本实用新型涉及道闸的技术领域,尤其是涉及一种道闸控制系统。
背景技术:
为了保证小区、厂区、园区等场所的安全以及监管,一般在每一个出入口设置管理点,通过在管理点处设置道闸以防止他人随意进入。
目前,道闸采用智能化方式控制,通过自动检测车辆后自动控制道闸的抬起和降落。由于道闸是智能化控制的,且检测车辆后才进行道闸的抬起和降落,若在道闸降落过程中,道闸下方有行人,且道闸继续降落则会砸伤行人,使得道闸的安全性下降。
技术实现要素:
本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种道闸控制系统,能够检测道闸降落时控制道闸继续降落以砸伤人员,从而提高了道闸的安全性。
本实用新型的一个实施例提供了道闸控制系统,包括:
道闸装置;
第一检测模块,用于检测车辆进入以输出第一检测信号;
第二检测模块,用于检测车辆离开以输出第二检测信号,还用于检测有人时输出第三检测信号;
控制模块,用于接收所述第一检测信号以控制所述道闸装置抬起;
还用于接收所述第二检测信号,以控制所述道闸装置降落;
还用于在所述道闸装置降落时间内接收到所述第三检测信号,以控制所述道闸装置保持抬起。
本实用新型实施例的道闸控制系统至少具有如下有益效果:通过控制模块根据第一检测信号控制道闸装置抬起,根据第二检测信号控制道闸装置降落,使得道闸装置智能化控制,再通过控制模块接收第三检测信号以控制道闸装置保持抬起,防止道闸装置在降落时砸伤行人,使得道闸装置智能化控制,又提高了道闸装置的安全性。
根据本实用新型的另一些实施例的道闸控制系统,所述控制模块包括:
逻辑判断单元,用于接收所述第一检测信号则输出第一判断信号;接收所述第一检测信号后接收到所述第二检测信号则输出第二判断信号;接收所述第二检测信号后在所述道闸装置降落时间内接收到所述第三检测信号则输出第三判断信号;
第一控制单元,用于接收所述第一判断信号并输出第一控制信号以控制所述道闸装置抬起;
第二控制单元,用于接收所述第二判断信号并输出第二控制信号以控制所述道闸装置降落;
第三控制单元,用于若接收所述第三判断信号并输出第三控制信号以控制所述道闸装置保持抬起。
根据本实用新型的另一些实施例的道闸控制系统,还包括:
延时模块,用于预设延时时间并输出延时信号,所述控制模块还用于接收所述延时信号以延时控制所述道闸装置降落。
根据本实用新型的另一些实施例的道闸控制系统,还包括:
滤波放大模块,电连接于所述第一检测模块、所述第二检测模块和所述控制模块之间,用于将所述第一检测信号、所述第二检测信号和所述第三检测信号进行滤波放大。
根据本实用新型的另一些实施例的道闸控制系统,还包括:指示模块,与所述控制模块电连接,用于输出指示信号。
根据本实用新型的另一些实施例的道闸控制系统,还包括:抓拍模块,用于抓拍车辆,所述控制模块还用于接收所述第一检测信号以控制所述抓拍模块启动。
根据本实用新型的另一些实施例的道闸控制系统,所述第一检测模块和所述第二检测模块为微波移动物体探测器。
根据本实用新型的另一些实施例的道闸控制系统,所述道闸装置包括:
道闸本体;
驱动单元,用于接收所述第一控制信号驱动所述道闸本体抬起、接收所述第二控制信号驱动所述道闸本体落下、接收所述第三控制信号以驱动所述道闸本体保持抬起。
根据本实用新型的另一些实施例的道闸控制系统,所述控制模块包括:控制芯片以及外围电路,所述控制芯片的型号为stm32f407vg。
根据本实用新型的另一些实施例的道闸控制系统,所述微波移动物体探测器的型号为bgt24ltr11。
本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
图1是本实用新型实施例中道闸控制系统的一具体实施例模块框图;
图2是本实用新型实施例中道闸控制系统的另一具体实施例模块框图;
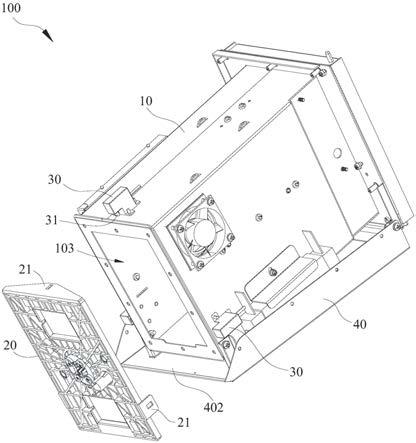
图3是本实用新型实施例中道闸控制系统的一具体实施例示意图;
图4是本实用新型实施例中道闸控制系统的一具体实施例中第一检测模块和第二检测模块的电路原理图;
图5是本实用新型实施例中道闸控制系统的一具体实施例中滤波放大模块的电路原理图;
图6是本实用新型实施例中道闸控制系统的一具体实施例中控制模块的电路原理图;
图7是本实用新型实施例中道闸控制系统的一具体实施例中道闸装置的电路原理图。
