1.本发明属于无人机领域,尤其涉及一种针对无人机反制设备的探测定位方法及系统。
背景技术:
2.近年来,无人机行业发展迅猛,特别是民用微型多旋翼无人机,因为其安全、便携、易部署、娱乐性强等特点,深受大众喜爱,被广泛应用于各种使用场景中。随着无人机的发展,无人机集群表演项目也越来越多,特别是重大展会、重要节日的无人机灯光表演越来越受欢迎。
3.但伴随着无人机行业的发展,商业竞争也逐渐白热化,不免有不法商家将无人机反制手段恶意地使用到不正当竞争当中,不法分子利用无人机反制设备恶意干扰、破坏无人机集群表演的案例也时有发生,而在追溯侦查过程中,往往由于缺乏现场监控数据,难以对这类无人机反制设备进行追溯。因此,需要设计一种针对无人机反制设备的探测定位方法及系统,在无人机集群表演过程中实现对非法无人机反制设备的快速、精准定位。
技术实现要素:
4.本发明目的在于针对上述技术问题提供一种针对无人机反制设备的探测定位方法及系统,以便于快速、精准地实现对无人机反制设备的实时定位。
5.为实现上述目的,本发明的具体技术方案如下:本发明提供了一种针对无人机反制设备的探测定位方法,应用于针对无人机反制设备的探测定位系统中,所述探测定位系统包括多个探测模块、计算操控模块及定位显示模块,所述探测模块均与所述计算操控模块通信连接,所述计算操控模块与所述定位显示模块通信连接,所述探测模块包括信号接收单元及滤波转化单元,所述针对无人机反制设备的探测定位方法包括以下步骤:s1:将多个探测模块间隔设置在所需探测的区域范围内,同时启动所有探测模块,每个信号接收单元均持续获取探测范围内的无人机反制设备发射的电磁信号并传输至滤波转化单元;s2:滤波转化单元判断接收的电磁信号的频段是否在预设指定频段内,若是,则将所述电磁信号转化为对应的数字信号传输至计算操控模块;s3:计算操控模块依据接收到的数字信号对无人机反制设备进行测向,确定无人机反制设备相对于对应探测模块的方向及距离;s4:计算操控模块依据无人机反制设备相对于各个探测模块的方向及距离计算生成无人机反制设备的位置信息,并传输至定位显示模块进行显示。
6.进一步的,步骤s2中的预设指定频段包括:0.075ghz、0.4ghz、0.8ghz、0.9ghz、1.1ghz、1.2ghz、1.4ghz、1.6ghz、2.4ghz、2.5ghz、5.8ghz、1.5ghz gps。
7.进一步的,所述信号接收单元为间隔设置的多组探测天线,步骤s3中计算操控模
块从接受到的数字信号中提取出对应电磁信号到达各组探测天线的时间差异和强度差异计算出无人机反制设备相对于对应探测模块的方向及距离。
8.进一步的,所述计算操控模块还包括频谱分析单元,步骤s3中频谱分析单元依据计算操控模块接收到的数字信号分析并生成频谱波峰数据,计算操控模块依据频谱波峰数据计算出电磁信号发射源的方位角与俯仰角来确定无人机反制设备相对于对应探测模块的方向及距离。
9.进一步的,定位显示模块还包括存储单元,存储单元中存储有预制电子地图,步骤s4中计算计算操控模块依据无人机反制设备相对于各个探测模块的方向及距离结合toa定位算法以及aoa定位算法计算生成无人机反制设备的位置信息,并传输至定位显示模块后,定位显示模块匹配存储单元内的预制电子地图生成定位信息进行显示。
10.进一步的,所述探测定位系统还包括通讯报警模块,步骤s4中定位显示模块生成定位信息进行显示的同时,将所述定位信息通过通讯报警模块传输至外部监管系统进行报警。
11.本发明还提供了一种针对无人机反制设备的探测定位系统,其特征在于,包括:至少一个探测模块,用于获取探测范围内的无人机反制设备发射的电磁信号并转化为数字信号;计算操控模块,用于依据接收到的数字信号对无人机反制设备进行测向确定无人机反制设备相对于对应探测模块的方向及距离,并依据无人机反制设备相对于各个探测模块的方向及距离计算生成无人机反制设备的位置信息;定位显示模块,用于显示无人机反制设备的位置信息。
