1.本发明涉及记录控制装置、记录控制系统、记录控制方法以及程序。
背景技术:
2.已知如下行车记录仪:在车辆的停车中检测到冲击的情况、或者从相机所拍摄的影像中检测到移动体的情况下,保存检测时的影像数据作为事件记录数据。例如,在专利文献1中公开了一种装置,其在停止中检测到移动体时,进行影像数据的记录。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2006
‑
321357号公报。
技术实现要素:
6.通过如专利文献1记载的技术所检测出的移动体的多数与需要保存影像数据的事件无关。因此,在专利文献1中,保存的必要性低的影像数据的多数有可能被保存下来。
7.另外,在专利文献1中,即使在将检测到移动体的影像数据作为可覆盖数据而记录的情况下,也按照记录日期的早晚顺序进行覆盖。因此,在专利文献1中,记录了与事件的发生有关的事情的影像数据有可能通过覆盖而被删除。
8.本发明的课题在于,提供一种能够在停车中适当地记录影像的记录控制装置、记录控制系统、记录控制方法以及程序。
9.本发明的记录控制装置包括:拍摄数据获取部,从相机获取拍摄数据,所述相机对车辆的周边进行拍摄;移动体检测部,从所述拍摄数据获取部在所述车辆的停车中获取的拍摄数据中,检测移动体;以及记录控制部,将所述移动体的检测信息与所述拍摄数据关联,并作为可覆盖的数据文件记录到记录部,当在所述记录部中需要覆盖数据文件时,降低检测到所述移动体的数据文件的覆盖优先级并进行覆盖。
10.本发明涉及的记录控制系统包括:本发明涉及的记录控制装置、对所述车辆的周边进行拍摄的相机、以及记录所述数据文件的记录部。
11.本发明的记录控制方法包括如下步骤:从相机获取拍摄数据,所述相机对车辆的周边进行拍摄;从在所述车辆的停车中获取的拍摄数据中,检测移动体;以及将所述移动体的检测信息与所述拍摄数据关联,并作为可覆盖的数据文件记录到记录部,当现在所述记录部中需要覆盖数据文件时,降低检测到所述移动体的数据文件的覆盖优先级并进行覆盖。
12.本发明涉及的程序用于使作为记录控制装置动作的计算机执行如下步骤:从相机获取拍摄数据,所述相机对车辆的周边进行拍摄;从在所述车辆的停车中时获取的拍摄数据中,检测移动体;以及将所述移动体的检测信息与所述拍摄数据关联,并作为可覆盖的数据文件记录到记录部,当在所述记录部中需要覆盖数据文件时,降低检测到所述移动体的数据文件的覆盖优先级并进行覆盖。
13.根据本发明,能够在停车中适当地记录影像。
附图说明
14.图1是示出第一实施方式涉及的记录控制系统的结构的一个示例的框图;
15.图2是示出拍摄数据的一个示例的示意图;
16.图3是示出第一实施方式涉及的控制部的处理流程的一个示例的流程图;
17.图4是示出第一实施方式涉及的控制部的覆盖处理流程的一个示例的流程图;
18.图5是示出第二实施方式涉及的控制部的处理流程的一个示例的流程图;
19.图6是示出第二实施方式涉及的控制部的覆盖处理流程的一个示例的流程图;
20.图7是示出第三实施方式涉及的控制部的处理流程的一个示例的流程图;
21.图8是示出第四实施方式涉及的控制部的处理流程的一个示例的流程图;
22.图9是示出第四实施方式涉及的覆盖处理流程的一个示例的流程图;
23.图10是示出第五实施方式涉及的控制部的处理流程的一个示例的流程图;
24.图11是示出第六实施方式涉及的控制部的覆盖处理流程的一个示例的流程图;
25.图12是示出第七实施方式涉及的控制部的覆盖处理流程的一个示例的流程图;
26.图13是示出第八实施方式涉及的控制部的覆盖处理流程的一个示例的流程图。
具体实施方式
27.以下,参照附图,对本发明涉及的实施方式进行详细的说明。此外,本发明并不局限于本实施方式,另外,当存在多个实施方式时,本发明也包含组合各实施方式而成的实施方式。
28.[第一实施方式]
[0029]
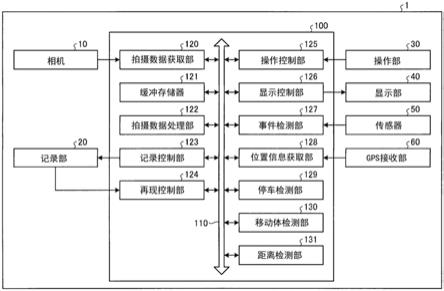
使用图1,对本发明的第一实施方式涉及的记录控制系统的结构进行说明。图1是示出第一实施方式涉及的记录控制系统的结构的一个示例的框图。
[0030]
如图1所示,记录控制系统包括相机10、记录部20、操作部30、显示部40、传感器50、gps(global positioning system,全球定位系统)接收部60、控制部(记录控制装置)100。记录控制系统1搭载于车辆上,基于停车中所拍摄的拍摄数据来检测移动体,将移动体的检测信息与拍摄数据关联,并作为数据文件而记录。并且,记录控制系统1在记录新的数据文件时,在需要覆盖数据文件的情况下,记录新的数据文件以使不覆盖检测到移动体的数据文件。
