1.本发明属于航天器测量、控制与应用技术领域,涉及一种用于统一测控设备的高精度星地时差计算方法。
背景技术:
2.通常编队飞行卫星可利用星间链路或者gps信号差分来实现高精度时间同步,但这两种方式对外界条件依赖较严重。统一测控设备对卫星测控有较高的可靠性,但统一测控设备依靠传统手段,以遥测信号时标为基准计算得到星地时差,再将不同卫星的星地时差相减得到星间时差,测量精度只能达到毫秒量级,远不能满足编队飞行卫星高精度时间同步的要求。统一测控设备有较高的距离测量精度,将卫星时间信息放到测量信息中,用单向距离测量结果计算出星地时差,然后再对星间时差进行测量是比较理想的方法,但问题是统一测控设备不同的上行信道之间、不同的下行信道之间均存在时延差异,且同一目标的上下行信道并不是对称的,目前统一测控设备得到的单向距离测量结果均是双向距离除以2,即(测控设备上下行信道距离 空间上下行距离 卫星上下行信道距离)/2,这一结果中只有空间上下行距离是对称的,如果没有办法将测控设备上行信道距离与下行信道距离分离开,也就无法采用距离测量结果来计算星地时差,进而也无法得到精确地星间时差,因此计算星地时差是关键。
技术实现要素:
3.本发明的目的是提供一种用于统一测控设备的高精度星地时差计算方法,可以在不分离测距通道上下行信道时延差的情况下得到时延修正值,用该修正值可得到精确的单向距离传输时延,计算出高精度星地时差,最后得到高精度星间时差。
4.本发明所采用的技术方案是,一种用于统一测控设备的高精度星地时差计算方法,具体按照以下步骤实施:
5.步骤1、标定统一测控设备的测距通道间时延差;
6.步骤2、根据步骤1得到的通道间时差计算空间时延,通过空间时延计算星地时差。
7.本发明的特点还在于:
8.步骤1具体按照以下实施:测距通道上行时延减下行时延差值
△
τ
eud
可表示为统一测控设备上行时延减下行时延差值
△
τ
eud地面
与星上设备上行时延减下行时延差值
△
τ
eud星上
之和,即:
9.δτ
eud
=δ
eud地面
δ
eud星上
ꢀꢀ
(1)
10.公式1中:
11.△
τ
eud
=τ
上行
‑
τ
下行
ꢀꢀ
(2)
12.τ
上行
=(τ
地面上行
τ
星上上行
)
ꢀꢀ
(3)
13.τ
下行
=(τ
地面下行
τ
星上下行
)
ꢀꢀ
(4)
14.△
τ
eud地面
=(τ
地面上行
‑
τ
地面下行
)
ꢀꢀ
(5)
15.△
τ
eud星上
=(τ
星上上行
‑
τ
星上下行
)
ꢀꢀ
(6)。
16.本发明一种用于统一测控设备的高精度星地时差计算方法中主要研究的是解决统一测控设备(简称为地面设备)上下行链路时延差。简化为只标定
△
τ
eud地面
。
17.步骤2中计算空间时延具体按照以下实施:
[0018][0019]
公式(7)称为空间时延公式,其中:
[0020]
τ
空间
为单向空间距离时延;
[0021]
τ为设备上下行时延、卫星上下行时延、双向空间时延之和
[0022]
∑τ
eud
为设备上下行时延和卫星上下行时延之和,包含τ
上行
和τ
下行
。
[0023]
本发明一种用于统一测控设备的高精度星地时差计算方法中主要研究的是解决地面设备时延标定,简化为只考虑地面设备上下行时延。
[0024]
步骤2中计算星地时差具体按照以下实施:
[0025]
地面设备将从下行测量信号中获取星上时间采样信息与地面采样获取的地面时间采样信息进行比较计算,再扣除单向距离传输时延,可得到高精度星地时差
△
t:
[0026][0027]
τ为星地双向时延,t1为上行测量信号发出的时刻,t
′2为星上时间采样值,t
