动模式需要受到外部的控制才能够进行,操作复杂。
技术实现要素:
4.有鉴于此,本实用新型的目的在于克服现有技术的不足,提供一种具有直行后转弯模式的智能小车以解决现有的智能小车需要受到外部控制才能进入直行模式或转弯模式的问题。
5.为实现以上目的,实用新型采用如下技术方案:一种具有直行后转弯模式的智能小车,包括:包括:小车本体,所述小车本体上设有四个车轮;所述小车本体上还设有第一方波产生模块、第二方波产生模块和第三方波产生模块,所述第一方波产生模块、第二方波产生模块和第三方波产生模块分别连接有第一行进模块、第二行进模块、第三行进模块,所述小车本体上还设有电机驱动模块、电机以及控制模块,所述第一行进模块、第二行进模块、第三行进模块的一端依次连接,所述第三行进模块的另一端、电机驱动模块以及电机分别与所述控制模块连接;
6.所述第一行进模块用于根据所述第一方波产生模块以预设时间参数输出的方波产生直行的控制信号;
7.所述第二行进模块用于根据所述第二方波产生模块以预设时间参数输出的方波产生转弯的控制信号;
8.所述第三行进模块用于根据所述第三方波产生模块以预设时间参数输出的方波产生直行的控制信号;
9.所述控制模块用于对接收的控制信号进行处理后输出电压信号至电机驱动模块;
10.所述电机驱动模块用于根据接收到的电压信号驱动电机,所述电机带动车轮移动。
11.进一步的,所述小车本体上还设有
12.数值输出模块,用于输出转速档位值;
13.所述数值输出模块与所述控制模块连接。
14.进一步的,所述电机驱动模块包括第一电机驱动模块和第二电机驱动模块;
15.所述电机包括左前轮电机、左后轮电机、右前轮电机以及右后轮电机;
16.所述第一电机驱动模块用于驱动左前轮电机和左后轮电机,所述第二电机驱动模块用于驱动右前轮电机以及右后轮电机。
17.进一步的,所述小车本体上还设有:
18.多个连接模块;
19.所述连接模块用于连接所述第一电机驱动模块与控制模块、以及连接所述第二电机驱动模块与控制模块。
20.进一步的,多个连接模块包括:第一连接模块、第二连接模块、第三连接模块以及第四连接模块;
21.所述第一电机驱动模块依次连接第一连接模块、第二连接模块后与所述控制模块连接;
22.所述第二电机驱动模块依次连接第四连接模块、第三连接模块后与所述控制模块连接。
23.进一步的,所述小车本体上还设有:
24.速度传感器,用于采集所述小车本体的速度;
25.所述速度传感器与所述控制模块连接。
26.进一步的,所述小车本体上还设有:
27.显示模块,用于显示小车速度和档位;
28.所述显示模块与所述控制模块连接。
29.进一步的,所述小车本体上还设有:
30.多个led指示灯,用于在指示灯亮时表示小车的行进状态。
31.进一步的,所述小车本体上还设有:
32.电源模块,用于为所述智能小车提供电能。
33.进一步的,所述第一方波产生模块、第二方波产生模块、第三方波产生模块、第一行进模块、第二行进模块、第三行进模块均与所述小车本体可拆卸连接。
34.本实用新型采用以上技术方案,所能达到的有益效果包括:
35.本技术实施例提供的一种具有直行后转弯模式的智能小车,所述小车本体上设有四个车轮;小车本体上还设有第一方波产生模块、第二方波产生模块和第三方波产生模块,第一方波产生模块、第二方波产生模块和第三方波产生模块分别连接有第一行进模块、第二行进模块、第三行进模块,小车本体上还设有电机驱动模块、电机以及控制模块,第一行进模块、第二行进模块、第三行进模块的一端依次连接,第三行进模块的另一端、电机驱动模块以及电机分别与控制模块连接。本技术提供的小车能够在通电后根据预设的轨迹行进,即小车延时一段时间后前进一段距离,之后右转,之后再向前进行一段距离,之后刹车停下,无需遥控控制。
附图说明
36.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
