1.本发明属于计算机视觉与计算机控制领域,具体涉及视觉伺服跟踪拍摄技术、高精度伺服控制等技术领域,是一种基于视觉伺服控制的全自动伺服跟踪拍摄方法。
背景技术:
2.运动目标的全自动跟踪拍摄技术是实现运动分析智能化的关键性技术,可以为运动员、教练员和教研员提供丰富的数据支持。在一些体育项目的训练过程中,运动员处于高速运动状态,无法有效观看到自己的肢体动作是否符合技术要求,也无法对前阶段的训练情况进行回顾对比分析。教练员作为运动场外人员,可视范围有限,无法捕捉运动目标全赛道的运动情况,而在与运动员进行运动情况分析过程中,缺乏直观的视频数据。因此,实现运动目标的全自动跟踪拍摄对帮助运动员训练和赛事直播具有重大意义。然而,传统的运动目标跟踪拍摄设备需要在运动场地架设多台视频采集装置并由专业技术人员手动控制相机的运动,需要耗费大量的人力和物力,且不便于跳台滑雪和高山滑雪等恶劣环境下的运动拍摄,而单纯使用跟踪算法的跟踪拍摄方式不具备良好的鲁棒性,且存在跟踪精度和实时性较差的问题。
技术实现要素:
3.针对目前跟踪拍摄技术遇到的鲁棒性、跟踪精度和实时性较差的问题,本发明提出了一种全自动伺服跟踪拍摄装置和方法。本发明适用于跳台滑雪、高山滑雪和速度滑冰等运动场地固定的体育项目,不局限于特定场景。本发明实现了运动目标的全自动跟踪拍摄与视频数据推送,为运动员回顾自己的运动情况提供了直观的视频数据,为教练员和教研员进行运动分析提供了基础数据支持。
4.本发明是一种全自动伺服跟踪拍摄方法,包括如下步骤:
5.第一步,设计一台高精度二维转台,与运动控制器,电机驱动器,上位机共同组成高精度伺服控制系统,并将高清相机固定于转台支架上。
6.第二步,针对采集到的视频选取除运动执行启动之后第一帧之外的视频帧为当前帧f1,当前帧f1的前一帧为f0,将f0和f1转为灰度图并利用高斯滤波的方法进行预处理;以区间[a1:a2,b1:b2](高度为a,宽度为b)分别截取任意位置的矩形感兴趣区域i0和i1,计算i0和i1范围内各个像素点差值的方差v
p
,当v
p
大于阈值t时,运动执行模块视频采集模块开始启动。
[0007]
第三步,在进入自动运动员检测与跟踪状态之前,运动执行机构会自动归位至初始位置,该初始位置设置为运动员的起始位置。当运动员位于起始位置时,系统会调用检测器对前两帧图像进行运动员检测,存储目标运动员在图像坐标系中的位置,并使用检测边界框初始化主跟踪器1,主跟踪器1输出的跟踪置信度与跟踪预测边界框。
[0008]
第四步,编写全自动程序,针对运动场地,设定运动员出发点和停止点并划分大致轨迹上的关键点,记录关键点相应时刻运动执行模块的编码量和时间,根据各个数据点的
位置、时间参数计算各个关键点之间的轨迹位置和速度,得到速度连续且加速度连续的基础轨迹数据b
a
,在所述基础轨迹的基础上,使用跟踪算法得到运动目标在图像中的位置,将所述目标位置与图像中心点做差得到差值e
i
,使用pid算法计算得到伺服电机的下一时刻速度v1,当v1与基础轨迹数据b
a
中的基础速度的差值的绝对值与相应基础速度的比值r
v
小于阈值t
v
时,设定伺服电机的最新速度为v1,当所述比值r
v
大于或等于阈值t
v
时,设定伺服电机的最新速度为
[0009]
第五步,利用超高频uhf远距离卡和超高频rfid远距离读写器,对不同运动目标进行标识,将视频采集模块获取的视频数据与运动员进行绑定,视频数据上传至后台服务器后并推送至相应的运动员。
[0010]
本发明与现有技术相比具有如下优点:
[0011]
(1)根据运动目标在图像中的位置,对基础轨迹数据进行微调,实现了对运动目标的全自动的跟踪拍摄。