′3为地面时间采样值,
△
τ
eud
为统一测控设备链路上行时延减下行时延差值。
[0028]
本发明的有益效果是:本发明一种用于统一测控设备的高精度星地时差计算方法,可以在不分离测距通道上下行信道时延差的情况下得到时延修正值,用该修正值可得到精确的单向距离传输时延,计算出高精度星地时差,最后得到高精度星间时差。使得通过测距通道来测量编队飞行卫星的星间时差成为可能,采用本方法一方面可使统一测控设备对星间时差的测量精度由毫秒量级提高至纳秒量级,另一方面也为星间时差测量增加了一种可靠性更高的测量方案。
附图说明
[0029]
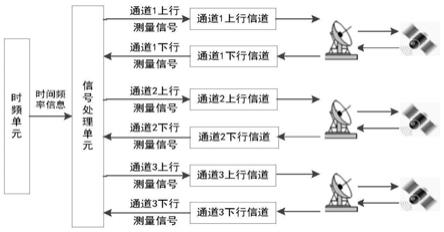
图1是本发明一种用于统一测控设备的高精度星地时差计算方法中统一测控设备三通道测量示意图;
[0030]
图2是本发明一种用于统一测控设备的高精度星地时差计算方法中通道1发上行信号三个通道同时接收示意图;
[0031]
图3是本发明一种用于统一测控设备的高精度星地时差计算方法中通道2发上行信号三个通道同时接收示意图;
[0032]
图4是本发明一种用于统一测控设备的高精度星地时差计算方法中通道3发上行信号三个通道同时接收示意图。
具体实施方式
[0033]
下面结合附图和具体实施方式对本发明进行详细说明。
[0034]
本发明一种用于统一测控设备的高精度星地时差计算方法,具体按照以下步骤实
施:
[0035]
步骤1、标定统一测控设备的测距通道间时延差;
[0036]
步骤1具体按照以下实施:测距通道上行时延减下行时延差值
△
τ
eud
可表示为地面设备上行时延减下行时延差值
△
τ
eud地面
与星上设备上行时延减下行时延差值
△
τ
eud星上
之和,即:
[0037]
δτ
eud
=δ
eud地面
δ
eud星上
ꢀꢀ
(1)
[0038]
公式1中:
[0039]
△
τ
eud
=τ
上行
‑
τ
下行
ꢀꢀ
(2)
[0040]
τ
上行
=(τ
地面上行
τ
星上上行
)
ꢀꢀ
(3)
[0041]
τ
下行
=(τ
地面下行
τ
星上下行
)
ꢀꢀ
(4)
[0042]
△
τ
eud地面
=(τ
地面上行
‑
τ
地面下行
)
ꢀꢀ
(5)
[0043]
△
τ
eud星上
=(τ
星上上行
‑
τ
星上下行
)
ꢀꢀ
(6)。
[0044]
本发明一种用于统一测控设备的高精度星地时差计算方法中主要研究的是解决地面设备上下行链路时延差。简化为只标定
△
τ
eud地面
。
[0045]
步骤2、根据步骤1得到的通道间时差计算空间时延,通过空间时延计算星地时差。
[0046]
步骤2中计算空间时延具体按照以下实施:
[0047][0048]
公式(7)称为空间时延公式,其中:
[0049]
τ
空间
为单向空间距离时延;
[0050]
τ为设备上下行时延、卫星上下行时延、双向空间时延之和
[0051]
∑τ
eud
为设备上下行时延和卫星上下行时延之和,包含τ
上行
和τ
下行
。
[0052]
本发明中主要研究的是解决地面设备时延标定,简化为只考虑地面设备上下行时延。
[0053]
步骤2中计算星地时差具体按照以下实施:
[0054]
地面设备将从下行测量信号中获取星上时间采样信息(以地面钟为基准,星上t2时刻采样值t2′
=t2
△
t,其中
△
t为星地差)与地面采样获取的地面时间采样信息(地面t3时刻采样值t3′
=t3)进行比较计算,再扣除单向距离传输时延,可得到高精度星地时差
△
t:
[0055][0056]
τ为星地双向时延,t1为上行测量信号发出的时刻,t
