1.本发明涉及惯性传感器、电子设备以及移动体。
背景技术:
2.近年来,正在开发具备利用硅mems(microelectro mechanical system)技术制造的加速度传感器元件或角速度传感器元件的物理量传感器。
3.例如,专利文献1中公开了根据摇臂原理构成并根据随着沿铅垂方向施加的加速度而变化的静电电容来检测加速度的物理量传感器。该物理量传感器具有设置于支撑基板上的第一固定电极及第二固定电极、和相对于由硅基板形成的扭转梁的中心线对称配置的作为可动电极的可动体,可动体的一侧与第一固定电极对置配置,另一侧与第二固定电极对置配置。另外,为了防止可动体的端部与支撑基板接触,在支撑基板上设置有朝向可动体侧突出的突起。即,突起限制可动体的位移,从而抑制可动体与支撑基板接触。
4.专利文献1:日本特开2019
‑
45172号公报
5.然而,专利文献1中记载的物理量传感器存在如下问题:在被施加了过大的加速度时,为了限制可动体的位移而使可动体与突起接触,从而有可能使可动体破损,但没有判定可动体的状况的机构。
技术实现要素:
6.惯性传感器具备:基板;固定电极,配置于所述基板;元件部,包括可动体,所述可动体能够相对于所述固定电极位移,并在第一部分和与所述固定电极相对的第二部分上具有电极;突起,限制所述可动体的位移量,并在与所述可动体的所述第一部分对置的部分上具有检测电极;驱动电路,向所述元件部输出驱动信号;接触检测电路,通过所述可动体的所述第一部分的所述电极与所述突起的所述检测电极接触而输出检测信号;自诊断电路,当从所述接触检测电路接收到所述检测信号时,向所述元件部输出测试信号;以及判定电路,判定所述元件部接收到所述测试信号后输出的信号的电平是否超过了阈值。
7.惯性传感器具备:基板;固定电极及检测电极,配置于所述基板;元件部,包括可动体和突起,所述可动体能够相对于所述固定电极位移,并在与所述固定电极对置的部分上具有电极,所述突起限制所述可动体的位移量,并在与所述检测电极对置的部分上具有电极;驱动电路,向所述元件部输出驱动信号;接触检测电路,通过所述突起的所述电极与所述固定电极接触而输出检测信号;自诊断电路,当从所述接触检测电路接收到所述检测信号时,向所述元件部输出测试信号;以及判定电路,判定所述元件部接收到所述测试信号后输出的信号的电平是否超过了阈值。
8.电子设备具备上述惯性传感器。
9.移动体具备上述惯性传感器。
附图说明
10.图1是表示第一实施方式涉及的惯性传感器的构成的概略立体图。
11.图2是表示加速度传感器元件的构成的概略俯视图。
12.图3是图2的a
‑
a线的概略剖视图。
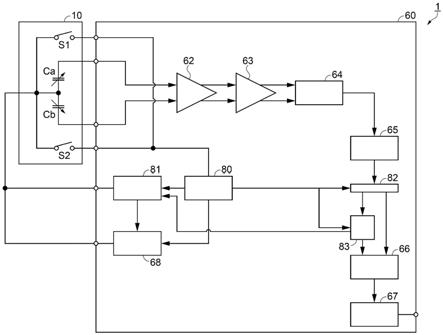
13.图4是表示惯性传感器的概略构成的框图。
14.图5是表示驱动信号的波形的图。
15.图6是表示测试信号的波形的图。
16.图7是表示驱动正常时和异常时的输出电平的图。
17.图8是表示第二实施方式涉及的惯性传感器的构成的概略剖视图。
18.图9是表示第三实施方式涉及的惯性传感器的构成的概略俯视图。
19.图10是图9的b
‑
b线的概略剖视图。
20.图11是表示第四实施方式涉及的惯性传感器的构成的概略俯视图。
21.图12是图11的c
‑
c线的概略剖视图。
22.图13是表示第五实施方式涉及的作为具备惯性传感器的电子设备的智能手机的构成的概略立体图。
23.图14是表示第六实施方式涉及的作为具备惯性传感器的移动体的汽车的构成的概略立体图。
24.附图标记说明
25.1、1a、1b、1c
…
惯性传感器、2
…
封装件、3
…
基座部、4
…
盖部、5
…
密封部件、6
…
凹部、7、8
…
接合线、10
…
加速度传感器元件、20
…
基板、21
…
凹部、22
…
固定部、23
…
突起、24
…
第一固定电极、25
…
第二固定电极、26
…
虚拟电极、27
…
检测电极、28
…
端子配置部、30
…
元件部、31
…
可动体、32
…
保持部、33
…
第一支撑梁、34