[0031]
记录控制系统1是所谓的行车记录仪,例如,以能够拍摄车辆前方的方式安装于车辆的挡风玻璃上部,检测与事故等应当检测为事件的事情相当的冲击,并保存包含事故发生时在内的期间的拍摄数据作为事件记录数据。记录控制系统1不限于作为独立的装置而安装在车辆上的装置,也可以通过作为导航装置的功能而实现的结构、预先安装在车辆上的结构、载置于车辆上使用的可移动型装置来实现。
[0032]
相机10对搭载有记录控制系统1的车辆的周边或周围进行拍摄。相机10例如作为行车记录仪所具备的相机而对车辆的前方或后方进行拍摄。另外,相机10可以是包含多个相机的相机单元以拍摄车辆的周边或周围,也可以是全景相机。相机10将拍摄车辆的周边或周围所获取的拍摄数据输出到拍摄数据获取部120。
[0033]
记录部20记录在检测到事件时记录的事件记录数据等各种数据。记录部20例如记录通过相机10拍摄车辆周边或周围获取的拍摄数据。记录部20例如记录与移动体的检测信息对应的拍摄数据。在这种情况下,记录部20例如记录与移动体的检测信息对应的拍摄数据作为数据文件。记录部20例如记录检测到事件的拍摄数据作为禁止覆盖的数据文件。
[0034]
另外,记录部20例如存储用于实现控制部100的各部的程序。在这种情况下,控制部100通过扩展和执行存储在记录部20中的程序来执行各部的功能。记录部20例如可以通过ram(random access memory,随机存取存储器)、闪存(flash memory,快闪存储器)等半导体存储元件、或者硬盘、固态硬盘、光盘等存储装置来实现。记录部20可以由多个不同的存储器等构成。
[0035]
操作部30接受针对记录控制系统1的各种操作。各种操作包括事件记录数据的再现的开始、事件记录数据的保存的开始等操作。操作部30向操作控制部125输出与所接收的操作对应的操作信号。操作部30例如可以通过物理开关、设置在显示部40上的触摸面板来实现。
[0036]
显示部40显示各种影像。显示部40例如显示记录部20所记录的拍摄数据。显示部40例如是包括液晶显示器(lcd:liquid crystal display)或者有机el(organic electro
‑
luminescence,有机电致发光)显示器等的显示器。
[0037]
传感器50检测由于针对车辆的事件的发生引起的各种信息。传感器50例如是加速度传感器,检测施加到车辆的加速度。传感器50例如是陀螺仪传感器,检测与车辆姿势相关的信息。传感器50向事件检测部127输出检测结果。
[0038]
gps接收部60由gps接收电路、gps接收天线等构成,接收gps信号。gps接收部60向位置信息获取部128输出所接收的gps信号。
[0039]
控制部100包括拍摄数据获取部120、缓冲存储器121、拍摄数据处理部122、记录控制部123、再现控制部124、操作控制部125、显示控制部126、事件检测部127、位置信息获取部128、停车检测部129、移动体检测部130和距离检测部131。控制部100所具备的各部经由总线110彼此连接。控制部100例如可以通过包括cpu(central processing unit,中央处理器)的电子电路来实现。
[0040]
拍摄数据获取部120从外部获取各种拍摄数据。拍摄数据获取部120例如从相机10获取相机10所拍摄的拍摄数据。拍摄数据获取部120例如向缓冲存储器121和显示控制部126输出从相机10获取的拍摄数据。拍摄数据获取部120可以获取相机10所拍摄的影像数据作为拍摄数据,除了影像数据之外,还可以获取包含了配置在相机10或其他位置上的未图示麦克风所获取的声音数据的拍摄数据。
[0041]
缓冲存储器121是对拍摄数据获取部120所获取的拍摄数据进行临时存储的控制部100的内部存储器。具体而言,缓冲存储器121一边更新一边临时存储拍摄数据获取部120所获取的一定时间量的拍摄数据。
[0042]
拍摄数据处理部122对缓冲存储器121中临时存储的拍摄数据执行各种处理。拍摄数据处理部120例如将缓冲存储器121中临时存储的拍摄数据例如转换为例如由h.264或mpeg
‑
