1.本发明主要涉及水下三维扫描领域,具体涉及一种基于十字线扫描的水下三维扫描装置。
背景技术:
2.水下三维扫描技术在水下工程安装和检修、海底沉船、飞机残荷的搜所、海洋生态观测等民用领域,以及水下探雷、探潜、反潜等军用领域都是不可或缺的。
3.传统的激光扫描测绘利用时间差法或三角法进行距离的测量,多借助线结构激光沿着水平或垂直方向扫描实现三维测量,受扫描精度和速度的制约,难以实现快速测量。同时,由于激光在水下传输时衰减、光在传播过程中存在散射和漫射、激光接收设备灵敏度不高等因素,导致水下三维扫描技术一直无法突破扫描结果误差大、作用时间短、扫描速度慢的问题。
4.本技术针对上述现有水下三维扫描存在的问题,提出了一种基于十字线扫描的水下三维扫描装置,其装置安装结构简单、测量速度快。
技术实现要素:
5.本技术实施例提供一种基于十字线扫描的水下三维扫描装置,以解决现有技术中激光扫描速度慢、扫描精度不高的技术问题。
6.为了达到上述目的,本发明实施例所采用的技术方案如下:一种基于十字线扫描的水下三维扫描装置,包括激光扫描装置、十字线激光焦点调整机构、电路控制装置;
7.所述激光扫描装置包括十字线激光器和激光接收器,所述的十字线激光器发射十字线激光脉冲,对所述十字线激光脉冲进行调制,调制后的所述十字线激光脉冲经水体传输后到达待测水下区域,对待测水下区域进行扫描,获得待测水下区域表面点的三维坐标;所述激光接收器用于接收由待测水下区域反射经相同的水体传输返回的回波激光;
8.所述十字线激光焦点调整机构用于根据水下环境的不同调节所述十字线激光器的焦距;
9.所述电路控制装置用于从所述回波激光中提取调制信号,对所述调制信号进行微波信号处理,获得目标距离信息,利用三维模型根据所述三维坐标进行三维重建。
10.进一步地,所述调制采用余弦调制或脉冲调制。
11.进一步地,所述回波激光包括待测水域反射激光和水体后向散射激光。
12.进一步地,所述调制包括脉冲宽度、调制频率和调制深度参数三方面的调节。
13.进一步地于,所述电路控制装置包括dsp处理器、存储模块、外设电源、双口ram模块、lcd显示屏幕,
14.所述双口ram模块分别与所述激光接收器和dsp处理器电连接,用于获取所述激光接收器接收的回波激光,并将所述回波激光传递给dsp处理器;
15.所述外设电源为整个电路控制装置供电;
16.所述存储模块与所述dsp处理器电连接,用于三维坐标;
17.所述dsp处理器还分别与所述十字线激光器和所述十字线激光焦点调整机构电连接,用于控制十字线激光器和十字线激光焦点调整机构;
18.所述lcd显示屏幕与所述dsp处理器电连接,用于显示扫描结果,所述扫描结果包括三维重建的结果、目标距离信息、表面点的三维坐标。
19.进一步地,所述扫描结果还包括待测水下区域的纹理以及反射率。
20.进一步地,通过对待测水下区域进行扫描,还获得待测水下区域表面纹理以及反射率信息。
21.进一步地,所述微波信号处理结果的峰值对应目标距离信息。
22.进一步地,所述激光接收器为高速采集数字式图像传感器,优选为cdd或cmos灯光电图像传感器作为激光信号的接收装置。
23.进一步地,所述的十字线激光器能够产生十字线图案的激光,所述十字线图案可将待测区域分为四个象限,仅需将入射的十字线激光器旋转90
°
就能获得被扫描的待测水下区域整个表面形貌的点云数据,实现被测物的三维形貌感。
24.根据以上技术方案,本发明实施例提供的一种基于十字线扫描的水下三维扫描的装置具有以下有益效果:
25.本发明采用调制激光测距的方法,完成对待测水域表面的采样。经过调制的十字线激光脉冲经水下待扫描区域反射后存在调制信息,可有效区分后向散射信号和水下目标回波信号,由此抑制了水下后向散射,大大提高了信号的信噪比和信号的对比度,可适用于各种复杂的水下环境,水下测量精度高。可准确为dsp处理器提供在水下待扫描区域采集的大量点的坐标、纹理以及折射率的信息。本方法对十字线激光脉冲进行余弦调制,并可调节脉冲宽度、调制频率和调制深度等参数。根据实际探测的水下情况选择合适的参数,使用范围广。
26.本发明采用十字线激光器作为测量光源,利用ccd或cmos等光电图像传感器件作为激光信号接收装置,利用调制激光测距原理实现激光测距功能,得到激光光源的距离,通过十字线激光器,将待测物分为四象限,仅需将入射的十字线光源旋转90
°
就可以获得被扫描物体整个表面形貌的点云数据,实现待测区域的三维形貌感知。该设备具有结构简单、应用灵活、成本低、速度快等特点,可用于潜艇、水下巡检机器人、水下工程安装和检修、水下环境感知和测量。
附图说明
27.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
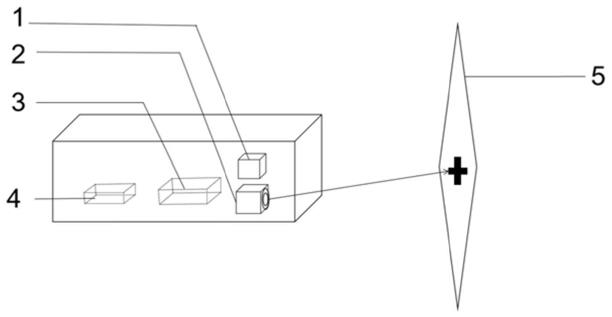
28.图1是本发明实施例提供的一种基于十字线扫描的水下三维扫描装置的结构示意图。
29.图2是本发明实施例提供的一种基于十字线扫描的水下三维扫描装置的具体实现方法流程图。
30.图3是本发明实施例提供的一种基于十字线扫描的水下三维扫描装置中所述的调制激光测距的原理图。
31.图4是本发明实施例提供的一种基于十字线扫描的水下三维扫描装置中所述的电路控制装置结构框图。
32.图中附有的标记为:1为激光接收装置、2为十字线激光器、3为十字线激光器焦点调整机构、4为电路控制装置、5为待测水下区域。
具体实施方式
33.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
34.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
35.参考图1,本发明实施例提供一种基于十字线扫描的水下三维扫描装置,包括激光扫描装置、十字线激光焦点调整机构3、电路控制装置4;所述激光扫描装置包括激光接收器1和十字线激光器2,所述的十字线激光器2可发射十字线激光脉冲,对所述十字线激光脉冲进行调制,调制后的所述十字线激光脉冲经水体传输后到达待测水下区域5,对待测水下区域5进行扫描,获得待测水下区域5表面点的三维坐标;所述激光接收器用于接收由待测水下区域5反射经相同的水体传输返回的回波激光;所述十字线激光焦点调整机构3用于根据水下环境的不同调节所述十字线激光器2的焦距;所述电路控制装置4用于从所述回波激光中提取调制信号,对所述调制信号进行微波信号处理,获得目标距离信息;利用三维模型根据所述三维坐标进行三维重建。
36.根据以上技术方案,本发明实施例采用的是调制激光测距的方法,如图2所示,具体是由十字线激光器2发射十字线激光脉冲,对十字线激光脉冲进行余弦调制或脉冲调制(可调节脉冲宽度、调制频率和调制深度等参数),根据实际探测的水下情况选择合适的参数;调制十字线激光脉冲经传输介质后到达目标,由目标反射经相同的介质返回,回波信号被一高速探测器接收并提取该调制信号进行微波信号处理,所述微波信号处理结果的峰值对应目标距离信息。调制激光测距的具体实现方法如图3所示,所述回波激光包括待测水域反射激光和水体后向散射激光。
