1.本发明涉及汽车技术领域,尤其涉及一种分布式驱动系统的能量回收控制方法、装置及电动汽车。
背景技术:
2.电动汽车采用动力电池作为车载能源,用电机驱动车辆行驶。电动汽车的电机一般布置在前驱动轴的中间位置或者后驱动轴的中间位置,电机连接变速箱及驱动轴,从而驱动车轮的转动。由于纯电动汽车采用动力电池组供电,电池包能量有限,为了提高电动汽车的续驶里程,电机还兼顾制动过程中的能量回收功能。
3.目前,电机在能量回收过程中,仅能对驱动轴进行能量回收,而非驱动轴无法进行能量回收,导致制动能量的回收率较低。因此,如何在整车能量源一定的情况下,提升制动能量的回收效率,以提升电动汽车的续驶里程是亟待解决的技术问题。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种分布式驱动系统的能量回收控制方法、装置及电动汽车,解决了在整车能量源一定的情况下,提升制动能量的回收效率,提升电动汽车的续驶里程的问题。
5.依据本发明的一个方面,提供了一种分布式驱动系统的能量回收控制方法,包括:
6.获取车辆当前工况需求的第一制动扭矩;
7.确定驱动系统的第二制动扭矩;其中所述第二制动扭矩为所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成的最大制动能量回收扭矩之和;
8.在所述第一制动扭矩小于或者等于所述第二制动扭矩的情况下,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生车辆当前工况需求的第一制动扭矩;
9.在所述第一制动扭矩大于所述第二制动扭矩的情况下,确定驱动系统的第三制动扭矩;其中所述第三制动扭矩为所述第一储能部件和所述第二储能部件的最大制动能量回收扭矩之和;以及根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,以产生车辆当前工况需求的第一制动扭矩;
10.其中,布置在车辆左前轮轮毂内的所述第一轮毂电机带制动器总成和右前轮轮毂内的所述第二轮毂电机带制动器总成中的轮毂电机为励磁电机,布置在车辆左后轮轮毂内的所述第三轮毂电机带制动器总成和右后轮轮毂内的所述第四轮毂电机带制动器总成中的轮毂电机为永磁电机;
11.所述第一储能部件和所述第二储能部件与第一轮毂电机带制动器总成、第二轮毂电机带制动器总成、所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成中的两个轮毂电机分别连接。
12.可选的,所述根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭
矩的分配,包括:
13.若所述第一制动扭矩小于或者等于所述第二制动扭矩与所述第三制动扭矩之和,则控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第一制动扭矩与所述第二制动扭矩的差值的制动扭矩。
14.可选的,所述根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,还包括:
15.若所述第一制动扭矩大于所述第二制动扭矩与所述第三制动扭矩之和,则确定驱动系统的第四制动扭矩;其中所述第四制动扭矩为所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成的最大制动能量回收扭矩之和;
16.根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配。
17.可选的,所述根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配,包括:
18.若所述第一制动扭矩小于或者等于第一值,则控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成产生所述第一制动扭矩与第二值的差值的制动扭矩;
19.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和;所述第二值为所述第二制动扭矩与所述第三制动扭矩之和。
