1.本发明涉及一种通过无刷电动机的驱动力来控制内燃机的阀的开闭时期的阀正时控制装置。
背景技术:
2.以往,人们使用能够根据内燃机(以下,也称为“发动机”)的运转状况来改变进气阀、排气阀的开闭时期的阀正时控制装置。该阀正时控制装置具有以下机构:例如,通过改变从动侧旋转体相对于发动机的工作而引起的驱动侧旋转体的旋转的相对旋转相位(以下,也简称为“相对旋转相位”),从而改变进气阀和排气阀的开闭时期。此外,近年,在正常运转中,例如,在踩踏刹车踏板而停车时使发动机暂时停止的怠速停止控制(怠速停机控制)已得到实用化。在如上述怠速停止时等较快重启的情况下,在阀正时控制装置中,为了减少发动机的负荷并为重启做准备,相对旋转相位需要停留于最大滞后角。然而,在使怠速停止的发动机再启动时,难以通过作用于凸轮轴的气缸内的压力等外力,将相对旋转相位维持于最大滞后角。因此,考虑在再启动发动机时,将电动机设为锁定状态。作为这样的用于将电动机设为锁定状态的技术,例如,存在下文中引用的专利文献1中记载的结构。
3.在专利文献1中公开了一种电动机驱动装置。该电动机驱动装置对具有进行三相绕组的通电的多个开关元件的开关回路进行控制,从而驱动三相无刷电动机。当无刷电动机为电动机锁定状态时,以仅对开关回路的一相进行pwm控制的方式对绕组通电。专利文献
4.专利文献1:日本特开2007
‑
228768号公报
技术实现要素:
5.对于专利文献1中记载的技术,由于仅对开关回路的一相进行pwm控制,因而在该通电控制中电流以特定的元件以及绕组为中心而流动。因此,可能会发生特定的元件的温度上升、元件老化或损伤的情况。
6.因此,人们寻求一种即使在将无刷电动机设为锁定状态的情况下,也能够抑制元件的老化和损伤的阀正时控制装置。
7.本发明涉及的阀正时控制装置的特征结构在于以下方面:该阀正时控制装置包括:驱动侧旋转体、从动侧旋转体、相位设定机构无刷电动机、控制部、指令信息获取部,上述驱动侧旋转体相对于内燃机的曲轴同步旋转,上述从动侧旋转体与上述驱动侧旋转体的旋转轴心同轴心地配置,并且与上述内燃机的凸轮轴一体旋转,上述相位设定机构设定上述驱动侧旋转体与上述从动侧旋转体的相对旋转相位,上述无刷电动机驱动上述相位设定机构,上述控制部向逆变器通电,从而控制上述无刷电动机,上述逆变器在第1电源线和连接于比上述第1电源线的电位更低的电位的第2电源线之间具备3组桥臂部,上述桥臂部具有串联连接的高压侧开关元件和低压侧开关元件,上述指令信息获取部获取表示保持上述无刷电动机的转子不旋转的状态的指令的保持指令信息,在上述指令信息获取部获取了上
述保持指令信息的情况下,上述控制部以由第1通电状态以及第2通电状态形成的第1通电模式对上述无刷电动机进行控制,上述第1通电状态是上述3组桥臂部中的任一组桥臂部的上述高压侧开关元件、以及上述3组桥臂部中的剩下的两组桥臂部中的一组桥臂部的上述低压侧开关元件均成为闭状态的状态,上述第2通电状态是上述3组桥臂部中的上述任一组的桥臂部的上述高压侧开关元件成为闭状态的状态。
8.通过上述特征结构,在出现保持无刷电动机的转子不旋转的状态的指令的情况下,控制部以第1通电模式来控制无刷电动机,因而即使将无刷电动机设为锁定状态也能够抑制流至逆变器的开关元件以及无刷电动机的线圈的电流,能够抑制发热。即,虽然在电流仅流至三相无刷电动机中的特定的一相的情况下发热增大,但可以通过使电流流至另外的一相来抑制发热。因此,根据本阀正时控制装置,能够抑制元件的老化和损伤,并将驱动侧旋转体与从动侧旋转体的相对旋转相位保持于指定的相对旋转相位(例如,最大滞后角相位)。
9.此外,优选地,在预先设定的切换条件成立的情况下,上述控制部从上述第1通电模式切换至由第3通电状态以及第4通电状态形成的第2通电模式来对上述无刷电动机进行控制,上述第3通电状态是上述3组桥臂部中的上述任一组桥臂部的上述高压侧开关元件、以及上述3组桥臂部中的上述剩下的两组桥臂部中的另一组桥臂部的上述低压侧开关元件均成为闭状态的状态,上述第4通电状态是上述3组桥臂部中的上述任一组桥臂部的上述高压侧开关元件成为闭状态的状态。
