1.本发明属于自动驾驶泊车技术领域,尤其涉及一种用于电动车自动停泊和充换电的自动驾驶方法。
背景技术:
2.自主泊车系统是一种用于解决车辆从停车场入口到停车位之间的车辆自动驾驶的问题。传统的自主泊车系统建立停车场高精地图,以车载运算单元以及车载的传感器实现环境感知、路径避障、车位搜寻,从而实现自动巡航泊车。自主泊车中的实时定位系统一般采用车载传感器,如环视相机、前视相机、毫米波雷达等,通过传感器提取的信息跟高精地图进行比对,实现对于车辆在高精地图中的定位。
3.电动汽车在使用过程中需要频繁的充电,而这个过程一般需要持续一段时间,导致司机必须呆在车附近不能远离,从而在充完电时能立即驶离充电桩,提高充电桩的使用效率,否则需要建设大量的充电桩才能满足日益增长的电动车的需求。电动汽车另外一种补充电能的方式就是换电。换电站是另外一种类型的充电站,此站内,需要先把电动汽车开到换电的工位上,然后完成换电动作。这个操作的难度在于准确安全地把电动汽车开到换电工位上异常困难。充换电都涉及到如果有大量用户等待的话,需要司机关注整个过往,并及时驶入驶出。
技术实现要素:
4.本发明实施例提供一种用于电动车自动停泊和充换电的自动驾驶方法,旨在解决背景技术中提出的问题。
5.本发明实施例是这样实现的,一种用于电动车自动停泊和充换电的自动驾驶方法,该自动驾驶方法包括如下步骤:
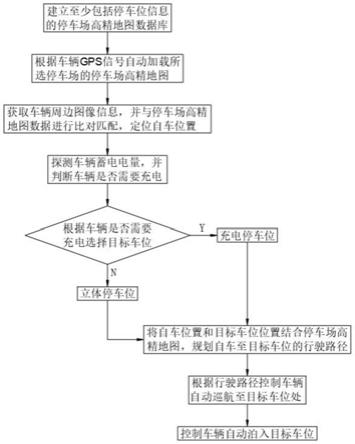
6.s1、建立至少包括停车位信息的停车场高精地图数据库;
7.s2、根据车辆gps信号自动加载所选停车场的停车场高精地图;
8.s3、获取车辆周边图像信息,并与停车场高精地图数据进行比对匹配,定位自车位置;
9.s4、探测车辆蓄电电量,并判断车辆是否需要充电;
10.s5、根据车辆是否需要充电选择目标车位,若是则选择充电停车位,否则选择立体停车位;
11.s6、将自车位置和目标车位位置结合停车场高精地图,规划自车至目标车位的行驶路径;
12.s7、根据行驶路径控制车辆自动巡航至目标车位处;
13.s8、控制车辆自动泊入目标车位。
14.优选的,所述停车场高精地图在人工驾驶状态下建立,包括如下步骤:
15.s11、获取车辆gps信号自动加载停车场原始地图;
16.s11、获取车辆的超声信号、can信号以及车辆周边图像信号;
17.s12、获取车辆can信号,提取图像信息中每帧车辆位姿;
18.s13、通过基于深度学习的语义算法分割图像信号,对车辆周边的路面进行标识分类;
19.s14、通过标定的相机模型将图像信号上的标识还原至车辆坐标系下,结合车辆位姿对所述标识进行补偿和跟踪;
20.s15、通过地图优化算法将补偿和跟踪处理的标识转化为与停车场原始地图语义信息一致的路径轨迹;
21.s16、将路径轨迹与停车位类型结合在停车场原始地图内进行区域划分;
22.s17、根据路径轨迹和障碍物信息进行采样生成道路节点;
23.s18、将路径轨迹、停车位区域和道路节点结合生成地图信息;
24.s19、将地图信息与停车场原始地图融合更新生成停车场高精地图。
25.优选的,所述车辆位姿通过从can信号内获取车辆轮速脉冲、方向盘和挡位信号,并将车辆轮速脉冲、方向盘和挡位信号与车辆运动力学模型结合,输出图像信息中每帧车辆位姿;
26.优选的,所述标识至少包括停车位信息、车道线信息、障碍物信息、减速带信息、路障信息以及地锁开关信息。
27.优选的,所述停车位信息至少包括停车位的位置、类型以及状态。
28.优选的,所述停车位的类型至少包括充电停车位以及立体停车位。
