1.本发明涉及磁粒子成像技术领域,尤其涉及一种基于永磁体旋转扫描的三维磁粒子成像设备及方法。
背景技术:
2.磁粒子成像(magnetic particle imaging,mpi)技术是一种新型成像技术,可以对检测区域内超顺磁纳米粒子的空间分布进行成像,相比于其他成像技术,其具有更为优越的灵敏度和分辨率以及较高的安全性。
3.mpi技术通过对无磁场区域内的超顺磁纳米粒子(superparamagnetic iron oxide nanoparticles,spion)施加高频的正弦磁场,使其产生非线性的磁化响应,响应过程可以通过郎之万方程进行描述,通过接收线圈可以接收到磁纳米粒子的磁响应信号,进而通过数据采集和处理,最后进行成像。
4.mpi设备中采用的无磁场区域可分为无磁场点(field free point,ffp)和无磁场线(field free line,ffl),其中,无磁场区域为ffl的设备相较于无磁场区域为ffp的设备具有较高的分辨率,且单周期内扫描范围更大,因此目前研究大多聚焦于无磁场区域为ffl的设备。目前的mpi设备大多存在成像空间较小且难以对大尺寸样本进行检测的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种基于永磁体旋转扫描的三维磁粒子成像设备及方法,用以解决mpi设备检测区域较小、难以对大尺寸样本进行检测的问题。
6.本发明提供的一种基于永磁体旋转扫描的三维磁粒子成像设备,包括:由同轴的圆筒形内壳和圆筒形外壳组成的壳体、位于所述内壳与所述外壳之间的旋转体、以及分别与所述壳体和所述旋转体固定连接的旋转位移装置;其中,
7.所述磁粒子成像检测设备的成像空间为圆柱形,所述内壳、所述外壳和所述成像空间同轴;
8.所述旋转体包括关于所述壳体的轴线对称平行设置的第一永磁体对和第二永磁体对、位于所述第一永磁体对与所述第二永磁体对之间且关于所述壳体的轴线对称平行设置的第一激励驱动线圈和第二激励驱动线圈、以及位于所述第一激励驱动线圈与所述第二激励驱动线圈之间且关于所述壳体的轴线对称平行设置的第一接收线圈和第二接收线圈;其中,所述第一永磁体对包括沿轴向并排设置的两个第一永磁体,每个第一永磁体包括层叠的n极和s极且s极在外n极在内;所述第二永磁体对包括沿轴向并排设置的两个第二永磁体,每个第二永磁体包括层叠的n极和s极且s极在外n极在内;所述旋转体关于所述壳体的径向对称,在径向的对称线与轴线的交点处产生无磁场线;所述第一激励驱动线圈与第一信号发生器连接,所述第一信号发生器用于对所述第一激励驱动线圈施加高频激励正弦电流,所述第二激励驱动线圈与第二信号发生器连接,所述第二信号发生器用于对所述第二激励驱动线圈施加高频激励正弦电流;所述第一接收线圈依次与第一陷波滤波器、第一放
大器和第一a/d转换器连接,所述第二接收线圈依次与第二陷波滤波器、第二放大器和第二a/d转换器连接,两个陷波滤波器的陷波频率与所述高频激励正弦电流的频率相同;
9.所述旋转位移装置用于带动所述旋转体在所述内壳与所述外壳之间沿轴向移动同时以轴向为中心沿周向旋转,从而带动所述无磁场线在所述成像空间内沿轴向移动同时以轴向为中心沿周向旋转,所述无磁场线的移动范围覆盖所述成像空间。
10.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述旋转位移装置,包括:与所述壳体内表面固定连接的条形轨道、在所述条形轨道上滑动的第一滑块,与所述第一滑块固定连接的圆形轨道、在所述圆形轨道上滑动且与所述旋转体固定连接的第二滑块、以及电机;其中,
11.所述电机,用于带动所述旋转体在所述内壳与所述外壳之间沿所述条形轨道移动同时沿所述圆形轨道旋转。