附图标记:100、道闸装置;110、道闸本体;120、驱动单元;200、第一检测模块;300、第二检测模块;400、控制模块;410、逻辑判断单元;420、第一控制单元;430、第二控制单元;440、第三控制单元;500、延时模块;600、滤波放大模块;700、指示模块;800、抓拍模块。
具体实施方式
以下将结合实施例对本实用新型的构思及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。
在本实用新型的描述中,如果涉及到方位描述,例如“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。如果某一特征被称为“设置”、“固定”、“连接”、“安装”在另一个特征,它可以直接设置、固定、连接在另一个特征上,也可以间接地设置、固定、连接、安装在另一个特征上。
在本实用新型实施例的描述中,如果涉及到“若干”,其含义是一个以上,如果涉及到“多个”,其含义是两个以上,如果涉及到“大于”、“小于”、“超过”,均应理解为不包括本数,如果涉及到“以上”、“以下”、“以内”,均应理解为包括本数。如果涉及到“第一”、“第二”,应当理解为用于区分技术特征,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
参照图1,本实用新型实施例公开了一种道闸控制系统,包括:道闸装置100、第一检测模块200、第二检测模块300以及控制模块400,第一检测模块200用于检测车辆进入以输出第一检测信号,第二检测模块300用于检测车辆离开以输出第二检测信号,且第二检测模块300还用于检测有人以输出第三检测信号;控制模块400用于接收第一检测信号以控制道闸装置100抬起,控制模块400还用于接收第二检测信号以控制道闸装置100降落,控制模块400还用于若在道闸装置100降落时间内接收到第三检测信号,以控制道闸装置100保持抬起。
其中,第一检测模块200和第二检测模块300分别安装于管理站点的两处,如图3所示,第一检测模块200安装于道闸装置100前方,第二检测装置安装于道闸装置100处。当车辆进入时,第一检测模块200检测到车辆则输出第一检测信号,控制模块400接收到第一检测信号以控制道闸装置100抬起,若车辆进入后未到达第二检测模块300的检测区域,则道闸装置100继续保持抬起。若车辆通过道闸离开后,第二检测模块300检测到车辆离开以输出第二检测信号,则控制模块400接收到第二检测信号以控制道闸装置100降落。当道闸装置100在降落时,若检测到有人则输出第三检测信号,控制模块400如果在道闸降落时间内接收到第三检测信号则控制道闸装置100保持抬起,防止道闸装置100继续下落砸伤人员,从而提高道闸装置100的安全性。若控制装置接收第三检测信号在道闸已经降落时则不控制道闸装置100保持抬起,因为道闸装置100已完全降落则不会砸伤到人员所以无需对道闸装置100进行控制。通过设置第一检测模块200、第二检测模块300和控制模块400以智能控制道闸装置100抬起,而且在道闸装置100降落时若检测到人员则保持抬起防止道闸装置100继续降落以砸伤人员,从而提高道闸装置100的安全性。
参照图2,在一些实施例中,控制模块400包括:逻辑判断单元410、第一控制单元420、第二控制单元430以及第三控制单元440,逻辑判断单元410用于收第一检测信号则输出第一判断信号;逻辑判断单元410还用于接收第一检测信号后接收到第二检测信号则输出第二判断信号;逻辑判断单元410还用于接收第二检测信号后在道闸装置100降落时间内接收到第三检测信号则输出第三判断信号;第一控制单元420用于接收第一判断信号并输出第一控制信号以控制道闸装置100抬起;第二控制单元430用于接收第二判断信号并输出第二控制信号以控制道闸装置100降落;第三控制单元440用于若接收第三判断信号并输出第三控制信号以控制道闸装置100保持抬起。