[0012]
(2)方便运动员和教练员快捷且直观地回顾运动员的运动情况。
[0013]
(3)扩宽了单一机位的视频采集范围。
[0014]
(4)避免了专业技术人员在恶劣环境中执行跟踪拍摄任务。
附图说明
[0015]
图1是本发明系统工作流程图;
[0016]
图2是运动执行装置和视频采集装置;
[0017]
图3是目标检测与目标跟踪候选框选择策略流程图;
[0018]
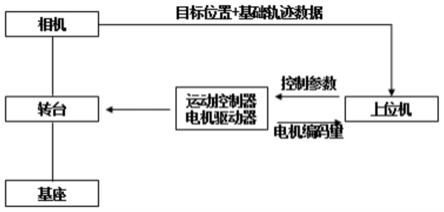
图4是本发明系统整体结构框图。
具体实施方式
[0019]
下面结合附图和具体实施例对本发明进行详细说明。应指出的是,所描述的实施例仅旨在便于对本发明的理解,而对其不起任何限定作用。附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的,附图所展示的结构是实际结构的一部分;其次,本发明以运动规划和执行作为实施例进行说明,本发明适用于不同的运动项目和不同的场地。
[0020]
一种全自动伺服跟踪拍摄方法,其流程图如图1所示,系统由一台pc上位机、一台伺服电机控制器及其驱动器、一台高精度二位转台、一台可控变焦相机、超高频uhf远距离卡和超高频rfid远距离读写器等组成,其中运动执行装置和视频采集装置如图2所示。
[0021]
第一,基础轨迹数据采集。在首次到达运动场地时,进行基础轨迹数据采集,设定运动员出发点和停止点并划分大致轨迹上的关键点,使用秒表或录像设备记录运动目标到达各个关键点的时间间隔,多次测量并记录,从而得到各个关键点之间时间间隔的平均值。
[0022]
第二,手动控制转台运动,使得相机的图像中心指向所述关键点,并记录各个关键点相应的伺服电机编码器数值,向运动控制器传输各个关键点相应的伺服电机编码器数值和相应的时间,根据各个数据点的位置、时间参数计算各个关键点之间的轨迹位置和速度,得到速度连续且加速度连续的基础轨迹数据b
a
。
[0023]
第三,自动运行过程,系统放置于赛道外侧,完成基础数据采集后进入无人值守状态,其具体功能如下:
[0024]
1.过线检测程序,当前帧f1的前一帧为f0,将f0和f1转为灰度图并利用高斯滤波的方法进行预处理;以区间[a1:a2,b1:b2]分别截取任意位置的矩形感兴趣区域i0和i1,计算i0和i1范围内各个像素点差值的方差v
p
,当v
p
大于阈值t时,运动执行模块和视频采集模块开始启动,目标检测算法获取运动目标在图像中的位置,并初始化跟踪器。
[0025]
2.检测与跟踪程序,所述基础轨迹b
a
的基础上,使用检测与跟踪模块得到运动目标在图像中的位置,目标检测与目标跟踪候选框选择策略流程图流程图如图3所示,对基础轨迹数据b
a
进行微调,得到当前下一时刻的伺服电机速度。本发明整体结构框图如图4所示,将所述目标位置与图像中心点做差得到差值e
i
,使用pid算法计算得到伺服电机的下一时刻速度v1,当v1与基础轨迹数据b
a
中的基础速度的差值的绝对值与相应基础速度的比值r
v
小于阈值t
v
时,设定伺服电机的最新速度为v1,当所述比值r
v
大于或等于阈值t
v
时,设定伺服电机的最新速度为
[0026]
3.身份记录与数据推送程序,运动员完成运动过程后,超高频rfid远距离读写器读取到运动员携带的超高频uhf远距离卡,获得该运动员的身份标识,后台服务器向该运动员和教练员的移动终端推送该段运动过程视频数据。
[0027]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