4(moving picture experts group,运动图像专家组)等任意方式的编解码器编码的例如mp4格式等任意文件格式。拍摄数据处理部122例如根据缓冲存储器121中临时存储的拍摄数据,生成拍摄数据作为一定时间量的文件。具体而言,例如,拍摄数据处理部122例如
对于缓冲存储器121中临时存储的拍摄数据,按照记录顺序生成60秒的拍摄数据作为一个文件。拍摄数据处理部122将所生成的拍摄数据输出到记录控制部123。另外,拍摄数据处理部122将所生成的拍摄数据输出到显示控制部126。作为数据文件而生成的拍摄数据的期间虽然作为一个示例而设为60秒,但不限于此。
[0043]
记录控制部123将各种数据记录到记录部20。记录控制部123例如进行将由拍摄数据处理部122文件化后的拍摄数据记录到记录部20的控制。
[0044]
记录控制部123将移动体的检测信息与拍摄数据关联,并作为可覆盖的数据文件而记录到记录部20。在这种情况下,记录控制部123将数据文件循环记录到记录部20。记录控制部123从移动体检测部130接收移动体的检测信息。另外,例如,当在记录部20中需要覆盖数据文件时,记录控制部123降低检测到移动体的数据文件的覆盖优先级并进行覆盖记录。换言之,记录控制部123优先覆盖未检测到移动体的数据文件。另外,记录控制部123可以记录从检测到移动体起预定期间(例如,60秒)内的拍摄数据。在这种情况下,用户可以任意变更预定期间。
[0045]
记录控制部123将事件检测部127检测到事件时的拍摄数据作为禁止覆盖的数据文件而记录在记录部20。具体地,记录控制部123接受由事件检测部127判断为发生了事件的情况,将包含事件检测时间点在内的、事件检测时间点的前后预定期间的拍摄数据作为禁止覆盖的事件记录数据而保存在记录部20。换言之,记录控制部123将事件检测部127未检测到事件时的拍摄数据作为可覆盖的数据文件而记录在记录部20。在记录部20中记录可覆盖的数据文件的循环记录区域的记录容量成为上限时,记录控制部123例如在记录部20中记录的可覆盖的拍摄数据中,从日期最早的数据文件优先覆盖记录新的数据文件。
[0046]
当在记录部20中需要覆盖数据文件时,记录控制部123对于检测到移动体的数据文件,降低时间上接近检测到事件的时间点的数据文件的覆盖优先级并进行覆盖。换言之,记录控制部123优先覆盖时间上远离检测到事件的时间点的数据文件。记录控制部123对于数据文件,可以在时间上越接近检测到事件的时间点就越降低覆盖优先级,并进行覆盖。在这种情况下,记录控制部123从时间上远离的数据文件开始依次覆盖并记录新的数据文件。
[0047]
当在记录部20中需要覆盖检测到移动体的数据文件时,在检测到移动体的数据文件存在多个的情况下,记录控制部123从距移动体的距离大的数据文件起作为覆盖对象来进行记录。具体地,记录控制部123基于距离信息,提高从车辆到移动体的距离大的数据文件的覆盖优先级,并从车辆到移动体的距离大的数据文件开始进行覆盖。
[0048]
记录控制部123在没有始终进行记录时,接受由事件检测部127判断为发生了事件的情况,从事件检测时间点开始进行记录,在检测到事件之后,将预定期间的拍摄数据作为禁止覆盖的事件记录数据而保存到记录部20。
[0049]
再现控制部124再现记录部20中记录的各种数据。再现控制部124例如再现作为数据文件而记录在记录部20中的拍摄数据。再现控制部124例如再现记录部20中记录的包含事件的拍摄数据。具体地,再现控制部124按照从操作控制部125输出的与操作部30的操作对应的控制信号来再现拍摄数据。
[0050]
操作控制部125从操作部30接受与从用户等接受到的操作相关的操作信号。操作控制部125例如接受与拍摄数据的再现的开始、拍摄数据的记录的开始等操作相关的操作信号。操作控制部125将与所接受的操作信号对应的控制信号输出到记录控制部123或再现
控制部124。在这种情况下,记录控制部123以及再现控制部124按照控制信号,执行动作。
[0051]
显示控制部126在显示部40上显示各种影像。具体地,通过向显示控制部126、显示部40输出影像信号,在显示部40上显示影像。显示控制部126例如通过将与记录部20中记录的拍摄数据相关的影像信号输出到显示部40,在显示部40上显示拍摄数据。
[0052]