29.优选的,所述自动巡航和所述自动泊入车位时,实时获取车辆周边图像信号,识别车辆周边障碍物,进行自主避障。
30.该自动驾驶的方法通过车载传感器和停车场高精地图,通过获取车辆电量判断车辆是否需要充电,据此选择目标车位,可有效的控制车辆完成自动停泊和充换电的停泊转换,方便车辆精确泊车的同时,无需驾驶人员等候,比那与电动车充换电。
附图说明
31.图1是一种用于电动车自动停泊和充换电的自动驾驶方法的自动驾驶流程图;
32.图2是一种用于电动车自动停泊和充换电的自动驾驶方法中停车场高精地图的建立流程图。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
34.本发明提供一种用于电动车自动停泊和充换电的自动驾驶方法,如图1所示,该自动驾驶方法包括如下步骤:
35.s1、建立至少包括停车位信息的停车场高精地图数据库;
36.其中,所述停车场高精地图在人工驾驶状态下建立,如图2所示,包括如下步骤:
37.s11、获取车辆gps信号自动加载停车场原始地图;
38.s11、获取车辆的超声信号、can信号以及车辆周边图像信号;
39.s12、从can信号内获取车辆轮速脉冲、方向盘和挡位信号,并将车辆轮速脉冲、方向盘和挡位信号与车辆运动力学模型结合,输出图像信息中每帧车辆位姿;
40.s13、通过基于深度学习的语义算法分割图像信号,对车辆周边的路面进行标识分类;
41.s14、通过标定的相机模型将图像信号上的标识还原至车辆坐标系下,结合车辆位姿对所述标识进行补偿和跟踪;
42.其中,所述标识至少包括停车位信息、车道线信息、障碍物信息、减速带信息、路障信息以及地锁开关信息;
43.所述停车位信息至少包括停车位的位置、类型以及状态;
44.所述停车位的类型至少包括充电停车位以及立体停车位;
45.s15、通过地图优化算法将补偿和跟踪处理的标识转化为与停车场原始地图语义信息一致的路径轨迹;
46.s16、将路径轨迹与停车位类型结合在停车场原始地图内进行区域划分;
47.s17、根据路径轨迹和障碍物信息进行采样生成道路节点;
48.s18、将路径轨迹、停车位区域和道路节点结合生成地图信息;
49.s19、将地图信息与停车场原始地图融合更新生成停车场高精地图。
50.执行上述步骤生成至少包括停车位的区域、位置、类型和状态信息的停车场高精地图。
51.s2、根据车辆gps信号自动加载所选停车场的停车场高精地图;
52.s3、获取车辆周边图像信息,并与停车场高精地图数据进行比对匹配,定位自车位置;
53.s4、探测车辆蓄电电量,并判断车辆是否需要充电;
54.s5、根据车辆是否需要充电选择目标车位,若是则选择充电停车位,否则选择立体停车位;
55.s6、将自车位置和目标车位位置结合停车场高精地图,规划自车至目标车位的行驶路径;
56.s7、根据行驶路径控制车辆自动巡航至目标车位处;
57.s8、控制车辆自动泊入目标车位。
58.其中,所述自动巡航和所述自动泊入车位时,实时获取车辆周边图像信号,识别车辆周边障碍物,进行自主避障。
59.该自动驾驶方法通过预先建立的停车场高精地图,车辆进入所选停车场后,根据车辆gps信号加载停车场高精地图,自动探测自车是否需要充电,据此选择车位,将自身位置和目标车位位置结合停车场高精地图规划行驶路径,自动按照行驶路径控制车辆行驶至目标车位处后,自动泊入目标车位,可有效的控制车辆完成自动停泊和充换电的停泊转换,方便车辆精确泊车的同时,无需驾驶人员等候,比那与电动车充换电。
60.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。