12.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述第一信号发生器还用于对所述第一激励驱动线圈施加低频驱动正弦电流,所述第二信号发生器还用于对所述第二激励驱动线圈施加低频驱动正弦电流,从而带动所述无磁场线在所述成像空间内沿径向的对称线方向移动。
13.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述第一永磁体对和所述第二永磁体对产生的无磁场线的长度大于或等于所述成像空间沿径向的直径。
14.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述第一接收线圈、所述第一陷波滤波器、所述第一放大器和所述第一a/d转换器之间,通过bnc接口连接;
15.所述第二接收线圈、所述第二陷波滤波器、所述第二放大器和所述第二a/d转换器之间,通过bnc接口连接。
16.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述第一陷波滤波器和所述第二陷波滤波器均为双t型陷波滤波器。
17.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述第一激励驱动线圈和所述第二激励驱动线圈,分别由绞合线制成。
18.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,所述第一接收线圈和所述第二接收线圈,分别由多圈铜线缠制而成。
19.本发明还提供了一种基于永磁体旋转扫描的三维磁粒子成像设备的使用方法,包括如下步骤:
20.s1:通过旋转位移装置将旋转体移动到无磁场线与成像空间的边缘平齐;
21.s2:利用第一信号发生器对第一激励驱动线圈施加高频激励正弦电流,利用第二信号发生器对第二激励驱动线圈施加高频激励正弦电流,使无磁场线内的磁纳米粒子产生磁响应信号;
22.s3:通过旋转位移装置带动旋转体在内壳与外壳之间沿轴向移动同时以轴向为中心沿周向旋转,从而带动无磁场线在成像空间内沿轴向移动同时以轴向为中心沿周向旋转,使无磁场线的移动范围覆盖整个成像空间;
23.s4:在无磁场线移动和旋转过程中,通过第一接收线圈和第二接收线圈实时接收
磁响应信号,磁响应信号依次经过滤波、放大和a/d转换后,输出用于成像的数字信号。
24.在一种可能的实现方式中,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备的使用方法中,步骤s2,还包括:
25.利用第一信号发生器对第一激励驱动线圈施加低频驱动正弦电流,利用第二信号发生器对第二激励驱动线圈施加低频驱动正弦电流,带动所述无磁场线在所述成像空间内沿径向的对称线方向移动。
26.本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备及方法,包括旋转体和旋转位移装置,旋转体包括两个永磁体对、两个激励驱动线圈和两个接收线圈,两个永磁体对在检测区域即成像空间产生一条水平的无磁场线,激励驱动线圈通入高频正弦与低频正弦的叠加电流,激励磁纳米粒子以及在垂直方向上移动无磁场线,接收线圈接收无磁场线移动过程中成像空间内磁纳米粒子产生的磁响应信号,经陷波滤波器和放大器后进入a/d转换器转化为数字量,可由计算机处理与成像,旋转位移装置带动旋转体旋转与移动,从而带动无磁场线在成像空间中旋转与平移,进而实现对整个成像空间的三维扫描。整个检测设备的成像空间大、电磁损耗低,检测灵敏度高,可用于大尺寸样本检测,并且,在整个检测过程中不需要移动待检测物体,使用更便捷。
附图说明
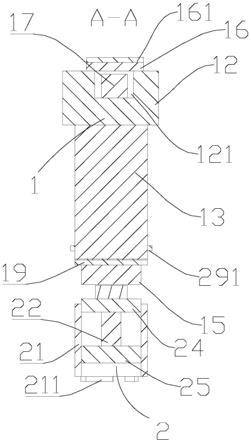
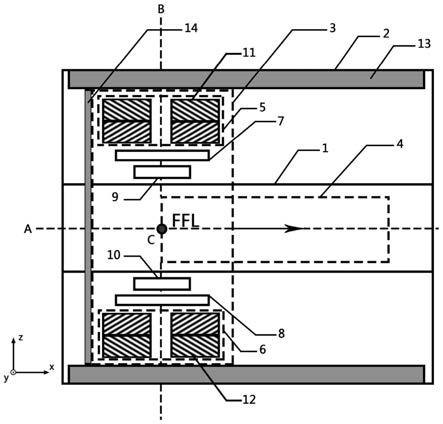
27.图1为本发明提供的一种基于永磁体旋转扫描的三维磁粒子成像设备的截面示意图;