12.进一步的,所述探测模块包括:信号接收单元,用于持续获取探测范围内的无人机反制设备发射的电磁信号;滤波转化单元,用于过滤预设指定频段的电磁信号,并将过滤后的电磁信号转化为对应的数字信号传输至计算操控模块。
13.进一步的,所述计算操控模块包括:频谱分析单元,用于依据计算操控模块接收到的数字信号分析并生成频谱波峰数据;计算单元,用于依据频谱波峰数据测算无人机反制设备相对于各个对应探测模块的方向及距离,并依据无人机反制设备相对于各个探测模块的方向计算生成无人机反制设备的位置信息。
14.进一步的,探测定位系统还包括通讯报警模块,用于将所述位置信息传输至外部监管系统进行报警。
15.本发明具有以下优点:通过滤波转化单元能够精准过滤预设指定频段之外的电磁信号,迅速确定无人机反制设备发射的干扰电磁信号;仅需在探测范围内设置一个探测装置即可完成得出无人机反制设备的位置;当探测范围内设置的探测装置越多时,通过测算无人机反制设备相对于各个探测模块的方向及距离,所测得无人机反制设备的位置也越精准;另外通过通讯报警模块还可以将无人机反制设备的位置快速共享给外部监管系统,协助监管部门对非法无人机反制设备及行为采取制止措施。
附图说明
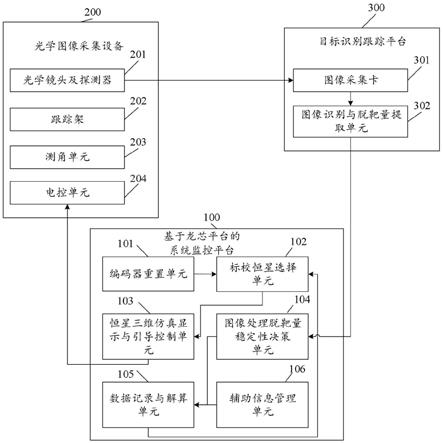
16.图1为本发明中一种针对无人机反制设备的探测定位方法的方法流程图;图2为本发明中一种针对无人机反制设备的探测定位系统的结构框图;图中标记说明:1、探测模块;11、信号接收单元;12、滤波转化单元;2、计算操控模块;21、频谱分析单元;22、计算单元;3、定位显示模块;31、显示单元;32、存储单元;4、通讯报警模块。
具体实施方式
17.为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种针对无人机反制设备的探测定位方法及系统做进一步详细的描述。
18.如图1、图2所示,本发明的实施例提供了一种针对无人机反制设备的探测定位方法,应用于针对无人机反制设备的探测定位系统中,探测定位系统包括至少一个探测模块1、计算操控模块2及定位显示模块3,探测模块1均与计算操控模块2通信连接,计算操控模块2与定位显示模块3通信连接,其中探测模块1包括信号接收单元11及滤波转化单元12。针对无人机反制设备的探测定位方法可以包括以下步骤:在所需探测的区域范围内设置至少一个探测模块1,当在所需探测的区域范围内设置多个探测模块1时,需要保持探测模块1之间有一定间隔,如在所需探测的区域范围内每间隔1公里设置1个探测模块。
19.启动所有探测模块1,每个信号接收单元11均持续获取探测范围内的无人机反制设备发射的电磁信号并传输至滤波转化单元12。
20.滤波转化单元12判断接收的电磁信号的频段是否在预设指定频段内,若是,则将所述电磁信号转化为对应的数字信号传输至计算操控模块2。其中预设指定频段可以包括0.075ghz、0.4ghz、0.8ghz、0.9ghz、1.1ghz、1.2ghz、1.4ghz、1.6ghz、2.4ghz、2.5ghz、5.8ghz等常见通讯频段以及1.5ghz gps等常见导航频段。
21.计算操控模块2依据接收到的数字信号对无人机反制设备进行测向,确定无人机反制设备相对于对应探测模块1的方向及距离。
22.其中,信号接收单元11可以是间隔设置的多组探测天线,计算操控模块2从接受到的数字信号中提取出对应电磁信号到达各组探测天线的时间差异和强度差异计算出无人机反制设备相对于对应探测模块1的方向及距离。
23.计算操控模块2还可以包括频谱分析单元21,频谱分析单元21依据计算操控模块2接收到的数字信号分析并生成频谱波峰数据,计算操控模块2依据频谱波峰数据计算出电磁信号发射的方位角与俯仰角来确定无人机反制设备相对于各个探测模块1的方向及距离。