′2为星上时间采样值,t
′3为地面时间采样值,
△
τ
eud
为统一测控设备链路上行时延减下行时延差值。
[0057]
本发明一种用于统一测控设备的高精度星地时差计算方法,主要研究的是解决地面设备上下行链路时延差。简化为只标定
△
τ
eud地面
。
[0058]
由于在星座高精度星间时差测量的过程中,测量的结果是星座星间的相对时差问题,所以时差标校问题可以归结为对地面设备通道间上下行链路时延差的不一致性。
[0059]
如图1至图4所示,用下标1、2、3分别表示地面设备的三条测距通道,对应三颗卫星。以两条测距通道为例具体说明,三条通道时,通道3的定义与通道2相同。以通道1为参考,通道2相对于通道1的上下行时延差值的不一致性。对地面设备通道2上下行时延差值减
地面设备通道1上下行时延差值定义为
△
τ
eud地面21
。通过计算,
△
τ
eud地面21
等于地面设备两个测距通道时延零值之差(
△
στ
eud地面21
)再扣除两倍的地面设备两个测距通道下行时延之差(2
△
τ
eud地面下行21
)。
[0060]
进一步设:
[0061]
στ
eud地面
表示地面设备上行时延与下行时延之和,即地面设备距离零值或时延零值,有:
[0062]
∑τ
eud地面
=τ
地面上行
τ
地面下行
[0063]
△
στ
eud地面21
表示地面设备链路2上下行时延和与链路1上下行时延和之差,即地面设备两链路距离零值或时延零值之差,有:
[0064]
△
∑τ
eud地面21
=∑τ
eud地面2
‑
∑τ
eud地面1
[0065]
△
τ
地面下行21
表示地面设备链路2下行时延与链路1下行时延之差,即地面设备两链路下行时延的不一致性,有:
[0066]
△
τ
地面下行21
=τ
地面下行2
‑
τ
地面下行1
[0067]
△
τ
eud地面
表示地面设备上行时延与下行时延之差,即:
[0068]
△
τ
eud地面
=τ
地面上行
‑
τ
地面下行
[0069]
△
τ
eud地面21
表示地面设备链路2上下行时延差减去链路1上下行时延差,即地面设备两链路上下行时延差的不一致性,有:
[0070]
△
τ
eud地面21
=
△
τ
eud地面2
‑△
τ
eud地面1
[0071]
则:
[0072]
△
τ
eud地面21
=
△
τ
eud地面2
‑△
τ
eud地面1
[0073]
=(τ
地面上行2
‑
τ
地面下行2
)
‑
(τ
地面上行1
‑
τ
地面下行1
)
[0074]
=(τ
地面上行2
‑
τ
地面上行1
)
‑
(τ
地面下行2
‑
τ
地面下行1
)
[0075]
=(τ
地面上行2
‑
τ
地面上行1
) (τ
地面下行2
‑
τ
地面下行1
)
‑
2(τ
地面下行2
‑
τ
地面下行1
)
[0076]
=(στ
eud地面2
‑
στ
eud地面1
)
‑
2(τ
地面下行2
‑
τ
地面下行1
)
[0077]
=
△
στ
eud地面21
‑2△
τ
地面下行21
[0078]
如图1所示为统一测控设备三个测量通道同时对卫星进行距离测量的示意图,完成时差标定后,在距离测量的同时,可按照技术方案中表述的时差测量公式,计算得到星间时差。
[0079]
从而有,地面设备两个测距通道上下行时延差的不一致性(
△
τ
eud地面21
)等于地面设备两个测距通道上下行时延零值之差(
△
στ
eud地面21
)再扣除2倍的地面设备两个测距通道下行时延的不一致性(2
△
τ
eud地面下行21
)。
[0080]
