1.本实用新型涉及智能家居领域,特别涉及一种智能垃圾桶。
背景技术:
2.垃圾桶每天要收纳各种各样的废弃物,被细菌、病毒、霉菌等包围着,极易成为一个藏污纳垢的“细菌窝”,有时难免飘出难闻的异味,从而污染室内或公共环境,危害到人们的健康。为确保居家健康、公共卫生,随着人们环保意识和审美水平的提高,选择垃圾桶时除了注重美观性和实用性之外,越来越重视产品的智能化和人性化。现有的垃圾桶在使用过程中需要人工手动对其进行打开和关闭,若手中提满垃圾,则无法闲置出一只手打开垃圾桶盖,导致其使用不便。
技术实现要素:
3.为此,需要提供一种智能垃圾桶,用于解决现有垃圾桶不方便使用的技术问题。
4.为实现上述目的,发明人提供了一种智能垃圾桶,包括垃圾桶本体以及上盖,所述上盖设置在所述垃圾桶本体上方,所述上盖在相对所述垃圾桶本体的上方设置有开孔,所述上盖上设置有开合结构;
5.所述开合结构包括内齿轮以及外齿轮,所述外齿轮与所述内齿轮啮合;
6.所述内齿轮上设置有两个以上滑块,所述滑块均匀分布在所述开孔上,用于覆盖所述开孔,所述上盖上设置有与所述滑块相对应的轨道,所述滑块通过销轴在所述轨道上移动;
7.所述上盖上设置有第一感应装置,所述外齿轮与舵机传动连接,所述第一感应装置用于将检测到的信号发送至所述舵机,所述舵机驱动所述外齿轮在所述内齿轮上移动,所述销轴带动所述滑块在所述轨道上移动,所述开孔呈打开状态。
8.作为本实用新型的一种优选结构,所述智能垃圾桶还包括伸缩结构和托盘,所述垃圾桶本体设置在所述托盘上面,所述托盘底部设置有所述伸缩结构,所述伸缩结构带动所述托盘往所述上盖方向移动。
9.作为本实用新型的一种优选结构,所述伸缩结构包括两个推杆、铰接结构以及电机,所述推杆分别与所述铰接结构的两端连接,所述推杆与所述电机连接,所述电机驱动所述推杆,所述推杆驱动所述铰接结构,所述铰接结构带动所述托盘往所述上盖方向移动。
10.作为本实用新型的一种优选结构,所述智能垃圾桶还包括第二感应装置,所述第二感应装置设置在所述垃圾桶本体上方,所述第二感应装置用于将检测到的信号传送至所述伸缩结构,所述伸缩结构带动所述托盘往所述上盖方向移动。
11.作为本实用新型的一种优选结构,所述滑块上设置有腰型孔,所述销轴依次穿过所述腰型孔以及所述轨道;
12.所述舵机驱动所述外齿轮在所述内齿轮上移动,所述销轴在所述腰型孔以及所述轨道上移动,所述开孔呈打开状态。
13.作为本实用新型的一种优选结构,所述滑块为三角滑块,所述三角滑块的数量为六个。
14.作为本实用新型的一种优选结构,所述外齿轮的数量为两个,所述舵机数量与所述外齿轮数量一致,所述外齿轮设置在所述内齿轮的两侧,每个所述外齿轮与所述内齿轮啮合的长度为所述内齿轮的四分之一弧度。
15.区别于现有技术,上述技术方案通过舵机驱动外齿轮,外齿轮在内齿轮上移动,销轴带动滑块在轨道上移动,使得垃圾桶上方的开孔打开。实际使用时,当第一感应装置检测到厨余垃圾靠近智能垃圾桶周围20毫米时,第一感应装置将检测到的这个信号发送到舵机,舵机驱动外齿轮在内齿轮上移动,由销轴带动覆盖在开孔上的滑块在轨道上移动,最终使开孔呈打开状态。使用者使用时,仅需将垃圾靠近垃圾桶,垃圾桶本体上开孔就会自动打开,从而方便使用者将垃圾丢入垃圾桶。