10.通过上述结构,在预先设定的切换条件成立的情况下,控制部从第1通电模式切换至第2通电模式来对无刷电动机进行控制,因而能够使无刷电动机的锁定状态中的元件的发热状况不同。
11.此外,优选地,上述阀正时控制装置进一步具备温度检测部,上述温度检测部检测上述逆变器、上述无刷电动机的线圈、以及上述无刷电动机中的至少任一者的环境温度,在基于上述第1通电模式的上述无刷电动机的控制中,在上述环境温度超过预先设定的温度的情况下,上述控制部切换至上述第2通电模式来控制上述无刷电动机。
12.通过上述结构,在逆变器、无刷电动机的线圈、以及无刷电动机中的至少任一者的环境温度超过预先设定的温度的情况下,能够使元件的发热状况不同。
13.此外,优选地,上述阀正时控制装置进一步具备存储用于推定温度的映射图(map)的映射图存储部,上述用于推定温度的映射图对由向上述无刷电动机通电的通电电流的电流值与该通电电流的通电时间规定的上述逆变器、上述无刷电动机的线圈、以及上述无刷电动机中的至少任一者的温度进行推定,上述控制部基于上述用于推定温度的映射图来对上述第1通电模式与上述第2通电模式进行切换,从而控制上述无刷电动机。
14.通过上述结构,在例如逆变器、无刷电动机的线圈、以及无刷电动机中的至少任一者的推定温度达到指定温度的情况下,能够使元件的发热状況不同。
15.此外,优选地,上述第2通电模式中的向上述无刷电动机通电的通电电流大于上述第1通电模式中的向上述无刷电动机通电的通电电流,且上述第2通电模式中的对上述无刷电动机的上述通电电流的通电时间小于上述第1通电模式中的对上述无刷电动机的上述通电电流的通电时间。
16.在阀正时控制装置的相对旋转相位停留于最大滞后角,但使电流流至最优选的一
相时产生的力与并不优选的另外的一相中的力相同的情况下,流至另外的一相的电流的电流值必须大于流至最优选的一相的电流的电流值。通过上述结构,虽然流至另外的一相的电流的电流值较大,但对另外的一相的通电时间可以小于对最优选的一相的通电时间。因此,能够抑制流至逆变器的开关元件以及无刷电动机的线圈的电流,并能够使无刷电动机的温度的管理最优化。
附图说明
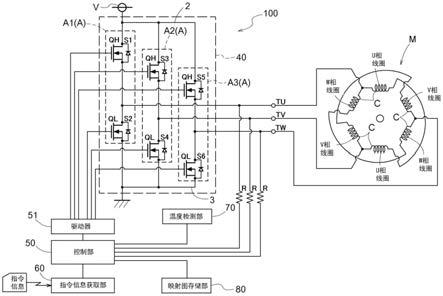
17.图1为阀正时控制装置的剖视图。图2为显示电动机以及逆变器的结构的图。图3为表示开关元件的开闭状态的时间图。图4为表示第1通电模式中的开关元件的开闭状态的时间图。图5为表示第2通电模式中的开关元件的开闭状态的时间图。图6为温度变化的说明图。
具体实施方式
18.本发明涉及的阀正时控制装置即使在将无刷电动机设为锁定状态的情况下,也能够抑制元件的老化和损伤。以下,对本实施方式的阀正时控制装置100进行说明。
19.图1为阀正时控制装置100的剖视图,图2为表示阀正时控制装置100的无刷电动机(以下,称为“电动机”)m、以及驱动该电动机m的逆变器40的结构的图。如图1和图2所示,阀正时控制装置100通过具备驱动壳体(“驱动侧旋转体”的一个例子)10、内部转子(“从动侧旋转体”的一个例子)20、相位设定机构30、电动机m、逆变器40、控制部50、指令信息获取部60、温度检测部70以及映射图存储部80而构成,特别是,为了进行关于抑制元件的老化和损伤的处理,控制部50、指令信息获取部60以及映射图存储部80以cpu为核心部件,由硬件或软件,或者这两者来构成。
20.驱动壳体10相对于内燃机e的曲轴1同步旋转。内燃机e具有通过阀正时控制装置100来控制开闭时期的进气阀va。曲轴1担当输出来自于内燃机e的旋转力的输出轴。在驱动壳体10的外周面设有驱动皮带轮11,同步皮带6横跨曲轴1的输出皮带轮1s而卷绕。由此,能够实现驱动壳体10与曲轴1的同步旋转。
21.内部转子20与驱动壳体10的旋转轴心x同轴心地配置,并与内燃机e的进气凸轮轴7(在本实施方式中,为用于进气阀va的凸轮轴)一体旋转。与驱动壳体10的旋转轴心同轴心地配置是指以内部转子20的轴心与驱动壳体10的轴心一致的状态配置。内部转子20被内包于驱动壳体10,并通过连结螺栓23连结固定于进气凸轮轴7。由此,内部转子20在与进气凸轮轴7连结的状态下被支承,并且驱动壳体10以相对旋转自如的方式被支承于内部转子20的外周部位。
