1.本发明涉及隧道施工技术领域,特别涉及一种基于碴片形貌的盾构滚刀磨耗监测装置及方法。
背景技术:
2.随着国内外隧道掘进机广泛应用,盾构法施工在隧道施工中已经逐渐成为一种主要施工方法。对于盾构法施工而言,盾构滚刀作为主要的破岩工具。适用于各类岩石地层、卵砾石地层及软硬复合地层,在各种掘进机中广泛使用。
3.由于掘进过程中岩石的不确定性、地层的复杂性,导致刀具受力变化的动态性和刀具磨损形式的不确定性。经长时间切削岩石,滚刀发生非正常磨损或正常磨损到一定程度,就需要更换,由此必然影响盾构掘进效率和施工成本。
4.实践表明,岩碴形状尺寸及其粒径分布是复杂围岩条件和机械掘进性能的间接反馈,通过碴片参数和盾构的运行参数可预测刀具磨损状态。目前。仅凭施工人员的经验判断是否需要进仓换刀,判断准确性因人而异,很可能因为判断失误而引发重大事故发生。因此,需要提供一种基于碴片形貌的盾构滚刀磨耗监测方法。
技术实现要素:
5.本发明提供了一种基于碴片形貌的盾构滚刀磨耗监测装置及方法,其目的是为了解决传统的施工方法无法精确准确预测当前滚刀的磨耗量,无法满足盾构智能化安全高效掘进的需求的问题。
6.为了达到上述目的,本发明的实施例提供了一种基于碴片形貌的盾构滚刀磨耗监测装置,包括:
7.数据采集箱,所述数据采集箱设置在盾构机传送带的一侧;
8.工控机,所述工控机设置在所述数据采集箱的一侧,所述工控机的第一端与所述数据采集箱的第一端电连接,所述工控的第二端与电脑电连接;
9.桁架,所述桁架的第一端架设在盾构机传送带上,所述桁架的第二端架设在地面上;
10.照明装置,所述照明装置设置有两个,两个所述照明装置对称设置在所述桁架的两端上,两个所述照明装置均与所述桁架可拆卸连接;
11.摄像机,所述摄像机设置在所述桁架的顶端,所述摄像机与所述桁架可拆卸连接,所述摄像机与所述数据采集箱的第二端电连接;
12.红外测温仪,所述红外测温仪设置在所述桁架的顶端,所述红外测温仪与所述桁架可拆卸连接,所述红外测温仪与所述数据采集箱的第三端电连接。
13.本发明的实施例还提供了一种基于碴片形貌的盾构滚刀磨耗监测方法,包括:
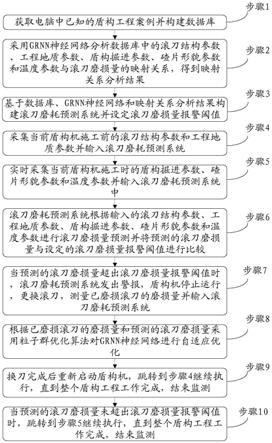
14.步骤1,获取电脑中已知的盾构工程案例并构建数据库;
15.步骤2,采用grnn神经网络分析数据库中的滚刀结构参数、工程地质参数、盾构掘
进参数、碴片形貌参数和温度参数与滚刀磨损量的映射关系,得到映射关系分析结果;
16.步骤3,基于数据库、grnn神经网络和映射关系分析结果构建滚刀磨耗预测系统并设定滚刀磨损量报警阈值;
17.步骤4,采集当前盾构机施工前的滚刀结构参数和工程地质参数并输入滚刀磨耗预测系统;
18.步骤5,实时采集当前盾构机施工时的盾构掘进参数、碴片形貌参数和温度参数并输入滚刀磨耗预测系统中;
19.步骤6,滚刀磨耗预测系统根据输入的滚刀结构参数、工程地质参数、盾构掘进参数、碴片形貌参数和温度参数进行滚刀磨损量预测并将预测的滚刀磨损量与设定的滚刀磨损量报警阈值进行比较;
20.步骤7,当预测的滚刀磨损量超出滚刀磨损量报警阈值时,滚刀磨耗预测系统发出警报,盾构机停止运行,更换滚刀,测量已磨损滚刀的磨损量并输入滚刀磨耗预测系统;
21.步骤8,根据已磨损滚刀的磨损量和预测的滚刀磨损量采用粒子群优化算法对grnn神经网络进行自适应优化;
22.步骤9,换刀完成后重新启动盾构机,跳转到步骤4继续执行,直到整个盾构工程工作完成,结束监测;
23.步骤10,当预测的滚刀磨损量未超出滚刀磨损量报警阈值时,跳转到步骤5继续执行,直到整个盾构工程工作完成,结束监测。
24.其中,所述步骤1具体包括:
25.盾构工程案例包括多条换刀记录,换刀记录包括滚刀结构参数、工程地质参数、盾构掘进参数、碴片形貌参数、温度参数和滚刀磨损量,其中,滚刀结构参数包括刀刃结构参数、滚刀半径、刀间距和载荷重量,工程地质参数包括岩石力学参数、岩石材料参数、岩石的节理和断层参数和岩性参数,盾构掘进参数包括盾构机的贯入度、盾构机刀盘转速、盾构机推力、盾构机工作转矩、盾构机土仓压力和盾构机推进速度,碴片形貌参数包括碴片粒径分布指标、碴片长短轴比值指标和碴片纹理指标,温度参数包括碴片温度。
