浅水湖泊悬浮颗粒物浓度modis影像遥感反演方法
技术领域
1.本发明属于环境科学及遥感监测技术领域,涉及一种基于modis遥感影像反演浅水湖泊水库悬浮颗粒物浓度的方法。
背景技术:
2.悬浮颗粒物(suspended particulate matter,spm),亦可称为总悬浮物或悬浮固体总量,系指每单位体积水含有的悬浮颗粒的总质量,包括有机和无机两种成分;其中有机组分主要包含浮游植物以及水生植物死亡后产生的有机碎屑,无机组分主要包含不溶于水的泥沙、黏土等矿物质,spm主要来源于陆源汇入或者湖泊底泥再悬浮[李瑶.内陆水体水色参数遥感反演及水华监测研究[d].北京:中国科学院大学,2017;徐轩.梁子湖水质遥感影像反演模型和时空变化格局研究[d].武汉:武汉大学,2017]。spm是非常重要的水质管理参数,因为内陆水体的spm与水体的初级生产力以及重金属和多氯联苯等微污染物的通量有关[dekker a g,vos r j,peters s w m.analytical algorithms for lake water tsm estimation for retrospective analyses of tm and spot sensor data[j].international journal of remote sensing,2002,23(1):15
‑
35.];spm浓度的高低直接关系到水体的颜色、透明度和浑浊程度,全球碳预算、营养物质运输和重金属负载等方面对生物地球化学循环至关重要[julian j,doyle m,stanley e.empirical modeling of light availability in rivers[j].journal of geophysical research:biogeosciences,2008,113(g3);r
ü
gner h,schwientek m,beckingham b,et al.turbidity as a proxy for total suspended solids(tss)and particle facilitated pollutant transport in catchments[j].environmental earth sciences,2013,69(2):373
‑
380;nasrabadi t,ruegner h,sirdari z z,et al.using total suspended solids(tss)and turbidity as proxies for evaluation of metal transport in river water[j].applied geochemistry,2016,68:1
‑
9;r,m
ü
ller r a,clow d,et al.organic carbon burial in global lakes and reservoirs[j].nature communications,2017,8(1):1
‑
7];此外,高浓度悬浮颗粒物还会改变水下光场的分布,削弱光在水下的传播进而影响湖泊水体生态系统的健康可持续发展[邬国锋,崔丽娟,纪伟涛.基于时间序列modis影像的鄱阳湖丰水期悬浮泥沙浓度反演及变化[j].湖泊科学,2009,21(02):288
‑
297]。然而,随着人口规模的扩张,人类活动日益增强,加之全球气候变化的胁迫,我国湖泊水生态安全面临巨大的威胁,湖库spm升高,水质恶化加剧,因此,快速、大范围实现湖泊spm的监测,迫在眉睫。
[0003]
相较于传统湖泊调查方法,modis卫星影像具有监测范围广、实时性强、可免费获取、动态可持续观测等优点,因而许多学者借助遥感卫星影像来探测湖泊水体spm。随着水质遥感技术的发展,用于反演湖泊水体中spm的模型也在不断丰富和完善,常见的spm反演模型根据其构建机理大致可以分为分析和半分析模型、经验和半经验模型。分析和半分析模型是基于水体中的spm与固有光学量之间的关系而构建的估算模型,由于其复杂的物理
机制和较难获取的参数,因而应用并不广泛。相较于分析和半分析模型,经验和半经验模型由于简单、操作方便等优势而获得了广泛的推广。高浑浊水体由于其强烈的后向散射,使得其水面遥感反射率(rrs)在红光及近红外波段较强[张运林.湖泊光学研究进展及其展望[j].湖泊科学,2011,23(04):483
‑
497;冯炼.卫星遥感解译湖泊蓝藻水华的几个关键问题探讨[j].湖泊科学,2021:1
‑
7],许多学者根据这一特征选取红光和近红外波段构建了大量的单波段及其波段组合模型,然而,不同湖泊由于悬浮颗粒物组份差异很大,简单的单波段和两个波段的组合构建的spm遥感反演模型普适性往往很差,无法实现迁移和推广,因此,亟待开发鲁棒性和迁移性较强的适用于浅水湖泊的spm遥感反演算法。
