1.本发明涉及低压伺服电机控制领域,尤其设计一种低压伺服驱动器离散线性自抗扰控制方法。
背景技术:
2.低压伺服电机具有不需要电刷换相、结构简单、运行精度高、供电电压低、体积小、质量轻、工作效率高、以及设计外观和尺寸可以在基本设计情况下进行灵活修改等显著优点。在工业4.0时代的到来,功率器件以及永磁体材料蓬勃发展,低压伺服电机的控制精度得以很大程度上的提高,低压伺服电机开始慢慢在机器人控制、液压装置、航空航天、医疗设备、船舶舰艇设备等领域中得到了广泛的应用,并且由于其不需要电刷进行换相,节省了后期更换电刷的成本,故在一定领域中取代了低压有刷电机的占比。然而由于没有电刷的存在,需要控制器对电机进行电子换相,低压伺服电机是一个多变量、强耦合、非线性和变参数的复杂被控对象,为了使低压伺服电机的工作精度高,抗外部干扰能力强,具有更好的动态性能,必须对其采用一些特定的算法及进行控制。
3.低压伺服电机的控制策略主要有方波控制和矢量控制,方波控制由于其控制方案会造成转矩波动大、控制精度低等影响。故在高精尖控制工况下一般使用矢量控制。低压伺服电机的控制方案主要有:电流环(转矩控制)、速度环控制和位置环三种。其中速度环和位置环内一般都嵌套一个电流环进行控制。针对于三环的控制算法得到了广泛的研究。现在常用的控制算法:传统pid控制、滑膜变结构控制、基于模型的自适应控制、模型预测控制、模糊控制、自抗扰控制等。在工业领域由于pid控制对模型所需信息量的内容少,还是得到应用工程师的广泛使用。自抗扰控制是由中科院韩京清研究员提出的一种不基于模型的控制,自抗扰控制可以看作是传统pid控制的延续和发展,通过观测器的概念将系统的内部参数扰动和外部环境扰动一同视为总扰动的概念,通过观测器对总扰动进行观测和补偿。但是由于其所提出的自抗扰控制器是一种非线性控制器,所以其中非线性函数的调优以及控制器参数的调优还是不被大多数应用工程师所理解。高志强老师在2003年提出了将非线性的自抗扰控制器通过带宽的概念转变为一种线性自抗扰控制器,器控制器的调优参数和带宽概念进行结合将控制器的调优参数减少为4个参数并且控制器的带宽和观测器的带宽以比例方式建立了联系。这种方法可以被应用工程师理解,并且取得比pid更好的控制效果。
技术实现要素:
4.为了克服现有技术的不足,本发明提供一种低压伺服离散线性自抗扰控制方法,在电流环和速度环设计离散线性自抗扰控制器代替传统的pid控制对于电机进行控制,并对于速度环和电流环的控制器参数进行参数整定,将通过参数辨识,辨识得到的参数融入控制器的参数中用于确定补偿因子的大致范围,从而提高离散线性自抗扰控制器的控制精度。
5.为了解决以上的技术问题,本发明是按照以下方式实现的:
6.一种低压伺服离散线性自抗扰控制方法,所述方法包括以下步骤:
7.步骤1)确定电流环和速度环被控对象的阶次,确定阶次由电流的微分方程和运动方程进性确定,交直轴电流的微分方程为:
[0008][0009][0010]
上式中i
d
、i
q
为交直轴电流值,r
s
为电机电阻值,l
d
、l
q
为交直轴电感值,ω
e
为电机转速值,ψ
f
为永磁体磁链值;
[0011]
运动方程为:
[0012][0013]
上式中n
p
为电机的极对数,t
e
为电机的电磁转矩,t
l
为电机的负载转矩,j为电机的转动惯量,l
md
、l
mq
为交直轴电枢反应电感;
[0014]
由(1.1)~(1.3)可知,电流环和速度环的被动对象的阶数为1,根据自抗扰控制器的设计规则,扩张观测器的阶数需要在被控对象阶数的基础上增加1,故扩张观测器的阶数为2阶;