20.可选的,所述根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配,包括:
21.若所述第一制动扭矩大于所述第一值,则控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成产生所述第四制动扭矩,控制液压制动系统产生所述第一制动扭矩与所述第一值的差值的制动扭矩;
22.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和。
23.依据本发明的第二个方面,提供了一种分布式驱动系统的能量回收控制装置,包括:
24.获取模块,用于获取车辆当前工况需求的第一制动扭矩;
25.第一确定模块,用于确定驱动系统的第二制动扭矩;其中所述第二制动扭矩为所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成的最大制动能量回收扭矩之和;
26.第一控制模块,用于在所述第一制动扭矩小于或者等于所述第二制动扭矩的情况下,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生车辆当前工况需求的第一制动扭矩;
27.处理模块,用于在所述第一制动扭矩大于所述第二制动扭矩的情况下,确定驱动
系统的第三制动扭矩;其中所述第三制动扭矩为所述第一储能部件和所述第二储能部件的最大制动能量回收扭矩之和;以及根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,以产生车辆当前工况需求的第一制动扭矩;
28.其中,布置在车辆左前轮轮毂内的所述第一轮毂电机带制动器总成和右前轮轮毂内的所述第二轮毂电机带制动器总成中的轮毂电机为励磁电机,布置在车辆左后轮轮毂内的所述第三轮毂电机带制动器总成和右后轮轮毂内的所述第四轮毂电机带制动器总成中的轮毂电机为永磁电机;
29.所述第一储能部件和所述第二储能部件与第一轮毂电机带制动器总成、第二轮毂电机带制动器总成、所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成中的两个轮毂电机分别连接。
30.可选的,所述处理模块包括:
31.第一控制子模块,用于在所述第一制动扭矩小于或者等于所述第二制动扭矩与所述第三制动扭矩之和时,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第一制动扭矩与所述第二制动扭矩的差值的制动扭矩。
32.可选的,所述处理模块还包括:
33.第一确定子模块,用于在所述第一制动扭矩大于所述第二制动扭矩与所述第三制动扭矩之和时,确定驱动系统的第四制动扭矩;其中所述第四制动扭矩为所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成的最大制动能量回收扭矩之和;
34.第二控制子模块,用于根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配。
35.可选的,所述第二控制子模块包括:
36.第一控制单元,用于在所述第一制动扭矩小于或者等于第一值时,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成产生所述第一制动扭矩与第二值的差值的制动扭矩;
37.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和;所述第二值为所述第二制动扭矩与所述第三制动扭矩之和。
38.可选的,所述第二控制子模块还包括:
39.第二控制单元,用于在所述第一制动扭矩大于所述第一值时,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成产生所述第四制动扭矩,控制液压制动系统产生所述第一制动扭矩与所述第一值的差值的制动扭矩;
40.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和。