技术实现要素:
[0004]
本发明的目的在于解决一般的遥感反演spm的半经验算法普适性和鲁棒性较差,发明了一种适用于浅水湖泊spm遥感反演的指数spmi,并基于呼伦湖、巢湖、洪泽湖的野外实测样点的spm浓度和modis卫星影像对应的星地匹配数据点的rrs,构建了鲁棒性更强的浅水湖泊spm遥感反演模型。
[0005]
为达到上述目的,本发明采用的技术方案如下:
[0006]
一种浅水湖泊悬浮颗粒物浓度modis影像遥感反演方法,首先,选择几个典型浅水湖泊均匀布设样点,获取不同时期大量实测spm浓度数据;其次,基于所有实测样点的经纬度信息与modis卫星影像进行星地匹配,获取modis卫星影像不同波段的rrs;然后,分析归纳实测样点匹配的modis影像rrs随着spm浓度变化而呈现的规律,构建spmi指数;最后,计算得到所有实测样点匹配的modis卫星影像spmi指数结果,并与对应实测样点的spm浓度形成点对,将匹配好的点对按照2:1的比例划分为建模组和验证组,基于建模组数据构建适用于modis影像的spm遥感反演模型,利用验证组数据对模型精度进行评价。具体包括以下步骤:
[0007]
第一步,选择几个典型的浅水湖泊作为研究区,选择晴朗无云的天气,均匀布设采样点,利用黑色或棕色的聚乙烯瓶采集距离水面0.1~0.5m之间的水体,进行过滤测试,获取不同采样点的spm浓度,并同时记录采样点的经纬度信息及采样日期。
[0008]
第二步,下载获取典型湖泊采样当天及前后2天的mod09ga产品和myd09ga产品,分别采用mrt和idl对影像进行投影转换等预处理及波段融合。基于所有野外巡航测量得到的实测样点的经纬度信息和日期,匹配48小时以内过境的质量最佳的modis影像的可见光
‑
近红外波段的rrs,去除云层、噪声等影像的无效样点,构建实测样点的spm浓度与modis卫星影像rrs的有效数组。
[0009]
第三步,根据modis卫星影像rrs光谱形状及对应实测样点的spm浓度差异分类选择有代表性的典型样点,分析不同浓度的spm对应的rrs光谱曲线可以得出如下三个规律:(1)红光波段的rrs
red
随着spm浓度增加而升高;(2)当不同实测样点的绿光波段rrs
geen
近似时,spm浓度越高,绿光波段和红光波段差值(rrs
geen
‑
rrs
red
)越小;(3)在不同实测样点的红光波段rrs
red
大致相当时,随着spm浓度的升高,绿光波段和近红外波段差值(rrs
geen
‑
rrs
nir
)逐渐降低。通过以上分析,可以推断出:spm浓度与红光波段rrs
red
存在一定正向关系;与绿光波段和红光波段差值、绿光波段和近红外波段差值存在一定负向关系;由于绿光波段和近红外波段中间间隔了红光波段,因此对二者之差乘以系数0.5,据此构建spmi如公
式(1)所示:
[0010][0011]
将公式(1)经过计算简化可得公式(2):
[0012][0013]
式中,rrs
green
,rrs
red
,rrs
nir
分别是modis遥感卫星影像的绿光波段(中心波长555nm)、红光波段(中心波长645nm)和近红外波段(中心波长859nm),基于modis卫星影像构建spm遥感反演采用公式(2)即可。
[0014]
第四步,基于第二步得到的实测样点的spm浓度与modis卫星影像rrs的有效数组,借助第三步构建的spmi公式,首先得到有效实测样点匹配的modis卫星影像spmi指数结果,然后与对应实测样点的spm浓度形成点对。
[0015]
第五步,将第四步得到的点对按照2:1的比例划分为建模组和验证组,保证两组的数据都均匀分布在不同湖泊和不同时期。然后,以spmi计算结果为自变量,以spm浓度为因变量,对数据进行回归分析,得到基于modis卫星影像的spm浓度遥感反演模型;然后将模型用于验证组数据,通过验证组数据实测spm浓度和反演spm浓度计算反演结果的均方根误差,以实现浅水湖泊悬浮颗粒物浓度基于spmi构建反演模型的效果评价。
[0016]
与现有的spm研究方法相比,本发明的有益效果体现在如下几个方面:
[0017]
(1)与传统的spm监测方法相比,本发明通过modis卫星影像研究spm可以一次性获得多个浅水湖泊大范围的数据,时效性强,成本低廉,一台电脑即可完成,操作简便,且可以获取历史数据,以及由于政治、地形等原因无法获取到的湖区也可以通过modis卫星影像实现监测。
[0018]
(2)与现有的spm反演方法相比,本发明提供了一种新型的用于反演spm浓度的指数即spmi,由于该指数是依据不同湖泊、不同时期、不同样点的spm浓度及光谱曲线分析推理得到,因而模型具有更强的鲁棒性和普适性,有广阔的业务化应用前景。
附图说明
[0019]
图1为采样湖泊及spm样点的空间分布图;图a为采样湖泊空间分布图,图b为呼伦湖spm实测样点分布图,图c为洪泽湖spm实测样点分布图,图d为巢湖spm实测样点分布图。