事件检测部127从传感器50接受传感器50的检测结果。事件检测部127基于所接受的检测结果来检测事件。事件检测部127例如获取与加速度相关的加速度信息作为检测结果。在这种情况下,事件检测部127基于加速度信息来检测事件。事件检测部127在检测到事件时,对记录控制部123输出控制信号,该控制信号表示检测到事件的信息。
[0053]
事件检测部127将从传感器50输出的加速度相当于车辆与例如其他车辆等其他物体碰撞时的加速度时的加速度检测为与事件相当的加速度。关于与事件相当的加速度的检测,可以在作为3轴加速度传感器的传感器50中,在x轴方向、y轴方向和z轴方向的每一个上进行加权。另外,与事件相当的加速度的检测也可以将加速度的上升急剧的加速度作为检测对象。
[0054]
事件检测部127例如从距离检测部131接受与从车辆到移动体的距离相关的距离信息。在这种情况下,事件检测部127基于距离信息来检测事件。具体地,事件检测部127例如基于距离信息,检测从车辆到移动体的距离小于预定距离作为事件。预定距离是移动体可以针对车辆进行某种动作的距离,例如1m等。预定距离可以由用户任意设定。
[0055]
位置信息获取部128从gps接收部60接受gps信号。位置信息获取部128基于gps信号来计算当前位置信息。
[0056]
停车检测部129检测车辆已停车。停车检测部129例如经由can(controller area network,控制器局域网)获取车辆信息。停车检测部129从车辆信息中检测车辆的发动机等动力关闭、辅助电源关闭、停车档位被选择、侧制动器动作、车辆的当前位置表示停车场等条件。停车检测部129还可以检测各种条件的组合。停车检测部129基于检测到的条件来检测车辆已停车。
[0057]
移动体检测部130从拍摄数据获取部120所获取的拍摄数据中检测移动体的有无。移动体检测部130例如在拍摄数据中以像素为单位或以数个像素的四方块为单位,检测亮度和颜色信息针对每一帧变化的区域。例如,如图2所示,移动体检测部130从拍摄数据200中检测包括移动体(例如,人220)的移动体区域210。在这种情况下,移动体检测部130在预定以上宽度的区域中检测到时间变化时,判断为检测到移动体。例如,移动体检测部130可以针对移动体区域210执行物体识别处理,并确定移动体区域210中存在的移动体的类型。此外,移动体检测部130检测移动体的方法不限于此,也可以使用公知的方法检测移动体。
[0058]
距离检测部131检测从车辆到各种物体的距离。距离检测部131例如在通过移动体检测部130检测到移动体时,检测从车辆到移动体的距离。距离检测部131例如在检测到移动体的数据文件中,将检测到的移动体距车辆最近时的距离检测为从车辆到移动体的距离。具体地,距离检测部131例如基于拍摄数据来检测距移动体的距离。距离检测部131检测距移动体的距离的方法没有特别的限制,可以使用公知的方法。例如,距离检测部131基于接地位置来检测距移动体的距离,该接地位置是表示拍摄数据中包含的移动体的范围的最下方的位置。另外,距离检测部131还可以检测从如毫米波或者声波等的其他传感器到移动体的距离。距离检测部131将与从车辆到移动体的距离相关的距离信息例如输出到记录控
制部123和事件检测部127。
[0059]
使用图3,对第一实施方式涉及的控制部的处理进行说明。图3是示出第一实施方式涉及的控制部的处理流程的一个示例的流程图。
[0060]
图3的处理通过车辆的停车监控功能动作来开始。车辆的停车监控功能例如在停车检测部129检测到车辆停车的情况、通过用户操作操作部30来指示停车监控功能的开始的情况等时开始。首先,控制部100随着停车监控功能的开始而开始进行循环记录、事件检测、移动体检测的各处理(步骤s101)。然后,控制部100进行步骤s102。
[0061]
接下来,控制部100判定是否从拍摄数据中检测到移动体(步骤s102)。当检测到移动体时(步骤s102的是),控制部100进入步骤s103,在拍摄数据的数据文件中添加表示已检测到移动体的移动体检测标志,并记录在记录部20中(步骤s103)。然后,控制部100进入步骤s106。另一方面,当未检测到移动体时(步骤s102的否),控制部100进入步骤s104,判定是否检测到事件(步骤s104)。
[0062]
当检测到事件时(步骤s104的是),控制部100进入步骤s105,将拍摄数据作为事件记录数据而保存到记录部20(步骤s105)。然后,控制部100进入步骤s106。另一方面,当未检测到事件时(步骤s104的否),控制部100进入步骤s106。