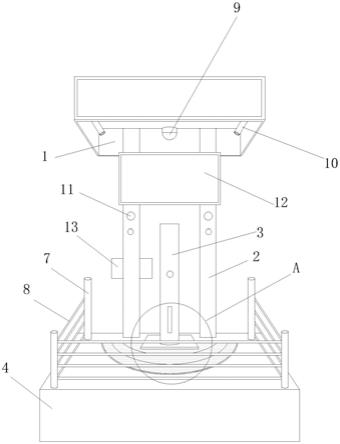
37.图1为本实用新型一种具有直行后转弯模式的智能小车的结构示意图;
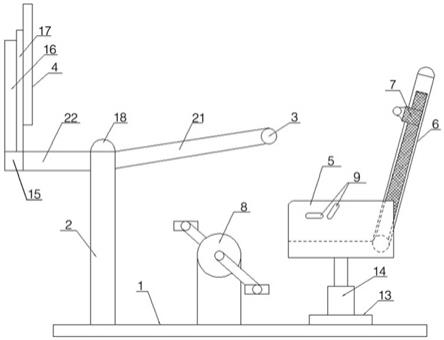
38.图2为本实用新型小车行进轨迹示意图;
39.图3为本实用新型方波产生模块产生的方波示意图;
40.图4为本实用新型方波产生模块产生的方波示意图。
具体实施方式
41.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
42.下面结合附图介绍本技术实施例中提供的一个具体的具有直行后转弯模式的智能小车。
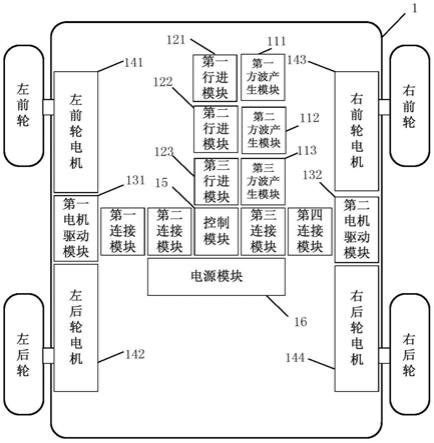
43.如图1所示,本实用新型提供一种具有直行后转弯模式的智能小车,包括:小车本体1,所述小车本体1上设有四个车轮;所述小车本体1上还设有第一方波产生模块111、第二方波产生模块112和第三方波产生模块113,所述第一方波产生模块111、第二方波产生模块112和第三方波产生模块113分别连接有第一行进模块121、第二行进模块122、第三行进模块123,所述小车本体1 上还设有电机驱动模块、电机以及控制模块15,所述第一行进模块121、第二行进模块122、第三行进模块123的一端依次连接,所述第三行进模块123的另一端、电机驱动模块以及电机分别与所述控制模块15连接;
44.所述第一行进模块121用于根据所述第一方波产生模块111输出的方波产生直行的控制信号;
45.所述第二行进模块122用于根据所述第二方波产生模块112输出的方波产生转弯的控制信号;
46.所述第三行进模块123用于根据所述第三方波产生模块113输出的方波产生直行的控制信号;
47.所述控制模块15用于对接收的控制信号进行处理后输出电压信号至电机驱动模块;
48.所述电机驱动模块用于根据接收到的电压信号驱动电机,所述电机带动车轮移动。
49.其中,预设时间参数包括启动时间和停止时间,小车启动时间就是方波开始时间,小车停止时间也就是方波停止时间。第一方波产生模块111、第二方波产生模块112、第三方波产生模块113的时间参数可以不同。可以理解的是,所有的方波产生模块中设有存储芯片,能够接收外部数值模块输送的数值信息,以更改时间参数。
50.优选的,所述第一方波产生模块、第二方波产生模块、第三方波产生模块、第一行进模块、第二行进模块、第三行进模块均与所述小车本体可拆卸连接。
51.本技术提供的一种具有直行后转弯模式的智能小车的工作原理是,本技术提供的智能小车上设有四个车轮,分别为左前轮、左后轮、右前轮、右后轮;本技术中将三个行进模块级联设置,第一行进模块121为直行模式,包括前进和后退;第二行进模块122为转弯模式,包括左转或右转;第三行进模块123 为直行模式,包括前进和后退;三个行进模块分别存储一个正值、负值、正值的参数值,代表三个模块设定的运行状态分别为前进、右转与前进。三个行进模块通过右侧的方波产生模块产生相应波形,控制模块15对应运行状态执行
的时间。
52.在第一行进模块121输出直行控制信号时(右方方波为高电平),该控制信号通过下方的第二行进模块122和第三行进模块123传递给控制模块15,控制电机驱动模块驱动小车前进。到达第一行进模块121预设的停止时间后,第一行进模块121右方方波产生模块由高电平变为低电平时,表示上方级联解除,此时右方的第二方波产生模块112根据预设时间参数正常输出波形,第二行进模块122给出小车右转的控制信号,该信号通过第三行进模块123传递给控制模块15,控制电机驱动模块驱动小车右转。其中,右转信号为高电平。