…
第二支撑梁、35
…
第一质量部、36
…
第二质量部、37
…
第三质量部、38
…
连结部、40
…
开口部、42
…
第一部分、43
…
第二部分、50
…
盖体、51
…
凹部、60
…
ic、62
…
qv放大器、63
…
可编程增益放大器、64
…
a/d转换电路、65
…
数字滤波器、66
…
存储部、67
…
接口电路、68
…
驱动电路、80
…
接触检测电路、81
…
自诊断电路、82
…
测试模式切换开关、83
…
判定电路、1200
…
作为电子设备的智能手机、1500
…
作为移动体的汽车、ca、cb
…
静电电容、g1
…
阈值的下限值、g2
…
阈值的上限值、j1
…
作为摆动轴的旋转轴、r1、r2
…
输出电平、s1、s2
…
开关。
具体实施方式
26.1.第一实施方式
27.首先,参照图1至图7对第一实施方式涉及的惯性传感器1进行说明。此外,在图2中,为了易于理解,省略了盖体50的图示。另外,在图1至图3中,为了便于说明,省略了配线、端子等,为了易于理解,各构成要素的尺寸比例与实际不同。另外,图1至图3以及以后的图8至图12中的x轴、y轴、z轴是相互正交的坐标轴,将沿着x轴的方向作为“x方向”,将沿着y轴的方向作为“y方向”,将沿着z轴的方向作为“z方向”,箭头的方向为正方向。另外,将z方向的正方向设为“上”或“上方”,将z方向的负方向设为“下”或“下方”进行说明。
28.图1至图4所示的惯性传感器1能够用作可检测z轴的加速度的加速度传感器,能够检测元件的异常。这样的惯性传感器1具有封装件2、收纳在封装件2内的加速度传感器元件
10以及ic(integrated circuit:集成电路)60。
29.封装件2具有基座部3、盖部4、以及将基座部3与盖部4接合的密封部件5。基座部3上设置有上方开口的凹部6,基座部3的上方配置有密封部件5。
30.凹部6中配置有加速度传感器元件10和ic60,该ic60层叠在加速度传感器元件10上且通过粘接剂等进行粘接,层叠有ic60的加速度传感器元件10的与层叠有ic60的面相反侧的面通过粘接剂等粘接固定在凹部6的内底面上。另外,凹部6的内部通过利用配置于基座部3上方的密封部件5接合盖部4而被气密性地密封。
31.加速度传感器元件10通过接合线7与ic60电连接。另外,ic60通过接合线8与设置于封装件2内的未图示的电极垫电连接。由此,可以通过ic60的物理量检测电路将加速度传感器元件10检测到的信号作为加速度信号输出,可以通过ic60的异常检测电路检测加速度传感器元件10的破损等导致的异常。
32.加速度传感器元件10能够检测z方向的加速度。这样的加速度传感器元件10具有基板20、配置于基板20上的元件部30、以及与基板20接合并覆盖元件部30的盖体50。
33.如图2所示,基板20在x方向和y方向上扩展,并将z方向作为厚度。另外,如图3所示,基板20上形成有上面侧开口的凹部21。在从z方向俯视观察时,该凹部21将元件部30内包在内侧,并被形成为比元件部30大。凹部21作为抑制元件部30与基板20接触的退避部发挥作用。另外,基板20具有从凹部21的底面向元件部30侧突出的固定部22和突起23,在从z方向俯视观察时,凹部21的底面上配置有与元件部30重叠的第一固定电极24、第二固定电极25以及虚拟电极26。并且,固定部22的上表面与元件部30接合。另外,在从z方向俯视观察时,突起23配置于与后述的元件部30的第一质量部35及第二质量部36重叠的位置。
34.另外,在基板20上,在未形成有凹部21的盖体50侧的上表面即端子配置部28上设置有分别与元件部30、第一固定电极24、第二固定电极25、虚拟电极26以及形成于后述的突起23上的检测电极27电连接的未图示的端子。
35.突起23在可动体31产生了过度的跷跷板式摆动时与可动体31接触,从而作为限制可动体31因为过多的跷跷板式摆动而引起的位移量的止动件发挥作用。另外,在突起23的与元件部30相对的面上设置有检测电极27。通过设置这样的突起23,在可动体31产生了过度的跷跷板式摆动时,通过检测电极27与可动体31接触而作为检测突起23与可动体31接触的开关发挥作用。