附图说明
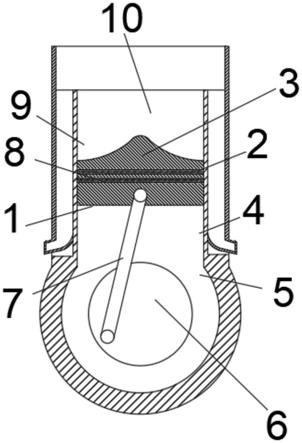
16.图1为具体实施方式所述智能垃圾桶的剖视图;
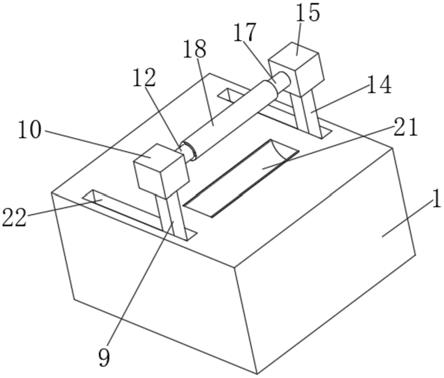
17.图2为具体实施方式所述智能垃圾桶的俯视图;
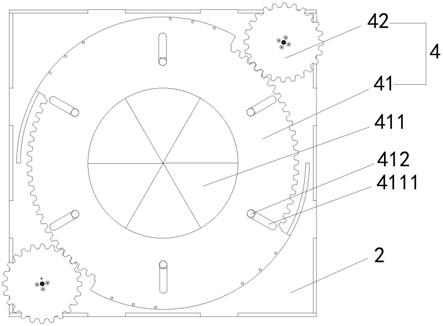
18.图3为具体实施方式所述上盖的结构示意图;
19.图4为具体实施方式所述滑块在所述上盖上的结构示意图。
20.附图标记说明:
21.1、垃圾桶本体;
22.2、上盖;
23.21、轨道;
24.3、开孔;
25.4、开合结构;
26.41、内齿轮;
27.411、滑块;
28.4111、腰型孔;
29.412、销轴;
30.42、外齿轮;
31.5、舵机;
32.6、推杆;
33.7、铰接结构;
34.8、托盘。
具体实施方式
35.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
36.在本技术的描述中,除非另有明确的规定和限定,术语“第一”、“第二”、仅用于描述的目的,而不能理解为指示或暗示相对重要性;除非另有规定或说明,术语“多个”是指两个或两个以上;术语“连接”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可
以是可拆卸连接,或一体地连接,或电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
37.本说明书的描述中,需要理解的是,本技术实施例所描述的“上”、“下”、“左”、“右”等方位词是以附图所示的角度来进行描述的,不应理解为对本技术实施例的限定。此外,在上下文中,还需要理解的是,当提到一个元件连接在另一个元件“上”或者“下”时,其不仅能够直接连接在另一个元件“上”或者“下”,也可以通过中间元件间接连接在另一个元件“上”或者“下”。
38.请参阅图1至图4,本实施例涉及一种智能垃圾桶,包括垃圾桶本体1以及上盖2,所述上盖2设置在所述垃圾桶本体1上方,所述上盖2在相对所述垃圾桶本体1的上方设置有开孔3,所述上盖2上设置有开合结构4;所述开合结构4包括内齿轮41以及外齿轮42,所述外齿轮42与所述内齿轮41啮合;所述内齿轮41上设置有两个以上滑块411,所述滑块411均匀分布在所述开孔3上,用于覆盖所述开孔3,所述上盖2上设置有与所述滑块411相对应的轨道21,所述滑块411通过销轴412在所述轨道21上移动;所述上盖2上设置有第一感应装置,所述外齿轮42与舵机5传动连接,所述第一感应装置用于将检测到的信号发送至所述舵机5,所述舵机5驱动所述外齿轮42在所述内齿轮41上移动,所述销轴412带动所述滑块411在所述轨道21上移动,所述开孔3呈打开状态。通常情况下垃圾桶本体1处于智能垃圾桶内部,垃圾桶本体1上设置有上盖2,上盖2上设置有开孔3,使用者通过开孔3将垃圾丢入垃圾桶本体。