28.图2为本发明提供的一种基于永磁体旋转扫描的三维磁粒子成像设备的使用方法的流程图。
29.附图标记说明:内壳1;外壳2;旋转体3;成像空间4;第一永磁体对5;第二永磁体对6;第一激励驱动线圈7;第二激励驱动线圈8;第一接收线圈9;第二接收线圈10;第一永磁体11;第二永磁体12;条形轨道13;圆形轨道14;轴线a;径向的对称线b;a与b的交点c。
具体实施方式
30.下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅仅是作为例示,并非用于限制本发明。
31.本发明提供的一种基于永磁体旋转扫描的三维磁粒子成像设备,如图1所示,包括:由同轴的圆筒形内壳1和圆筒形外壳2组成的壳体、位于内壳1与外壳2之间的旋转体3、以及分别与壳体和旋转体3固定连接的旋转位移装置;其中,
32.磁粒子成像检测设备的成像空间4为圆柱形,内壳1、外壳2和成像空间4同轴,轴线如图1所示的a所示;内壳1和外壳2可以实现电磁屏蔽的功能;
33.旋转体3包括关于壳体的轴线a对称平行设置的第一永磁体对5和第二永磁体对6(即第一永磁体对5和第二永磁体对6上下相对、相互平行且二者距离轴线a的距离相等)、位于第一永磁体对5与第二永磁体对6之间且关于壳体的轴线a对称平行设置的第一激励驱动线圈7和第二激励驱动线圈8(即第一激励驱动线圈7和第二激励驱动线圈8上下相对、相互平行且二者距离轴线a的距离相等)、以及位于第一激励驱动线圈7与第二激励驱动线圈8之间且关于壳体的轴线a对称平行设置的第一接收线圈9和第二接收线圈10(即第一接收线圈
9和第二接收线圈10上下相对、相互平行且二者距离轴线a的距离相等);其中,第一永磁体对5包括沿轴向(即如图1所示的x方向)并排设置的两个条形的第一永磁体11,每个第一永磁体11包括层叠的n极和s极且s极在外n极在内;第二永磁体对6包括沿轴向并排设置的两个条形的第二永磁体12,每个第二永磁体12包括层叠的n极和s极且s极在外n极在内;即两个永磁体对的n极相对,通过对称放置且相互平行的两个条形的永磁体对,产生无磁场线,第一永磁体对5和第二永磁体对6之间的距离较大,可以产生较大的成像空间4,从而解决mpi成像检测区域较小、难以对大尺寸样本进行检测的问题;选用两个永磁体对可以减小散热,产生更大的梯度场,提高磁粒子成像检测设备的分辨率;
34.旋转体3关于壳体的径向(如图1所示的z方向)对称,如图1所示,第一永磁体对5、第二永磁体对6、第一激励驱动线圈7、第二激励驱动线圈8、第一接收线圈9和第二接收线圈10关于径向的对称线b对称,在径向的对称线b与轴线a的交点c处产生一条沿如图1所示的y方向的无磁场线;第一激励驱动线圈7与第一信号发生器连接,第一信号发生器用于对第一激励驱动线圈7施加高频激励正弦电流,第二激励驱动线圈8与第二信号发生器连接,第二信号发生器用于对第二激励驱动线圈8施加高频激励正弦电流,作为磁纳米粒子的激励信号;两个接收线圈用于接收磁纳米粒子的磁响应信号,第一接收线圈9依次与第一陷波滤波器、第一放大器和第一a/d转换器连接,第二接收线圈10依次与第二陷波滤波器、第二放大器和第二a/d转换器连接,两个陷波滤波器的陷波频率与高频激励正弦电流的频率相同,这样,陷波滤波器可以滤除与激励信号同频率的信号,放大器可以实现对滤波后剩余信号的放大作用,并且,陷波滤波器中没有电感元件,可以避免对磁粒子成像检测设备的信号通路产生畸变干扰;
35.旋转位移装置用于按照指定的控制指令,带动旋转体3在内壳1与外壳2之间沿轴向移动同时以轴向为中心沿周向旋转,即带动旋转体3在内壳1与外壳2之间沿如图1所示的x方向移动同时在如图1所示的y
‑
z平面内旋转,从而带动无磁场线在成像空间4内沿轴向移动同时以轴向为中心沿周向旋转,即带动无磁场线在成像空间4内沿如图1所示的x方向移动同时在如图1所示的y
