1.本发明涉及一种大范围浓度场测量系统,具体而言是一种基于激光诱导荧光的水体浓度场测量方法,属于环境测量领域。
背景技术:
2.激光诱导荧光(简称lif)技术是一种新的测量方法。激光诱导荧光是指荧光物质如荧光素钠,在激光的诱发下吸收特征频率的光子发出荧光,由于低浓度时荧光强度和浓度成线性关系,因此,可以通过检荧光强度达到测量浓度的目的。
3.plif技术利用激光片光照研究区域从而获得平面二维信息。激光片光一般通过半圆柱透镜将很细的激光光束扩束获得,这就给定量测量带来两个影响测量精度的问题:一是沿着激光光程方向,由于荧光物质对激光的吸收使激光强度沿程衰减,从而导致荧光强度的相应衰减;二是片光光强存在着不均匀分布,如激光tem模式为高斯分布,从而导致荧光强度的不均匀分布。
4.lif适用于大量分子和原子,用于燃烧、喷雾和各种流体机械流动研究。原子种类的lif检测也称为激光激发原子荧光(leaf)。火焰自由基和大多数燃料物可以直接使用lif进行可视化。
5.lif发射分布在许多波长(发射光谱)上,其中大部分发射从激光线发生红移。由于lif发射的这种光谱偏移,可以有效抑制杂散光或米氏散射造成的有害干扰。
6.现有技术中的lif浓度测量都是基于片光源的测量。由于片光源高斯分布特征明显,其最大测量面积一般不大于30
×
30cm。对于模型试验中大尺度的浓度场测量一直没有有效的方法。
技术实现要素:
7.本发明的目的是提出一种基于lif方法测量大范围水体中浓度场的系统,解决在污染物扩散模型试验中无法进行大范围水体同步测量的难题。
8.具体而言,本系统包含以下装置:激光光源,激光扫描单元,图像采集单元和时钟同步单元,以上三种装置通过电缆进行星形连接,其中时钟同步单元为中心节点,信号电缆分别连接激光光源、激光扫描单元和图像采集单元。作为端节点的激光光源,激光扫描单元和图像采集单元在时钟同步单元的控制下协同工作。
9.上述装置安装方式为:
10.(3)激光扫描单元发射的激光与铅垂线之间的夹角介于
±
30
°
;
11.(4)激光扫描单元垂直在测量平面上的投影位于测量范围几何中心;
12.(3)图像采集单元和激光扫描单元安装在同一高程上,并且图像采集单元和激光扫描单元的安装距离d与安装高度h之间的关系为h/d≥50;
13.发明人经过大量试验发现,当图像采集单元与激光扫描单元之间安装关系不符合上述条件时,图像采集单元将会采集到部分光柱单元,而不是从相同入射角获得的平面图
像,这样的图像无法进行浓度标定。
14.(4)激光器能量稳定性≤1%,发散角<1.5mrad;
15.发明人经过大量激光器试验发现:当激光器发散角≥1.5mrad时,造成激光在水面上形成椭圆形光斑,而即使在(2)条件能够达到时,获取的返回图像上仍由于椭圆光斑无法获得准确的浓度标定,只有当图像采集单元与激光扫描单元完全重合时才能不考虑激光器的发散角。
16.(5)激光扫描单元工作频率为:
17.发明人分别采用激光逐行扫描和激光隔行扫描,同时还使用了双激光器同步隔行扫描等方式,最终发现采用单激光器逐行扫描的工作效果最佳。
18.其具体工作方式为:
19.在一个测量周期内:激光光源在时钟同步单元的同步信号控制下精准的闪烁400~10000次,每次的闪烁时间受到同步信号的精准控制,时间控制精度为纳秒级,上述的测量周期为1~9s;
20.激光扫描单元在时钟同步单元的同步信号控制下,将激光光束逐行扫描400~10000个点位,多次重复周期的位置精度为毫米级,上述的逐行扫描为正方形区域,行数与点数相等;
21.图像采集单元在时钟同步单元的同步信号控制完成多次曝光,每次曝光记录一行图像信息,曝光时间的时钟精度为纳秒级。
22.图像的处理和标定工作方法:
23.发明人发现,在一定的浓度范围内,图像灰度值和浓度值之间呈线性关系。通过标定试验,发明人发现用一个标准浓度的溶液去标定每个激光点在该浓度下的灰度值,中心区域的灰度值大,边缘区域的灰度值小,呈现高斯分布。为了能够获得准确的灰度与浓度的关系,发明采用如下方法进行点浓度标定:
24.(1)激光行扫描灰度值与标准溶液标定
25.配置0.05ppm的标准浓度荧光素钠溶液50l,放入面积为50cm*50cm的透明亚克力水缸8内,水深20cm,与模型水深一致,根据一行上扫描的点数制备相应的水缸个数,按行放置,逐行进行采集,每行采集三个周期的图片,取三个周期内该点最大灰度值作为标准液的荧光亮度。
26.(2)浓度曲线标定
27.梯次配置标准浓度荧光素钠溶液,浓度分别为0.05ppm、0.04ppm、0.03ppm、0.02ppm、0.01ppm、0.005ppm、0.002ppm,置于透明亚克力缸内,以激光扫描单元垂直向下的投影为中心,周围1m
×
1m区域,选取两个相邻的固定点,采集60秒的图片,取激光点的平均值,使用最小二乘法拟合得到荧光素钠浓度与灰度值的关系曲线。
28.(3)将测量得到的灰度值数据与(2)步骤中得到的浓度曲线进行对比换算,得到模型上的浓度值。
29.(4)当激光扫描单元向外射出的激光与垂线之间的夹角大于15
°
小于30
°
时,对浓度值采用角度的余弦值作为校正系数,即:实际浓度=测得浓度/cos(a),其中a为上述激光与垂线之间的角度。
30.具体而言,本发明的效益如下:
31.1,本发明构造了采用激光诱导荧光方法测量大面积液体浓度分布的系统;
32.2,本发明构造的系统固件安装简单;
33.3,本发明采用激光逐行扫描的方式获得大面积离散点的浓度,提出了适用于本系统的新的灰度值与浓度关系标定方法;
34.4,本发明提出了适用于本系统的浓度校正方法。
附图说明
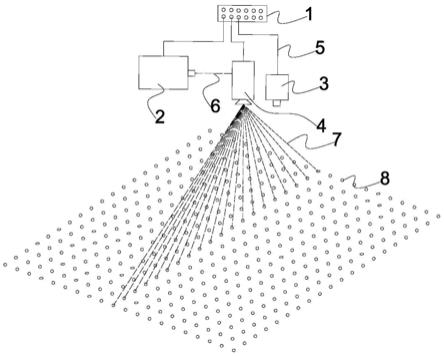
35.图1本发明实测量装置和方法示意图;
36.图2本发明标定过程中选取相邻的固定点的示意图;
37.图3本发明逐行扫描获得的数据点平面示意图;
38.图4本发明浓度标定步骤(1)结果示意图;
39.图5本发明标定步骤(2)结果曲线示意图;
40.图6本发明标定步骤(3)得到模型上的浓度值示意图;
41.图7本发明灰度测量结果示意图。
具体实施方式
42.下面结合附图对本发明作进一步描述,以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
43.实施例1
44.具体而言,本系统包含以下装置:激光光源2,激光扫描单元4,图像采集单元3和时钟同步单元1,以上四个装置通过电缆进行星形连接,其中时钟同步单元1为中心节点,信号电缆5分别连接激光光源2、激光扫描单元4和图像采集单元3。作为端节点的激光光源2,激光扫描单元4和图像采集单元3在时钟同步单元1的控制下协同工作。
45.上述装置安装方式为:
46.(1)激光扫描单元4发射的激光7与铅垂线之间的夹角介于
±
30
°
;
47.(2)激光扫描单元4垂直在测量平面上的投影位于测量范围几何中心;
48.(3)图像采集单元3和激光扫描单元4安装在同一高程上,并且图像采集单元3和激光扫描单元4的安装距离d与安装高度h之间的关系为h/d≥50;
49.(4)激光器能量稳定性≤1%,发散角<1.5mrad;
50.(5)激光扫描单元工作频率为:
51.其具体工作方式为:
52.在一个测量周期内:激光光源在时钟同步单元的同步信号控制下精准的闪烁400次,每次的闪烁时间受到同步信号的精准控制,时间控制精度为纳秒级,上述的测量周期为1s;
53.激光扫描单元在时钟同步单元的同步信号控制下,将激光光束逐行扫描400个点位,多次重复周期的位置精度为毫米级,上述的逐行扫描为正方形区域,行数与点数相等;