22.相位设定机构30设定驱动壳体10与内部转子20的相对旋转相位。相位设定机构30由电动机m驱动,并且相位设定机构30与内部转子20共同被收纳于驱动壳体10内。在驱动壳体10的开口部分通过多个紧固螺栓25紧固固定有前板24。由此,相位设定机构30与内部转子20的在沿旋转轴心x的方向上的变位被前板24限制。
23.如上所述,通过来自于同步皮带6的驱动力,驱动壳体10以及内部转子20顺时针旋
转。对于相位设定机构30,电动机m的驱动力经由相位设定机构30而传递至内部转子20,从而使内部转子20相对于驱动壳体10的相对旋转相位发生变位。在该变位中,将朝向与基于来自于同步皮带6的驱动力的旋转方向(顺时针方向)同方向的变位方向称为提前角方向,并将其反方向称为滞后角方向。
24.相位设定机构30具备齿圈26、内齿轮27、偏心凸轮体28、前板24以及接头部j,上述齿圈26与旋转轴心x同轴心地形成于内部转子20的内周,上述内齿轮27以与偏心轴心y同轴心的方式旋转自如地配置于内部转子20的内周侧,上述偏心凸轮体28配置于内齿轮27的内周侧。偏心轴心y形成为与旋转轴心x平行的姿势。
25.齿圈26具有多个内齿部26t,内齿轮27具有多个外齿部27t。外齿部27t的一部分与齿圈26的内齿部26t啮合。该相位设定机构30构成为内齿轮27的外齿部27t的齿数仅比齿圈26的内齿部26t的齿数少1个齿的行星齿轮减速机。
26.在本实施方式中,在内燃机e运转时,输出轴ma以与曲轴1相等的速度顺时针地驱动旋转,由此维持驱动壳体10与内部转子20的相对旋转相位。并且,在使相对旋转相位向提前角方向变位的情况下,进行减少输出轴ma的旋转速度的控制,在使相对旋转相位向滞后角方向变位的情况下,进行增大输出轴ma的旋转速度的控制。
27.即,对于相位设定机构30,随着电动机m的驱动所产生的输出轴ma的旋转,当偏心凸轮体28以旋转轴心x为中心而旋转时,内齿轮27每旋转一周,都使内齿轮27与齿圈26仅相对旋转对应于齿数差的角度。因此,能够使通过継手部j而相对于内齿轮27一体旋转的驱动壳体10、与通过连结螺栓23连结于齿圈26的进气凸轮轴7相对旋转,从而能够进行阀正时的调节。
28.控制部50向逆变器40通电从而控制电动机m。对于向逆变器40的通电,基于电动机m的转子(未图示)的位置来切换线圈c的通电状态。转子的位置是指根据向电动机m的线圈c的通电而旋转的转子的位置(旋转角)。切换线圈c的通电状态是指依次切换至电流从u相端子tu流至v相端子tv的状态、电流从u相端子tu流至w相端子tw的状态、电流从v相端子tv流至w相端子tw的状态、电流从v相端子tv流至u相端子tu的状态、电流从w相端子tw流至u相端子tu的状态、电流从w相端子tw流至v相端子tv的状态。控制部50生成pwm信号,并对后述逆变器40进行pwm控制。由此,能够控制对电动机m的线圈c的通电。这样的基于pwm信号的pwm控制是公知的技术,因此省略说明。
29.驱动器51设置于控制部50与逆变器40之间,并被输入由控制部50生成的pwm信号。驱动器51提高被输入的pwm信号的驱动能力并将其输出至逆变器40。
30.逆变器40控制流至电动机m的线圈c的电流。此外,逆变器40具备3组桥臂部a,这3组桥臂部a在第1电源线2和第2电源线3之间具有串联地连接的高压侧开关元件qh和低压侧开关元件ql,上述第2电源线3连接于比该第1电源线2的电位更低的电位。第1电源线2是指与电源v连接的电缆。连接于比第1电源线2的电位更低的电位的第2电源线3是指被外加低于电源v的输出电压的电位的电缆,在本实施方式中,相当于接地的电缆。
31.在本实施方式中,使用n
‑
mosfet来构成高压侧开关元件qh以及低压侧开关元件ql。在高压侧开关元件qh中,漏极端子与第1电源线2连接,源极端子与低压侧开关元件ql的漏极端子连接。低压侧开关元件ql的源极端子与第2电源线3连接。通过如此连接的高压侧开关元件qh以及低压侧开关元件ql来构成桥臂部a,逆变器40具备3组这样的桥臂部a。