41.依据本发明的第三个方面,提供了一种电动汽车,所述电动汽车包括存储器、控制器、存储在所述存储器上并能够在所述控制器上运行的计算机程序,所述控制器执行所述
计算机程序时实现如上所述的分布式驱动系统的能量回收控制方法的步骤。
42.本发明的实施例的有益效果是:
43.上述方案中,第一轮毂电机带制动器总成和第二轮毂电机带制动器总成中的轮毂电机为励磁电机,第三轮毂电机带制动器总成和第四轮毂电机带制动器总成中的轮毂电机为永磁电机,且轮毂电机带制动器总成上连接有第一储能部件和第二储能部件。方案通过获取车辆当前工况需求的第一制动扭矩;并确定驱动系统的第二制动扭矩;其中所述第二制动扭矩为所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成的最大制动能量回收扭矩之和;实现在所述第一制动扭矩小于或者等于所述第二制动扭矩的情况下,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生车辆当前工况需求的第一制动扭矩;在所述第一制动扭矩大于所述第二制动扭矩的情况下,确定驱动系统的第三制动扭矩;其中所述第三制动扭矩为所述第一储能部件和所述第二储能部件的最大制动能量回收扭矩之和;以及根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,产生车辆当前工况需求的第一制动扭矩。实现了提升制动能量的回收效率,提升了电动汽车的续驶里程。
附图说明
44.图1表示本发明实施例的分布式驱动系统的结构示意图;
45.图2表示本发明实施例的制动系统的结构示意图;
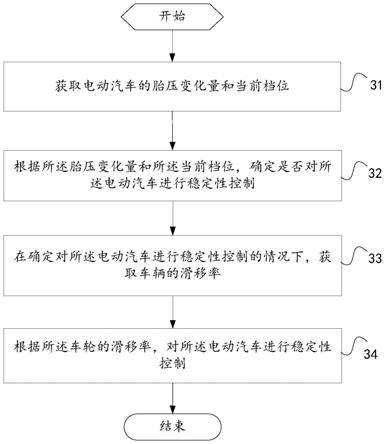
46.图3表示本发明实施例的分布式驱动系统的能量回收控制方法的流程图之一;
47.图4表示本发明实施例的分布式驱动系统的故障检测的流程图;
48.图5表示本发明实施例的分布式驱动系统的能量回收控制方法的流程图之二;
49.图6表示本发明实施例的分布式驱动系统的能量回收控制装置的结构框图。
具体实施方式
50.下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
51.如图1中,本发明提供一种分布式驱动系统包括:布置在电动汽车的左前轮轮毂内的第一轮毂电机带制动器总成11;布置在右前轮轮毂内的第二轮毂电机带制动器总成12;布置在左后轮轮毂内的第三轮毂电机带制动器总成13;布置在右后轮轮毂内的第四轮毂电机带制动器总成14。
52.所述第一储能部件和所述第二储能部件与第一轮毂电机带制动器总成11、第二轮毂电机带制动器总成12、所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14中的两个轮毂电机分别连接。
53.具体的,所述第一轮毂电机带制动器总成11上连接有第一储能部件,所述第二轮毂电机带制动器总成12上连接有第二储能部件;
54.所述第一轮毂电机带制动器总成11和所述第二轮毂电机带制动器总成12中的轮毂电机为励磁电机,所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成
14中的轮毂电机为永磁电机。
55.控制器,所述控制器分别与所述第一轮毂电机带制动器总成11、所述第二轮毂电机带制动器总成12、所述第三轮毂电机带制动器总成13、所述第四轮毂电机带制动器总成14以及所述第一储能部件和所述第二储能部件连接。
56.需要指出,上述结构中的车轮制动器与轮毂电机相匹配,制动的工作原理保持不变。与现有技术不同的是,电机的布置位置发生改变,由原来的轴上(前轴或者后轴中间位置)变更为轮毂电机,从而实现由原来的集中式驱动改为分布式驱动。而通过采用分布式的轮毂电机,将轮毂电机带制动器总成布置在车轮端的轮毂内,取消了驱动轴和变速箱,能够减轻零部件数量和整车的重量,并且采用分布式轮毂电机直接驱动车轮,使电动汽车的驱动方式更加灵活,如在低速行驶路段,可仅使用两个后轮作为驱动轮,两个前轮作为从动轮跟随,这样即可降低驱动能量的消耗,有利于提高整车续驶里程;另一方面采用分布式轮毂电机直接驱动车轮,能够缩短了驱动链路,提高传动效率,实现制动能量回收由原来的集中式的电机变更为单个车轮上的轮毂电机,使制动能量回收转化更加直接和快捷。进一步的,增加的第一储能部件和第二储能部件,能够实现在车辆处于制动能量回收状态时,将制动能量回收的能量进行存储,用于提供驱动力,以增大对整车制动能量回收的程度,提高了制动能量回收效率。
