1.本公开涉及一种车辆用灯具及车辆。
背景技术:
2.目前,在各国积极进行汽车的自动驾驶技术的研究,在各国探讨用于车辆(以下“车辆”是指汽车。)能够以自动驾驶模式在公共道路上行驶的立法。在此,在自动驾驶模式下,车辆系统自动控制车辆的行驶。具体而言,在自动驾驶模式下,车辆系统基于从相机、雷达(例如激光雷达或毫米波雷达)等传感器得到的表示车辆的周边环境的信息(周边环境信息)来自动进行转向控制(车辆的行进方向的控制)、制动控制及加速控制(车辆的制动、加速/减速的控制)中的至少一个。另一方面,在以下叙述的手动驾驶模式下,驾驶者像许多传统型的车辆那样控制车辆的行驶。具体而言,在手动驾驶模式下,根据驾驶者的操作(转向操作、制动操作、加速操作)来控制车辆的行驶,车辆系统不自动进行转向控制、制动控制及加速控制。需要说明的是,车辆的驾驶模式不是仅存在于一部分的车辆的概念,而是存在于也包括没有自动驾驶功能的传统型的车辆在内的所有车辆中的概念,例如,根据车辆控制方法等进行分类。
3.这样,预想将来在公共道路上以自动驾驶模式行驶中的车辆(以下适当地称为“自动驾驶汽车”。)和以手动驾驶模式行驶中的车辆(以下适当地称为“手动驾驶汽车”。)混合存在。
4.作为自动驾驶技术的一例,在专利文献1中公开有一种后续车自动追随前行车行驶的自动追随行驶系统。在该自动追随行驶系统中,前行车和后续车分别具备照明系统,用于防止在前行车和后续车之间挤进其它车的文字信息显示于前行车的照明系统,并且表示作为自动追随行驶的意思的文字信息显示于后续车的照明系统。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开平9
‑
277887号公报
技术实现要素:
8.发明所要解决的问题
9.然而,在自动驾驶技术的发展中,需要飞跃性增大车辆的周边环境的检测精度。在这一点上,将毫米波雷达等雷达作为获取车辆的周边环境信息的传感器之一搭载于车辆上。搭载于车辆的雷达接收从雷达辐射后被存在于车辆的外部的对象物反射的反射电波。之后,雷达能够基于辐射电波和反射电波来测定该对象物的位置(距离和方向)、对象物与本车辆之间的相对速度。
10.使用了雷达的周边环境的检测精度严重依赖被其它车辆等对象物反射的反射电波的强度。例如,在通过雷达检测到的对象物是车辆的情况下,在被车辆反射的反射电波的强度小时,s/n比(信噪比)恶化,因此,可能无法准确检测车辆的位置和相对速度。这样,为
了提高使用雷达检测周边环境的检测精度,考虑提高作为检测对象物的车辆的雷达电波反射率。
11.本公开的目的在于,提供一种能够提高来自其它车辆的雷达电波的反射率的车辆用灯具及车辆。
12.用于解决问题的技术方案
13.本公开的一方案的车辆用灯具具备构成为提高雷达电波反射率的部件。
14.根据上述结构,能够提供能够提高雷达电波反射率(即,来自其它车辆的雷达电波的反射率)的车辆用灯具。
15.另外,也可以是,所述车辆用灯具还具备:外壳;外罩,其覆盖所述外壳的开口;照明单元,其配置于由所述外壳和所述外罩形成的空间内。所述部件也可以是以与所述外壳对置的方式配置的至少一个金属部件。
16.根据上述结构,因为至少一个金属部件以与外壳对置的方式配置,所以能够通过该金属部件提高来自其它车辆的雷达电波的反射率。
17.另外,也可以是,所述金属部件配置于所述空间内。
18.根据上述结构,因为金属部件配置于空间内,所以能够抑制车辆用灯具的外形尺寸大型化。
19.另外,也可以是,所述金属部件作为隅角立方反射器而被构成。
20.根据上述结构,因为金属部件被构成为隅角立方反射器,所以金属部件的雷达反射截面积(radar cross
‑
section:rcs)提高。这样,能够提高车辆用灯具的雷达电波反射率。
21.另外,也可以是,所述车辆用灯具具备:
22.外壳;
23.外罩,其覆盖所述外壳的开口;
24.照明单元,其配置于由所述外壳和所述外罩形成的空间内。
25.所述部件也可以是所述外罩及所述外壳中的至少一方。所述外罩及所述外壳中的至少一方的厚度d由下式规定。
26.d=1/4
×
λ/ε
r1/2
×
(2n 1)
27.在此,λ为雷达电波的波长,ε
r
为所述外罩及所述外壳中的至少一方的相对介电常数,n为零以上的整数。
28.根据上述结构,因为将外罩及外壳中的至少一方(下称反射部件。)的厚度d设定为d=1/4
×
λ/ε
r1/2
×
(2n 1),所以由反射部件的一面反射的电波和由反射部件的另一面反射的电波彼此相互加强。这样,外罩及外壳中的至少一方能够提高相对于从其它车辆辐射的波长λ的雷达电波的反射率。因此,能够提供能够提高相对于波长λ的雷达电波的反射率的车辆用灯具。
29.另外,也可以是,在所述雷达电波的波长λ为3.92mm、所述相对介电常数为2.7的情况下,将所述厚度d设定为0.59mm
×
(2n 1)。
30.根据上述结构,在雷达电波的波长λ=3.92mm(频率f=76.5ghz)时,将相对介电常数为2.7的外罩及外壳中的至少一方的厚度d设定为0.59mm
×
(2n 1)的值。这样,外罩及外壳中的至少一方能够提高相对于从其它车辆辐射的频率f=76.5ghz的毫米波雷达的反射
率。因此,能够提供能够提高相对于该毫米波雷达的反射率的车辆用灯具。
31.也可以提供具备上述车辆用灯具的车辆。
32.根据以上说明,能够提供能够提高雷达电波反射率的车辆。
33.发明效果
34.根据本公开,能够提供一种能够提高来自其它车辆的雷达电波的反射率的车辆用灯具及车辆。
附图说明
35.图1表示具备本发明实施方式(以下称为本实施方式。)的车辆系统的车辆的示意图。
36.图2是表示本实施方式的车辆系统的框图。
37.图3是表示左前传感系统的框图。
38.图4是示意性表示本实施方式的左前灯具的剖视图。
39.图5是示意性表示变形例的左前灯具的剖视图。
40.图6是示意性表示隅角立方反射器的图。
41.图7是表示本车辆和辐射毫米波的其它车辆的图。
42.图8a是表示外壳的一部分的剖视图。
43.图8b是表示外罩的一部分的剖视图。
具体实施方式
44.以下,参照附图对本公开的实施方式(以下简称为“本实施方式”。)进行说明。需要说明的是,为了便于说明,对具有与在本实施方式的说明中已说明的部件相同的参照编号的部件省略其说明。另外,为了便于说明,本附图所示的各部件的尺寸有时与实际的各部件的尺寸不同。
45.另外,在本实施方式的说明中,为了便于说明,有时适当地提及“左右方向”、“前后方向”、“上下方向”。这些方向是对图1所示的车辆1设定的相对的方向。在此,“前后方向”是包括“前方向”及“后方向”的方向。“左右方向”是包括“左方向”及“右方向”的方向。“上下方向”是包括“上方向”及“下方向”的方向。需要说明的是,在图1中未示出上下方向,但上下方向是与前后方向及左右方向垂直的方向。
46.首先,参照图1及图2对本实施方式的车辆1及车辆系统2进行说明。图1是表示具备车辆系统2的车辆1的俯视图的示意图。图2是表示车辆系统2的框图。
47.如图1所示,车辆1是能够在自动驾驶模式下行驶的车辆(汽车),具备车辆系统2、左前灯具7a、右前灯具7b、左后灯具7c以及右后灯具7d。需要说明的是,在本实施方式中,将车辆1作为机动四轮车进行说明,但车辆1也可以是机动二轮车或机动三轮车。
48.如图1及图2所示,车辆系统2至少具备车辆控制部3、左前传感系统4a(以下简称为“传感系统4a”。)、右前传感系统4b(以下简称为“传感系统4b”。)、左后传感系统4c(以下,简称为“传感系统4c”。)、以及右后传感系统4d(以下简称为“传感系统4d”。)。