‑
z平面内旋转,从而使无磁场线的移动范围覆盖整个成像空间4,实现对整个成像空间4的三维扫描。
36.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,可以将如图1所示的旋转体3的位置设为初始位置,即旋转体3在径向的对称线b与成像空间4最左侧的边缘平齐,由于旋转体3关于径向的对称线b对称,因此,产生的无磁场线恰好位于径向的对称线b处,这样,无磁场线的初始位置为成像空间4最左侧的边缘,利用旋转位移装置带动旋转体3沿轴向从左向右移动,直至移动至成像空间4最右侧的边缘,完成对整个成像空间4的三维扫描。当然,也可以将旋转体3在径向的对称线b与成像空间4最右侧的边缘平齐作为初始位置,利用旋转位移装置带动旋转体3沿轴向从右向左移动,在此不做限定。
37.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,旋转位移装置,如图1所示,可以包括:与壳体内表面(可以是外壳内表面,或者,也可以是内壳内表面,图1以外壳内表面为例)固定连接的条形轨道13、在条形轨道13上滑动的第一滑块,与第一滑块固定连接的圆形轨道14、在圆形轨道14上滑动且与旋转体3固定连接的第二滑块、以及电机;其中,电机,用于带动旋转体3在内壳1与外壳2之间沿条形轨道13移动
同时沿圆形轨道14旋转,从而实现旋转体3在内壳1与外壳2之间沿轴向移动同时以轴向为中心沿周向旋转,即旋转体3在内壳1与外壳2之间沿如图1所示的x方向移动同时在如图1所示的y
‑
z平面内旋转,进而带动无磁场线在成像空间4内沿轴向移动同时以轴向为中心沿周向旋转,即带动无磁场线在成像空间4内沿如图1所示的x方向移动同时在如图1所示的y
‑
z平面内旋转,从而使无磁场线的移动范围覆盖整个成像空间4,实现对整个成像空间4的三维扫描。
38.需要注意的是,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,旋转体在初始位置(例如无磁场线与成像空间的最左侧边缘平齐)沿圆形轨道匀速率旋转一周,位于条形轨道上的滑块带动旋转体沿轴向移动一定距离后停下,旋转体继续沿圆形轨道旋转一周,位于条形轨道上的滑块带动旋转体沿轴向移动一定距离后停下,周而复始,直至旋转体移动到无磁场线与成像空间的最右侧边缘平齐后结束。
39.当然,旋转位移装置的结构并非局限于此,还可以为能够带动旋转体在内壳与外壳之间沿轴向移动同时以轴向为中心沿周向旋转的其他结构,在此不做限定。
40.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,为了保证无磁场线以轴向为中心沿周向旋转能够覆盖成像空间在y
‑
z平面的截面,利用利用第一信号发生器对第一激励驱动线圈施加低频驱动正弦电流,利用第二信号发生器对第二激励驱动线圈施加低频驱动正弦电流,从而可以带动无磁场线在成像空间内沿径向的对称线(如图1所示的b所示)方向(即如图1所示的z方向)移动。
41.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,除了上述利用低频驱动正弦电流带动无磁场线在成像空间内沿如图1所示的z方向移动,以实现无磁场线以轴向为中心沿周向旋转能够覆盖成像空间在y
‑
z平面的截面外,还可以通过设计第一永磁体对和第二永磁体对沿如图1所示的y方向的长度,来保证第一永磁体对和第二永磁体对产生的无磁场线的长度大于或等于成像空间沿径向的直径,从而保证无磁场线以轴向为中心沿周向旋转能够覆盖成像空间在y
‑
z平面的截面。
42.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,第一陷波滤波器和第二陷波滤波器优选双t型陷波滤波器。