57.如图1和2中,在一可选实施例中,控制器为整车控制器10(vehicle control unit,简称vcu)。
58.进一步的,如图2所示,其示出的是一种电动汽车的制动系统结构示意图,其中,制动系统结构包括上述分布式驱动系统,还包括:
59.电子稳定控制模块5,所述电子稳定控制模块5通过制动管路分别与所述第一轮毂电机带制动器总成11、所述第二轮毂电机带制动器总成12、所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14连接;
60.布置在左前轮(lf)上的第一轮速传感器61;布置在右前轮(rf)上的第二轮速传感器62;布置在左后轮(lr)上的第三轮速传感器63;布置在右后轮(rr)上的第四轮速传感器64;所述第一轮速传感器61、第二轮速传感器62、第三轮速传感器63和第四轮速传感器64分别通过硬线与所述电子稳定控制模块5相连接,实现将采集的轮速信号传递到电子稳定控制模块5。
61.电控助力器带制动总泵7,所述电控助力器带制动总泵7通过硬线与所述整车控制器10相连接,并通过制动管路与所述电子稳定控制模块5相连接,相比于真空助力器,电控助力器能够更精准的对液压制动过程进行控制,有利于提高控制精度。
62.制动踏板8和油门踏板9通过螺栓固定在车身驾驶舱前围板周边,制动踏板8上的位移传感器81通过螺栓固定在制动踏板上,用于反馈制动踏板8的形程变化,以反映驾驶员的制动意图。电控助力器带制动总泵7通过螺栓与制动踏板8连接。制动踏板8上连接的位移传感器81和油门踏板9上连接的角度传感器用于采集油门踏板信号和制动踏板信号,并将采集的信号反馈至整车控制器10。
63.方向盘15上安装有转角传感器,转角传感器通过转向管柱与方向盘15连接,实现当方向盘15转动时,带动转向管柱的转动,通过转角传感器输出方向盘的转角测量信号,转角传感器与整车控制器10电连接,实现将方向盘的转角测量信号输入给整车控制器10。
64.如图3所示,本发明的实施例提供了一种分布式驱动系统的能量回收控制方法,方法包括:
65.步骤31,获取车辆当前工况需求的第一制动扭矩;
66.其中,驾驶员施加作用力在制动踏板8上,位移传感器81采集踏板行程信号并将采集的踏板行程信号输入到控制器(可以为整车控制器10)中,通过控制器对踏板行程信号进行解释,获得驾驶员期望的制动力矩需求tb1,即车辆当前工况需求的第一制动扭矩。
67.步骤32,确定驱动系统的第二制动扭矩;其中所述第二制动扭矩为所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14的最大制动能量回收扭矩之和;
68.步骤33,在所述第一制动扭矩小于或者等于所述第二制动扭矩的情况下,控制所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14产生车辆当前工况需求的第一制动扭矩;
69.其中,控制器在获得需求的第一制动扭矩后,优先确定两个后轮对应的第二制动扭矩是否满足需求。在第二制动扭矩满足制动需求(第一制动扭矩小于或者等于第二制动扭矩)时,则优先让两个后轮提供制动力。由于两个后轮的轮毂电机采用永磁同步电机,两个前轮的轮毂电机采用异步电机(励磁电机),相对于采用永磁同步电机而言,异步轮毂电机在当从动轮角色中行驶阻力比较低,因此,优先利用两个后轮提供制动力,有利于降低整车行驶的能量消耗,从而提高电动汽车的续驶里程。
70.步骤34,在所述第一制动扭矩大于所述第二制动扭矩的情况下,确定驱动系统的第三制动扭矩;其中所述第三制动扭矩为所述第一储能部件和所述第二储能部件的最大制动能量回收扭矩之和;以及根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,以产生车辆当前工况需求的第一制动扭矩。