36.作为基板20,可以使用例如由包含na
等作为可动离子的碱金属离子的玻璃材料,例如pyrex(注册商标)玻璃、tempax(注册商标)玻璃这样的硼硅酸玻璃构成的玻璃基板。但是,基板20并无特别限定,例如也可以使用硅基板或陶瓷基板。
37.如图3所示,盖体50形成有下面侧开口的凹部51。盖体50将元件部30收纳在凹部51内并与基板20的上表面接合。而且,通过盖体50和基板20形成内侧收纳元件部30的收纳空间s。收纳空间s优选为气密性空间,封装有氮、氦、氩等惰性气体,在使用温度
‑
40℃~125℃左右下大致为大气压。但是,收纳空间s的气氛并无特别限定,例如,既可以是减压状态,也可以是加压状态。
38.作为这样的盖50,例如可以使用硅基板。但是,并不特别限定于此,例如也可以使用玻璃基板或陶瓷基板。另外,基板20与盖体50的接合方法并无特别限定,只要根据基板20或盖体50的材料适当地进行选择即可,例如可以使用阳极接合、使通过照射等离子体而被
激活的接合面彼此接合的活性接合、利用玻璃熔块等的接合材料的接合、使形成于基板20的上表面和盖体50的下表面上的金属膜彼此接合的扩散接合等。
39.元件部30例如通过蚀刻、尤其是作为深槽刻蚀技术的bosch工艺对掺杂有磷(p)、硼(b)、砷(as)等杂质的导电性的硅基板进行图案形成而形成。此外,元件部30的构成材料并不限定于硅基板,例如也可以使用玻璃基板或陶瓷基板。但是,在使用非导电性的玻璃基板或陶瓷基板的情况下,需要在与基板20侧的面的突起23相对的第一部分42、和与第一固定电极24及第二固定电极25相对的第二部分43上形成电极。在本实施方式中,由于元件部30是导电性的硅基板,因而第一部分42和第二部分43相当于电极,因此,不需要形成电极。
40.如图2所示,元件部30具有:与固定部22的上表面接合的保持部32;能够相对于第一固定电极24和第二固定电极25位移的可动体31;能够使可动体31相对于保持部32围绕作为沿着y轴的摆动轴的旋转轴j1位移的第二支撑梁34;以及连接第二支撑梁34与保持部32的第一支撑梁33。固定部22和保持部32例如被阳极接合,第一支撑梁33及第二支撑梁34经由保持部32将可动体31与安装部22连接。
41.在从z方向俯视观察时,可动体31呈以x方向为长度方向的长方形形状。另外,在从z方向俯视观察时,可动体31具有第一质量部35和第二质量部36以及与第二质量部36连接的第三质量部37,该第一质量部35和第二质量部36夹着沿y轴的旋转轴j1而配置。第一质量部35相对于旋转轴j1位于正x方向侧,第二质量部36和第三质量部37相对于旋转轴j1位于负x方向侧。另外,相对于旋转轴j1位于负x方向侧的第二质量部36及第三质量部37的x方向的长度比第一质量部35长,施加z方向的加速度时围绕旋转轴j1的旋转力矩比相对于旋转轴j1位于正x方向侧的第一质量部35大。
42.通过该旋转力矩之差,使得可动体31在施加了z方向的加速度时绕旋转轴j1进行跷跷板式摆动。此外,所谓跷跷板式摆动是指:当第一质量部35向正z方向位移时,第二质量部36向负z方向位移,反之,当第一质量部35向负z方向位移时,第二质量部36向正z方向位移。
43.另外,可动体31的第一质量部35和第二质量部36通过连结部38连结,并且,可动体31具有位于第一质量部35与第二质量部36之间的开口部40。而且,开口部40内配置有保持部32、第一支撑梁33以及第二支撑梁34。这样,通过将保持部32、第一支撑梁33以及第二支撑梁34配置于可动体31的内侧,能够实现元件部30的小型化。另外,可动体31在其整个区域内具有均匀地形成的多个贯通孔。由此,能够减少粘性引起的阻尼。但是,贯通孔既可以省略,也可以不均匀地配置。