[0063]
在步骤s106中,控制部100判定停车监控功能是否结束(步骤s106)。当停车监控功能尚未结束时(步骤s106的否),控制部100进入步骤s102。另一方面,当停车监控功能结束时(步骤s106的是),控制部100结束图3的处理。
[0064]
接下来,使用图4,对第一实施方式涉及的控制部的覆盖处理进行说明。图4是示出第一实施方式涉及的控制部的覆盖处理流程的一个示例的流程图。图4的处理在每次生成可覆盖的数据文件时执行。
[0065]
首先,控制部100为了将可覆盖数据文件记录到记录部20而判定是否需要覆盖(步骤s201)。是否需要覆盖的判定基于记录部20中的循环记录区域的记录容量是否为上限来判定。当判定为需要覆盖时(步骤s201的是),控制部100进入步骤s202,判定是否存在未添加移动体检测标志的数据文件(步骤s202)。
[0066]
当存在未添加移动体检测标志的数据文件时(步骤s202的是),控制部100进入步骤s203,判定是否存在多个未添加移动体检测标志的数据文件(步骤s203)。
[0067]
当存在多个未添加移动体检测标志的数据文件时(步骤s203的是),控制部100进入步骤s204,针对未添加移动体检测标志的最早数据文件覆盖新的数据文件(步骤s204)。然后,控制部100结束图4的处理。另一方面,当不存在多个未添加移动体检测标志的数据文件时(步骤s203的否),控制部100进入步骤s205,针对未添加移动体检测标志的数据文件覆盖新的数据文件(步骤s205)。然后,控制部100结束图4的处理。
[0068]
当步骤s201中不需要覆盖时(步骤s201的否),控制部100进入步骤s206,将拍摄数据作为数据文件而记录到记录部20(步骤s206)。然后,控制部100结束图4的处理。
[0069]
当步骤s202中不存在未添加移动体检测标志的数据文件时(步骤s202的否),控制部100进入步骤s207,判定是否存在多个添加有移动体检测标志的数据文件(步骤s207)。
[0070]
当存在多个添加有移动体检测标志的数据文件时(步骤s207的是),控制部100进入步骤s208,针对添加有移动体检测标志的最早的数据文件覆盖新的数据文件(步骤s208)。然后,控制部100结束图4的处理。另一方面,当不存在多个添加有移动体检测标志的
数据文件时(步骤s207的否),控制部100进入步骤s209,针对添加有移动体检测标志的一个数据文件覆盖新的数据文件(步骤s209)。然后,控制部100结束图4的处理。
[0071]
如上所述,在第一实施方式中,当将拍摄数据作为数据文件而记录到记录部时,可以优先覆盖和记录未包含移动体的数据文件。另外,在第一实施方式中,在不存在未包含移动体的数据文件的情况下,当存在多个覆盖候选的数据文件时,可以覆盖并记录日期最早的数据文件。由此,第一实施方式能够适当地记录影像。
[0072]
另外,在第一实施方式中,移动体检测标志可以从添加标志起经过预定时间(例如,48小时)后删除。由此,在第一实施方式中,例如,可以抑制记录部20的循环记录区域的容量被添加有移动体检测标志的数据文件所占压。
[0073]
[第二实施方式]
[0074]
使用图5,对第二实施方式涉及的控制部的处理进行说明。图5是示出第二实施方式涉及的控制部的处理流程的一个示例的流程图。此外,第二实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0075]
由于步骤s301和步骤s302的处理分别与图3所示的步骤s101和步骤s102的处理相同,因此省略说明。
[0076]
在步骤s302的“是”之后,控制部100获取距检测到的移动体的距离信息(步骤s303)。在步骤s303中,控制部100获取的距离信息可以是一个值,也可以是范围。例如,控制部100可以以0m至3m、3m至5m、5m至10m、10m以上这样的特定范围的划分来获取距移动体的距离。
[0077]
接着,控制部100将移动体检测标志和距离信息与数据文件关联,并记录到记录部20(步骤s304)。
[0078]
由于步骤s305至步骤s307的处理分别与图3所示的步骤s104至步骤s106的处理相同,因此省略说明。
[0079]
接下来,使用图6,对第二实施方式涉及的控制部的覆盖处理进行说明。图6是示出第二实施方式涉及的控制部的覆盖处理流程的一个示例的流程图。