71.其中,在两个后轮的第二制动扭矩不满足制动需求(第一制动扭矩大于第二制动扭矩)时,进一步确定第一储能部件和第二储能部件对应的第三制动扭矩,以实现在第二制动扭矩的基础上结合第三制动扭矩,对制动扭矩进行分配控制。其中,第一储能部件和第二储能部件能够将回收的能量进行储存,用于提供驱动力,以增大对整车制动能量回收的程度,提供整车行驶的能量消耗,有效的提高了制动能量回收效率,提升了整车的续驶里程。
72.上述实施例中,在获取车辆当前工况需求的第一制动扭矩后,优先使用轮毂电机为永磁电机的两个后轮,使得轮毂电机为励磁电机的两个前轮作为从动轮,能够降低能量的消耗;而在两个后轮不足以提供需求制动力时,进一步结合第一储能部件和第二储能部件能够回收的第三制动扭矩,对制动扭矩进行分配,有效提高了制动能量回收的效率,提升了整车的续驶里程。
73.进一步的,上述步骤31之前,还包括:
74.在车辆上电后,进行系统故障检测。
75.具体的,图4中示出了故障检测的流程示意图。在完成并通过检测后,车辆进入准备就绪及行车模式。如图4中,检测流程包括:
76.步骤41,车辆上电;
77.步骤42,进行系统自检;
78.步骤43、判断系统是否有异常现象发生,如果判断系统正常,则进行步骤44;若判断系统不正常,则进行步骤46;
79.步骤44,分别判断油门踏板信号和制动踏板信号是否正常,若判断油门踏板信号和制动踏板信号均正常,则进一步的,在判断油门踏板信号和制动踏板信号有变化的信号时,进行步骤45;若判断油门踏板信号、制动踏板信号及挡位信号中有一个或者多个不正常,则判断发生系统故障,进行步骤46;
80.步骤45,进入行车模式;
81.步骤46,进行报警提示并点亮报警灯,退出程序。
82.该实施例中,在对电动汽车进行制动能量回收控制之前,进行系统故障检测,有效保证了后续获取的油门踏板信号和制动踏板信号的精确度,有利于提升能量回收控制的精确度。
83.进一步的,步骤34中,根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,包括以下两种情况:
84.情况一:
85.若所述第一制动扭矩小于或者等于所述第二制动扭矩与所述第三制动扭矩之和,则控制所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第一制动扭矩与所述第二制动扭矩的差值的制动扭矩。
86.该实施例中,在第一制动扭矩小于或者等于第二制动扭矩与第三制动扭矩之和时,利用两个后轮提供第二制动扭矩,剩余制动扭矩(第一制动扭矩与第二制动扭矩之差)由第一储能部件和所述第二储能部件进行回收产生,降低了动力电池包的能量消耗,并增加能量回收的效率,实现整车的续驶里程的提升。
87.情况二:
88.若所述第一制动扭矩大于所述第二制动扭矩与所述第三制动扭矩之和,则确定驱动系统的第四制动扭矩;其中所述第四制动扭矩为所述第一轮毂电机带制动器总成11和所述第二轮毂电机带制动器总成12的最大制动能量回收扭矩之和;
89.根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配。
90.该实施例中,如果当前工况需求的制动扭矩较大,两个后轮及第一储能部件和第二储能部件不能满足制动需求时,则进一步确定第一轮毂电机带制动器总成11和第二轮毂电机带制动器总成12对应的第四制动扭矩,以根据第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配。该实施例在当前工况需求的制动扭矩较大时,控制两个前轮参与制动能量回收,并根据两个前轮的回收能力进行制动力的分配,实现了灵活的能量回收控制策略,同时提高了能量回收效率,保证了制动需求。
91.在本发明一可选实施例中,根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配,包括以下两种情况:
92.情况a:
93.若所述第一制动扭矩小于或者等于第一值,则控制所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成11和所述第二轮毂电机带制动器总成12产生所述第一制动扭矩与第二值的差值的制动扭矩;
