一种解算低频角加速度台正弦运动幅值和频率的方法
一、技术领域
1.本发明涉及测控技术与仪器领域,特别是利用圆光栅编码器校准低频角加速度台正弦运动幅值和频率时的输出信号进行处理。
二、
背景技术:
2.低频角加速度台是以固定位置为中心,进行低频率、大幅值正弦角运动的一种专用转台,是评估和校准陀螺仪的重要设备。低频角加速度台的校准能够实现角运动参数的溯源,对于低频角加速度台的旋转精度和陀螺仪的角速度测量精度评定具有重要意义。低频角加速度台进行正弦运动的特点能够充分反应其本身和被校准陀螺仪的动态特性,且由于低频角加速度台的转速较低,容易出现由驱动力不足或阻力变化导致的停滞、退回和蠕动现象,从而能够充分暴露低频角加速度台旋转中的问题。幅值和频率是低频角加速度台正弦运动的重要参数,能够很大程度上反应低频角加速度台的性能。因此校准低频角加速度台正弦运动的幅值和频率参数的重要性不言而喻。
3.圆光栅编码器广泛应用于旋转轴的角运动参数测量,具有较高的测量精度、较好的动态特性且无测量范围的约束。现有的圆光栅编码器安装定位技术较为成熟,将圆光栅编码器应用于低频角加速度台的校准,可灵活方便地加装至低频角加速度台上,具有较强的可操作性。因此,将圆光栅编码器应用于低频角加速度台正弦运动的幅值和频率参数校准是非常合适的。
4.圆光栅编码器的输出信号为相位调制后的正弦信号。信号的相位与被测对象的角位移成比例,信号的瞬时频率与被测对象的瞬时角速率成比例。对于具有这样特点的信号,目前的信号处理方法大多是在频域或时频域中进行解算,得到信号的频谱或时频图后,再进一步进行被测对象运动参数的解算。对于频域的分析方法,因为获取到信号的相位部分可能是非整周期的,所以难以对运动的幅值进行定量估计。对于时频分析方法,在被测对象运动方向改变时,信号的瞬时频率为0,解算得到的瞬时频率会发生畸变,难以得到精确的时频图以对运动参数进行精确估计。对于低频角加速度台的停滞、退回和蠕动现象造成圆光栅编码器输出信号的非理想性,目前的信号处理方法更是难以处理和识别,甚至可能导致参数解算错误。因此,目前存在的圆光栅编码器信号解算方法难以实现对低频角加速度台正弦运动的幅值和频率参数的准确估计。
三、
技术实现要素:
5.为了充分挖掘圆光栅编码器测量低频角加速度台正弦运动的幅值和频率时的输出信号特点,实现对幅值和频率的准确估计,本发明提供了一种解算低频角加速度台正弦运动幅值和频率的方法。
6.本发明采取以下的技术方案:一种解算低频角加速度台正弦运动幅值和频率的方法,其包括以下步骤:
7.(1)信号预处理;
8.(2)寻找过零点并确定过零点处信号斜率的符号;
9.(3)处理由低频角加速度台蠕动和换向导致的异常过零点;
10.(4)计算换向点所在区间;
11.(5)划分换向点所在区间,得到换向点的精确位置;
12.(6)基于换向点的精确位置计算低频角加速度台正弦运动的幅值和频率。
13.所述步骤(1)中,圆光栅编码器输出的两路正交的正弦信号经信号采集系统得到正弦信号的离散点序列u
i
和余弦信号的离散点序列v
i
,i=1,2,...,n。去除直流分量,获得均值为0的信号序列u
i
和v
i
:
[0014][0015][0016]
所述步骤(2)中,对步骤(1)中获得的信号序列u
i
或v
i
,先计算相邻两个离散点x
k
和x
k 1
的乘积mul
k
:
[0017]
mul
k
=x
k
·
x
k 1
[0018]
其中k=1,2,...,n
‑
1。若mul
k
为负数,则说明两个离散点有不同的符号,则取x
k
为过零点,记录x
k
的索引k。再计算过零点处信号斜率的符号:
[0019]
dir
k
=sgn(x
k 2
‑
x
k
‑2)
[0020]
其中,sgn(x)为符号函数,若dir
k
=1,则过零点x
k
处信号的斜率为正,若dir
k
=
‑
1,则过零点x
k
处信号的斜率为负。对另一个信号序列同样执行上述计算,由此得到两个信号序列所有过零点的位置和过零点处信号斜率的符号。
[0021]
所述步骤(3)中,当连续出现2个及以上信号序列u
i
的过零点时,则认为这些连续的过零点为异常过零点。根据信号序列u
i
连续出现的过零点个数的奇偶性,对于异常过零点采用不同的处理方法。如果信号序列u
i
连续出现的过零点个数为奇数,说明低频角加速度台向相反方向转动很少的角位移后继续向原有方向转动,此时取中间的过零点作为后续计算所需要的过零点,并去除其他过零点。如果信号序列u
i
连续出现的过零点个数为偶数,则去除这些连续的过零点。
[0022]
所述步骤(4)中,先计算过零点处低频角加速度台的角运动方向sdir
k
:
[0023]
sdir
k
=dir
k
·
dir
j
[0024]
其中,dir
k
为信号序列u
i
索引为k的过零点u
k
处信号斜率的符号,dir
j
为顺着时间轴搜寻到最近的信号序列v
i
的过零点v
j
处信号斜率的符号,该过零点的索引为j。若sdir
k
=1,则信号序列u
i
相位滞后于信号序列v
i
,若sdir
k
=
‑
1,则信号序列u
i
相位超前于信号序列v
i
。信号序列u
i
与信号序列v
i
相位的超前滞后关系与低频角加速度台的角运动方向相对应。对信号序列u
i
的所有过零点计算sdir
k
,即得到了信号序列u
i
所有过零点处的角运动方向。再判断角运动方向是否变化:
[0025][0026]
其中,为信号序列u
i
紧接着过零点u
k
之后的过零点处的角运动方向,该
过零点的索引为k
。若mdir
k
=1,则角运动方向未发生变化,若mdir
k
=
‑
1,说明角运动方向发生了变化,且换向时刻在信号序列u
i
的第k个采样点和第k
个采样点之间。
[0027]
所述步骤(5)中,根据两路正交信号的特点,可以根据u
i
、v
i
和|u
i
|
‑
|v
i
|的正负将正弦信号的一个周期划分为8个子区间,对应不同的8个角度范围,每个范围的角度估计取中间值。这8个子区间中u
i
、v
i
和|u
i
|
‑
|v
i
|的正负组合各不相同,其对应关系如下表所示:
[0028][0029]
当低频角加速度台的角运动方向sdir
k
=1时,子区间沿时间轴循环递减:
[0030]
{8,7,6,5,4,3,2,1,8,7,6,5
…
}
[0031]
当低频角加速度台的角运动方向sdir
k
=
‑
1时,子区间沿时间轴循环递增:
[0032]
{1,,2,3,4,5,6,7,8,1,2,3,4
…
}
[0033]
当其规律由递增变为递减或由递减变为递增时,则说明角运动方向发生了变化,由此可以确定换向时刻所在的划分子区间。
[0034]
若将低频角加速度台角运动的第一个换向时刻对应的位置视为起点,其角度视为零,则第二个换向时刻对应的角度ang1为:
[0035][0036]
其中,nzero1为第一和第二个换向时刻之间的换向区间之外出现的零点个数,ns1为第一个换向时刻所在的子区间与第一个零点相隔的子区间个数,ns2为第二个换向时刻所在的子区间与最后一个零点相隔的子区间个数。以此类推,可计算出所有相邻换向时刻之间的角位移。
[0037]
所述步骤(6)中,取低频角加速度台m个正弦角运动周期,计算角运动幅值和频率。角运动幅值a为:
[0038][0039]
取换向时刻所在区间的中间时刻作为换向时刻的估计,则角运动频率f为:
[0040][0041]
其中,f
s
为信号的采样频率,n
2m
为最后一个换向时刻对应的采样点索引,n1为第一个换向时刻对应的采样点索引。
四、附图说明
[0042]
图1是低频角加速度台作方向不变的角运动时信号的示意图。
[0043]
图2是信号u
i
出现奇数个连续过零点的示意图。
[0044]
图3是低频角加速度台换向时信号的示意图。
[0045]
图4是信号在一个周期中被划分为8个子区间的示意图。
[0046]
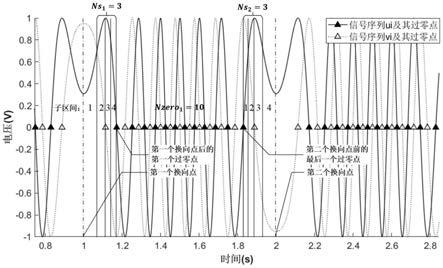
图5是发生前两次换向时信号的局部示意图。
五、具体实施方式
[0047]
下面结合发明内容和附图举例详细说明本发明的具体实施方式。
[0048]
本发明的实施包括以下步骤:
[0049]
(1)信号预处理;
[0050]
(2)寻找过零点并确定过零点处信号斜率的符号;
[0051]
(3)处理由低频角加速度台蠕动和换向导致的异常过零点;
[0052]
(4)计算换向点所在区间;
[0053]
(5)划分换向点所在区间,得到换向点的精确位置;
[0054]
(6)基于换向点的精确位置计算低频角加速度台正弦运动的幅值和频率。
[0055]
所述步骤(1)中,圆光栅编码器输出的两路正交的正弦信号经信号采集系统得到正弦信号的离散点序列u
i
和余弦信号的离散点序列v
i
,i=1,2,...,n。去除直流分量,获得均值为0的信号序列u
i
和u
i
:
[0056][0057][0058]
所述步骤(2)中,对步骤(1)中获得的信号序列u
i
或v
i
,先计算相邻两个离散点x
k
和x
k 1
的乘积mul
k
:
[0059]
mul
k
=x
k
·
x
k 1
[0060]
其中k=1,2,...,n
‑
2。若mul
k
为负数,则说明两个离散点有不同的符号,则取x
k
为过零点,记录x
k
的索引k。再计算过零点处信号斜率的符号:
[0061]
dir
k
=sgn(x
k 2
‑
x
k
‑2)
[0062]
其中,sgn(x)为符号函数,若dir
k
=1,则过零点x
k
处信号的斜率为正,若dir
k
=
‑
1,则过零点x
k
处信号的斜率为负。对另一个信号序列同样执行上述计算,由此得到两个信号序列所有过零点的位置和过零点处信号斜率的符号。
[0063]
所述步骤(3)中,当低频角加速度台作方向不变的角运动时,输出的信号如图1所示,其信号序列u
i
和v
i
的过零点是交替出现的。当连续出现2个及以上信号序列u
i
的过零点时,则认为这些连续的过零点为异常过零点。在低频角加速度台转至换向时刻附近,转速较低的时候,可能会出现由驱动力不足或阻力变化导致的停滞、退回和蠕动现象,此时输出的信号中可能会出现异常的过零点,如图2中用圆圈标记的过零点。低频角加速度台换向时,本身也可能导致异常零点的出现,如图3中用圆圈标记的过零点。
[0064]
根据信号序列u
i
连续出现的过零点个数的奇偶性,对于异常过零点采用不同的处理方法。如果信号序列u
i
连续出现的过零点个数为奇数,说明低频角加速度台向相反方向转动很少的角位移后继续向原有方向转动,此时取中间的过零点作为后续计算所需要的过零点,并去除其他过零点。比如去除图2中的过零点和并保留u
k
用于后续计算。如果信号序列u
i
连续出现的过零点个数为偶数,则去除这些连续的过零点。
[0065]
所述步骤(4)中,先计算过零点处低频角加速度台的角运动方向sdir
k