37.相比于其他激光测距方法,本实例所使用的调制激光方法具有如下优势:经过调制的十字线激光脉冲经水下待扫描区域反射后存在调制信息,可有效区分后向散射信号和水下目标回波信号,由此抑制了水下后向散射,大大提高了信号的信噪比和信号的对比度,可适用于各种复杂的水下环境,水下测量精度高。可准确为dsp处理器提供在水下待扫描区域采集的大量点的坐标、纹理以及折射率的信息。本方法对十字线激光脉冲进行余弦调制时可根据实际探测的水下情况调节脉冲宽度、调制频率和调制深度等参数,使用范围广。
38.在本实施实例中,所述激光扫描装置为高速采集数字式图像传感器。优选的,cdd或cmos灯光电图像传感器作为激光信号接收装置。
39.如图4所示,在本实施实例中,所述电路控制装置包括dsp处理器、存储模块、外设
电源、双口ram模块、lcd显示屏幕。所述双口ram模块分别与所述激光接收器和dsp处理器电连接,用于获取所述激光接收器接收的回波激光,并将所述回波激光传递给dsp处理器;所述外设电源为整个电路控制装置供电;所述dsp处理器还分别与所述十字线激光器2和所述十字线激光焦点调整机构电连接,用于控制十字线激光器2和十字线激光焦点调整机构;所述lcd显示屏幕与所述dsp处理器电连接,用于显示扫描结果,所述扫描结果包括三维重建的结果、目标距离信息、表面点的三维坐标。
40.在本实施实例中,所述电路控制装置可实现激光测距和水下三维环境的重建。所述外设电源为电路控制装置供电,所述存储模块可用于保存所述激光扫描装置在水下区域表面采集的大量点的三维坐标,纹理,反射率信息。在目标距离、水下环境一定的情况下,所述待测水下区域的反射率大小与激光接收器所获得的数据平均大小成正比,所述待测水下区域的纹理和反射率一一对应。所述lcd显示屏幕,可实时显示一种基于十字线扫描的水下扫描装置的扫描结果,所述扫描结果包括待扫描区域的三维重建结果,十字线激光器2到待扫描区域表面的实时距离,待测区域表面上大量点的三维坐标、纹理以及反射率。
41.相比于现有水下三维扫描装置,本发明采用十字线激光器2作为测量光源,利用ccd或cmos等光电图像传感器件作为激光信号接收装置,利用调制激光测距原理实现激光测距功能,得到激光光源的距离,通过十字线激光器2,将待测物分为四象限,仅需将入射的十字线光源旋转90
°
就可以获得被扫描物体整个表面形貌的点云数据,实现待测区域的三维形貌感知。该装置具有结构简单、应用灵活、成本低、速度快等特点,可广泛用于潜艇、水下巡检机器人、水下工程安装和检修、水下环境感知和测量。
42.在本实施实例中,所述三维模型为包含所述三维坐标的长方体,所述长方体模型的长、宽、高分别平行于以十字线激光器为原点所建立的空间直角坐标系(其中空间直角坐标系的x,y轴平行于待测水下区域,z轴垂直于待测水下区域)x轴,y轴,z轴。
43.在本实施实例中,所述的十字线激光器2能够产生十字线图案的激光,所述十字线图案可将待测区域分为四个象限,仅需将入射的十字线激光器2旋转90
°
就可以获得被扫描环境整个表面形貌的点云数据,实现被测物的三维形貌感。本发明采用基于调制激光测距的方法,在待扫描水下环境表面上采集大量点的三维坐标,纹理、反射率等信息,dsp处理器利用三维模型根据所述采集的大量数据进行重建,实现水下的三维扫描并在lcd显示时显示一种基于十字线扫描的水下扫描装置的扫描结果,所述扫描结果包括待扫描区域的三维重建结果,十字线激光器到待扫描区域表面的实时距离,待测区域表面上大量点的三维坐标、纹理以及反射率。
44.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

