1.本发明属于水井挖掘领域,尤其涉及一种自由落体式打井机。
背景技术:
2.打井机主要用于开发地下水资源,包括生活用水、农业用水和工业用水等钻井工作,同时也适用于水文地质勘探、建筑工程、桥梁基础打孔等。打井机机结构形式:牵引式、车载式、车载背机式。一般打井机的组成:柴油机、摩擦离合器、变速箱、分动箱、传动轴、泥浆泵、清水泵、真空泵、转盘、水龙头、卷扬机、液压系统、操纵机构、桅杆、钻具、车架等。
3.有的打井机不便于移动,大多数打井机为了实现自由落体式打井,需要不断将钻头抬至高出,然后释放,现有的打井机为了将钻头抬起,往往需要大量的人工操作,步骤复杂,自动化程度低,不便于使用。
技术实现要素:
4.本发明实施例的目的在于提供一种自由落体式打井机,旨在解决现有的打井机不便于移动,大多数打井机为了实现自由落体式打井,需要不断将钻头抬至高出,然后释放,现有的打井机为了将钻头抬起,往往需要大量的人工操作,步骤复杂,自动化程度低,不便于使用的问题。
5.本发明实施例是这样实现的,一种自由落体式打井机,所述自由落体式打井机包括:
6.底板,所述底板上固定安装有主机箱;
7.钻头,设于所述主机箱内部,所述钻头上固定安装有推板;
8.升降装置,固定安装于所述主机箱内部,用于与所述提升组件相配合来带动所述钻头上升;
9.所述升降装置包括控制箱,所述控制箱内部设有第一支板,所述第一支板上安装有第一电机,所述第一电机输出端连接有第一梯形齿轮;
10.第二梯形齿轮,与所述第一支板轴承连接,且与所述第一梯形齿轮之间设有第一连动带;
11.传输组件,安装于所述控制箱内部,用于为所述提升组件提供上升或下降的动力;
12.摆动组件,安装于所述控制箱内部,用于驱动所述传输组件运转来带动所述螺纹杆旋转。
13.本发明实施例提供的一种自由落体式打井机,具有以下有益效果:
14.该装置通过附加提升组件和升降装置,实现了钻头自动进行“上升、自由落体、上升”的往复式运动,实现自动打井的效果,方便使用,减少人工操作,自动化程度高。
附图说明
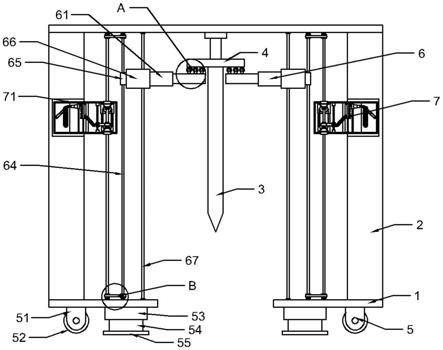
15.图1为本发明实施例提供的一种自由落体式打井机的结构示意图;
16.图2为图1中a处的局部放大图;
17.图3为图1中b处的局部放大图;
18.图4为本发明实施例提供的一种自由落体式打井机中升降装置的结构示意图;
19.图5为图4中c处的局部放大图;
20.图6为本发明实施例提供的一种自由落体式打井机中升降装置内连动盘的侧视图;
21.图7为本发明实施例提供的一种自由落体式打井机中升降装置内联动杆的截面图
22.图8为本发明实施例提供的一种自由落体式打井机中第三支板的局部立体结构图。
23.附图中:1、底板;2、主机箱;3、钻头;4、推板;5、移动定位组件;51、连接柱;52、滚轮;53、支撑气缸;54、支撑气杆;55、定位板;6、提升组件;61、控制气缸;62、控制气杆;63、滑轮;64、螺纹杆;65、螺纹块;66、连接块;67、第四定位杆;7、升降装置;71、控制箱;72、第一支板;73、第一电机;74、第一梯形齿轮;75、第二梯形齿轮;76、第一连动带;77、第三梯形齿轮;78、第四梯形齿轮;79、第二支板;710、摆动杆;711、伸缩槽;712、第一定位杆;713、滑动块;714、导向柱;715、推动弹簧;716、联动杆;717、旋转轮;718、第一连动键;719、第二连动键;720、第三连动键;721、套环;722、第一转盘;723、第二转盘;724、第二连动带;725、联动槽;726、联动键;727、第三支板;729、第一直槽;730、第二直槽;731、支台;732、第一连动柱;733、限位杆;734、滑动槽;735、旋转电机;736、连动盘;737、第二连动柱;738、第二定位杆;739、第三定位杆;740、第一滑动件;741、第二滑动件;742、挡块;743、伸缩杆;744、第一推动块;745、弹簧;746、第二推动块;747、连动轮;748、滑动柱。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