54.图像采集单元在时钟同步单元的同步信号控制完成多次曝光,每次曝光记录一行图像信息,曝光时间的时钟精度为纳秒级。
55.图像的处理和标定工作方法:
56.(1)激光行扫描灰度值与标准溶液标定
57.配置0.05ppm的标准浓度荧光素钠溶液50l,放入面积为50cm*50cm的透明亚克力水缸内,水深20cm,与模型水深一致,根据一行上扫描的点数制备相应的水缸个数,按行放置,逐行进行采集,每行采集三个周期的图片,取三个周期内该点最大灰度值作为标准液的荧光亮度。装置布置如图1所示,获取的各个点如图3所示。
58.(2)浓度曲线标定
59.梯次配置标准浓度荧光素钠溶液,浓度分别为0.05ppm、0.04ppm、0.03ppm、0.02ppm、0.01ppm、0.005ppm、0.002ppm,置于透明亚克力缸内,以激光扫描单元垂直向下的投影为中心,周围1m
×
1m区域,选取两个相邻的固定点,采集60秒的图片,取激光点的平均值,使用最小二乘法拟合得到荧光素钠浓度与灰度值的关系曲线。装置布置如图2所示,获得的像素与灰度关系测量结果如图4所示,拟合得到的浓度与灰度值关系如图5所示。
60.(3)灰度浓度换算
61.将测量得到的灰度值数据与(2)步骤中得到的浓度曲线进行对比换算,得到模型上的浓度值。图6为换算后的模型上的浓度值。
62.(4)浓度校正
63.当激光扫描单元向外射出的激光与垂线之间的夹角大于15
°
小于30
°
时,对浓度值采用角度的余弦值作为校正系数,即:实际浓度=测得浓度/cos(a),其中a为上述激光与垂线之间的角度。图7为经过校正后的模型浓度值。
64.实施例2
65.具体而言,本系统包含以下装置:激光光源2,激光扫描单元4,图像采集单元3和时钟同步单元1,以上四个装置通过电缆进行星形连接,其中时钟同步单元1为中心节点,信号电缆5分别连接激光光源2、激光扫描单元4和图像采集单元3。作为端节点的激光光源2,激光扫描单元4和图像采集单元3在时钟同步单元1的控制下协同工作。
66.上述装置安装方式为:
67.(3)激光扫描单元4发射的激光7与铅垂线之间的夹角介于
±
30
°
;
68.(4)激光扫描单元4垂直在测量平面上的投影位于测量范围几何中心;
69.(3)图像采集单元3和激光扫描单元4安装在同一高程上,并且图像采集单元3和激光扫描单元4的安装距离d与安装高度h之间的关系为h/d≥50;
70.(4)激光器能量稳定性≤1%,发散角<1.5mrad;
71.(5)激光扫描单元工作频率为:
72.其具体工作方式为:
73.在一个测量周期内:激光光源在时钟同步单元的同步信号控制下精准的闪烁900次,每次的闪烁时间受到同步信号的精准控制,时间控制精度为纳秒级,上述的测量周期为3s;
74.激光扫描单元在时钟同步单元的同步信号控制下,将激光光束逐行扫描900个点位,多次重复周期的位置精度为毫米级,上述的逐行扫描为正方形区域,行数与点数相等;
75.图像采集单元在时钟同步单元的同步信号控制完成多次曝光,每次曝光记录一行图像信息,曝光时间的时钟精度为纳秒级。
76.图像的处理和标定工作方法:
77.(1)激光行扫描灰度值与标准溶液标定
78.配置0.05ppm的标准浓度荧光素钠溶液50l,放入面积为50cm*50cm的透明亚克力水缸8内,水深20cm,与模型水深一致,根据一行上扫描的点数制备相应的水缸个数,按行放置,逐行进行采集,每行采集三个周期的图片,取三个周期内该点最大灰度值作为标准液的荧光亮度。装置布置如图1所示,获取的各个点如图3所示。
79.(2)浓度曲线标定
80.梯次配置标准浓度荧光素钠溶液,浓度分别为0.05ppm、0.04ppm、0.03ppm、0.02ppm、0.01ppm、0.005ppm、0.002ppm,置于透明亚克力缸内,以激光扫描单元垂直向下的投影为中心,周围1m