53.当到达第二行进模块122预设的停止时间后,第二行进模块122右方方波产生模块由高电平变为低电平时,第二行进模块122相当于被拔除。此时第三行进模块123右由高电平变为低电平,表示上方级联解除,此时第三方波产生模块113正常输出波形,第三行进模块123给出小车前进的控制信号,该信号输出给下方控制模块15,控制模块15控制电机驱动模块驱动小车前进至预设的停止时间停止。由此完成如图2所示的行进轨迹。
54.其中,电机采用直流电机。
55.电机驱动模块与电机连接,从而控制电机运转;通过任一母头接收控制信号,确定电机状态(前进、后退、刹车)与电机转速。除了控制信号之后,电机驱动模块还要通过母头连接电源。本技术中电机驱动模块的型号为l298n,当然,还可以采用其他型号的芯片,本技术在此不做限定。
56.方波产生模块输出方波的原理是,方波产生模块11预设有两个时间参数分别为方波开始时间t1和方波结束时间t2,如t1<t2,则输出如图3所示的方波信号;或者输出如图4所示的延时高电平信号。其时间参数可通过模块上部的参数切换开关分别在二位数码管上显示。同时,方波产生模块11下部有时间单位切换开关,可以在“秒”与“0.1秒”间切换时间单位。此外,方波产生模块 11上方母头还可连接一个循环模块,可实现波形循环。小车行进模式为直行,行进速度档位为9。如输入图3所示的方波信号,则小车在延时一段时间后以9 的速度一直往前进;如输入图4所示的方波信号,则小车在延时一段时间后以 9的速度往前行进一段时间后刹车停下。
57.方波产生模块的工作原理是,未通电时,方波产生模块不执行波形输出,输出一直保持低电平延时状态,即此时仅输入时间参数。注意:输入时间参数可大于99,此情况下参数显示保持99。通电后,则开始执行波形输出。在执行波形输出过程中,先进行低电平延时的倒计时显示(如超出99的范围则显示 99)。倒计时先以秒为单位,在10秒内则自动切换为0.1秒单位的倒计时;低电平延时完成后(即到达t1时间),开始输出高电平。如t2<t1,则显示数值保持为99,否则进行如低电平延时同样的倒计时方式。同时输出高电平时,led 指示灯亮起。
58.本技术中行进模块可以使得小车前进然后右转再前进,即小车延时一段时间后前进一段距离,之后右转,之后再向前进行一段距离,之后刹车停下。可以理解的是,本技术中的小车通过自身模块预设的属性行进,实现直行、右转再直行,不需要人为操作。本技术中还可以设置多个方波产生模块和多个行进模块,行进模块可具有多种模式,多个具有多种模式的行进模块级联,从而实现想要的行进模式,控制小车多样化的行进轨迹。
59.一些实施例中,所述小车本体1上还设有
60.数值输出模块(图中未示出),用于输出转速档位值;
61.所述数值输出模块与所述控制模块15连接。
62.具体的,数值输出模块,向行进模块输入一个1
‑
19的数值。将此数值存储入模块并赋值于变量。此变量将映射为
‑
9~9的转速档位值。小车便可根据转速档位值运行:直行模式下,转速档位为正,小车以设定速度前进;转速档位为负,小车以设定速度后退;
63.一些实施例中,所述电机驱动模块包括第一电机驱动模块131和第二电机驱动模块132;
64.所述电机包括左前轮电机141、左后轮电机142、右前轮电机143以及右后轮电机144;
65.所述第一电机驱动模块用于驱动左前轮电机141和左后轮电机142,所述第二电机驱动模块用于驱动右前轮电机143以及右后轮电机144。
66.其中,左前轮电机141用于驱动左前轮、左后轮电机142用于驱动左后轮、右前轮电机143用于驱动右前轮以及右后轮电机144用于驱动右后轮。其中左前轮与左后轮控制策略一致,右前轮与右后轮控制策略一致,它们分别连接各自的电机驱动模块接收相应的控制信号;电机驱动接收来控制模块15输出的控制信号与数据控制电机运行。
67.一些实施例中,所述小车本体1上还设有:
68.多个连接模块;
69.所述连接模块用于连接所述第一电机驱动模块131与控制模块15、以及连接所述第二电机驱动模块132与控制模块15。