94.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和;所述第二值为所述第二制动扭矩与所述第三制动扭矩之和。
95.情况b:
96.若所述第一制动扭矩大于所述第一值,则控制所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成11和所述第二轮毂电机带制动器总成12产生所述第四制动扭矩,控制液压制动系统产生所述第一制动扭矩与所述第一值的差值的制动扭矩;
97.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和。
98.上述实施例中,在四个轮毂电机与第一储能部件和所述第二储能部件能够满足需求的第一制动力时,控制两个后轮与第一储能部件和所述第二储能部件按照最大回收能量提供制动扭矩,剩余制动扭矩由两个前轮提供。能够有效的提高能量回收效率,从而提高整车的续驶里程。在四个轮毂电机与第一储能部件和所述第二储能部件能够不满足需求的第一制动力时,控制四个轮毂电机轮与第一储能部件和所述第二储能部件按照最大回收能量提供制动扭矩,同时控制液压系统补足所需的剩余制动扭矩。该实施例中的第一储能部件和所述第二储能部件以最大回收能量提供制动扭矩,能够有效的提高能量回收效率,从而提高整车的续驶里程。
99.如图1和图2所示,在本发明一可选实施例中,所述第一储能部件包括:第一弹性储能器21,所述第一弹性储能器21通过第一传动轴41与所述第一轮毂电机带制动器总成11连接;以及用于切换所述第一弹性储能器21的工作状态的第一电磁离合器31,所述第一电磁离合器31设置于所述第一传动轴41之间,且与所述整车控制器10连接(图2中未示出第一电磁离合器31与整车控制器10的连接关系)。所述第二储能部件包括:第二弹性储能器22,所述第二弹性储能器22通过第二传动轴42与所述第二轮毂电机带制动器总成12连接;以及用于切换所述第二弹性储能器22的工作状态的第二电磁离合器32,所述第二电磁离合器32设置于所述第二传动轴42之间,且与所述整车控制器10连接(图2中未示出第二电磁离合器32与整车控制器10的连接关系)。控制所述第一储能部件和所述第二储能部件产生制动扭矩的过程可以包括:
100.控制所述第一电磁离合器31吸和所述第一传动轴41,以使所述第一弹性储能器21与所述第一轮毂电机带制动器总成11之间导通;控制所述第二电磁离合器32吸和所述第二传动轴42,以使所述第二弹性储能器22与所述第二轮毂电机带制动器总成12之间导通,实现弹性储能器将动能转化为弹性是能进行存储,从而增大能量回收程度。在有驱动需求时再将弹性势能转换为驱动力,有效的提高能量回收效率,降低了动力电池包的能量消耗,从而有利于增加整车的续驶里程。
101.需要说明的是,弹性储能器所提供的储能需求,无法及时转换为电能,只能在制动结束后,通过释放直接转换为驱动力矩,推动整车的前进。如果车辆在制动过程中,直到车辆停止,通过判断车辆不再继续行驶或者超过某一时间间隔车辆没有速度和位移信号产生,则控制离合器断开传动轴,以及时释放在弹性储能器中所存储的能量,以保护储能器中弹性元件。
102.下面结合附图5,对分布式驱动系统的能量回收控制方法进行介绍。制动能量回收控制的流程可以包括:
103.步骤51,获取制动踏板行程信号;
104.当整车通过自检查各系统正常,整车进入ready状态,制动踏板信号正常,驾驶员通过脚作用在制动踏板上,踏板行程信号通过位移传感器81采集并被输入到相关控制器中。
105.步骤52,获取到驾驶员的期望制动力矩需求tb1;
106.通过控制器对该踏板行程信号的解释,可获得一个驾驶员期望的制动力矩需求如tb1(第一制动扭矩)。其中,车辆在行驶过程中,由驱动控制器选择那些车轮提供驾驶员需求的驱动力矩。
107.步骤53,判断后轮的两个轮毂电机回收扭矩tb2是否满足tb2-tb1≥0;
108.首先考虑正在工作的驱动轮(如当前正在驱动的是两个后轮毂电机),能否有足够能能量回收能力,满足电机能量回收所产生的制动力矩tb2比tb1大,如果是,则进行步骤54;如果通过计算,两个后轮毂电机的最大回收能力tb2都不能满足驾驶员的制动需求tb1,则进行步骤55;