49.而且,车辆系统2具备传感器5、hmi(human machine interface:人机接口)8、gps(global positioning system:全球定位系统)9、无线通信部10以及存储装置11。另外,车
辆系统2具备转向致动器12、转向装置13、制动致动器14、制动装置15、加速致动器16以及加速装置17。
50.车辆控制部3构成为控制车辆1的行驶。车辆控制部3例如由至少一个电子控制单元(ecu:electronic control unit:电子控制单元)构成。电子控制单元包括计算机系统(例如soc(system on a chip:片上系统)等)和电子电路,上述计算机系统包括一个以上的处理器和一个以上的存储器,上述电子电路由晶体管等有源元件及无源元件构成。处理器例如包括cpu(central processing unit:中央处理器)、mpu(micro processing unit:微处理单元)、gpu(graphics processing unit:图形处理单元)及tpu(tensor processing unit:张量处理单元)中的至少一个。cpu也可以由多个cpu核心构成。gpu也可以由多个gpu核心构成。存储器包括rom(read only memory:只读存储器)和ram(random access memory:随机存取存储器)。也可以在rom中存储车辆控制程序。例如,车辆控制程序也可以包括自动驾驶用的人工智能(ai)程序。ai程序是由使用了多层神经网络的有教学或无教学的机器学习(特别是深度学习)构建的程序(学习完成模型)。也可以在ram中临时存储表示车辆控制程序、车辆控制数据和/或车辆的周边环境的周边环境信息。处理器构成为在ram上展开从存储于rom的各种车辆控制程序指定的程序,并通过与ram的协作来执行各种处理。另外,计算机系统也可以由asic(application specific integrated circuit:专用集成电路)或fpga(field
‑
programmable gate array:现场可编程门阵列)等非诺伊曼型计算机构成。而且,计算机系统也可以由诺伊曼型计算机和非诺伊曼型计算机的组合构成。
51.传感系统4a~4d分别构成为检测车辆1的周边环境。在本实施方式的说明中,传感系统4a~4d分别具备相同的构成要件。因此,以下,参照图3对传感系统4a进行说明。图3是表示传感系统4a的框图。
52.如图3所示,传感系统4a具备控制部40a、照明单元42a、相机43a、lidar(light detection and ranging:光探测和测距)单元44a以及毫米波雷达45a。控制部40a、照明单元42a、相机43a、lidar单元44a以及毫米波雷达45a配置于由图1所示的左前灯具7a的外壳24a和透光性的外罩22a形成的空间sa内。外罩22a构成为覆盖外壳24a的开口。控制部40a也可以配置于空间sa以外的车辆1的规定的位置。例如,控制部40a也可以与车辆控制部3一体构成。
53.控制部40a构成为分别控制照明单元42a、相机43a、lidar单元44a以及毫米波雷达45a的动作。在这一点上,控制部40a作为照明单元控制部420a、相机控制部430a、lidar单元控制部440a以及毫米波雷达控制部450a发挥作用。
54.控制部40a由至少一个电子控制单元(ecu)构成。电子控制单元包括计算机系统(例如soc等)和电子电路,上述计算机系统包括一个以上的处理器和一个以上的存储器,上述电子电路由晶体管等有源元件及无源元件构成。处理器包括cpu、mpu、gpu及tpu中的至少一个。存储器包括rom和ram。另外,计算机系统也可以由asic或fpga等非诺伊曼型计算机构成。