32.高压侧开关元件qh以及低压侧开关元件ql各自的栅极端子与驱动器51连接,并被输入上述提高了驱动能力的pwm信号。此外,各桥臂部a的高压侧开关元件qh的源极端子与电动机m具有的3个端子(u相端子tu、v相端子tv、w相端子tw)各自连接。
33.在此,为了易于理解,将源极端子与u相端子tu直接连接的高压侧开关元件qh设为开关s1,并将漏极端子与u相端子tu直接连接的低压侧开关元件ql设为开关s2。此外,将具有开关s1以及开关s2的桥臂部a设为第1桥臂部a1。另外,将源极端子与v相端子tv直接连接的高压侧开关元件qh设为开关s3,并将漏极端子与v相端子tv直接连接的低压侧开关元件ql设为开关s4。此外,将具有开关s3以及开关s4的桥臂部a设为第2桥臂部a2。另外,将源极端子与w相端子tw直接连接的高压侧开关元件qh设为开关s5,并将漏极端子与w相端子tw直接连接的低压侧开关元件ql设为开关s6。此外,将具有开关s5以及开关s6的桥臂部a设为第3桥臂部a3。
34.在图3中,示出了从控制部50输入至各开关s1~开关s6各自的栅极端子的控制信号。由此,电动机m的转子能够适当地进行旋转,从而能够维持相对旋转相位。应予说明,如上所述,在改变相对旋转相位的情况下,可以通过调节图3中的各部分的接通占空比(on duty)的时间来实现。此外,在图3中,在电流从u相端子tu流至v相端子tv的情况下,记载了作为通电方式,对其他通电方式也相同。应予说明,控制部50通过并联电阻r(相当于电流检测部)检测在电动机m的线圈c中流通的电流的电流值,并基于该电流值以及由指令信息获取部60获取的指令信息,通过反馈控制来控制电动机m。
35.指令信息获取部60获取由电动机m所需要的旋转数以及电动机m所需要的输出转矩形成的指令信息。该指令信息例如传递自上位系统(管理阀正时控制装置100整体的动作的管理系统)。指令信息被传递至控制部50,然后控制部50进行上述反馈控制。
36.例如,在怠速停止后再启动内燃机e时,有时想要将相对旋转相位维持于最大滞后角,即,想要在再启动内燃机e时,将电动机m设为锁定状态。在这样的情况下,指令信息获取部60获取表示保持电动机m不旋转的状态的指令的保持指令信息作为指令信息。这样的保持指令信息也传递自上述上位系统。一旦指令信息获取部60获取了保持指令信息,就将保持指令信息传递至控制部50。
37.在指令信息获取部60获取了保持指令信息的情况下,控制部50以由第1通电状态以及第2通电状态形成的第1通电模式来控制电动机m。第1通电模式为向指定的一相通电的模式。图4示出了第1通电模式中的被输入至开关s1~开关s6各自的栅极端子的控制信号。在图4中,示出了在通电方式为在图4中,示出了在通电方式为的状态时获取保持指令信息的例子。
38.第1通电状态是3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh、以及3组桥臂部a中的剩下的两组桥臂部a中的一组桥臂部a的低压侧开关元件ql均成为闭状态的状态。在本实施方式中,为了易于理解,将3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh设为开关s1来进行说明。此外,将3组桥臂部a中的剩下的两组桥臂部a中的一组桥臂部a的低压侧开关元件ql设为开关s4来进行说明。在此,成为闭状态的状态是指在pwm控制的1个周期中至少存在闭状态的状态,是指该1个周期不全为开状态的状态。在该第1通电状态下,经由开关s1、u相端子tu、u相的线圈c、v相端子tv、开关s4的电流、以及经由开关s1、u相端子tu、w相的线圈c、v相的线圈c、v相端子tv、开关s4的电流进行流动。
39.第2通电状态是3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh成为闭状态