44.另外,在可动体31中,沿y方向排列的连结部38与保持部32经由第一支撑梁33及沿y方向延伸的第二支撑梁34连接。因此,能够将第二支撑梁34作为旋转轴j1,使可动体31绕旋转轴j1以跷跷板式摆动的方式进行位移。
45.接着,对配置于凹部21的底面上的第一固定电极24、第二固定电极25以及虚拟电极26进行说明。
46.如图2及图3所示,在从z方向俯视观察时,第一固定电极24与第一质量部35重叠配置,第二固定电极25与第二质量部36重叠配置。在从z方向俯视观察时,该第一固定电极24和第二固定电极25被设置为相对于旋转轴j1大致对称,以使在未施加z方向的加速度的自然状态下后述静电电容ca、cb相等。
47.另外,虚拟电极26位于比第二固定电极25更靠负x方向侧的位置处,并与第三质量部37重叠设置。这样,通过利用虚拟电极26覆盖凹部21的底面,能够抑制凹部21的底面随着基板20中的碱金属离子的移动而带电。因此,能够有效地抑制在凹部21的底面与第二质量部36之间产生可能导致可动体31误动作的意料之外的静电引力。因此,成为能够更高精度地检测z方向的加速度的加速度传感器元件10。
48.虽未图示,但在加速度传感器元件10的驱动时,经由未图示的配线向元件部30施加驱动电压,第一固定电极24与qv放大器以及第二固定电极25与另一个qv放大器分别通过未图示的配线连接。由此,在第一质量部35与第一固定电极24之间形成静电电容ca,在第二质量部36与第二固定电极25之间形成静电电容cb。在未施加z方向的加速度的自然状态下,静电电容ca、cb彼此大致相等。
49.当对加速度传感器元件10施加z方向的加速度时,可动体31以旋转轴j1为中心进行跷跷板式摆动。通过该可动体31的跷跷板式摆动,第一质量部35和第一固定电极24的间隙与第二质量部36和第二固定电极25的间隙反相地变化,与此相应地,静电电容ca、cb相互反相地变化。因此,加速度传感器元件10能够根据静电电容ca、cb的变化检测z方向的加速度。
50.接着,对ic60的构成和动作进行说明。
51.ic60具有检测加速度等的物理量检测电路、和检测由可动体31与突起23的接触引起的异常的异常检测电路。
52.如图4所示,ic60的物理量检测电路的构成包括qv放大器(qva)62、可编程增益放大器(pga)63、a/d转换电路(adc)64、数字滤波器65、存储部66、接口电路67以及驱动电路68。
53.驱动电路68根据时钟信号向加速度传感器元件10的元件部30施加图5所示的驱动信号。然后,加速度传感器元件10检测出的检测信号经由端子被输入qv放大器62。
54.qv放大器62将从加速度传感器元件10输出的电荷的差分信号对转换成电压的差分信号对并输出。
55.可编程增益放大器63被输入从qv放大器62输出的差分信号对、换言之为差分的电压信号,输出将该差分信号对放大后的差分信号对。
56.a/d转换电路64将从可编程增益放大器63输出的差分信号对的电压信号即模拟信号转换为数字信号。
57.数字滤波器65根据时钟信号对从a/d转换电路64输出的数字信号进行滤波处理。由于从a/d转换电路64输出的数字信号中叠加有通过a/d转换电路64的a/d转换处理产生的高频噪声,因此,数字滤波器65作为减少该高频噪声的低通滤波器发挥作用。在从该数字滤波器65输出的数字信号中,分时包含具有与z轴加速度的大小及方向对应的数字值的z轴加速度信号。因此,由qv放大器62、可编程增益放大器63、a/d转换电路64以及数字滤波器65构成的电路作为加速度信号生成电路发挥作用,该加速度信号生成电路是根据从检测相对于z轴的加速度的加速度传感器元件10输出的差分信号对,生成与相对于z轴检测到的加速度的大小相对应的加速度信号的物理量信号生成电路。
58.存储部66具有寄存器和非易失性存储器。非易失性存储器中存储有相对于物理量检测电路所包含的各电路的各种数据,例如可编程增益放大器63的增益调整数据、数字滤