55.照明单元42a构成为通过朝向车辆1的外部(前方)射出光来形成配光图案。照明单元42a具有射出光的光源和光学系统。光源例如也可以由以矩阵状(例如n行
×
m列,n>1,m>1)排列的多个发光元件构成。发光元件例如是led(light emitting diode:发光二极管)、ld(laser diode:激光二极管)或有机el元件。光学系统也可以包括构成为将从光源射
出的光朝向照明单元42a的前方反射的反射器、和构成为将从光源直接射出的光或由反射器反射的光折射的透镜中的至少一方。
56.照明单元控制部420a构成为控制照明单元42a,以使照明单元42a将规定的配光图案朝向车辆1的前方区域射出。例如,照明单元控制部420a也可以根据车辆1的驾驶模式变更从照明单元42a射出的配光图案。
57.相机43a构成为检测车辆1的周边环境。特别是相机43a构成为在获取到表示车辆1的周边环境的图像数据后将该图像数据向相机控制部430a发送。相机控制部430a也可以基于发送来的图像数据来特定周边环境信息。在此,周边环境信息也可以包含与存在于车辆1的外部的对象物有关的信息。例如,周边环境信息也可以包含与存在于车辆1的外部的对象物的属性有关的信息和与对象物相对于车辆1的距离、方向和/或位置有关的信息。相机43a例如包括ccd(charge
‑
coupled device:电荷耦合元件)或cmos(互补型mos:metal oxide semiconductor:互补金属氧化物半导体)等拍摄元件。
58.lidar单元44a构成为检测车辆1的周边环境。特别是,lidar单元44a构成为在获取到表示车辆1的周边环境的点群数据后将该点群数据向lidar单元控制部440a发送。lidar单元控制部440a也可以基于发送来的点群数据来特定周边环境信息。
59.更具体而言,lidar单元44a获取与激光的各射出角度(水平角度θ、垂直角度φ)的激光(光脉冲)的飞行时间(tof:time of flight)δt1有关的信息。lidar单元44a能够基于与各射出角度的飞行时间δt1有关的信息来获取与各射出角度的lidar单元44a和存在于车辆1的外部的物体之间的距离d有关的信息。
60.毫米波雷达45a构成为检测表示车辆1的周边环境的雷达数据。特别是,毫米波雷达45a构成为在获取到雷达数据后将该雷达数据向毫米波雷达控制部450a发送。毫米波雷达控制部450a构成为基于雷达数据来获取周边环境信息。周边环境信息也可以包含与存在于车辆1的外部的对象物有关的信息。周边环境信息也可以包含例如与对象物相对于车辆1的位置和方向有关的信息和与对象物相对于车辆1的相对速度有关的信息。
61.例如,毫米波雷达45a能够通过脉冲调制方式、fmcw(frequency moduleted continuous wave,调频连续波)方式或2频率cw方式来获取毫米波雷达45a和存在于车辆1的外部的物体之间的距离及方向。在使用脉冲调制方式的情况下,毫米波雷达45a能够在获取到与毫米波的飞行时间δt2有关的信息后基于与飞行时间δt2有关的信息来获取与毫米波雷达45a和存在于车辆1的外部的物体之间的距离d有关的信息。另外,毫米波雷达45a能够基于由一方的接收天线接收到的毫米波(接收波)的相位和由与一方的接收天线相邻的另一方的接收天线接收到的毫米波(接收波)的相位之间的相位差来获取与物体相对于车辆1的方向有关的信息。另外,毫米波雷达45a能够基于从发送天线辐射的发送波的频率f0和由接收天线接收到的接收波的频率f1来获取与物体相对于毫米波雷达45a的相对速度v有关的信息。
