1.本公开涉及信息识别技术领域,尤其涉及基于视频图像识别算法的仪器仪表读数识别方法。
背景技术:
2.指针或示数式仪器仪表在日常工作中有着非常广泛的应用,但是就目前而言,仪器仪表主要由操作人员人眼进行读数,在应用于工业领域时,不但效率低下,常常会因为人眼的疲劳等原因,造成读数的误差,严重影响着计量结果。
3.随着计算机技术的发展,机器读数代替读数渐渐成为一个新的方向。现有技术中,机器读数主要采用图像处理算法来实现,但是,目前的图像处理算法在进行读数识别时,存在着精度不高的问题;同时,对于一般仪器仪表图像采集而言,采集到的往往是视频信息,在视频信息中各帧图像的读数往往有所差异,进一步影响了机器读数的精度。
技术实现要素:
4.本公开提供的基于视频图像识别算法的仪器仪表读数识别方法,解决了现有技术中仪表数字读数精度低的技术问题。
5.解决上述技术问题采用的一些实施方案包括:
6.基于视频图像识别算法的仪器仪表读数识别方法,包括以下步骤:
7.获取承载有仪器仪表示数信息的示数视频;
8.获取承载有仪器仪表示数信息的示数图片,其中,所述示数图片包括至少两张,所述示数图片由所述示数视频生成;
9.获取采样图片,其中,在每张所述示数图片上生成虚拟坐标,包含有虚拟坐标的示数图片为采样图片;
10.获取识别区域,其中,获取每张采样图片上的示数区域,所述示数区域包含仪器仪表示数信息和虚拟坐标,根据所述虚拟坐标融合所有所述采样图片上的示数区域形成所述识别区域;
11.获取示数,根据所述识别区域获取仪器仪表的示数。
12.本公开中示数视频分帧后得到示数图片,示数图片具有若干张,再在每张示数图片上生成虚拟坐标生成采样图片,通过采样图片获取识别区域,最后通过识别区域获取示数。相对于现有技术,本方案通过在示数图片上生成虚拟坐标,然后根据虚拟坐标生成采样图片,采样图片包含有虚拟坐标,根据虚拟坐标融合所有采样图片上的示数区域,此时,示数区域更加清晰,并且,虚拟坐标具有校正能力,所有采样图片在融合时参照虚拟坐标,由此提高了示数区域的清晰度、易识别性及识别精度,进而提高了读数精度。
13.作为优选,所述获取承载有仪器仪表示数信息的示数视频包括:
14.调整视频获取设备的取像单元,使所述取像单元获取最佳的取像位置;
15.开启视频获取设备并在所述取像位置完成取像以获取示数视频。
16.本方案在中特定位置获取示数视频,示数视频更加清晰,提高了示数视频的质量。
17.作为优选,所述获取承载有仪器仪表示数信息的示数图片,其中,所述示数图片包括至少两张,所述示数图片由所述示数视频生成包括:
18.确定所述取像视频的视频时间长度,其中,删除示数视频中的噪音时间长度获取视频时间长度,所述噪音时间长度包括开始时长和结束时长;
19.根据所述视频时间长度获取所述示数图片,其中,示数视频每秒至少获取两张所述示数图片。
20.本方案中,删除示数视频中的噪音时长可以提高示数视频的质量,根据示数视频的时长获得示数图片,示数图片获取方式合理,提高了示数图片的质量。
21.作为优选,所述开始时长等于结束时长;或者,所述开始时长小于结束时长;或者,开始时长大于结束时长。
22.作为优选,所述开始时长不大于1秒,所述结束时长不大于1秒。
23.本方案中,限定开始时长以及结束时长可以缩短示数视频的采集周期,提高了读数效率。
24.作为优选,所述在每张所述示数图片上生成虚拟坐标包括:
25.确定图片的中心点,所述中心点为所述示数图片长度中点连线与所述示数图片宽度中点连线的交点;
26.确定横坐标,所述横坐标过所述中心点;
27.确定纵坐标,所述纵坐标与所述横坐标垂直,并且,所述纵坐标过所述中心点。
28.本方案中虚拟坐标生成方式合理,虚拟坐标具有更高的精度。
29.作为优选,所述在每张所述示数图片上生成虚拟坐标包括:
30.确定横向辅助线,所述横向辅助线与所述横坐标平行,并且横向辅助线至少有两条;
31.确定纵向辅助线,所述纵向辅助线与所述纵坐标平行,并且,所述纵向辅助线至少有两条。
32.本方案中虚拟坐标具有多根辅助线,有利于根据虚拟坐标融合示数区域。
33.作为优选,所述获取每张采样图片上的示数区域包括:
34.确定采样图片上的数据区域,所述数据区域为包含仪器仪表示数信息的区域;
35.删除采样图片上所述数据区域以外的区域,获取识别区域。
36.本方案中删除采样图片上的无关区域,提高了读数精度。
37.作为优选,根据每张所述采样图片上的像素差获取所述示数区域。
38.作为优选,所述根据所述识别区域获取仪器仪表的示数包括:
39.根据所述识别区域的像素获取仪器仪表的示数生成示数数据;
40.上传所述示数数据至目标位置;或者,下载所述示数数据至目标位置。
41.本方案中示数数据被上传或者被下载,示数数据有利于后期应用。
42.相对于现有技术,本公开提供的基于视频图像识别算法的仪器仪表读数识别方法具有如下优点:
43.本方案通过在示数图片上生成虚拟坐标,然后根据虚拟坐标生成采样图片,采样图片包含有虚拟坐标,根据虚拟坐标融合所有采样图片上的示数区域,此时,示数区域更为
清晰,并且,虚拟坐标具有校正能力,所有采样图片在融合时参照虚拟坐标,由此提高了示数区域的清晰度、易识别性及识别精度,进而提高了读数精度。
附图说明
44.出于解释的目的,在以下附图中阐述了本公开技术的若干实施方案。以下附图被并入本文本并且构成具体实施方案的一部分。在一些情况下,以框图形式示出了熟知的结构和部件,以便避免使本公开主题技术的概念模糊。
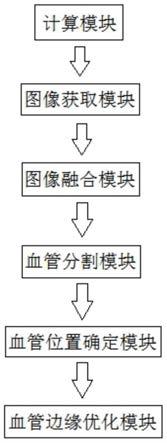
45.图1为本公开流程图。
46.图2a、图2b、图2c、图2d为不同采样图片的示意图。
47.图3为所有采样图片融合后的示意图。
具体实施方式
48.下面示出的具体实施方案旨在作为本公开主题技术的各种配置的描述,并且,不旨在表示本公开主题技术可被实践的唯一配置。具体实施方案包括具体的细节旨在提供对本公开主题技术的透彻理解。然而,对于本领域的技术人员来说将清楚和显而易见的是,本公开主题技术不限于本文示出的具体细节,并且,可在没有这些具体细节的情况下被实践。
49.参照图1所示,基于视频图像识别算法的仪器仪表读数识别方法,其特征在于,包括以下步骤:
50.s100、获取承载有仪器仪表示数信息的示数视频;
51.s200、获取承载有仪器仪表示数信息的示数图片,其中,所述示数图片包括至少两张,所述示数图片由所述示数视频生成;
52.s300、获取采样图片,其中,在每张所述示数图片上生成虚拟坐标,包含有虚拟坐标的示数图片为采样图片;
53.s400、获取识别区域,其中,获取每张采样图片上的示数区域,所述示数区域包含仪器仪表示数信息和虚拟坐标,根据所述虚拟坐标融合所有所述采样图片上的示数区域形成所述识别区域;
54.s500、获取示数,根据所述识别区域获取仪器仪表的示数。
55.本方案通过在示数图片上生成虚拟坐标,然后根据虚拟坐标生成采样图片,采样图片包含有虚拟坐标,根据虚拟坐标融合所有采样图片上的示数区域,此时,示数区域更为清晰,并且,虚拟坐标具有校正能力,所有采样图片在融合时参照虚拟坐标,由此提高了示数区域的清晰度、易识别性及识别精度,进而提高了读数精度。
56.在一些实施例中,所述获取承载有仪器仪表示数信息的示数视频包括:
57.s101、调整视频获取设备的取像单元,使所述取像单元获取最佳的取像位置;
58.s105、开启视频获取设备并在所述取像位置完成取像以获取示数视频。
59.实践中,视频获取设备通常为工业相机或其它具有取像能力的工业设设备,工业设备包括具有取像能力的智能手机等类似设备。
60.视频获取设备的取像单元一般包括镜头,镜头距离被取像特征的距离对取像清晰度具有一定影响,因此,应选取最佳位置后再进行取像操作。
61.通常取像时间并不长,可能持续若干秒,如5秒等时长。因此,在非人工取像时可以
采用支架等类似设备将视频获取设备定位在取像位置。或者,在人工取像时也可以通过手臂将视频获取设备定侠在取像位置。
62.在一些实施例中,所述获取承载有仪器仪表示数信息的示数图片,其中,所述示数图片包括至少两张,所述示数图片由所述示数视频生成包括:
63.s201、确定所述取像视频的视频时间长度,其中,删除示数视频中的噪音时间长度获取视频时间长度,所述噪音时间长度包括开始时长和结束时长;