波器65的滤波器系数等的各种信息。非易失性存储器例如可以构成为monos(metal oxide nitride oxide silicon:金属氧化氮氧化硅)型存储器、eeprom(electrically erasable programmable read only memory:电可擦除可编程只读存储器)。在物理量检测电路的电源接通时,非易失性存储器中存储的各种数据被传送并保存于寄存器中,保存于寄存器中的各种数据被供给至各电路。
59.另外,寄存器中作为n位的加速度数据存储有从数字滤波器65输出的加速度信号。
60.接口电路67是用于将与上述相对于z轴检测到的加速度的大小相对应的z轴加速度信号以数字信号的形式经由串行通信用配线图案输出,另外经由串行通信用配线图案与惯性传感器1的未图示的外部装置进行通信的电路。该外部装置可以经由接口电路67相对于存储部66进行数据的写入和读出。接口电路67例如既可以是3端子或4端子的spi(serial peripheral interface:串行外设接口)接口电路,也可以是2端子的i2c(inter integrated circuit:集成电路总线)接口电路。例如,外部装置能够读出存储于存储部66的寄存器中的加速度数据和标志信息,并使用加速度数据进行各种处理。
61.接着,如图4所示,ic60的异常检测电路的构成包括接触检测电路80、自诊断电路81、测试模式切换开关82以及判定电路83。
62.开关s1、s2由加速度传感器元件10的可动体31和设置于突起23上的检测电极27构成,通过可动体31与检测电极27接触而导通。接触检测电路80在检测到开关s1或开关s2导通而传递的驱动信号时,输出检测信号。
63.此外,驱动电路68在从接触检测电路80接收到检测信号时,停止输出驱动信号。
64.自诊断电路81在从接触检测电路80接收到检测信号时,向加速度传感器元件10的元件部30输出测试信号。此外,测试信号是所谓的图6所示的线性调频信号,为了与驱动频率或可动体31破损时的共振频率相对应而由多个频率构成。
65.另外,自诊断电路81通过从接触检测电路80检测到驱动信号开始在规定时间、例如1秒~2秒内保留测试信号的输出,从而能够准确地判定可动体31的破损等。
66.测试模式切换开关82在从接触检测电路80接收到检测信号时,被施加测试信号并将从元件部30输出的信号输入判定电路83。此外,测试模式切换开关82在未从接触检测电路80接收到检测信号时,即可动体31与检测电极27未接触时,正常驱动,将从数字滤波器65输出的加速度信号存储至存储部66中。
67.判定电路83判定元件部30接收测试信号并输出的信号的电平是否超过阈值。具体而言,由于被施加测试信号并从数字滤波器65输出的信号是时间序列的数据,因此,在判定电路83中,在进行快速傅立叶变换(fast fourier transform)而变换为频率之后,对存储于存储部66中的输出特性的阈值的下限值g1及上限值g2与变换后的频率进行比较。如图7所示,驱动正常的输出电平r1收敛于虚线所示的阈值的下限值g1及上限值g2的范围内,但可动体31破损而驱动异常的输出电平r2受到随着可动体31破损而产生的噪声n的影响而超过阈值的上限值g2。因此,输出电平r2被判断为异常,并作为异常检测标志被存储在存储部66的寄存器中。
68.另外,判定电路83在判断为输出电平正常时,向自诊断电路81输出测试信号停止信号,停止输出测试信号。从判定电路83接收到测试信号停止信号的自诊断电路81向驱动电路68输出使其输出驱动信号的开始信号,从驱动电路68输出驱动信号。
69.另外,接口电路67在元件部30接收到测试信号后输出的信号的电平超过阈值的下限值g1及上限值g2的范围时,输出警告信号。