109.步骤54,驾驶员所期望的制动力矩tb1由两个后轮毂电机来承担,每个后面的轮毂电机分别承担的制动力矩,以便产生尽可能多的制动能量回收。
110.步骤55,判断前轮的第一弹性储能器21和第二弹性储能器22是否满足tb1-tb2-tb3≤0;
111.两个后轮毂电机按照最大的制动力矩进行分配,并进行与非逻辑判断,判断tb1与tb2的差额由前轮电机上的第一弹性储能器21和第二弹性储能器22来进行补偿是否可以满足制动要求;如果前轮的第一弹性储能器21和第二弹性储能器22的储能力矩tb3,能够满足tb1与tb2的差额要求,则进行步骤56;如果驾驶员所需求的制动力矩特别的大,两个后轮毂电机所能回收的制动能量力矩tb2及前轮的储能器tb3之和还不能满足tb1的需求,则进行步骤57;
112.步骤56,tb与tb2的制动力矩差额由tb3来进行承担,即,控制第一弹性储能器21和第二弹性储能器22进行储能工作,提供tb1-tb2的能量储藏功能,分别通过控制两个前轮毂电机上的电磁离合器接通,吸收tb1
–
tb2能量差值,前面两个弹性储能器分别储能
113.步骤57,前轮轮毂电机通电,进行制动能量回收,提供制动扭矩tb4;
114.步骤58,判断两个前轮轮毂电机的制动力矩tb4是否满足tb1-tb2-tb3-tb4≤0;若满足,则通过启动两个前轮毂电机进行工作,提供tb4=tb1-tb2-tb3的制动能量力矩,每个前轮毂电机分别承担的制动扭矩为若不满足,则进行步骤59;
115.步骤59,控制液压系统提供液压制动力矩tb5=tb1-tb2-tb3-tb4;
116.如果tb1再进一步增大,则差额由液压制动系统来承担提供,即由液压系统进行补偿其差额。该差额由电控助力器带制动总泵7控制轮毂电机,推动液压制动总泵输出相应大小的液压力值,保证所产生的液压制动力矩能够满足tb1-tb2-tb3-tb4。
117.上述实施例中,优先考虑了两个后轮轮毂电机进行制动能量回收,将动能转换为
电能存储起来,在两个后轮不满足需求时,考虑同时控制弹性储能器将动能转换为弹性势能进行储存,进一步,在需要时同时控制两个前轮轮毂电机参与制动能量回收,最后在需求制动力较大、驱动系统不足以满足制动需求时,通过控制液压系统提供液压制动力进行补全,以满足整车驾驶员的制动需求的第一制动扭矩。该方案实现了不同工况需求下的制动能量回收控制策略,在保证制动需求的同时,能够有效的提升能量回收效率,提升整车的续驶里程。
118.相应于上述方法实施例,本发明实施例还提供一种分布式驱动系统的能量回收控制装置。
119.如图6中,其示出的是一种分布式驱动系统的能量回收控制装置的结构框图。装置600,应用于控制器,包括:
120.获取模块601,用于获取车辆当前工况需求的第一制动扭矩;
121.第一确定模块602,用于确定驱动系统的第二制动扭矩;其中所述第二制动扭矩为所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成的最大制动能量回收扭矩之和;
122.第一控制模块603,用于在所述第一制动扭矩小于或者等于所述第二制动扭矩的情况下,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生车辆当前工况需求的第一制动扭矩;
123.处理模块604,用于在所述第一制动扭矩大于所述第二制动扭矩的情况下,确定驱动系统的第三制动扭矩;其中所述第三制动扭矩为所述第一储能部件和所述第二储能部件的最大制动能量回收扭矩之和;以及根据所述第二制动扭矩和所述第三制动扭矩,控制车辆进行制动扭矩的分配,以产生车辆当前工况需求的第一制动扭矩;
124.其中,布置在车辆左前轮轮毂内的所述第一轮毂电机带制动器总成11和右前轮轮毂内的所述第二轮毂电机带制动器总成12中的轮毂电机为励磁电机,布置在车辆左后轮轮毂内的所述第三轮毂电机带制动器总成13和右后轮轮毂内的所述第四轮毂电机带制动器总成14中的轮毂电机为永磁电机;
125.所述第一储能部件和所述第二储能部件与第一轮毂电机带制动器总成11、第二轮毂电机带制动器总成12、所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14中的两个轮毂电机分别连接。