64.s205、根据所述视频时间长度获取所述示数图片,其中,示数视频每秒至少获取两张所述示数图片。
65.所述开始时长等于结束时长;或者,所述开始时长小于结束时长;或者,开始时长大于结束时长。
66.所述开始时长不大于1秒,所述结束时长不大于1秒。
67.例如,开始时长可以为0.5秒,结束时长也可以为0.5秒。取像视频在开始或结束时长时可能会有抖动或其它干扰视频清晰度的因素,因此,去除噪音时间长度使示数图片更加清晰。
68.示数图片的获取可以采用分帧抽样法获取。示数视频逐帧提取后可以从中抽出若干张示数图片,并不需要将每帧都定义为示数图片。
69.示数视频也可以隔帧提取后从中抽出若干示数图片。
70.生成示数图片的示数视频为删除开始时长、结束时长包含的视频段后剩余的视频段。
71.参照图2a、图2b、图2c、图2d以及图3所示,在一些实施例中,所述在每张所述示数图片上生成虚拟坐标包括:
72.s301、确定图片的中心点,所述中心点为所述示数图片长度中点连线与所述示数图片宽度中点连线的交点;
73.s305、确定横坐标,所述横坐标过所述中心点;
74.s310、确定纵坐标,所述纵坐标与所述横坐标垂直,并且,所述纵坐标过所述中心点。
75.s315、确定横向辅助线,所述横向辅助线与所述横坐标平行,并且横向辅助线至少有两条;
76.s320、确定纵向辅助线,所述纵向辅助线与所述纵坐标平行,并且,所述纵向辅助线至少有两条。
77.横向辅助线、纵向辅助线的数量越多则示数图片融合后精度越高。在图片建立虚拟坐标的方法参照现有技术。具体地说,示数图片包括两条长边、两条短边,长边为示数图片的长度方向,短边为示数图片的宽度方向。
78.两条长边中点的连线获得第一线段,两条短边中点的连线获得第二线段,第一线段与第二线段相交处为虚拟坐标的中心点。
79.实践中,建立虚拟坐标主要是在每张示数图片上建立一个或一组特定点,在多张示数图片融合时,使每张示数图片上的特定点重合或以一定位置关系融合,进而提升示数图片融合过程中的融合精度。融合精度是指使多张示数图片上的特定点重合。例如,使每张示数图片上的虚拟坐标与其它示数图片上的虚拟坐标重合等。
80.基于虚拟坐标的功能,具体实施时虚拟坐标也可以采用其它方案替代。例如,点状结构的虚拟标识,或者,其它形状的虚拟标识等等。
81.在一些实施例中,所述获取每张采样图片上的示数区域包括:
82.s401、确定采样图片上的数据区域,所述数据区域为包含仪器仪表示数信息的区域;
83.s405、删除采样图片上所述数据区域以外的区域,获取识别区域。
84.根据每张所述采样图片上的像素差获取所述示数区域。
85.仪器仪表的示数区域与非示数区域具有一定的色差,该色差具体表现为像素参数的不同,或者,像素表现形式不同,例如色相等等。根据像素参数可以有效地对获得示数区域。
86.读数识别方法仅识别示数区域内的数据,提高了识别精度。
87.在一些实施例中,所述根据所述识别区域获取仪器仪表的示数包括:
88.s501、根据所述识别区域的像素获取仪器仪表的示数生成示数数据;
89.s505、上传所述示数数据至目标位置;或者,下载所述示数数据至目标位置。
90.随着物联网技术的发展,物联网的应用越来越多。示数数据被生成后可以通过通信手段使示数数据直接被应用或者直接植入目标位置,优化了识别方法的性能。
91.以上对本公开主题技术方案以及相应的细节进行了介绍,可以理解的是,以上介绍仅是本公开主题技术方案的一些实施方案,其具体实施时也可以省去部分细节。
92.另外,在以上公开的一些实施方案中,多个实施方案存在组合实施的可能,各种组合方案限于篇幅不再一一列举。本领域技术人员在具体实施时可以根据需求自由结合实施上实施方案,以获得更佳的应用体验。
93.本领域技术人员在实施本公开主题技术方案时,可以根据本公开的主题技术方案以及附图获得其它细节配置或附图,显而易见地,这些细节在不脱离本公开主题技术方案的前提下,这些细节仍属于本公开主题技术方案涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。