[0080]
由于步骤s401至步骤s407的处理分别与图4所示的步骤s201至步骤s207的处理相同,因此省略说明。
[0081]
在步骤s407的“是”之后,控制部100进入步骤s408,针对添加有距移动体的距离最远的移动体检测标志的数据文件覆盖新的数据文件(步骤s408)。然后,控制部100结束图6的处理。另一方面,在步骤s407的“否”之后,控制部100进入步骤s409,针对添加有移动体检测标志的数据文件覆盖新的数据文件。然后,控制部100结束图6的处理。
[0082]
如上所述,在第二实施方式中,当检测到移动体时,能够将移动体检测标志与距移动体的距离信息关联,并记录到数据文件。其结果为,在第二实施方式中,在不存在未包含移动体的数据文件的情况下,当存在多个覆盖候选的数据文件时,能够覆盖并记录到距移动体的距离最远的数据文件。由此,第二实施方式能够更适当地记录影像。
[0083]
[第三实施方式]
[0084]
使用图7,对本第三实施方式涉及的控制部的处理进行说明。图7是示出第三实施方式涉及的控制部的处理流程的一个示例的流程图。此外,第三实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0085]
由于步骤s501至步骤s503的处理分别与图5所示的步骤s301至步骤s303的处理相同,因此省略说明。另外,由于步骤s505至步骤s508的处理分别与图5所示的步骤s304至步骤s307的处理相同,因此省略说明。即,图7所示的处理与图5所示的处理的不同点在于,在步骤s503之后追加步骤s504的处理。
[0086]
在步骤s503之后,控制部100判定所获取的距移动体的距离是否小于预定距离(步骤s504)。
[0087]
当小于预定距离时(步骤s504的是),控制部100进入步骤s507。在这种情况下,例如将预定距离设为1m,当距移动体的距离小于1m时,控制部100判断为事件,并保存事件记录数据。
[0088]
另一方面,当距离不小于预定距离时(步骤s50的否),控制部100进入步骤s505。
[0089]
由于第三实施方式涉及的覆盖处理与第二实施方式相同,因此省略说明。
[0090]
如上所述,在第三实施方式中,当检测到移动体时,能够将距移动体的距离小于预定距离检测为事件,并作为事件记录数据而保存。其结果为,在第三实施方式中,能够将靠近车辆的移动体被拍摄到的拍摄数据作为事件记录数据而保存。由此,第三实施方式能够更适当地记录影像。
[0091]
[第四实施方式]
[0092]
使用图8,对第四实施方式涉及的控制部的处理进行说明。图8是示出第四实施方式涉及的控制部的处理流程的一个示例的流程图。此外,第四实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0093]
图8的处理通过车辆的停车监控功能动作来开始。车辆的停车监控功能例如在停车检测部129检测到车辆停车的情况、通过用户操作操作部30来指示停车监控功能的开始的情况等时开始。首先,控制部100随着停车监控功能的开始而开始进行事件检测处理和移动体检测处理(步骤s601)。然后,控制部100进入步骤s602。
[0094]
接下来,控制部100判定是否从拍摄数据中检测到移动体(步骤s602)。当检测到移动体时(步骤s602的是),控制部100进入步骤s603,开始记录处理检测到移动体的数据文件(步骤s603)。然后,控制部100进入步骤s604。另一方面,当未检测到移动体时(步骤s602的否),则控制部100进入步骤s606。
[0095]
由于步骤s604至步骤s608的处理分别与图5所示的步骤s303至步骤s307的处理相同,因此省略说明。
[0096]
接下来,使用图9,对第四实施方式涉及的控制部的覆盖处理进行说明。图9是示出第四实施方式涉及的覆盖处理流程的一个示例的流程图。图9的处理在每次生成可覆盖的数据文件时执行。
[0097]
由于步骤s701至步骤s706的处理分别与图6所示的步骤s401至步骤s406的处理相同,因此省略说明。
[0098]
当步骤s702中判定为“否”时,控制部100进入步骤s707,覆盖到添加有移动体检测标志的数据文件中的、距移动体的距离最远的数据文件(步骤s707)。然后,控制部100结束图9的处理。
[0099]