通过在上盖2上设置有开合结构4,开合结构4包括内齿轮41和外齿轮42,内齿轮41上设置有两个以上的滑块411,滑块411间均匀分布在开孔3上并用于覆盖开孔3,开孔3呈关闭状态。使用者进行使用时,第一感应装置检测到垃圾靠近智能垃圾桶周围20毫米时,第一感应装置将检测到的信号发送至舵机5,再由舵机5带动外齿轮42在内齿轮41上移动,同时,内齿轮41上的滑块411随着外齿轮42在内齿轮41上的移动在轨道21上移动,随着滑块411在轨道21上移动,使得覆盖在开孔3上的滑块411打开,开孔3呈打开状态。
39.优选的,智能垃圾桶除了能单独放置外,还能将此嵌入到桌面上,从而节省空间。将智能垃圾桶用于厨房,在准备食材时,往往会产生许多垃圾,这时候直接将垃圾扔到桌面上设置的垃圾桶即可,从而方便使用者的日常使用。
40.作为一优选实施例,当开孔3呈打开状态,使用者将垃圾丢入垃圾桶本体1后,由于程序设置,舵机5能自动带动外齿轮42在内齿轮41上移动,滑块411按照各自的轨道移动,此时的移动都是使滑块411往靠近开孔3方向移动,从而使得开孔3从打开状态转换为关闭状态,最终使得智能垃圾桶的打开与关闭形成一个循环。
41.作为一优选实施例,请参阅图2,所述滑块411为三角滑块,所述三角滑块的数量为六个。开合结构4采用螺旋开口装置,用arduino控制数字舵机的转动,带动六个滑块进行螺旋转动,从而形成一个200毫米圆口。在实际使用时,通过第一感应装置检测厨余垃圾靠近智能垃圾桶周围20毫米时,将信号传输至arduino板,再有arduino控制舵机5的转动,再由舵机5带动外齿轮42在内齿轮41上移动,同时,内齿轮41上的滑块411随着外齿轮42在内齿轮41上的移动在轨道21上移动,随着滑块411在轨道21上移动,使得覆盖在开孔3上的六个滑块往远离开孔3方向移动,开孔3呈打开状态。
42.优选的,所述外齿轮42的数量为两个,所述舵机5数量与所述外齿轮42数量一致,
所述外齿轮42设置在所述内齿轮41的两侧,每个所述外齿轮42与所述内齿轮41啮合的长度为所述内齿轮41的四分之一弧度。外齿轮42的数量为两个,舵机5的数量跟外齿轮42的数量一致,当舵机5接收到信号时,两个舵机5同时带动外齿轮42在内齿轮41上移动,从而使得滑块411在轨道21上移动的速度加快,从而缩短开孔3打开的时间。设置外齿轮42与内齿轮41啮合的长度为所述内齿轮41的四分之一弧度,是为了保证外齿轮42在内齿轮41上移动时,滑块411在轨道21上移动,从而使得开孔3呈打开或关闭状态。当然,啮合长度可以比内齿轮41的四分之一弧度更长,只要保证滑块411在轨道21上移动,从而使开孔3呈打开或关闭状态。
43.优选的,所述滑块411上设置有腰型孔4111,所述销轴412依次穿过所述腰型孔4111以及所述轨道21;所述舵机5驱动所述外齿轮42在所述内齿轮41上移动,所述销轴412在所述腰型孔4111以及所述轨道21上移动,所述开孔3呈打开状态。实际使用时,由于滑块411间相互配合用于覆盖开孔3,因此,在舵机5接受信号后,舵机5驱动外齿轮42在内齿轮41上移动时,覆盖在开孔3上的滑块411由于滑块411与滑块411间的覆盖顺序依次按照各自的轨道21移动,从而使得开孔3呈打开状态。