的状态。在本实施方式中,3组桥臂部a中的剩下的两组桥臂部a中的一组桥臂部a的高压侧开关元件qh也被设为闭状态。在本实施方式中,如上所述,3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh为开关s1,3组桥臂部a中的剩下的两组桥臂部a中的一组桥臂部a的高压侧开关元件qh为开关s3。如上所述,该成为闭状态的状态是指在pwm控制中的1个周期中至少存在闭状态的状态,是指该1个周期不全为开状态的状态。在该第2通电状态下,在第1通电状态中流至各个线圈c的电流导致经由开关s1、u相端子tu、u相的线圈c、v相端子tv、开关s3的电流、以及经由开关s1、u相端子tu、w相的线圈c、v相的线圈c、v相端子tv、开关s3的电流进行流动。
40.在图4的例子中,示出了在出现保持指令信息后,在1个周期的整个周期中进行第1通电模式的方式。应予说明,第1通电模式可以在1个周期中结束,也可以持续2个周期以上反复进行。
41.通过这样的第1通电模式,能够在不使电动机m的转子旋转的情况下向电动机m通电,因而能够在不使电动机m旋转的情况下产生输出转矩。因此,能够在怠速停止后再启动内燃机e时,将相对旋转相位维持于最大滞后角。
42.在本实施方式中,控制部50构成为在预先设定的切换条件成立的情况下,从第1通电模式切换至由第3通电状态以及第4通电状态形成的第2通电模式而对电动机m进行控制。预先设定的切换条件是指将电动机m的控制方式从第1通电模式切换至与该第1通电模式不同的第2通电模式的条件(在后文中对切换条件进行说明)。第1通电模式是指按照上述图4所示的图形来控制电动机m的方式。第2通电模式是相对于基于第1通电模式的通电方式,通过以电角度向提前角侧60度的所谓的“60度滞后角”来通电的模式(60度滞后角通电)。在图5中示出了被输入至第2通电模式中的开关s1~开关s6各自的栅极端子的控制信号。此外,在图5中,示出了在出现保持指令信息后,交替切换至第1通电模式和第2通电模式的例子。
43.第3通电状态是3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh、以及3组桥臂部a中的剩下两组桥臂部a的另一组桥臂部a的低压侧开关元件ql均成为闭状态的状态。3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh在本实施方式中指开关s5。3组桥臂部a中的剩下的两组桥臂部a中的另一组桥臂部a的低压侧开关元件ql在本实施方式中指开关s4。在此,在第3通电状态下,成为闭状态的状态也是指在pwm控制的1个周期中至少存在闭状态的状态,指该1个周期不全为开状态的状态。在该第3通电状态下,经由开关s5、w相端子tw、v相的线圈c、v相端子tv、开关s4的电流、以及经由开关s5、w相端子tw、w相的线圈c、u相的线圈c、v相端子tv、开关s4的电流进行流动。
44.第4通电状态是3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh成为闭状态的状态。在本实施方式中,3组桥臂部a中的剩下的两组桥臂部a中的另一组桥臂部a的高压侧开关元件qh也被设为闭状态。在本实施方式中,3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh是指开关s5,3组桥臂部a中的剩下两组桥臂部a中的另一组桥臂部a的高压侧开关元件qh是指开关s3。如上所述,成为该闭状态的状态是指在pwm控制的1个周期中至少存在闭状态的状态,指该1个周期不全为开状态的状态。在该第4通电状态下,3组桥臂部a中的任一低压侧开关元件ql也被设为开状态。由此,在第3通电状态中流至各个线圈c的电流导致经由开关s5、w相端子tw、v相的线圈c、v相端子tv、开关s3的电流、以及经由开关s5、w相端子tw、w相的线圈c、u相的线圈c、v相端子tv、开关s3的电流进行流动。