:
[0066]
sdir
k
=dir
k
·
sdir
j
[0067]
其中,dir
k
为信号序列u
i
索引为k的过零点u
k
处信号斜率的符号,dir
j
为顺着时间轴搜寻到最近的信号序列v
i
的过零点v
j
处信号斜率的符号,该过零点的索引为j。若sdir
k
=1,则信号序列u
i
相位滞后于信号序列v
i
,若sdir
k
=
‑
1,则信号序列u
i
相位超前于信号序列v
i
。信号序列u
i
与信号序列v
i
相位的超前滞后关系与低频角加速度台的角运动方向相对应。对信号序列u
i
的所有过零点计算sdir
k
,即得到了信号序列u
i
所有过零点处的角运动方向。再判断角运动方向是否变化:
[0068][0069]
其中,为信号序列u
i
紧接着过零点u
k
之后的过零点处的角运动方向,该过零点的索引为k
。若mdir
k
=1,则角运动方向未发生变化,若mdir
k
=
‑
1,说明角运动方向发生了变化,且换向时刻在信号序列u
i
的第k个采样点和第k
个采样点之间,如图3中的灰色区域所示。
[0070]
所述步骤(5)中,根据两路正交信号的特点,可以根据u
i
、v
i
和|u
i
|
‑
|v
i
|的正负将正弦信号的一个周期划分为8个子区间。以信号序列u
i
相位超前为例,一个周期的两路正交信号经过区间划分后可以分成如图4所示的8个子区间,对应不同的8个角度范围,每个范围的角度估计取中间值。这8个子区间中u
i
、v
i
和|u
i
|
‑
|v
i
|的正负组合各不相同,其对应关系如下表所示,当信号序列u
i
相位滞后时,对应关系不变。
[0071][0072]
当低频角加速度台的角运动方向sdir
k
=1时,子区间沿时间轴循环递减:
[0073]
{8,7,6,5,4,3,2,1,8,7,6,5
…
}
[0074]
当低频角加速度台的角运动方向sdir
k
=
‑
1时,子区间沿时间轴循环递增:
[0075]
{1,,2,3,4,5,6,7,8,1,2,3,4
…
}
[0076]
当其规律由递增变为递减或由递减变为递增时,则说明角运动方向发生了变化,由此可以确定换向时刻所在的划分子区间。例如图3所示的情况,换向时刻所在的子区间为8。
[0077]
若将低频角加速度台角运动的第一个换向时刻对应的位置视为起点,其角度视为零,则第二个换向时刻对应的角度ang1为:
[0078][0079]
其中,nzero1为第一和第二个换向时刻之间的换向区间之外出现的零点个数,ns1为第一个换向时刻所在的子区间与第一个零点相隔的子区间个数,ns2为第二个换向时刻所在的子区间与最后一个零点相隔的子区间个数。以如图5所示情况为例,nzero1=10,ns1=ns2=3。以此类推,可计算出所有相邻换向时刻之间的角运动位移。
[0080]
所述步骤(6)中,取低频角加速度台m个正弦角运动周期,计算角运动幅值和频率。角运动幅值a为:
[0081][0082]
取换向时刻所在区间的中间时刻作为换向时刻的估计,则角运动频率f为:
[0083][0084]
其中,f
s
为信号的采样频率,n
2m
为最后一个换向时刻对应的采样点索引,n1为第一个换向时刻对应的采样点索引。
[0085]
基于角运动幅值可以进一步计算得到其他角运动参数,如低频角加速度台正弦运动的角加速度幅值a为:
[0086]
a=4π2f2a
[0087]
需要指出的是,以上所描述的具体实施案例,仅用于解释本发明,而非对本发明的限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