25.以下结合具体实施例对本发明的具体实现进行详细描述。
26.如图1所示,在本发明实施例中,所述自由落体式打井机包括:
27.底板1,所述底板1上固定安装有主机箱2;
28.钻头3,设于所述主机箱2内部,所述钻头3上固定安装有推板4;
29.移动定位组件5,安装在所述底板1上,用于为所述自由落体式打井机的移动提供便利,同时为所述自由落体式打井机的定位提供稳定性;
30.提升组件6,安装于所述主机箱2内部,用于与所述推板4相配合来提升钻头3和释放推板4使钻头3自由落体;
31.升降装置7,固定安装于所述主机箱2内部,用于与所述提升组件6相配合来带动所述钻头3上升;
32.其中,所述升降装置7包括控制箱71,所述控制箱71内部设有第一支板72,所述第一支板72上安装有第一电机73,所述第一电机73输出端连接有第一梯形齿轮74;
33.第二梯形齿轮75,与所述第一支板72转动连接,且与所述第一梯形齿轮74之间设有第一连动带76,用于通过所述第一梯形齿轮来带动所述第二梯形齿轮做同步旋转;
34.传输组件,安装于所述控制箱71内部,用于为所述提升组件6提供上升或下降的动力;
35.摆动组件,安装于所述控制箱71内部,用于驱动所述传输组件运转来带动所述螺纹杆64旋转。
36.在本发明实施例中,底板1为钢板结构,钻头3底端可以是倒置的锥型结构,从而使打井时的施力点更加集中;推板4为钢板结构,水平安装在钻头3的一端,推板4处于水平状态可以确保钻头3的每一次自由落体都可以准确落在同一点上,保证了打井的准确性;主机箱2和钻头3之间可以设置用于限制钻头3下落方向的牵引杆;第二梯形齿轮75与第一支板72之间的连接方式为轴承连接,还可以是其他的连接方式,在此不做赘述。
37.使用时,先通过移动定位组件5将打井机移动至施工位置,并定位,然后启动升降装置7,升降装置7会通过提升组件6带动钻头3上升,待钻头3上升至最高点后,启动提升组件6,使提升组件6与推板4失去配合,则在重力的作用下,钻头3会自由落体进行打井操作;
38.当升降装置7运动至最低点时,再次反向启动提升组件6,使提升组件6再次与推板4相配合,来抬起钻头3,实现自动打井。
39.如图1所示,在本发明实施例中,所述移动定位组件5包括:
40.连接柱51,固定安装在所述底板1一侧,所述连接柱51一端轴承连接有滚轮52;
41.支撑气缸53,固定安装在所述底板1上与连接柱51相同的一侧,所述支撑气缸53内部设有支撑气杆54;
42.定位板55,固定安装在支撑气杆54一端,用于推动所述底板1带动滚轮52脱离地面,使所述自由落体式打井机趋于稳定。
43.使用时,滚轮52可以便于打井机的移动,待打井机移动至施工位置后,启动支撑气缸53,支撑气缸53会通过支撑气杆54将打井机抬起,使滚轮52脱离地面,使打井机在工作时更加稳定。
44.如图1和图2所示,在本发明实施例中,所述提升组件6包括:
45.控制气缸61,所述控制气缸61内部设有控制气杆62,用于与所述推板4相配合,来带动所述钻头3上升并实现自由落体,所述控制气杆62上轴承连接有滑轮63,用于使控制气杆62与推板4之间的滑动更加顺滑,减少摩擦力;
46.螺纹杆64,固定安装在所述底板1与所述主机箱2之间,用于接收所述升降装置7带来的动力并进行旋转;