62.另外,传感系统4b~4d也同样地分别具备控制部、照明单元、相机、lidar单元以及毫米波雷达。特别是,传感系统4b的这些装置配置于由图1所示的右前灯具7b的外壳24b和透光性的外罩22b形成的空间sb内。传感系统4c的这些装置配置于由左后灯具7c的外壳24c和透光性的外罩22c形成的空间sc内。传感系统4d的这些装置配置于由右后灯具7d的外壳24d和透光性的外罩22d形成的空间sd内。
63.回到图2,传感器5也可以具有加速度传感器、速度传感器及陀螺仪传感器等。传感器5构成为检测车辆1的行驶状态并将表示车辆1的行驶状态的行驶状态信息向车辆控制部3输出。另外,传感器5也可以具有检测车辆1外部的外部空气温度的外部空气温度传感器。
64.hmi8由接受来自驾驶者的输入操作的输入部和朝向驾驶者输出行驶信息等的输出部构成。输入部包括方向盘、加速踏板、制动踏板、以及切换车辆1的驾驶模式的驾驶模式切换开关等。输出部是显示各种行驶信息的显示器(例如head up display:抬头显示器(hud)等)。gps9构成为获取车辆1的当前位置信息并将该取得到的当前位置信息向车辆控制部3输出。
65.无线通信部10构成为从其它车接收与在车辆1的周围的其它车有关的信息,并且将与车辆1有关的信息向其它车发送(车车间通信)。另外,无线通信部10构成为从信号机或标灯等基础设施设备接收基础设施信息,并且将车辆1的行驶信息向基础设施设备发送(路车间通信)。另外,无线通信部10构成为从行人携带的便携式电子设备(智能手机、平板电脑、可穿戴设备等)接收与行人有关的信息,并且将车辆1的本车行驶信息向便携式电子设备发送(人车间通信)。车辆1可以与其它车辆、基础设施设备或者便携式电子设备通过ad
‑
hoc模式直接通信,也可以经由互联网等通信网络进行通信。
66.存储装置11是硬盘驱动器(hdd)或ssd(solid state drive:固态驱动器)等外部存储装置。也可以在存储装置11中存储二维或三维的地图信息和/或车辆控制程序。例如,三维地图信息也可以由3d映射数据(点群数据)构成。存储装置11构成为根据来自车辆控制部3的请求将地图信息或车辆控制程序向车辆控制部3输出。地图信息或车辆控制程序也可以经由无线通信部10或通信网络更新。
67.在车辆1以自动驾驶模式行驶的情况下,车辆控制部3基于行驶状态信息、周边环境信息、当前位置信息以及地图信息等来自动生成转向控制信号、加速控制信号及制动控制信号中的至少一个。转向致动器12构成为从车辆控制部3接收转向控制信号,并基于接收到的转向控制信号来控制转向装置13。制动致动器14构成为从车辆控制部3接收制动控制信号,并基于接收到的制动控制信号来控制制动装置15。加速致动器16构成为从车辆控制部3接收加速控制信号,并基于接收到的加速控制信号来控制加速装置17。这样,车辆控制部3基于行驶状态信息、周边环境信息、当前位置信息以及地图信息等来自动控制车辆1的行驶。即,在自动驾驶模式下,车辆1的行驶由车辆系统2自动控制。
68.另一方面,在车辆1以手动驾驶模式行驶的情况下,车辆控制部3根据驾驶者对于加速踏板、制动踏板及方向盘的手动操作来生成转向控制信号、加速控制信号及制动控制信号。这样,在手动驾驶模式下,因为通过驾驶者的手动操作来生成转向控制信号、加速控制信号及制动控制信号,所以车辆1的行驶由驾驶者控制。
69.(具备隅角立方反射器的车辆用灯具)
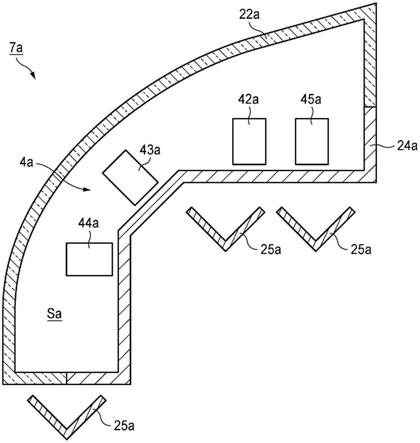
70.接下来,以下,参照图4对搭载有隅角立方反射器(corner cube reflector)25a(以下有时简称为“反射器25a”。)的左前灯具7a进行说明。图4是示意性表示本实施方式的左前灯具7a的剖视图。需要说明的是,在本实施方式中,仅对左前灯具7a进行说明,但右前灯具7b、左后灯具7c及右后灯具7d也同样地搭载一个以上的隅角立方反射器。另外,在图4中图示反射器25a的横剖视图。
71.如图4所示,照明单元42a、相机43a、lidar单元44a及毫米波雷达45a搭载于由外壳