具体地,当第一检测模块200检测到车辆进入以输出第一检测信号,则逻辑判断单元410接收第一检测信号以输出第一判断信号,第一控制单元420接收到第一判断信号并输出第一控制信号以控制道闸装置100抬起,以便于车辆通过道闸装置100。当第一检测模块200检测到车辆进入后输出第一检测信号,然后第二检测模块300检测车辆离开输出第二检测信号,逻辑判断单元410在接收到第一检测信号后再接收到第二检测信号以输出第二判断信号,则控制模块400根据第二判断信号以控制装置在抬起后降落。若逻辑判断单元410没有接收到第一检测信号时再接收第二检测信号则为视第二检测信号为无效信号,控制模块400不会控制道闸装置100抬起和降落。若第二检测模块300检测车辆离开后检测到有人则输出第三检测信号。若逻辑判断单元410接收第二检测信号后,在道闸装置100降落时间内接收到第三检测信号则输出第三判断信号,控制模块400接收第三判断信号并输出第三控制信号以控制道闸装置100保持抬起,以防止在道闸装置100降落时若出现人站在道闸装置100下以砸伤人员,从而提高了道闸装置100的安全性。若逻辑判断单元410接收第二检测信号在道闸装置100降落时间后接收第三检测信号,则逻辑判断单元410不输出信号,由于道闸装置100在降落时间后已完全降落不会砸到用户,则无需对道闸装置100进行控制。
通过设置逻辑判断单元410准确判断车辆进入和离开,且车辆进入后判断是否有人以输出对应的判断信号,以便于第一控制单元420、第二控制单元430以及第三控制单元440根据对应的判断信号工作以控制道闸装置100抬起、降落和保持抬起,实现道闸装置100的智能化控制且防止道闸装置100砸伤人员,提高了道闸装置100的安全性。
在一些实施例中,道闸控制系统还包括延时模块500,延时模块500用于预设延时时间并输出延时信号,控制模块400还用于接收延时信号以延时控制道闸装置100降落。
其中,延时模块500预设的延时时间可以根据用户需求设置。通过延时模块500预设延时时间以输出延时信号,控制模块400控制道闸装置100降落时接收延时时间以控制道闸装置100延时降落。若控制模块400接收第二检测信号后直接控制道闸装置100降落,对于行驶缓慢的车俩给或者车辆前方有人车主需要停留,直接控制道闸装置100降落会砸到车辆,造成安全隐患。通过延时模块500预设延时时间,则控制模块400接收延时信号后延时降落道闸装置100,以提供车辆完全离开的时间,使得道闸装置100降落更加安全。
在一些实施例中,道闸控制系统还包括滤波放大模块600,滤波放大模块600电连接于第一检测模块200、第二检测模块300和控制模块400之间,用于将第一检测信号、第二检测信号和第三检测信号进行滤波放大。
第一检测信号、第二检测信号和第三检测信号先通过滤波放大模块600进行滤波和放大再输出至控制模块400,使得控制模块400接收稳定的第一检测信号、第二检测信号和第三检测信号,以便于控制模块400能够进行准确地控制,使得道闸装置100更加稳定地抬起和降落。
在一些实施例中,道闸控制系统还包括:指示模块700,指示模块700电连接于控制模块400,且用于输出指示信号。
具体地,当控制模块400接收第一检测信号则控制指示模块700输出第一指示信号,控制模块400接收第一检测信号后未接收到第二检测信号或接收到第三判断信号则控制指示模块700输出第二指示信号。其中指示模块700为绿灯,且第一指示信号为绿灯闪烁一次,第二指示信号为绿灯常亮。
当第一检测模块200检测车辆进入以输出第一检测信号至控制模块400,控制模块400接收第一检测信号并控制绿灯闪烁一次,以提示行人车辆进入,便于用户根据绿灯闪烁一次离开道闸装置100附近。若第二检测模块300检测车辆进入并未离开道闸装置100时,控制模块400控制绿灯常亮,通过绿灯常亮来提示行人。若行人在道闸装置100降落时间内位于道闸装置100,则控制模块400接收第三判断信号以控制绿灯常亮,以提示用户尽快离开。通过设置绿灯的闪烁和常亮来提示用户车辆进入和离开的状态,以及行人是否出现的状态,从而提示行人能够尽快离开道闸装置100附近,从而提高道闸装置100的安全性。
在一些实施例中,道闸控制系统还包括抓拍模块800,抓拍模块800用于抓拍车辆,控制装置接收第一检测信号以控制抓拍模块800启动抓拍车辆。
当第一检测模块200检测车辆进入时输出第一检测信号至控制模块400,控制模块400控制抓拍模块800启动抓拍车辆以获取车辆的照片信息,通过获取车辆的照片信息,以对进入的每一个车辆进行取证,以记录来往车辆。
其中,抓拍装置在本实施例为摄像机,通过摄像机拍照以获取车辆的照片信息。
在一些实施例中,道闸装置100包括:道闸本体110和驱动单元120,驱动单元120,用于接收第一控制信号、第二控制信号和第三控制信号以驱动道闸本体110抬起和落下。
当驱动单元120接收第一控制信号以控制道闸本体110抬起,驱动单元120接收第二控制信号以控制道闸本体110降落,若驱动单元120接收第三控制信号以控制道闸本体110保持抬起。通过对道闸本体110的智能化控制,使得道闸装置100的控制简易且提高道闸装置100的安全性。