47.螺纹块65,套设在所述螺纹杆64上,并与所述控制气缸61相连接,用于接收所述螺纹杆64的旋转并带动所述控制气缸61进行上升或下降运动;
48.连接块66,与所述控制气缸61和螺纹块65固定连接,所述底板1和主机箱2之间安装有第四定位杆67,所述连接块66滑动套设在所述第四定位杆67上,用于防止所述螺纹块65在上升或下降时发生旋转。
49.使用时,升降装置7会带动螺纹杆64旋转,进而控制螺纹块65升降,螺纹块65会通过连接块66来带动控制气缸61同步运动,当控制气缸61运动至最低点时,启动控制气缸61将控制气杆62向外推出,并通过控制气杆62和滑轮63将推板4向上抬起,待控制气缸61运动至最高点时,启动控制气缸61将控制气杆62收起,此时在重力作用下,钻头3会实现自由落体。
50.如图3至图6和图8所示,在本发明实施例中,所述升降装置7还包括:
51.第三梯形齿轮77和第四梯形齿轮78,与所述控制箱71侧壁轴承连接,且分别与所述第一梯形齿轮74和所述第二梯形齿轮75相啮合;
52.使用时,第一电机73会带动第一梯形齿轮74旋转,进而通过第一连动带76带动第二梯形齿轮75旋转,进而驱动第三梯形齿轮77和第四梯形齿轮78做方向相反的旋转;
53.摆动组件会带动传输组件不断切换与第三梯形齿轮77和第四梯形齿轮78之间的啮合关系,来带动螺纹杆64做往复式的旋转,来驱动提升组件6做往复式升降的运动。
54.如图3至图6和图8所示,在本发明实施例中,所述传输组件包括:
55.第二支板79,固定安装在所述控制箱71内部;
56.摆动杆710,轴承连接在所述第二支板79中部,所述摆动杆710上开设有伸缩槽711;
57.第一定位杆712,固定安装在所述控制箱71内部,所述第一定位杆712上滑动连接有滑动块713;
58.导向柱714,固定安装在所述滑动块713一侧,用于接收所述摆动杆710所传输的旋转力并将其转化成直线方向上的运动传输给所述滑动块713,所述导向柱714一侧安装有推动弹簧715,所述推动弹簧715与伸缩槽711内壁相连接;
59.联动组件,与滑动块713另一侧相连接,用于切换与所述第三梯形齿轮77和所述第四梯形齿轮78的啮合关系并传输带动所述螺纹杆64旋转。
60.使用时,摆动组件会不断推动摆动杆710做往复式摆动,则摆动杆710会通过导向柱714来带动滑动块713在第一定位杆712上做往复式滑动,同时通过推动弹簧715的弹力,可以实现滑动块713的定位,滑动块713滑动时,会带动联动组件同步运动,实现啮合关系的切换。
61.如图3至图6和图8所示,在本发明实施例中,所述联动组件包括:
62.联动杆716,与所述底板1和所述主机箱2内壁轴承连接,所述联动杆716上滑动套设有旋转轮717,所述旋转轮717两侧固定安装有第一连动键718,用于接收所述第三梯形齿轮77和所述第四梯形齿轮78传输的不同方向的旋转力并传输至所述联动杆716上;
63.同步组件,设于所述联动杆716和所述旋转轮717之间,用于使所述联动杆716可以与所述旋转轮717做同步旋转;
64.第二连动键719和第三连动键720,分别固定安装在所述第三梯形齿轮77和所述第四梯形齿轮78上,用于与所述第一连动键718相配合来带动所述旋转轮717旋转;
65.套环721,与所述旋转轮717轴承连接,且与所述滑动块713相连,用于接收所述滑动块713的移动来带动所述第一连动键718切换与所述第二连动键719和所述第三连动键720之间的啮合关系;
66.第一转盘722和第二转盘723,分别安装在所述联动杆716和所述螺纹杆64上,所述第一转盘722和所述第二转盘723之间设有第二连动带724,用于将所述联动杆716的旋转传输至所述螺纹杆64上,使螺纹杆64可以带动所述提升组件6升降。