45.通过这样的第2通电模式,能够在不使电动机m的转子旋转的情况下向各个线圈c通电,因而能够在不使电动机m旋转的情况下生成输出转矩。此外,在阀正时控制装置100中,例如,在怠速停止后再启动内燃机e时,有时将相对旋转相位维持于最大滞后角。在这种情况下,为了使相对旋转相位停留于最大滞后角,通过使电流流至电动机m的3相中的最合适的一相,从而将相对旋转相位保持于最大滞后角。例如,如果电流仅流至特定的一相,则在该特定的一相中的发热将增大,但根据本阀正时控制装置100,电流也流至另外的一相,因而能够分散上述发热。此外,通过使电流也流至另外的一相来抑制发热,从而能够将相对旋转相位维持于所期望的相位。应予说明,在图5的例子中,依次示出了第4通电状态、第3通电状态。
46.在此,对上文所述的控制部50从第1通电模式切换至第2通电模式的预先设定的切换条件进行说明。例如,控制部50优选在基于第1通电模式的电动机m的控制中,在环境温度超过预先设定的温度的情况下,切换至第2通电模式来控制逆变器40。在基于第1通电模式的电动机m的控制中是指在本实施方式中按照图4所示的图形向电动机m通电的状态。环境温度是指逆变器40、电动机m的线圈c以及电动机m中至少任一者的环境温度。
47.上述环境温度也可以通过温度检测部70来检测。关于温度检测部70,可以在安装有逆变器40的各个开关元件qh,ql的基板上使用例如电阻值随着温度变化的热敏电阻而构成。这样的使用热敏电阻的温度检测是公知的技术,因而省略说明。温度检测部70也可以通过热敏电阻以外的方法来检测环境温度。此外,也可以使用公知的热敏电阻、传感器来检测电动机m的线圈c以及电动机m的温度。
48.控制部50构成为获取温度检测部70的检测结果的结构,并且优选在第1通电模式中的检测结果(逆变器40、电动机m的线圈c以及电动机m中的至少任一者的环境温度)超过预先设定的温度的情况下,切换至第2通电模式。
49.控制部50也可以基于用于推定温度的映射图来切换第1通电模式与第2通电模式从而控制电动机m,上述切换可替代上述基于环境温度的切换,或者与基于环境温度的切换一起使用。用于推定温度的映射图是指推定由相对于电动机m的通电电流的电流值与该通电电流的通电时间规定的逆变器40、电动机m的线圈c以及电动机m中至少任一者的温度的映射图。向电动机m通电的通电电流的电流值可以是从逆变器40输出的电流的电流值,也可以是流经电动机m的线圈c的电流的电流值。此外,该电流值可以是通电电流的平均值,也可以是有效值。通电电流的通电时间是指上述电流值的通电电流从逆变器40输出的时间,或流经电动机m的线圈c的时间。这样的用于推定温度的映射图优选被预先存储于映射图存储部80,控制部50参照用于推定温度的映射图,计算逆变器40的开关元件qh,ql、电动机m的线圈c的温度上升并进行累计,在累计值达到指定值的情况下,从第1通电模式切换至第2通电模式。
50.此外,控制部50也可以在从第1通电模式切换至第2通电模式后,基于通过逆变器40的环境温度和用于推定温度的映射图而推定的逆变器40的温度,从第2通电模式切换至第1通电模式来控制电动机m,进而,也可以交替切换至第1通电模式和第2通电模式来控制电动机m。
51.在此,控制部50可以以第2通电模式中的向电动机m通电的通电电流大于第1通电模式中的向电动机m通电的通电电流,且第2通电模式中的对电动机m的通电电流的通电时
间小于第1通电模式中的对电动机m的通电电流的通电时间的方式来控制电动机m。具体而言,可以将第2通电模式中的向电动机m通电的通电电流设为5a,并将第1通电模式中的向电动机m通电的通电电流设为不足5a(例如,3a),可以将第2通电模式中的对电动机m的通电电流的通电时间设为0.5秒,并将第1通电模式中的对电动机m的通电电流的通电时间设为不足0.5秒(例如,0.3秒)。
52.以上述方式构成阀正时控制装置100,如图6(a)所示,控制部50通过第1通电模式与第2通电模式来控制流至电动机m的电流(相电流),并通过反复进行基于第1通电模式的一相通电、与基于第2通电模式的60度提前角通电,防止电动机m的线圈c的通电相以及向开关元件qh,ql的电流的单极集中,如图6(b)所示,能够抑制电动机m的线圈c以及逆变器40的各个开关元件qh,ql的温度上升。因此,能够抑制元件的老化。