[0015]
步骤2)将电流环的微分方程和电机的运动方程改写为输入加扰动的形式,由于采用的是i
d
=0的控制策略,故在分析电流环的时候只对交轴电流进行分析,不再对直轴电流进行分析,将交轴电流的微分方程改写为:
[0016][0017]
上式中可以视为交轴电流环的总扰动,它由电阻、电感、永磁体磁链变化和外部扰动组成;
[0018]
将运动方程改写为:
[0019][0020]
上式中f
ω
为速度环的总扰动,由内部参数改变和外部负载转矩变化引起的;
[0021]
步骤3)设计电流环连续线性自抗扰控制器,首先对电流环进行分析,电流环的输入为交轴电流的参考值,输出为交轴电压的控制值,记状态变量则式(1.4)表示为以下状态方程的形式:
[0022][0023]
利用luenberger的设计原则来设计线性状态观测器来观测扰动量和状态变量,状态观测器的方程为:
[0024][0025]
上式中上式中分别表示状态变量分别表示状态变量表示观测器的增益值,为观测器误差,则电流环线性扩张观测器写为:
[0026][0027]
上式中上式中
[0028]
步骤4)设计速度环的连续线性自抗扰控制器,速度环的线性扩张观测器表示为:
[0029][0030]
上式中状态变量矩阵z
ω
=[z
1_ω
,z
2_ω
]
t
,状态矩阵观测器增益矩阵l
ω
=[l
1_ω
,l
2_ω
]
t
,输出矩阵c
ω
=[1,0],输入矩阵b
ω
=[b
ω
',0]
t
,u
c_ω
=[u
o_ω
,y
ω
]
t
[0031]
步骤5)设计速度环的跟踪微分器,由于电流环希望电流值随电流的参考值进行快速的变化,故电流环不需要跟踪微分器;速度环由于惯性作用,若不使用跟踪微分器进行过渡过程安排,速度环系统会出现超调等不好的动态过程,对于过渡过程采用一阶惯性环节作为过渡过程的安排,一阶惯性环节的表达式为:
[0032][0033]
同时得到经过惯性环节输出与输入之间的关系式为:
[0034][0035]
步骤6)设计线性扩张观测器的增益矩阵,将观测器的增益和控制实际中常用的带宽进行联系,写出式(1.8)系统的特征方程为:
[0036][0037]
将特征式展开,将其极点放在同一位置,该位置即为观测器的带宽值,得到观测器的增益矩阵为:
[0038][0039]
步骤7)设计速度环和电流环连续线性自抗扰控制器的控制律,对于一阶被控对象,采用单p控制即可,则电流环和速度环的控制律为:
[0040][0041]
u
ω
=k
ω
(r
ω
‑
y
ω
)
ꢀꢀꢀ
(1.15)
[0042]
上式中k
ω
为控制律的增益,r
ω
为速度环和电流环的参考信号;
[0043]
步骤8)将连续线性自抗扰控制器离散化,连续线性自抗扰控制器中的控制律部分只是对线性扩张观测器的输出信号进行放大,故控制律部分不需要进行离散化处理,只需要对连续的线性扩张观测器部分进行离散,采用欧拉离散法对其进行离散,速度环的离散方式和电流环相似,此处仅对电流环的离散过程进行推导,对于状态变量采用以下公式进行微分:
[0044][0045]
上式中为电流环数字控制器所造成的延迟时间,将上式改写为当前时刻较上一时刻的变化:
[0046][0047]
将上式代入连续系统的状态方程得:
[0048][0049]
上式中对应于状态矩阵其表达式为:
[0050][0051]
其中i为单位矩阵,对应的是输入矩阵其表达式为:
[0052][0053]
等于连续控制器中的输出矩阵为零矩阵,同时得到离散线性扩张观测器的表达方程为:
[0054][0055]
上式中的表达式为:
[0056][0057]
其中为离散线性扩张观测器增益矩阵,和连续系统类似写出特征方程为:
[0058][0059]
将其特征根放置在同一极点处,展开后得增益矩阵为:
[0060][0061]
同时得到:
[0062][0063]
相对应的输入矩阵为:
[0064][0065]
相对应的输出矩阵为:
[0066][0067]
相对应的的矩阵表达式为:
[0068][0069]
连续线性扩张观测器的带宽和离散线性扩张观测器的带宽的转化表达式为:
[0070][0071]
步骤9)速度环跟踪微分器的离散化,同样一阶惯性环节采用前向欧拉法进行离散,对于惯性环节进行反拉氏辨识得:
[0072][0073]
由前向欧拉法得:
[0074][0075]
联立上式得:
[0076][0077]
步骤10)将低压伺服电机的转动惯量和电感值进行辨识,作为补偿因子的确定参考,通过辨识算法得到的转动惯量值和电感值,通过公式:
[0078]
[0079][0080]
确定电流环和速度环的补偿因子的基数,因为线性自抗扰控制器中适当增大补偿因子的值可以提高系统的抗干扰性和动态性能,故对于补偿因子乘以一个增益因子a,得到实际控制器中补偿因子为:
[0081][0082]
b
0_ω
'=a
ω
*b
0_ω
ꢀꢀꢀ
(1.36)
[0083]
步骤11)使用稳态图的方式对电流环和速度环的控制律带宽ω
c
和观测器带宽ω
o
进行整定,同时对两个系统需要留出足够的幅值裕度和相位裕度。
[0084]
本发明的有益效果为:在电流环和速度环设计离散线性自抗扰控制器代替传统的pid控制对于电机进行控制,并对于速度环和电流环的控制器参数进行参数整定,将通过参数辨识,辨识得到的参数融入控制器的参数中用于确定补偿因子的大致范围,从而提高离散线性自抗扰控制器的控制精度。
附图说明
[0085]
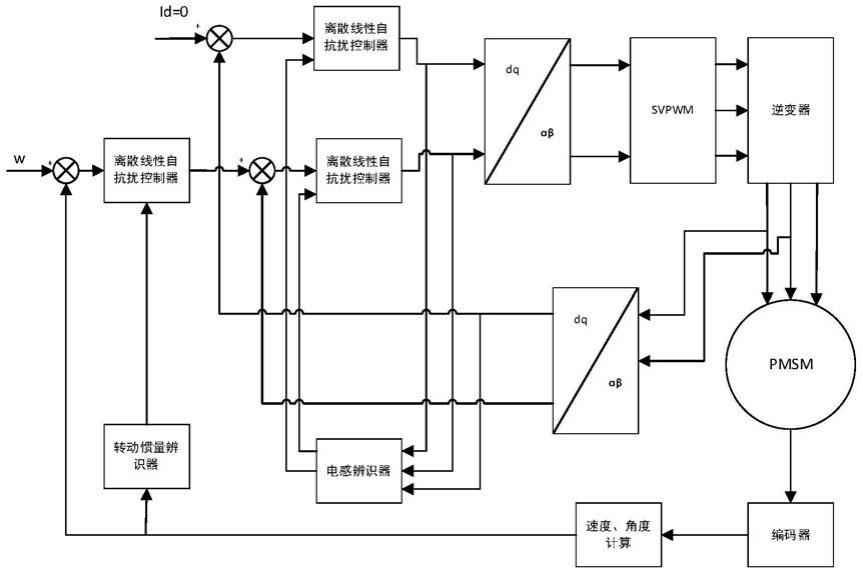
图1为低压伺服控制器的控制框图。
[0086]
图2为电流环线性自抗扰控制器的控制框图。
[0087]
图3为速度环线性自抗扰控制器的控制器框图。
[0088]
图4为一种低压伺服离散线性自抗扰控制方法的流程图。
具体实施方式
[0089]
下面结合附图对本发明进一步详细说明。
[0090]
参照图1
‑
图4,一种低压伺服离散线性自抗扰控制方法,所述方法包括以下步骤:
[0091]
步骤1)确定电流环和速度环被控对象的阶次,确定阶次由电流的微分方程和运动方程进性确定,交直轴电流的微分方程为:
[0092][0093][0094]
上式中i
d
、i
q
为交直轴电流值,r
s
为电机电阻值,l
d
、l
q
为交直轴电感值,ω
e
为电机转速值,ψ
f
为永磁体磁链值;
[0095]
运动方程为:
[0096][0097]
上式中n
p
为电机的极对数,t
e
为电机的电磁转矩,t
l
为电机的负载转矩,j为电机的转动惯量,l
md
、l
mq
为交直轴电枢反应电感;
[0098]
由(1.1)~(1.3)可知,电流环和速度环的被动对象的阶数为1,根据自抗扰控制器
的设计规则,扩张观测器的阶数需要在被控对象阶数的基础上增加1,故扩张观测器的阶数为2阶;
[0099]
步骤2)将电流环的微分方程和电机的运动方程改写为输入加扰动的形式,由于采用的是i
d
=0的控制策略,故在分析电流环的时候只对交轴电流进行分析,不再对直轴电流进行分析,将交轴电流的微分方程改写为:
[0100][0101]