如上所述,在第四实施方式中,仅当检测到移动体时,能够将移动体检测标志和距离信息与移动体的拍摄数据关联,并进行记录,其中,该距离信息表示从车辆到移动体的距
离。因此,在第四实施方式中,即使不进行循环记录也能够记录移动体的拍摄数据,因此能够防止记录部的容量被不必要的拍摄数据所占压。由此,第四实施方式能够适当地记录影像。
[0100]
在第四实施方式中,当将拍摄数据作为数据文件而记录在记录部时,能够优先覆盖和记录未包含移动体的数据文件。另外,在第四实施方式中,当不存在未包含移动体的数据文件时,能够覆盖和记录到距移动体的距离最远的数据文件。由此,第四实施方式能够适当地记录影像。
[0101]
另外,在第四实施方式中,移动体检测标志可以从添加标志起经过预定时间(例如,48小时)后删除。由此,在第四实施方式中,例如,可以抑制记录部20的容量被添加有移动体检测标志的数据文件所占压。
[0102]
[第五实施方式]
[0103]
使用图10,对第五实施方式涉及的控制部的处理进行说明。图10是示出第五实施方式涉及的控制部的处理流程的一个示例的流程图。此外,第五实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0104]
由于步骤s801至步骤s804的处理分别与图8所示的步骤s601至步骤s604的处理相同,因此省略说明。另外,由于步骤s806至步骤s809的处理分别与图8所示的步骤s605至步骤s608的处理相同,因此省略说明。图10所示的处理与图8所示的处理的不同点在于,在步骤s804与步骤s806之间具有步骤s805的处理。
[0105]
在步骤s805中,控制部100判定距移动体的距离是否小于预定距离(步骤s805)。
[0106]
当距移动体的距离不小于预定距离时(步骤s805的否),控制部100进入步骤s806。另一方面,当距移动物体的距离小于预定距离时(步骤s805的是),控制部100进入步骤s808。即,在第五实施方式中,当距移动体的距离不小于预定距离时,将移动体检测标志和距离信息与数据文件关联,并记录到记录部20。当距移动体的距离小于预定距离时,保存拍摄数据作为事件记录数据。
[0107]
由于第五实施方式涉及的覆盖处理与第四实施方式相同,因此省略说明。
[0108]
如上所述,在第五实施方式中,当检测到移动体、且距移动体的距离不小于预定距离时,能够将移动体检测标志和距离信息与移动体的拍摄数据关联,并进行记录,其中,该距离信息表示从车辆到移动体的距离。另外,在第五实施方式中,当检测到移动体、且距移动体的距离小于预定距离时,能够保存拍摄数据作为事件记录数据。因此,在第五实施方式中,能够进一步防止记录部的容量被不必要的拍摄数据所占压。由此,第五实施方式能够更适当地记录影像。
[0109]
[第六实施方式]
[0110]
使用图11,对第六实施方式涉及的控制部的覆盖处理进行说明。图11是示出第六实施方式涉及的控制部的覆盖处理流程的一个示例的流程图。此外,第六实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0111]
由于步骤s901至步骤s906、以及步骤s909的处理分别与图4所示的步骤s201至步骤s206、以及步骤s209的处理相同,因此省略说明。
[0112]
当步骤s902中判定为“否”时,控制部100进入步骤s907,判定是否存在从检测到事件起时间上远离预定时间以上的数据文件(步骤s907)。在步骤s907中,例如将预定时间设
为10分钟,控制部100判定是否存在从检测到事件时起前后远离10分钟以上的数据文件。此外,预定时间可由用户任意设定。
[0113]
当判定为存在远离预定时间以上的数据文件时(步骤s907的是),控制部100进入步骤s908,针对远离预定时间以上的数据文件优先覆盖新的数据文件(步骤s908)。然后,控制部100结束图11的处理。另一方面,当判定为不存在远离预定时间以上的数据文件时(步骤s907的否),控制部100进入步骤s909。
[0114]
如上所述,在第六实施方式中,当将拍摄数据作为数据文件而记录到记录部时,能够优先覆盖和记录未包含移动体的数据文件。另外,在第六实施方式中,在不存在未包含移动体的数据文件的情况下,当将拍摄数据作为数据文件而记录到记录部时,能够优先覆盖和记录到从检测到事件起隔开预定时间的数据文件。由此,第六实施方式能够适当地记录影像。
[0115]