由于滑块411需要依次按照各自的轨道移动,因此,开孔3从关闭状态到打开状态这个过程需要一些时间。通过在滑块411设置腰型孔4111,如图2所示,设置腰型孔4111的目的在于,当舵机5驱动外齿轮42在内齿轮41上移动时,销轴412带动滑块411在轨道21上移动,为了满足不同滑块411间同时依照各自轨道21移动,滑块411与滑块411间顺着轨道21移动时不会出现相互抵触的状况,在滑块411上设置腰型孔4111从而改变滑块411顺着各自轨道21移动时,滑块411的角度会有所变化,从而使得滑块411能同时按照各自轨道21移动,这时候开孔3从关闭状态到打开状态这个过程需要的时间就有所减少,因此,当第一感应装置检测到信号的同时,开孔3能迅速的从关闭状态转换成打开状态,从而方便使用者进行使用。
44.优选的,如图1所示,所述智能垃圾桶还包括伸缩结构和托盘8,所述垃圾桶本体1设置在所述托盘8上面,所述托盘8底部设置有所述伸缩结构,所述伸缩结构带动所述托盘8往所述上盖2方向移动。设置伸缩结构使得垃圾桶本体1往上盖2方向移动,从而方便使用者将托盘8上的垃圾桶本体1拿出并将垃圾桶本体1内的垃圾倒掉。
45.优选的,如图1所示,所述伸缩结构包括两个推杆6、铰接结构7以及电机,所述推杆6分别与所述铰接结构7的两端连接,所述推杆6与所述电机连接,所述电机驱动所述推杆6,所述推杆6驱动所述铰接结构7,所述铰接结构7带动所述托盘8往所述上盖2方向移动。其中,铰接结构7由网片活络连接成双菱形结构,网片通过多点饺接并在连接处采用铆钉活接,使得铰接结构能在推杆的作用下,实现上下伸缩。实际使用时,由电机驱动推杆6,推杆6驱动双菱形结构的网片向上伸长,从而带动托盘8上的垃圾桶本体1往上盖2方向移动,从而方便使用者将托盘8上的垃圾桶本体1拿出并将垃圾桶本体内的垃圾倒掉。
46.优选的,所述智能垃圾桶还包括第二感应装置,所述第二感应装置设置在所述垃圾桶本体1上方,所述第二感应装置用于将检测到的信号传送至所述伸缩结构,所述伸缩结构带动所述托盘8往所述上盖2方向移动。在实际使用时,当第二感应装置感应到垃圾桶中的垃圾存放量到达80%时,感应信号传输至伸缩结构,从而将垃圾桶本体1通过往上盖2方向抬升,当垃圾桶本体1通过伸缩结构抬升到上盖2时,使用者可以将垃圾桶本体1拿出并将垃圾桶本体1内的垃圾倒出,这个过程中开孔始终保持打开的状态,当垃圾桶本体的垃圾倒
出后,再将垃圾桶本体1放置到托盘8上,伸缩结构会自动将托盘8往远离上盖2的方向移动,当托盘8移动到位时,此时开孔3从打开状态转变为关闭状态,最终智能垃圾桶回复到最开始的状态。第二感应装置能自动的检测到垃圾桶本体内的垃圾存放量,当垃圾存放量到达80%时,自动地将垃圾桶本体1往上盖2方向移动,将垃圾桶本体内的垃圾清理干净后,再将垃圾桶本体1放置托盘8上,实现垃圾桶本体1的自动回收,最终方便使用者对垃圾桶内垃圾的清理。
47.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型专利的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。