53.[其他实施方式]在上述实施方式中,列举说明了阀正时控制装置100控制进气阀va的开闭时期的情况的例子,但阀正时控制装置100也可以控制排气阀的开闭时期,也可以控制进气阀va以及排气阀这两者的开闭时期。
[0054]
在上述实施方式中,说明了控制部50在预先设定的切换条件成立的情况下,从第1通电模式切换至第2通电模式来控制电动机m,但控制部50也可以不从第1通电模式切换至第2通电模式,仅通过第1通电模式来控制电动机m。
[0055]
在上述实施方式中,说明了阀正时控制装置100具备温度检测部70,该温度检测部70检测逆变器40、电动机m的线圈c以及电动机m中的至少任一者的环境温度,但阀正时控制装置也可以不具备温度检测部70。
[0056]
在上述实施方式中,说明了阀正时控制装置100具备存储用于推定温度的映射图的存储部80,该用于推定温度的映射图推定由相对于电动机m的通电电流的电流值以及该通电电流的通电时间规定的逆变器40的温度,但阀正时控制装置也可以不具备映射图存储部80。
[0057]
此外,在具备温度检测部70以及映射图存储部80这两者的结构中,在通过温度检测部70而检测的逆变器40、电动机m的线圈c和电动机m中的至少任一者的环境温度、以及通过存储于映射图存储部80的用于推定温度的映射图而推定的逆变器40、电动机m的线圈c和电动机m中的至少任一者的温度中的任一温度达到基准温度(阈值)的情况下,控制部50也可以从第1通电模式切换至第2通电模式来控制电动机m。此外,在这种情况下,也可以从第2通电模式切换至第1通电模式。
[0058]
在上述实施方式中,说明了第2通电模式中的向电动机m通电的通电电流大于第1通电模式中的向电动机m通电的通电电流,第2通电模式中的对电动机m的通电电流的通电时间小于第1通电模式中的对电动机m的通电电流的通电时间,但第2通电模式中的向电动机m通电的通电电流也可以等于、或小于第1通电模式中的向电动机m通电的通电电流。此外,第2通电模式中的对电动机m的通电电流的通电时间也可以等于、或大于第1通电模式中的对电动机m的通电电流的通电时间。
[0059]
在上述实施方式中,说明了第2通电状态是3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh成为闭状态的状态,且3组桥臂部a中的剩下的两组桥臂部a中的一组桥臂部a的高压侧开关元件qh也成为闭状态的状态,但第2通电状态也可以是仅有3组桥臂部a中的
任一组桥臂部a的高压侧开关元件qh成为闭状态的状态。在这种情况下,电流流经与上述一组桥臂部a的高压侧开关元件qh并联设置的二极管即可。
[0060]
在上述实施方式中,说明了第4通电状态是3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh成为闭状态的状态,且3组桥臂部a中的剩下的两组桥臂部a中的另一组桥臂部a的高压侧开关元件qh也成为闭状态,但第4通电状态也可以是仅有3组桥臂部a中的任一组桥臂部a的高压侧开关元件qh成为闭状态的状态。在这种情况下,电流流经与上述另一组桥臂部a的高压侧开关元件qh并联设置的二极管即可。
[0061]
在上述实施方式中,说明了使用n
‑
mosfet来构成高压侧开关元件qh以及低压侧开关元件ql,但也可以使用p
‑
mosfet来构成高压侧开关元件qh以及低压侧开关元件ql中的至少任一者。
[0062]
本发明可以用于通过无刷电动机的驱动力来控制内燃机的阀的开闭时期的阀正时控制装置。符号说明
[0063]
1:曲轴2:第1电源线3:第2电源线7:进气凸轮轴(凸轮轴)10:驱动壳体(驱动侧旋转体)20:内部转子(从动侧旋转体)30:相位设定机构40:逆变器50:控制部60:指令信息获取部70:温度检测部80:映射图存储部100:阀正时控制装置a:桥臂部a1:第1桥臂部a2:第2桥臂部a3:第3桥臂部c:线圈e:内燃机m:电动机qh:高压侧开关元件ql:低压侧开关元件x:旋转轴心。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