24a和外罩22a形成的空间sa内。搭载这些装置的位置没有特别限制,图4所示的搭载位置仅为一例。另外,多个隅角立方反射器25a以与外壳24a对置的方式配置于空间sa的外侧。反射器25a构成为提高雷达电波反射率。特别是,如图7所示,反射器25a构成为提高相对于从其它车辆1b辐射的毫米波雷达(电波)的反射率。反射器25a例如由金属部件构成。另外,如图6所示,反射器25a也可以构成为一边的长度由l构成为三棱锥。在该情况下,能够通过下式(1)计算反射器25a的雷达反射截面积(rcs)。
72.rcs=πl4/3λ2···
(1)
73.在此,λ为向反射器25a入射的电波的波长。例如,在向反射器25a入射的毫米波的频率为76.5ghz的情况下,波长λ约为3.9mm。在该情况下,在l=0.11m时rcs为10m2。
74.根据本实施方式,因为反射器25a搭载于左前灯具7a,所以能够提供能够提高从其它车辆辐射的雷达电波的反射率的左前灯具7a。特别是,能够通过反射器25a提高左前灯具7a的rcs。因此,如图7所示,容易通过其它车辆1b的毫米波雷达检测到车辆1。这样,因为容易从车辆1的周围的其它车辆检测到车辆1,所以能够适宜地防止其它车辆无法检测到车辆1这样的状况。需要说明的是,在本实施方式中,作为一例,三个反射器25a搭载于左前灯具7a,但搭载于左前灯具7a的反射器25a的个数没有特别限制。例如,也可以将一个反射器25a搭载于左前灯具7a。另外,也可以将多个反射器25a在规定的方向上排列。
75.接下来,以下,参照图5对变形例的左前灯具70a进行说明。图5是示意性表示变形例的左前灯具70a的剖视图。左前灯具70a在反射器25a的搭载位置这一点上主要与图4所示的左前灯具7a不同。如图5所示,多个反射器25a以与外壳24a及外罩22a对置的方式配置于空间sa内。这样,因为反射器25a配置于空间sa内,所以能够抑制左前灯具7a的外形尺寸大型化。
76.需要说明的是,在本实施方式及变形例中,作为构成为提高来自其它车辆的雷达电波反射率的部件的一例,对反射器25a进行了说明,但该部件不限于反射器25a。例如,也可以取代反射器25a而将平板金属部件搭载于左前灯具7a。在该情况下,也能够提高左前灯具7a的rcs。而且,也可以将配置于空间sa内的光学部件的一部分作为隅角立方反射器而构成。而且,也可以将外罩22a和/或外壳24a的一部分作为隅角立方反射器而构成。
77.(用于提高雷达电波反射率的车辆用灯具的另一例)
78.接下来,以下参照图8a对用于提高雷达电波反射率的车辆用灯具(特别是左前灯具7a)的另一例进行说明。图8a是表示外壳24a的一部分的剖视图。在本例中,代替将提高雷达电波反射率的反射器25a搭载于左前灯具7a,而是将外壳24a的厚度设定为被下式(2)规定的厚度d1。
79.d1=1/4
×
λ/ε
r11/2
×
(2n 1)
···
(2)
80.在此,λ为向外壳24a入射的雷达电波的波长,ε
r1
为外壳24a的相对介电常数,n为零以上的整数。
81.这样,因为将外壳24a的厚度设定为被上述式(2)规定的厚度d1,所以如图8a所示,由外壳24a的第一面242a反射的反射电波a1和由位于外壳24a的与第一面242a相反侧的第二面243a反射的反射电波a2彼此相互加强。具体而言,因为反射电波a1和反射电波a2之间的相位差δθ为2π
×
m(m为零以上的整数),所以反射电波a1和反射电波a2彼此相互加强。这样,外壳24a能够提高相对于从其它车辆辐射的雷达电波的反射率。例如,在雷达电波的波
长λ为3.92mm(频率f=76.5ghz)、外壳24a的相对介电常数ε
r1
为2.7的情况下,优选将外壳24a的厚度设定为0.599mm
×
(2n 1)。