70.优选的,多个连接模块包括:第一连接模块、第二连接模块、第三连接模块以及第四连接模块;
71.所述第一电机驱动模块131依次连接第一连接模块、第二连接模块后与所述控制模块15连接;
72.所述第二电机驱动模块132依次连接第四连接模块、第三连接模块后与所述控制模块15连接。
73.可以理解的是,本技术对连接模块的个数并不限定。用户可以根据实际需要进行设置,连接模块用于输出连接信号。
74.优选的,所述小车本体1上还设有:
75.速度传感器(图中未示出),用于采集所述小车本体1的速度;
76.所述速度传感器与所述控制模块15连接。
77.优选的,所述小车本体1上还设有:
78.显示模块(图中未示出),用于显示小车速度和档位;
79.所述显示模块与所述控制模块15连接。
80.可以理解的是,小车本体1上还可以设有其他传感器,本技术在此不做限定,通过速度传感器,可以采集小车的运行速度,显示模块可以帮助用户查看速度和档位。其中,显示模块可以采用显示屏。
81.优选的,所述小车本体1上还设有:
82.多个led指示灯(图中未示出),用于在指示灯亮时表示小车的行进状态。小车行进/刹车信号的高电平决定了小车运行的时长,在此时长的运行模式为直行时取决于直行引脚信号,而具体的运行状态(前进/后退)取决于转速档位数值的正负。其运行状态分别由
4个led指示灯指示。小车若处于刹车状态则4 个led指示灯皆不亮。
83.一些实施例中,所述小车本体1上还设有:
84.电源模块16,用于为所述智能小车提供电能。
85.其中,电源模块16可以采用蓄电池。
86.作为一个具体的实施方式,本技术在小车本体1上设有电源开关,即连接电源,第一方波产生模块111根据预设的时间参数产生相应时间的高电平,第一行进模块121根据高电平输出相应的直行控制信号至第二行进模块122,第二行进模块122将控制信号传递至第三行进模块123,第三行进模块123再将控制信号发送至控制模块15,控制模块15控制电机驱动模块驱动电机实现小车的直流,到达第一方波产生模块111预设的停止时间后,第一方波产生模块 111高电平变为低电平,此时第二方波产生模块112根据预设的时间参数产生相应的高电平,第二行进模块122根据该高电平输出相应的右转控制信号并传递给第三行进模块123,第三行进模块123将控制信号发送至控制模块15,控制模块15控制电机驱动模块驱动电机实现小车转弯,到达第二方波产生模块 112预设的停止时间后,第二方波产生模块112高电平变为低电平,此时,第三方波产生模块113根据预设的时间参数产生相应的高电平,第三行进模块123 根据高电平输出相应的直行控制信号至控制模块15,控制模块15对接收到的控制信号进行处理后输出至第一电机驱动模块131和第二电机驱动模块132,第一电机驱动模块131驱动左前轮电机141、左后轮电机142,第二电机驱动模块132驱动右前轮电机143、右后轮电机144,每个电机带动其相应的车轮转动。从而实现小车的先直行然后转弯然后再直行。
87.综上所述,本实用新型提供的具有直行后转弯模式的智能小车,所述小车本体上设有四个车轮;小车本体上还设有第一方波产生模块、第二方波产生模块和第三方波产生模块,第一方波产生模块、第二方波产生模块和第三方波产生模块分别连接有第一行进模块、第二行进模块、第三行进模块,小车本体上还设有电机驱动模块、电机以及控制模块,第一行进模块、第二行进模块、第三行进模块的一端依次连接,第三行进模块的另一端、电机驱动模块以及电机分别与控制模块连接。本技术提供的小车能够在通电后根据预设的轨迹行进,即小车延时一段时间后前进一段距离,之后右转,之后再向前进行一段距离,之后刹车停下。
88.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。