26.其中,所述步骤2具体包括:
27.将盾构机的贯入度、推进速度、刀盘转速、盾构机推力、盾构机工作转矩、盾构机土仓压力和滚刀半径作为grnn神经网络的输入层的7个神经元,将刀具磨损量作为输出层的神经元,构成grnn神经网络;
28.将数据库中的数据分为100组,采用随机抽样的方法在100组数据内选取10组数据作为测试集,剩余的90组数据作为训练集;
29.将训练集随机分为9个单元,每个单元包括10组数据,采用交叉验证法从9个单元中随机选取8个单元作为训练集输入样本,剩余1个单元作为训练集输出样本,并将训练集输入样本数据归一化到[
‑
1,1]之间,在(0,1]内以步长0.01验证搜索,寻找使得预测值与样本值的均方误差最小的光滑因子σ,并记录当前光滑因子对应的最佳输入样本与最佳输出样本;
[0030]
将测试集数据归一化,将获取的光滑因子σ、最佳输入样本和最佳输出样本作为输入变量,构建4层grnn神经网络,输出层输出刀具磨损量。
[0031]
其中,所述步骤3具体包括:
[0032]
基于grnn神经网络通过相关性分析采集数据库中工程地质参数、盾构掘进参数、盾构滚刀结构、碴片形貌尺寸和温度参数与刀具磨损量的映射关系,建立滚刀磨耗预测系统:
[0033]
δ
i
=β0p β1v β2n β3f β4t β5s β6l
······
β
m
x
m
c
ꢀꢀ
(1)
[0034]
其中,β0、β1、β2、β3、β4····
β
m
是待估计参数,δ
i
为刀具磨损量,p表示盾构机的贯入度,v表示推进速度,n表示刀盘转速,f表示盾构机推力,t表示盾构机工作转矩,l表示滚刀半径,s表示碴片形貌尺寸,x
m
表示其他与刀具磨损量相关的参数,c表示待定常数。
[0035]
其中,所述步骤5具体包括:
[0036]
通过盾构机的主控室实时采集当前盾构机施工时的盾构掘进参数并输入滚刀磨耗预测系统,通过摄像机实时拍摄盾构机传送带上碴片的图片并输入电脑中进行碴片形貌尺寸解算,获得碴片形貌参数并输入滚刀磨耗预测系统,通过红外测温仪实时测量盾构机传送带上碴片的温度并输入滚刀磨耗预测系统。
[0037]
其中,所述步骤8具体包括:
[0038]
采用粒子群优化算法对crnn神经网络进行优化:设置粒子群计算参数,设置滚刀磨耗预测系统发出警报时预测的刀具磨损量与已磨损滚刀的磨损量的均方差为适应度函数,将学习样本和例子带入grnn神经网络,计算适应度值f
i
,比较第i个粒子所经过的所有位置的适应度值,确定其最优位置p
bi
,比较所有粒子在其最优位置p
bi
的适应度值,确定整个种群的最优位置g
b
,根据各粒子自身位置和最优粒子位置调整粒子的速度和位置,当达到迭代终止条件时,得到最优位置g
b
,采用搜索到的最优位置g
b
优化grnn神经网络。
[0039]
本发明的上述方案有如下的有益效果:
[0040]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,根据实际的工程地质参数和滚刀结构参数和实时的掘进参数和碴片参数,能够实时预测滚刀的磨损状态,在预测的滚刀的磨损状态达到设定阈值时提供报警功能,并可以根据不同的工程通过闭环反馈自适应调节提高滚刀磨耗的精确预测。
附图说明
[0041]
图1为本发明的流程图;
[0042]
图2为本发明的结构示意图;
[0043]
图3为本发明的crnn神经网络示意图;
[0044]
图4为本发明的粒子群优化算法的流程图。
[0045]
【附图标记说明】
[0046]1‑
盾构机传送带;2
‑
数据采集箱;3
‑
工控机;4
‑
桁架;5
‑
照明装置;6
‑
摄像机;7
‑
红外测温仪。
具体实施方式