[0020]
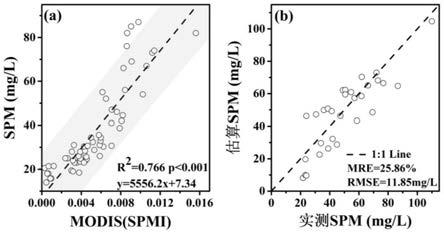
图2为三湖的spm基于modis卫星影像构建的反演模型和精度评价图;图2(a)为建模组数据的模型构建图,图2(b)为验证组数据的模型评价图。
具体实施方式
[0021]
以下结合具体实施例对本发明做进一步说明。
[0022]
一种浅水湖泊悬浮颗粒物浓度modis影像遥感反演方法,包括以下步骤:
[0023]
第一步,如图1所示,本发明自北向南选择我国比较典型的浅水湖——呼伦湖、洪泽湖和巢湖作为研究区,于2014
‑
2020年非冰期晴朗、无风天气进行采样,均匀布设样点,采用黑色或棕色1l聚乙烯细口瓶采集样品2l,水样采集完之后立刻放在车载冰箱里进行冷
藏,带回实验室进行过滤测试。spm采用称重法进行测量,用称量好的400℃高温煅烧后的0.7μm的gf/f玻璃纤维滤膜过滤一定体积的原水样,然后将滤膜在105℃下烘干4~6小时进行二次称重,两次重量差为悬浮颗粒物的重量,除以过滤的水样体积得到悬浮物浓度。
[0024]
第二步,登录modis数据官网(https://ladsweb.modaps.eosdis.nasa.gov/search/)下载获取nasa发布的mod09ga产品和myd09ga产品(二者分别是由上午星terra和下午星aqua获取的数据进行大气校正后生成的产品数据)。采用mrt对下载的影像进行裁剪和批量转换投影,之后借助idl程序批量进行波段融合。基于所有野外巡航测量得到的实测样点的经纬度信息和日期,匹配48小时以内过境的modis影像的可见光
‑
近红外波段的rrs,采用阈值法去除云层、噪声等影像的无效样点,还剩下90个有效样点,构建实测样点的spm浓度与modis卫星影像rrs的有效数组。
[0025]
第三步,分析不同浓度的spm对应的rrs光谱曲线可以得出如下三个规律:(1)红光波段的rrs
red
随着spm浓度增加而升高;(2)当绿光波段rrs
geen
近似时,spm浓度越高,绿光波段和红光波段差值(rrs
geen
‑
rrs
red
)越小;(3)在红光波段rrs
red
大致相当时,随着实测样点spm浓度的升高,绿光波段和近红外波段差值(rrs
geen
‑
rrs
nir
)逐渐降低。通过以上分析,可以推断出:spm浓度与红光波段rrs
red
存在一定正向关系;与绿光波段和红光波段差值存在一定负向关系;绿光波段和近红外波段差值存在一定负向关系;由于绿光波段和近红外波段中间间隔了红光波段,因此对二者之差乘以系数0.5;根据以上得到的推导关系本发明可以构建spmi如公式(3)所示:
[0026][0027]
将公式(3)经过计算简化可得公式(4):
[0028][0029]
式中,rrs
green
,rrs
red
,rrs
nir
分别是modis遥感卫星影像的绿光波段(中心波长555nm)、红光波段(中心波长645nm)和近红外波段(中心波长859nm),基于modis卫星影像构建spm遥感反演采用公式(4)即可。
[0030]
第四步,基于第二步得到的90个实测样点的spm浓度与modis卫星影像的有效数组,借助第三步构建的spmi公式,首先得到90个有效实测样点匹配的modis卫星影像spmi指数结果,然后与对应90个实测样点的spm浓度形成点对。
[0031]
第五步,将第四步得到的90个点对按照2:1的比例划分为建模组和验证组,保证两组的数据都均匀分布在呼伦湖、洪泽湖和巢湖,且两组数据均包含不同期的采样点。因此共计60个有效样点对用于模型构建,另外独立的30个有效样点对用于模型验证。然后,选取建模组的60个有效样点对数据,以spmi计算结果为自变量,以spm浓度为因变量,对数据进行回归分析,得到基于modis卫星影像的spm浓度遥感反演模型如图2(a)所示,模型决定系数r2达到0.766;然后将模型用于包含30个实测样点的验证组数据,通过验证组数据实测spm浓度和反演spm浓度计算反演结果的均方根误差,以实现浅水湖泊悬浮颗粒物浓度基于spmi构建反演模型的效果评价,由图2(b)可知,反演模型估算的相对误差为25.86%,均方根误差为11.85mg/l,因此,模型反演效果理想。最终得到浅水湖泊spm基于modis卫星影像
的估算模型见公式(5):
[0032]
spm
modis
=5556.2
×
spmi 7.34
ꢀꢀ
(5)
[0033]
式中,spmi是基于modis影像估算spm浓度的指数,其具体的模型构建和估算效果评价见图2。
[0034]
以上所述实施例仅表达本发明的实施方式,但并不能因此而理解为对本发明专利的范围的限制,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。