×
1m区域,选取两个相邻的固定点,采集60秒的图片,取激光点的平均值,使用最小二乘法拟合得到荧光素钠浓度与灰度值的关系曲线。装置布置如图2所示,获得的像素与灰度关系测量结果如图4所示,拟合得到的浓度与灰度值关系如图5所示。
81.(3)灰度浓度换算
82.将测量得到的灰度值数据与(2)步骤中得到的浓度曲线进行对比换算,得到模型上的浓度值。图6为换算后的模型上的浓度值。
83.(4)浓度校正
84.当激光扫描单元向外射出的激光与垂线之间的夹角大于15
°
小于30
°
时,对浓度值采用角度的余弦值作为校正系数,即:实际浓度=测得浓度/cos(a),其中a为上述激光与垂线之间的角度。图7为经过校正后的模型浓度值。
85.实施例3
86.具体而言,本系统包含以下装置:激光光源2,激光扫描单元4,图像采集单元3和时钟同步单元1,以上四个装置通过电缆进行星形连接,其中时钟同步单元1为中心节点,信号电缆5分别连接激光光源2、激光扫描单元4和图像采集单元3。作为端节点的激光光源2,激光扫描单元4和图像采集单元3在时钟同步单元1的控制下协同工作。
87.上述装置安装方式为:
88.(5)激光扫描单元4发射的激光7与铅垂线之间的夹角介于
±
30
°
;
89.(6)激光扫描单元4垂直在测量平面上的投影位于测量范围几何中心;
90.(3)图像采集单元3和激光扫描单元4安装在同一高程上,并且图像采集单元3和激光扫描单元4的安装距离d与安装高度h之间的关系为h/d≥50;
91.(4)激光器能量稳定性≤1%,发散角<1.5mrad;
92.(5)激光扫描单元工作频率为:
93.其具体工作方式为:
94.在一个测量周期内:激光光源在时钟同步单元的同步信号控制下精准的闪烁10000次,每次的闪烁时间受到同步信号的精准控制,时间控制精度为纳秒级,上述的测量周期为5s;
95.激光扫描单元在时钟同步单元的同步信号控制下,将激光光束逐行扫描900个点位,多次重复周期的位置精度为毫米级,上述的逐行扫描为正方形区域,行数与点数相等;
96.图像采集单元在时钟同步单元的同步信号控制完成多次曝光,每次曝光记录一行图像信息,曝光时间的时钟精度为纳秒级。
97.图像的处理和标定工作方法:
98.(1)激光行扫描灰度值与标准溶液标定
99.配置0.05ppm的标准浓度荧光素钠溶液50l,放入面积为50cm*50cm的透明亚克力水缸8内,水深20cm,与模型水深一致,根据一行上扫描的点数制备相应的水缸个数,按行放置,逐行进行采集,每行采集三个周期的图片,取三个周期内该点最大灰度值作为标准液的荧光亮度。装置布置如图1所示,获取的各个点如图3所示。
100.(2)浓度曲线标定
101.梯次配置标准浓度荧光素钠溶液,浓度分别为0.05ppm、0.04ppm、0.03ppm、0.02ppm、0.01ppm、0.005ppm、0.002ppm,置于透明亚克力缸内,以激光扫描单元垂直向下的投影为中心,周围1m
×
1m区域,选取两个相邻的固定点,采集60秒的图片,取激光点的平均值,使用最小二乘法拟合得到荧光素钠浓度与灰度值的关系曲线。装置布置如图2所示,获得的像素与灰度关系测量结果如图4所示,拟合得到的浓度与灰度值关系如图5所示。
102.(3)灰度浓度换算
103.将测量得到的灰度值数据与(2)步骤中得到的浓度曲线进行对比换算,得到模型上的浓度值。图6为换算后的模型上的浓度值。
104.(4)浓度校正
105.当激光扫描单元向外射出的激光与垂线之间的夹角大于15
°
小于30
°
时,对浓度值采用角度的余弦值作为校正系数,即:实际浓度=测得浓度/cos(a),其中a为上述激光与垂线之间的角度。图7为经过校正后的模型浓度值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。