[第七实施方式]
[0116]
使用图12,对第七实施方式涉及的控制部的覆盖处理进行说明。图12是示出第七实施方式涉及的控制部的覆盖处理流程的一个示例的流程图。此外,第七实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0117]
由于步骤s1001至步骤s1006的处理分别与图11所示的步骤s901至步骤s906的处理相同,因此省略说明。另外,图12所示的处理与图11所示的处理的不同点在于,在步骤s1002中判定为“否”时的处理。
[0118]
在步骤s1002中判定为“否”之后,控制部100进入步骤s1007,针对添加有移动体检测标志、且时间上距事件检测时最远的数据文件优先覆盖新的数据文件(步骤s1007)。具体地,在步骤s1007中,控制部100与事件检测时的前后无关地,针对时间上距事件检测时最远的数据文件优先覆盖新的数据文件。然后,控制部100结束图12的处理。
[0119]
如上所述,在第七实施方式中,当不存在未包含移动体的数据文件时,能够针对时间上距事件检测时最远的数据文件优先覆盖和记录新的数据文件。即,在第七实施方式中,能够针对与事件的关联性小的可能性大的数据文件优先覆盖和记录新的数据文件。由此,第七实施方式能够更适当地记录影像。
[0120]
[第八实施方式]
[0121]
使用图13,对第八实施方式涉及的控制部的覆盖处理进行说明。图13是示出第八实施方式涉及的控制部的覆盖处理流程的一个示例的流程图。此外,第八实施方式涉及的记录控制系统的结构与第一实施方式涉及的记录控制系统的结构相同,因此省略说明。
[0122]
由于步骤s1101至步骤s1106的处理分别与图12所示的步骤s1001至步骤s1006的处理相同,因此省略说明。图13所示的处理与图12所示的处理的不同点在于,步骤s1107的处理与步骤s1007的处理不同。
[0123]
在步骤s1102判定为“否”后,控制部100进入步骤s1107,针对添加有移动体检测标志、且事件上距事件检测时最远的事件检测后的数据文件优先覆盖新的数据文件(步骤s1107)。具体地,在步骤s1107中,控制部100将事件检测后的数据文件优先作为覆盖的对象,事件检测前的数据文件的覆盖优先级比事件检测后的数据文件低。然后,控制部100结束图13的处理。
[0124]
如上所述,在第八实施方式中,当不存在未包含移动体的数据文件时,能够针对时
间上距事件检测最远的事件检测后的数据文件优先覆盖和记录新的数据文件。在第八实施方式中,通过将覆盖的数据文件限定为事件检测后的数据文件,能够保留与事件相关联的拍摄数据的可能性高的、事件检测前的数据文件。换言之,在第八实施方式中,通过优先记录事件检测后的时间上最远的数据文件,针对记录中的数据文件中的与事件的相关性最小的数据文件优先覆盖新的数据文件。由此,第八实施方式能够适当地记录影像。
[0125]
以上,说明了本发明的实施方式,但是本发明不限于上述实施方式的内容。另外,上述构成要素包含本领域技术人员容易想到的、本质上相同的、所谓等同范围的构造。进而,上述构成要素可以适当组合。而且,在不脱离上述实施方式的主旨的范围内,能够对构成要素进行各种省略、替换或变更。
[0126]
工业应用性
[0127]
本发明涉及的记录控制装置、记录控制系统、记录控制方法以及程序例如可以用于搭载于车辆上的行车记录仪。
[0128]
符号说明
[0129]
1:记录控制系统;
[0130]
10:相机;
[0131]
20:记录部;
[0132]
30:操作部;
[0133]
40:显示部;
[0134]
50:传感器;
[0135]
60:gps接收部;
[0136]
100:控制部(记录控制装置);
[0137]
110:总线;
[0138]
120:拍摄数据获取部;
[0139]
121:缓冲存储器;
[0140]
122:拍摄数据处理部;
[0141]
123:记录控制部;
[0142]
124:再现控制部;
[0143]
125:操作控制部;
[0144]
126:显示控制部;
[0145]
127:事件检测部;
[0146]
128:位置信息获取部;
[0147]
129:停车检测部;
[0148]
130:移动体检测部;
[0149]
131:距离检测部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。