126.可选的,所述处理模块604还包括:
127.第一控制子模块,用于在所述第一制动扭矩小于或者等于所述第二制动扭矩与所述第三制动扭矩之和时,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第一制动扭矩与所述第二制动扭矩的差值的制动扭矩。
128.可选的,所述处理模块604还包括:
129.第一确定子模块,用于在所述第一制动扭矩大于所述第二制动扭矩与所述第三制动扭矩之和时,确定驱动系统的第四制动扭矩;其中所述第四制动扭矩为所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成的最大制动能量回收扭矩之和;
130.第二控制子模块,用于根据所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩,控制车辆进行制动扭矩的分配。
131.可选的,所述第二控制子模块包括:
132.第一控制单元,用于在所述第一制动扭矩小于或者等于第一值时,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成产生所述第一制动扭矩与第二值的差值的制动扭矩;
133.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和;所述第二值为所述第二制动扭矩与所述第三制动扭矩之和。
134.可选的,所述第二控制子模块还包括:
135.第二控制单元,用于在所述第一制动扭矩大于所述第一值时,控制所述第三轮毂电机带制动器总成和所述第四轮毂电机带制动器总成产生所述第二制动扭矩,控制所述第一储能部件和所述第二储能部件产生所述第三制动扭矩,控制所述第一轮毂电机带制动器总成和所述第二轮毂电机带制动器总成产生所述第四制动扭矩,控制液压制动系统产生所述第一制动扭矩与所述第一值的差值的制动扭矩;
136.其中,所述第一值为所述第二制动扭矩、所述第三制动扭矩和所述第四制动扭矩之和。
137.该装置是与上述方法实施例对应的装置,上述方法实施例中的所有实现方式均适用于该装置的实施例中,也能达到与方法实施例相同的技术效果。
138.此外,本发明还提供了一种电动汽车,所述电动汽车包括:存储器、控制器、存储在所述存储器上并能够在所述控制器上运行的计算机程序,所述控制器执行所述计算机程序时实现如上所述的分布式驱动系统的制动能量回收的控制方法的步骤。
139.具体的,电动汽车包括:布置在左前轮轮毂内的第一轮毂电机带制动器总成11,布置在右前轮轮毂内的第二轮毂电机带制动器总成12,布置在左后轮轮毂内的第三轮毂电机带制动器总成13和布置在右后轮轮毂内的第四轮毂电机带制动器总成14;所述第一轮毂电机带制动器总成11上连接有第一储能部件,所述第二轮毂电机带制动器总成12上连接有第二储能部件;所述第一轮毂电机带制动器总成11和所述第二轮毂电机带制动器总成12中的轮毂电机为励磁电机,所述第三轮毂电机带制动器总成13和所述第四轮毂电机带制动器总成14中的轮毂电机为永磁电机,且所述控制器分别与所述第一轮毂电机带制动器总成11、所述第二轮毂电机带制动器总成12、所述第三轮毂电机带制动器总成13、所述第四轮毂电机带制动器总成14以及所述第一储能部件和所述第二储能部件连接。
140.上述方案中,采用轮毂电机的布置形式,并将两个后轮的轮毂电机采用永磁同步电机,两个前轮的轮毂电机采用异步电机(励磁电机),实现在后轮驱动前轮从动时,能够有效的降低驱动能量消耗,提高轮毂电机的工作效率,从而增加电动汽车的续航里程。通过增加电磁离合器及弹性储能器,增加了电动汽车能量回收的方式和途径,实现在驱动力矩选择方式及控制方面更加灵活,实现了不同工况需求下的多种制动能量回收方式,对增大电池的续航里程有重要作用。
141.以上所述的是本发明的优选实施方式,应当指出对于本技术领域的普通人员来说,在不脱离本发明所述的原理前提下还可以作出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。