67.使用时,滑动块713会通过套环721来带动旋转轮717同步运动,进而不断带动第一连动键718切换与所述第二连动键719和所述第三连动键720之间的啮合关系,使旋转轮717做方向相反的往复式旋转,进而通过同步组件来带动联动杆716旋转,再通过第一转盘722、
第二转盘723和第二连动带724来带动螺纹杆64旋转,来驱动提升组件6运转。
68.如图7所示,在本发明实施例中,所述同步组件包括:
69.联动槽725,开设于所述联动杆716侧部;
70.联动键726,固定安装在所述旋转轮717侧壁且与所述联动槽725相配合。
71.如图3至图6和图8所示,在本发明实施例中,所述摆动组件包括:
72.第三支板727,固定安装在所述控制箱1内部;
73.第一直槽729和第二直槽730,开设于所述第三支板727上,用于为所述摆动组件的运动起到导向作用;
74.支台731,固定安装在所述第三支板727上,所述支台731上固定安装有第一连动柱732;
75.限位杆733,与所述第三支板727相铰接,所述限位杆733上开设有滑动槽734,所述滑动槽734内部设有旋转电机735,所述旋转电机735输出端连接有连动盘736,所述连动盘736上安装有滑动柱748;
76.第二连动柱737,固定安装在所述连动盘736侧部且与所述第一连动柱732相配合,用于在第一连动柱732的限位和旋转电机735的旋转驱动下带动所述限位杆733进行摆动;
77.切换组件,设于所述控制箱71内部,用于与所述摆动组件相配合来带动所述摆动杆710旋转。
78.使用时,启动旋转电机735,旋转电机735会带动连动盘736旋转,进而通过第一连动柱732和第二连动柱737之间的配合,来带动滑动柱748在第一直槽729和第二直槽730中滑动,进而实现限位杆733的摆动,通过限位杆733会带动摆动组件运动。
79.如图3至图6和图8所示,在本发明实施例中,所述切换组件包括:
80.第二定位杆738和第三定位杆739,固定安装在所述控制箱71内部,所述第二定位杆738和第三定位杆739上分别滑动套设有第一滑动件740和第二滑动件741,所述第二滑动件741一侧安装有挡块742;
81.伸缩杆743,一端与所述第一滑动件740固定连接,另一端与所述限位杆733相铰接,用于接收所述限位杆733的旋转力并将其转化为直线方向的力传输给所述第一滑动件740;
82.第一推动块744,固定安装在所述第一滑动件740侧部,所述第一推动块744两端安装有弹簧745,所述弹簧745与挡块742相连;
83.第二推动块746,固定安装在所述第二滑动件741一侧,且与所述摆动杆710相配合,用于推动所述摆动杆710进行摆动,所述摆动杆710上轴承连接有连动轮747,所述连动轮747与挡块742相配合。
84.使用时,限位杆733的摆动会通过伸缩杆743来带动第一滑动件740在第二定位杆738上滑动,进而带动第一推动块744运动,通过弹簧745来推动第二滑动件741滑动,并通过第二推动块746来推动连动轮747,使摆动杆710实现摆动;
85.综上所述,先通过摆动组件限位杆733来带动切换组件运动,并通过切换组件中的第二推动块746来推动摆动杆710旋转,即带动传输组件运动,传输组件会带动联动组件中的旋转轮717不断移动,来使第一连动键718切换与第二连动键719和第三连动键720之间的啮合关系,进而带动使螺纹杆64进行往复式旋转,来带动提升组件6做往复式升降运动,再
通过提升组件6与推板4之间的配合,来带动钻头3做上升、自由落体、再上升的往复式运动,实现自动打井的效果。
86.以此来实现整个升降装置7的全部运动。
87.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