24.计算操控模块2可以依据无人机反制设备相对于各个探测模块1的方向及距离结合toa定位算法以及aoa定位算法计算生成无人机反制设备的位置信息,并传输至定位显示模块3进行显示。其中,定位显示模块3可以包括存储单元32,存储单元32中存储有预制电子地图,定位显示模块3将接收到的位置信息匹配存储单元32内的预制电子地图生成定位信
息进行显示,能够更加直观、精准的显示无人机反制设备的位置。
25.在针对无人机反制设备的探测定位方法中,所应用的探测定位系统还可以包括通讯报警模块4,定位显示模块3生成定位信息进行显示的同时,可以将所述定位信息通过通讯报警模块4传输至外部监管系统进行报警、备案,协助监管部门快速确定无人机反制设备的位置,便于及时采取制止措施。
26.本发明中的实施例还提供了一种针对无人机反制设备的探测定位系统,可以包括:至少一个探测模块1,可以获取探测范围内的无人机反制设备发射的电磁信号并转化为数字信号;计算操控模块2,可以依据接收到的数字信号对无人机反制设备进行测向确定无人机反制设备相对于对应探测模块1的方向,并依据无人机反制设备相对于各个探测模块1的方向及距离计算生成无人机反制设备的位置信息;定位显示模块3,可以显示无人机反制设备的位置信息。
27.其中,探测模块1可以包括:信号接收单元11,可以持续获取探测范围内的无人机反制设备发射的电磁信号;滤波转化单元12,可以过滤预设指定频段的电磁信号,并将过滤后的电磁信号转化为对应的数字信号传输至计算操控模块2。
28.计算操控模块2可以包括:频谱分析单元21,可以依据计算操控模块2接收到的数字信号分析并生成频谱波峰数据;计算单元22,可以依据频谱波峰数据测算无人机反制设备相对于各个对应探测模块1的方向及距离,并依据无人机反制设备相对于各个探测模块1的方向及距离计算生成无人机反制设备的位置信息。
29.定位显示模块3可以包括:存储单元32,存储有预制电子地图;显示单元31,可以将接收到的位置信息匹配存储单元32内的预制电子地图生成定位信息进行显示。
30.探测定位系统还可以包括通讯报警模块4,可以将无人机反制设备的位置信息传输至外部监管系统进行报警。
31.本实施例中的针对无人机反制设备的探测定位系统在使用时,信号接收单元11可以持续获取探测范围内的无人机反制设备发射的电磁信号,滤波转化单元12可以过滤预设指定频段的电磁信号,并将过滤后的电磁信号转化为对应的数字信号传输至计算操控模块2,频谱分析单元21可以依据计算操控模块2接收到的数字信号分析电磁信号到达各信号接收单元11的时间和强度并生成频谱波峰数据,计算单元22可以依据频谱波峰数据测算无人机反制设备相对于各个对应探测模块1的方向及距离,并依据无人机反制设备相对于各个探测模块1的方向及距离计算生成无人机反制设备的位置信息,显示单元31可以将接收到的位置信息匹配存储单元32内的预制电子地图生成定位信息进行显示,完成对无人机反制设备的探测定位过程。通讯报警模块4还可以将无人机反制设备的位置信息传输至外部监管系统进行报警,协助监管部门对无人机反制设备的快速定位。
32.本发明提供了一种可以快速、精准地针对无人机反制设备进行探测定位的方法及系统,通过滤波转化单元12能够精准过滤预设指定频段之外的电磁信号,迅速确定无人机反制设备发射的干扰电磁信号类型;仅需在探测范围内设置一个探测装置即可完成得出无人机反制设备的位置;当设置多个探测装置1进行探测时,能够通过测算无人机反制设备相对于各个探测模块的方向,更加准确确定无人机反制设备的位置;通过通讯报警模块可以将无人机反制设备的位置快速共享给外部监管系统,协助监管部门对非法无人机反制设备及行为采取制止措施。
33.可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。