地面设备只要能分别标定出地面设备两个测距通道间距离零值之差和两个测距通道下行时延之差,即可求出两条测量链路的上下行时延差的不一致性。其中,地面设备两个测距通道上下行时延零值之差(
△
στ
eud地面21
)和两个通道下行时延之差(
△
τ
eud地面下行21
)可以利用校零变频器射频闭环的测试环境,通过不同测距通道之间交叉测量,并进行计算,得到结果。
[0081]
本发明一种用于统一测控设备的高精度星地时差计算方法中,时差标定是标定统一测控设备上行链路时延和下行链路时延的差值,标定结果即为
△
τ
eud地面
。在实际标校过程中,标定单一通道的上下行时延差异是比较困难的,利用本发明一种用于统一测控设备的
高精度星地时差计算方法中的转化公式,可以设法直接标定不同通道间的上下行信道时延差。
[0082]
设通道1上下信道时延差为
△
τ
eud地面1
=τ
地面上行1
‑
τ
地面下行1
,通道2上下信道时延差为
△
τ
eud地面2
=τ
地面上行2
‑
τ
地面下行2
,通道3上下信道时延差为
△
τ
eud地面3
=τ
地面上行3
‑
τ
地面下行3
。
[0083]
首先按图2所示建立设备无线标校环路,通道1发上行测距信号,校零变频器转发后,三个测距通道同时接收下行测距信号,统计当前状态下三个测距通道的距离测量结果,并折算为时延,将结果记录为τ
1发1收
、τ
1发2收
、τ
1发3收
。
[0084]
保持标校状态,按图3所示,通道2发上行测距信号,校零变频器转发后,三个测距通道同时接收下行测距信号,统计当前状态下三个测距通道的距离测量结果,并折算为时延,将结果记录为τ
2发1收
、τ
2发2收
、τ
2发3收
。
[0085]
保持标校状态,按图4所示,通道3发上行测距信号,校零变频器转发后,三个测距通道同时接收下行测距信号,统计当前状态下三个测距通道的距离测量结果,并折算为时延,将结果记录为τ
3发1收
、τ
3发2收
、τ
3发3收
。
[0086]
得到上述结果后,即可进行时差计算:
[0087]
1)计算发信道时延差
[0088]
τ
1发
‑
τ
1发
=0;
[0089]
τ
2发
‑
τ
1发
=τ
2发1收
‑
τ
1发1收
[0090]
τ
3发
‑
τ
1发
=τ
3发1收
‑
τ
1发1收
[0091]
2)计算收信道时延差
[0092]
τ
1收
‑
τ
1收
=0;
[0093]
τ
2收
‑
τ
1收
=τ
1发2收
‑
τ
1发1收
[0094]
τ
3收
‑
τ
1收
=τ
1发3收
‑
τ
1发1收
[0095]
本发明一种用于统一测控设备的高精度星地时差计算方法,可以在不分离测距通道上下行信道时延差的情况下得到时延修正值,用该修正值可得到精确的单向距离传输时延,计算出高精度星地时差,最后得到高精度星间时差。使得通过测量通道来测量编队飞行卫星的星间时差成为可能,采用本方法一方面可使测控设备对星间时差的测量精度由毫秒量级提高至纳秒量级,另一方面也为星间时差测量增加了一种可靠性更高的测量方案。
[0096]
本发明一种用于统一测控设备的高精度星地时差计算方法,根据公式推导,统一测控设备只要能分别标定出设备的两个测量通道间距离零值的不一致性和两个测量通道下行时延的不一致性,即可求出两条测量链路的上下行时延差的不一致性。其中,统一测控设备两个测量通道时延零值之差和下行时延不一致即是需要的标定参数,本发明采用统一测控设备常用的校零变频器射频闭环的测试环境,通过不同通道之间交叉测量,并进行计算,得到最终的标定结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