82.接下来,以下,参照图8b对用于提高雷达电波反射率的车辆用灯具(特别是左前灯具7a)的另外的第二例进行说明。图8b是表示外罩22a的一部分的剖视图。在本例中,也同样地代替将提高雷达电波反射率的反射器25a搭载于左前灯具7a,而是将外罩22a的厚度设定为被下式(3)规定的厚度d2。
83.d2=1/4
×
λ/ε
r21/2
×
(2n 1)
···
(3)
84.在此,λ为向外罩22a入射的雷达电波的波长,ε
r2
为外罩22a的相对介电常数,n为零以上的整数。
85.这样,因为将外罩22a的厚度设定为被上述式(3)规定的厚度d2,所以如图8b所示,由外罩22a的第一面222a反射的反射电波a3和由位于外罩22a的与第一面222a相反侧的第二面223a反射的反射电波a4彼此相互加强。具体而言,因为反射电波a3和反射电波a4之间的相位差δθ为2π
×
m(m为零以上的整数),所以反射电波a3和反射电波a4彼此相互加强。这样,外罩22a能够提高相对于从其它车辆辐射的雷达电波的反射率。例如,在雷达电波的波长λ为3.92mm(频率f=76.5ghz)、外罩22a的相对介电常数ε
r2
为2.7的情况下,优选将外罩22a的厚度设定为0.599mm
×
(2n 1)。
86.需要说明的是,在本实施方式中,也可以将外壳24a的厚度设定为由式(2)规定的厚度d1,并且将外罩22a的厚度设定为由式(3)规定的厚度d2。在该情况下,因为将外壳24a和外罩22a双方构成为提高雷达电波反射率,所以能够进一步提高左前灯具7a整体的雷达电波反射率。另外,也可以将外壳24a或外罩22a中的一方的厚度设定为被式(2)或式(3)规定的厚度。在该情况下,也能够提高左前灯具7a整体的雷达电波反射率。另外,也可以在左前灯具7a上设置反射器25a,并且将外壳24a及外罩22a中的至少一方的厚度设定为被下式(4)规定的厚度d。
87.d=1/4
×
λ/ε
r1/2
×
(2n 1)
···
(4)
88.在此,λ为向外壳24a入射的雷达电波的波长,ε
r
为外壳24a及外罩22a中的至少一方的相对介电常数,n为零以上的整数。
89.以上,对本发明的实施方式进行了说明,但不用说,本发明的技术范围不应由本实施方式的说明限定性地解释。本领域技术人员将理解,本实施方式仅为一例,在权利要求书所记载的发明的范围内能够进行各种实施方式的变更。本发明的技术的范围应以权利要求书所记载的发明的范围及其等效范围为准。
90.本技术适当地引用2019年3月8日申请的日本专利申请(日本特愿2019
‑
042663号)所公开的内容。
91.附图标记说明
92.1 车辆
93.2 车辆系统
94.3 车辆控制部
95.4a 左前传感系统
96.4b 右前传感系统
97.4c 左后传感系统
98.4d 右后传感系统
99.5 传感器
100.7a、70a 左前灯具
101.7b 右前灯具
102.7c 左后灯具
103.7d 右后灯具
104.10 无线通信部
105.11 存储装置
106.12 转向致动器
107.13 转向装置
108.14 制动致动器
109.15 制动装置
110.16 加速致动器
111.17 加速装置
112.22a、22b、22c、22d 外罩
113.24a、24b、24c、24d 外壳
114.25a 隅角立方反射器(反射器)
115.40a 控制部
116.42a 照明单元
117.43a 相机
118.44a lidar单元
119.45a 毫米波雷达
120.420a 照明单元控制部
121.430a 相机控制部
122.440a lidar单元控制部
123.450a 毫米波雷达控制部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。