[0047]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0048]
本发明针对现有的施工方法无法精确准确预测当前滚刀的磨耗量,无法满足盾构智能化安全高效掘进的需求的问题,提供了一种基于碴片形貌的盾构滚刀磨耗监测装置及
方法。
[0049]
如图1至图4所示,本发明的实施例提供了一种基于碴片形貌的盾构滚刀磨耗监测装置,包括:数据采集箱2,所述数据采集箱2设置在盾构机传送带1的一侧;工控机3,所述工控机3设置在所述数据采集箱2的一侧,所述工控机3的第一端与所述数据采集箱2的第一端电连接,所述工控的第二端与电脑电连接;桁架4,所述桁架4的第一端架设在盾构机传送带1上,所述桁架4的第二端架设在地面上;照明装置5,所述照明装置5设置有两个,两个所述照明装置5对称设置在所述桁架4的两端上,两个所述照明装置5均与所述桁架4可拆卸连接;摄像机6,所述摄像机6设置在所述桁架4的顶端,所述摄像机6与所述桁架4可拆卸连接,所述摄像机6与所述数据采集箱2的第二端电连接;红外测温仪7,所述红外测温仪7设置在所述桁架4的顶端,所述红外测温仪7与所述桁架4可拆卸连接,所述红外测温仪7与所述数据采集箱2的第三端电连接。
[0050]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,所述桁架4用于支撑所述照明装置5、所述摄像机6和所述红外测温仪7,所述照明装置5用于配合所述摄像机6进行图像数据化,所述红外摄像机6用于实时测量碴片温度。
[0051]
本发明的实施例还提供了一种基于碴片形貌的盾构滚刀磨耗监测方法,包括:步骤1,获取电脑中已知的盾构工程案例并构建数据库;步骤2,采用grnn神经网络分析数据库中的滚刀结构参数、工程地质参数、盾构掘进参数、碴片形貌参数和温度参数与滚刀磨损量的映射关系,得到映射关系分析结果;步骤3,基于数据库、grnn神经网络和映射关系分析结果构建滚刀磨耗预测系统并设定滚刀磨损量报警阈值;步骤4,采集当前盾构机施工前的滚刀结构参数和工程地质参数并输入滚刀磨耗预测系统;步骤5,实时采集当前盾构机施工时的盾构掘进参数、碴片形貌参数和温度参数并输入滚刀磨耗预测系统中;步骤6,滚刀磨耗预测系统根据输入的滚刀结构参数、工程地质参数、盾构掘进参数、碴片形貌参数和温度参数进行滚刀磨损量预测并将预测的滚刀磨损量与设定的滚刀磨损量报警阈值进行比较;步骤7,当预测的滚刀磨损量超出滚刀磨损量报警阈值时,滚刀磨耗预测系统发出警报,盾构机停止运行,更换滚刀,测量已磨损滚刀的磨损量并输入滚刀磨耗预测系统;步骤8,根据已磨损滚刀的磨损量和预测的滚刀磨损量采用粒子群优化算法对grnn神经网络进行自适应优化;步骤9,换刀完成后重新启动盾构机,跳转到步骤4继续执行,直到整个盾构工程工作完成,结束监测;步骤10,当预测的滚刀磨损量未超出滚刀磨损量报警阈值时,跳转到步骤5继续执行,直到整个盾构工程工作完成,结束监测。
[0052]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,采用crnn神经网络分析采集参数与滚刀磨损量的映射关系,根据工程掘进数据及碴片形貌波动变化情况,设定滚刀磨损量报警阈值,提前预测滚刀磨损异常状态特征,精确识别滚刀各种失效情况,如正常磨损、偏磨等;采用神经网络进行预测判断主要过程如下:1.选择神经网络;2.选择学习样本;3.确定输入向量和输出向量;4.设置神经网络参数;5.神经网络学习,构建神经网络模型;6.输入目标对象进行预测判断;使用grnn神经网络结构,grnn神经网络结构包括输入层、模式层、求和层和输出层,使用一部分已有数据对grnn神经网络结构进行训练;输入层的神经元个数为学习样本中输入向量的个数,输入层将多个输入变量输出到模式层,模式层中神经元的个数与学习样本中输入向量的个数相等,模式层中的各神经元对应不同的输入向量,模式层神经元传递函数,如下所示:
[0053][0054]
其中,p
i
表示模式层第i个神经元的输出,x表示学习样本,x=[x1,x2,
…
,x
n
]
t
,x
a
表示学习样本中第a个输入向量,σ表示光滑因子,i表示第i个神经元。
[0055]
求和层中使用两种类型对模式层各神经元的输出进行求和:
[0056]
一类的计算方式为:
[0057][0058]
对模式层的各神经元输出进行算术求和,模式层与各神经元的连接权值为1,求和层神经元传递函数,如下所示:
[0059][0060]
二类的计算方式为:
[0061][0062]
对模式层的各神经元进行加权求和,模式层中第i个神经元与求和层中第j个分子求和神经元之间的连接权值为第i个输出样本y
i
中的第i个元素,求和层神经元传递函数,如下所示:
[0063][0064]
输出层中的神经元数目等于学习样本中输出向量的维数k,各神经元将求和层的输出相除,神经元j的输出,如下所示:
[0065][0066]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,施工前将工程地质、滚刀结构及刀盘结构等参数输入系统作为已知参数,并在施工过程中实时监测盾构机掘进参数及碴片形貌参数并输入系统,预测滚刀的实时磨损量,当滚刀磨损量达到设定的滚刀磨损量报警阈值时报警提示换刀,停机后工人进仓换刀并测量刀具当前磨损状态及磨损量,将结果输入滚刀磨耗预测系统中,进行滚刀磨耗预测系统的反馈自适应调节,保持在当前工程高预测精度条件下,提高滚刀磨耗预测系统预测的鲁棒性,在每次换刀后重复该循环。
[0067]
其中,所述步骤1具体包括:盾构工程案例包括多条换刀记录,换刀记录包括滚刀结构参数、工程地质参数、盾构掘进参数、碴片形貌参数、温度参数和滚刀磨损量,其中,滚刀结构参数包括刀刃结构参数、滚刀半径、刀间距和载荷重量,工程地质参数包括岩石力学参数、岩石材料参数、岩石的节理和断层参数和岩性参数,盾构掘进参数包括盾构机的贯入度、盾构机刀盘转速、盾构机推力、盾构机工作转矩、盾构机土仓压力和盾构机推进速度,碴
片形貌参数包括碴片粒径分布指标、碴片长短轴比值指标和碴片纹理指标,温度参数包括碴片温度。
[0068]
其中,所述步骤2具体包括:将盾构机的贯入度、推进速度、刀盘转速、盾构机推力、盾构机工作转矩、盾构机土仓压力和滚刀半径作为grnn神经网络的输入层的7个神经元,将刀具磨损量作为输出层的神经元,构成grnn神经网络;
[0069]
将数据库中的数据分为100组,采用随机抽样的方法在100组数据内选取10组数据作为测试集,剩余的90组数据作为训练集;
[0070]
将训练集随机分为9个单元,每个单元包括10组数据,采用交叉验证法从9个单元中随机选取8个单元作为训练集输入样本,剩余1个单元作为训练集输出样本,并将训练集输入样本数据归一化到[
‑
1,1]之间,在(0,1]内以步长0.01验证搜索,寻找使得预测值与样本值的均方误差最小的光滑因子σ,并记录当前光滑因子对应的最佳输入样本与最佳输出样本;
[0071]
将测试集数据归一化,将获取的光滑因子σ、最佳输入样本和最佳输出样本作为输入变量,构建4层grnn神经网络,输出层输出刀具磨损量。
[0072]
其中,所述步骤3具体包括:基于grnn神经网络通过相关性分析采集数据库中工程地质参数、盾构掘进参数、盾构滚刀结构、碴片形貌尺寸和温度参数与刀具磨损量的映射关系,建立滚刀磨耗预测系统:
[0073]
δ
i
=β0p β1v β2n β3f β4t β5s β6l
······
β
m
x
m
c
ꢀꢀ
(1)
[0074]
其中,β0、β1、β2、β3、β4····
β
m
是待估计参数,δ
i
为刀具磨损量,p表示盾构机的贯入度,v表示推进速度,n表示刀盘转速,f表示盾构机推力,t表示盾构机工作转矩,l表示滚刀半径,s表示碴片形貌尺寸,x
m
表示其他与刀具磨损量相关的参数,c表示待定常数。
[0075]