上式中可以视为交轴电流环的总扰动,它由电阻、电感、永磁体磁链变化和外部扰动组成;
[0102]
将运动方程改写为:
[0103][0104]
上式中f
ω
为速度环的总扰动,由内部参数改变和外部负载转矩变化引起的;
[0105]
步骤3)设计电流环连续线性自抗扰控制器,首先对电流环进行分析,电流环的输入为交轴电流的参考值,输出为交轴电压的控制值,记状态变量则式(1.4)表示为以下状态方程的形式:
[0106][0107]
利用luenberger的设计原则来设计线性状态观测器来观测扰动量和状态变量,状态观测器的方程为:
[0108][0109]
上式中上式中分别表示状态变量分别表示状态变量表示观测器的增益值,为观测器误差,则电流环线性扩张观测器写为:
[0110][0111]
上式中上式中
[0112]
步骤4)设计速度环的连续线性自抗扰控制器,速度环的线性扩张观测器表示为:
[0113]
[0114]
上式中状态变量矩阵z
ω
=[z
1_ω
,z
2_ω
]
t
,状态矩阵观测器增益矩阵l
ω
=[l
1_ω
,l
2_ω
]
t
,输出矩阵c
ω
=[1,0],输入矩阵b
ω
=[b
ω
',0]
t
,u
c_ω
=[u
o_ω
,y
ω
]
t
[0115]
步骤5)设计速度环的跟踪微分器,由于电流环希望电流值随电流的参考值进行快速的变化,故电流环不需要跟踪微分器;速度环由于惯性作用,若不使用跟踪微分器进行过渡过程安排,速度环系统会出现超调等不好的动态过程,对于过渡过程采用一阶惯性环节作为过渡过程的安排,一阶惯性环节的表达式为:
[0116][0117]
同时得到经过惯性环节输出与输入之间的关系式为:
[0118][0119]
步骤6)设计线性扩张观测器的增益矩阵,将观测器的增益和控制实际中常用的带宽进行联系,写出式(1.8)系统的特征方程为:
[0120][0121]
将特征式展开,将其极点放在同一位置,该位置即为观测器的带宽值,得到观测器的增益矩阵为:
[0122][0123]
步骤7)设计速度环和电流环连续线性自抗扰控制器的控制律,对于一阶被控对象,采用单p控制即可,则电流环和速度环的控制律为:
[0124][0125]
u
ω
=k
ω
(r
ω
‑
y
ω
)(1.51)
[0126]
上式中k
ω
为控制律的增益,r
ω
为速度环和电流环的参考信号;
[0127]
步骤8)将连续线性自抗扰控制器离散化,连续线性自抗扰控制器中的控制律部分只是对线性扩张观测器的输出信号进行放大,故控制律部分不需要进行离散化处理,只需要对连续的线性扩张观测器部分进行离散,采用欧拉离散法对其进行离散,速度环的离散方式和电流环相似,此处仅对电流环的离散过程进行推导,对于状态变量采用以下公式进行微分:
[0128][0129]
上式中为电流环数字控制器所造成的延迟时间,将上式改写为当前时刻较上一时刻的变化:
[0130][0131]
将上式代入连续系统的状态方程得:
[0132][0133]
上式中对应于状态矩阵其表达式为:
[0134][0135]
其中i为单位矩阵,对应的是输入矩阵其表达式为:
[0136][0137]
等于连续控制器中的输出矩阵为零矩阵,同时得到离散线性扩张观测器的表达方程为:
[0138][0139]
上式中的表达式为:
[0140][0141]
其中为离散线性扩张观测器增益矩阵,和连续系统类似写出特征方程为:
[0142][0143]
将其特征根放置在同一极点处,展开后得增益矩阵为:
[0144][0145]
同时得到:
[0146][0147]
相对应的输入矩阵为:
[0148][0149]
相对应的输出矩阵为:
[0150][0151]
相对应的的矩阵表达式为:
[0152][0153]
连续线性扩张观测器的带宽和离散线性扩张观测器的带宽的转化表达式为:
[0154][0155]
步骤9)速度环跟踪微分器的离散化,同样一阶惯性环节采用前向欧拉法进行离散,对于惯性环节进行反拉氏辨识得:
[0156][0157]
由前向欧拉法得:
[0158][0159]
联立上式得:
[0160][0161]
步骤10)将低压伺服电机的转动惯量和电感值进行辨识,作为补偿因子的确定参考,通过辨识算法得到的转动惯量值和电感值,通过公式:
[0162][0163][0164]
确定电流环和速度环的补偿因子的基数,因为线性自抗扰控制器中适当增大补偿因子的值可以提高系统的抗干扰性和动态性能,故对于补偿因子乘以一个增益因子a,得到实际控制器中补偿因子为:
[0165][0166]
b
0_ω
'=a
ω
*b
0_ω
ꢀꢀꢀ
(1.72)
[0167]
步骤11)使用稳态图的方式对电流环和速度环的控制律带宽ω
c
和观测器带宽ω
o
进行整定,同时对两个系统需要留出足够的幅值裕度和相位裕度。
[0168]
本实施例中,通过上位机软件给定速度环的参考输入,将给定输入通入离散一阶惯性环节,调整惯性环节中的时间常数τ,而采样时间是速度环的控制周期,即t
s
=0.001,其中时间常数的值越大对于超调的抑制能力越强,但同时系统所需的调节时间越长。
[0169]
首先使用pid控制器使得低压伺服电机工作在匀速情况下,此时对于电机的电感参数和转动惯量参数进行辨识,通过辨识之后的参数确定速度环和电流环补偿因子的基
数,同时将基数乘以一个比例因子得到控制器的补偿因子。
[0170]
通过运算放大电路的输出值采样电机的直交轴电流值,作为离散线性扩展观测器的输入,观测器的还有一个输入来自于控制律的输出经过限幅函数得到的控制量。
[0171]
设计离散线性自抗扰控制器的参数。首先考虑线性自抗扰器的传递函数,通过状态方程将线性自抗扰控制器化为传递函数的形式,同时考虑数字控制器造成延时所产生的延时,将其化为传递函数的形式,同时写出被控对象的传递函数。列写出整个系统的闭环传递函数,单独列写其闭环特征方程,编写迭代程序,对不同控制律带宽以及控制律与观测器带宽之间的比例因子进行组合代入特征方程判断其特征根是否处于左半平面。
[0172]
将得到的控制律带宽以及控制律与观测器带宽之间的比例因子绘制成图,确定稳定区域,在稳定区域中通过性能评价函数得到符合要求的控制器参数,其中比例因子的最大值不能超过10。
[0173]
通过公式(1.29)得到电流环离散线性扩张观测器的带宽,将其代入电流环控制器,查看实际工作情况寻找最优解。
[0174]
在低压伺服控制器中一般接受来自于增量式编码器、旋转编码器、绝对值式编码器的输出值,通过控制器对于信号进行处理,判断出低压伺服电机的实时速度。将其作为速度环离散线性扩张观测器的输入,还有一个输入和电流环相同采用限幅之后的控制量作为其输入。
[0175]
对于速度环采用整定方法对其进行整定,使得低压伺服电机可以在速度环下稳定运行。
[0176]
上述实施例仅代表了本发明的一种实施方式,并不能理解为对本发明范围的限制。应当指出的是在本领域的普通技术人员,在不脱离本发明构思的前提下,还可以做出若干种变形设计,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