43.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,第一激励驱动线圈和第二激励驱动线圈可以分别由绞合线制成。
44.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,第一接收线圈和第二接收线圈可以分别由多圈铜线缠制而成。
45.在具体实施时,在本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备中,第一接收线圈、第一陷波滤波器、第一放大器和第一a/d转换器之间可以通过bnc接口连接;第二接收线圈、第二陷波滤波器、第二放大器和第二a/d转换器之间可以通过bnc接口连接。
46.基于同一发明构思,本发明还提供了一种基于永磁体旋转扫描的三维磁粒子成像设备的使用方法,如图2所示,包括如下步骤:
47.s1:通过旋转位移装置将旋转体移动到无磁场线与成像空间的边缘平齐;
48.步骤s1是将旋转体移动至初始位置,保证无磁场线与成像空间的边缘平齐,既可以是无磁场线与成像空间的最左侧边缘平齐,如图1所示,或者,也可以是无磁场线与成像
空间的最右侧边缘平齐,在此不做限定;
49.s2:利用第一信号发生器对第一激励驱动线圈施加高频激励正弦电流,利用第二信号发生器对第二激励驱动线圈施加高频激励正弦电流,使无磁场线内的磁纳米粒子产生磁响应信号;
50.步骤s2是实现对无磁场线区域内磁纳米粒子的激励,目的是产生磁响应信号;
51.s3:通过旋转位移装置带动旋转体在内壳与外壳之间沿轴向移动同时以轴向为中心沿周向旋转,从而带动无磁场线在成像空间内沿轴向移动同时以轴向为中心沿周向旋转,使无磁场线的移动范围覆盖整个成像空间;
52.步骤s3可以实现无磁场线在成像空间内沿如图1所示的x方向移动同时沿如图1所示的y
‑
z平面旋转,使无磁场线的移动范围覆盖整个成像空间,实现无磁场线对整个成像空间的三维扫描;
53.s4:在无磁场线移动和旋转过程中,通过第一接收线圈和第二接收线圈实时接收磁响应信号,磁响应信号依次经过滤波、放大和a/d转换后,输出用于成像的数字信号;
54.滤波通过陷波滤波器来实现,滤除掉与激励信号同频的信号;放大通过放大器来实现,a/d转换通过a/d转换器来实现;输出的数字信号可以由计算机进行处理后成像。
55.在具体实施时,在执行本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备的使用方法中的步骤s2时,还可以执行如下操作:
56.利用第一信号发生器对第一激励驱动线圈施加低频驱动正弦电流,利用第二信号发生器对第二激励驱动线圈施加低频驱动正弦电流,从而带动无磁场线在成像空间内沿径向的对称线方向移动,从而保证无磁场线以轴向为中心沿周向旋转能够覆盖成像空间在y
‑
z平面的截面。
57.本发明提供的上述基于永磁体旋转扫描的三维磁粒子成像设备及方法,包括旋转体和旋转位移装置,旋转体包括两个永磁体对、两个激励驱动线圈和两个接收线圈,两个永磁体对在检测区域即成像空间产生一条水平的无磁场线,激励驱动线圈通入高频正弦与低频正弦的叠加电流,激励磁纳米粒子以及在垂直方向上移动无磁场线,接收线圈接收无磁场线移动过程中成像空间内磁纳米粒子产生的磁响应信号,经陷波滤波器和放大器后进入a/d转换器转化为数字量,可由计算机处理与成像,旋转位移装置带动旋转体旋转与移动,从而带动无磁场线在成像空间中旋转与平移,进而实现对整个成像空间的三维扫描。整个检测设备的成像空间大、电磁损耗低,检测灵敏度高,可用于大尺寸样本检测,并且,在整个检测过程中不需要移动待检测物体,使用更便捷。
58.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。