其中,所述步骤5具体包括:通过盾构机的主控室实时采集当前盾构机施工时的盾构掘进参数并输入滚刀磨耗预测系统,通过摄像机6实时拍摄盾构机传送带1上碴片的图片并输入电脑中进行碴片形貌尺寸解算,获得碴片形貌参数并输入滚刀磨耗预测系统,通过红外测温仪7实时测量盾构机传送带1上碴片的温度并输入滚刀磨耗预测系统。
[0076]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,所述摄像机6、所述红外测温仪7、所述数据采集箱2和所述工控机3连接通过数据线将图像数据与温度数据传输并存储至电脑内的所述滚刀磨耗预测系统中,通过所述滚刀磨耗预测系统,实时分析当前滚刀磨损情况。
[0077]
其中,所述步骤8具体包括:采用粒子群优化算法对crnn神经网络进行优化:设置粒子群计算参数,设置滚刀磨耗预测系统发出警报时预测的刀具磨损量与已磨损滚刀的磨损量的均方差为适应度函数,将学习样本和例子带入grnn神经网络,计算适应度值f
i
,比较第i个粒子所经过的所有位置的适应度值,确定其最优位置p
bi
,比较所有粒子在其最优位置p
bi
的适应度值,确定整个种群的最优位置g
b
,根据各粒子自身位置和最优粒子位置调整粒子的速度和位置,当达到迭代终止条件时,得到最优位置g
b
,采用搜索到的最优位置g
b
优化grnn神经网络。
[0078]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,盾构机施工前,在所述盾构机传送带1上搭建所述盾构滚刀磨耗监测装置,通过人工采集当前盾构机的滚刀结构参数和工程地质参数并输入所述滚刀磨耗预测系统,盾构机运行时,通过
盾构滚刀磨耗监测装置实时获取盾构机运行过程中的碴片形貌参数和温度参数输入并存储到所述滚刀磨耗预测系统,具体为通过所述摄像机6实时拍摄所述盾构机传送带1上碴片的图片并输入电脑中进行碴片形貌尺寸解算,获得碴片形貌参数输入并存储到所述滚刀磨耗预测系统,通过所述红外测温仪7实时测量所述盾构机传送带1上碴片的温度输入并存储到所述滚刀磨耗预测系统;通过盾构机的主控室实时采集当前盾构机施工时的盾构掘进参数输入并存储到所述滚刀磨耗预测系统;所述滚刀磨耗预测系统根据输入的滚刀结构参数、工程地质参数、盾构掘进参数、碴片形貌参数、温度参数和已有的映射关系分析结果输出当前输入参数对应的滚刀磨损量,判断输出的滚刀磨损量是否超过设定的滚刀磨损量报警阈值,当输出的滚刀磨损量未超过设定的滚刀磨损量报警阈值时,继续下一组参数的滚刀磨损量预测;当输出的滚刀磨损量超过设定的滚刀磨损量报警阈值时,发出警报,停止运行盾构机,工作人员对盾构机的滚刀进行更换,测量当前已磨损滚刀的滚刀磨损量并输入所述滚刀磨耗预测系统进行存储,将当前已磨损滚刀的滚刀磨损量和预测的滚刀磨损量的协方差作为粒子群优化算法的适应度函数寻找最优光滑因子,根据最优光滑因子优化crnn神经网络,启动盾构机,继续下一组参数的滚刀磨损量预测,直到整个盾构工程工作完成,结束监测。
[0079]
本发明的上述实施例所述的基于碴片形貌的盾构滚刀磨耗监测装置及方法,通过采集实际的工程地质参数和滚刀结构参数和实时的掘进参数和碴片参数输入滚刀磨耗预测系统,滚刀磨耗预测系统能够实时预测滚刀的磨损状态,滚刀磨耗预测系统在预测的滚刀的磨损状态达到设定滚刀磨损量报警阈值时提供报警功能,在滚刀磨耗预测系统报警时,根据预测的滚刀磨损量和实际的滚刀磨损量采用粒子群优化算法优化grnn神经网络参数进行优化,减少人为因素对神经网络设计的影响,将grnn神经网络适应性改进,在原有映射关系的基础上,增加自适应改进算法,在保持高预测精度条件下,提高滚刀磨耗预测的鲁棒性,使所述基于碴片形貌的盾构滚刀磨耗监测装置及方法可以根据不同的工程通过闭环反馈自适应调节提高滚刀磨耗的精确预测。
[0080]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