在一些实施例中,第一检测模块200和第二检测模块300为微波移动物体探测器u7。其中,微波移动物体探测器u7是通过雷达感应前端、后端信号处理、电路控制、控制信号输出来实现整体功能。其中雷达感应前端通过多普勒效应检测有相对运动时,接收机收到的频率和波源发出的频率不同,而且相对运动的速度越大,接收机收到的频率变化也越大。因此通过设置微波移动物体探测器u7能够准确地检测车辆的进入和离开、以及行人是否出现。
在本实施例中,微波移动物体探测器u7的型号为bgt24ltr11,且微波移动物体探测器u7连接有若干电阻、电感和若干电容,且微波移动物体探测器u7和若干电阻、电感以及若干电容的连接如图4所示,通过微波移动物体探测器u7检测车辆和行人并输出对应的检测信号,且输出对应的检测信号通过微波移动物体探测器u7的第十四引脚输入至滤波放大模块600。
在一些实施例中,滤波放大模块600包括:第一运算放大器ic4c、第二运算放大器ic4d以及外围电路,且第一运算放大器ic4c、第二运算放大器ic4d和外围电路的电路连接参照图5,当第一检测信号、第二检测信号和第三检测信号中任意一个输入第一运算放大器ic4c和第二运算放大器ic4d进行滤波放大,以得到更加准确且稳定的检测信号,以便于控制模块400能够稳定且准确地进行道闸装置100的控制。
在一些实施例中,控制模块400包括:控制芯片以及外围电路,控制芯片的型号为stm32f407vg。
其中,逻辑判断单元410、第一控制单元420、第二控制单元430、第三控制单元440以及延时单元集成于控制芯片上,且控制芯片和外围电路的电路连接参照图6,其中控制芯片包括第一控制芯片ic1c和第二控制芯片ic1b,第一控制芯片ic1c和第二控制芯片ic1b通过控制信号对接收的检测信号进行逻辑判断后输出对应的控制信号。
参照图6,其中,指示模块700为绿灯d27,且绿灯连接有第三十七电阻r37,且绿灯d27正极连接电源,负极连接第三十七电阻r37的一端,第三十七电阻r37的另一端连接控制芯片,通过控制芯片根据检测信号输出对应的电平以控制绿灯点亮或闪烁。
驱动单元120包括:驱动芯片ls2和外围电路;其中,驱动芯片的型号具体为g6k-2f-y-dc5,且驱动芯片ls2和外围电路的电路连接参照图7,其中驱动芯片ls2通过引脚com和no与继电器u2连接。当驱动芯片ls2接收到控制芯片输出的控制信号以控制道闸本体110抬起或降落,因此通过驱动芯片ls2的设置使得道闸本体110的控操作简易。
下面参考图1至图7以一个具体的实施例详细描述根据本实用新型实施例的道闸控制系统。值得理解的是,下述描述仅是示例性说明,而不是对实用新型的具体限制。
当位于道闸本体110前方的微波移动物体探测器u7检测到车辆进入时输出第一检测信号至第一运算放大器ic4c和第二运算放大器ic4d,第一运算放大器ic4c、第二运算放大器ic4d以及外围电路进行滤波放大后输出至控制芯片,控制芯片输出第一控制信号至驱动芯片ls2,驱动芯片ls2根据第一控制芯片以控制道闸本体110抬起。若位于道闸本体110处的微波移动物体探测器u7未检测到车辆离开,即使该微波移动物体探测器u7检测到行人也不会改变当前道闸本体110的状态,因此道闸本体110保持抬起状态。若位于道闸本体110处的微波移动物体探测器u7检测到车辆离开且检测到行人以输出第二检测信号和第三检测信号,则控制芯片判断接收第二检测信号后且在道闸本体110降落时间内接收第三检测信号,则输出第三控制信号,驱动芯片ls2根据第三控制信号控制道闸本体110保持抬起。若道闸本体110处的微波移动物体探测器u7检测车辆离开后未检测到行人以输出第二检测信号,控制芯片判断只接收第二检测信号或在道闸本体110降落时间内未接收到第三检测信号,则输出第三控制信号至驱动芯片ls2,驱动芯片ls2根据第三控制芯片控制道闸本体110降落。通过设置两个微波移动物体探测器u7、控制芯片以及驱动芯片ls2,使得道闸本体110的控制智能化,且防止到道闸本体110砸伤行人,从而提高道闸本体110的安全性。
上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。此外,在不冲突的情况下,本实用新型的实施例及实施例中的特征可以相互组合。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。