70.如上所述,本实施方式的惯性传感器1具备加速度传感器元件10,该加速度传感器元件10包括基板20;固定电极24、25,配置于基板20上;元件部30,包括可动体31,该可动体31能够相对于固定电极24、25位移,并在第一部分42和与固定电极24、25相对的第二部分43上具有电极;以及突起23,限制可动体31的位移量,并在与可动体31的第一部分42对置的部分具有检测电极27。另外,具备ic60,该ic60具有异常检测电路,该异常检测电路包括:驱动电路68,向元件部30输出驱动信号;接触检测电路80,通过可动体31的第一部分42的电极与突起23的检测电极27的接触而输出检测信号;自诊断电路81,当从接触检测电路80接收到检测信号时,向元件部30输出测试信号;以及判定电路83,判定元件部30接收到测试信号后输出的信号的电平是否超过阈值。因此,加速度传感器元件10的导电性的可动体31和设置于突起23上的检测电极27作为开关发挥作用,能够通过ic60的异常检测电路检测出可动体31和突起23处于接触状态。另外,由于具备异常检测电路,因此,在可动体31与突起23接触时,能够检测出因为可动体31的状态处于发生了破损的状态而引起的异常。因此,能够得到具有检测可动体31已破损的机构的惯性传感器1。
71.2.第二实施方式
72.接着,参照图8对第二实施方式涉及的惯性传感器1a进行说明。
73.本实施方式的惯性传感器1a与第一实施方式的惯性传感器1相比,除了加速度传感器元件10a的结构不同以外,其他与第一实施方式的惯性传感器1相同。此外,以与上述第一实施方式的不同点为中心进行说明,省略相同事项的说明。
74.如图8所示,惯性传感器1a在加速度传感器元件10a的盖体50a的凹部51中设置有朝向可动体31侧突出的突起23a。突起23a与第一质量部35及第二质量部36相对,在从z方向俯视观察时,配置于与第一质量部35及第二质量部36重叠的位置处。另外,在突起23a的与可动体31相对的面上设置有检测电极27a。
75.通过采用这样的构成,利用由导电性材料构成的可动体31和设置于突起23a的检测电极27a,作为检测突起23a与可动体31接触的开关发挥作用,能够得到具有与第一实施方式相同的效果的惯性传感器1a。
76.3.第三实施方式
77.接着,参照图9及图10对第三实施方式涉及的惯性传感器1b进行说明。此外,为了便于说明,图9省略了盖体50和元件部30b的图示。
78.本实施方式的惯性传感器1b与第一实施方式的惯性传感器1相比,除了加速度传感器元件10b的结构不同以外,其他与第一实施方式的惯性传感器1相同。此外,以与上述第一实施方式的不同点为中心进行说明,省略相同事项的说明。
79.如图9和图10所示,惯性传感器1b在元件部30b的可动体31b的基板20b侧的面上设置有朝向基板20b侧突出的突起23b。突起23b设置于第一质量部35及第二质量部36上,在从z方向俯视观察时,配置于基板20b的凹部21的底面上且与设置于第一固定电极24b及第二固定电极25b的开口部44、45内的检测电极27b重叠的位置处。
80.通过采用这样的构成,利用由导电性材料构成的可动体31b和设置于基板20b上的检测电极27b,作为检测可动体31b的突起23b与基板20b接触的开关发挥作用,能够得到具
有与第一实施方式相同的效果的惯性传感器1b。
81.4.第四实施方式
82.接着,参照图11及图12对第四实施方式涉及的惯性传感器1c进行说明。此外,为了便于说明,图11省略了盖体50c的图示。
83.本实施方式的惯性传感器1c与第一实施方式的惯性传感器1相比,除了加速度传感器元件10c的结构不同以外,其他与第一实施方式的惯性传感器1相同。此外,以与上述第一实施方式的不同点为中心进行说明,省略相同事项的说明。
84.图11及图12所示的加速度传感器元件10c是检测x方向的加速度的传感器元件。加速度传感器元件10c具有基板20c、配置于基板20c上的元件部30c、以及与基板20c接合并覆盖元件部30c的盖体50c。
85.如图11所示,基板20c在x方向和y方向上扩展,并将z方向作为厚度。另外,如图12所示,基板20c上形成有上面侧开口的凹部21c。在从z方向俯视观察时,该凹部21c将元件部30c内包于内侧,并被形成为比元件部30c大。凹部21c作为抑制元件部30c与基板20c接触的退避部发挥作用。另外,基板20c具有从凹部21c的底面朝向元件部30c侧突出的多个安装部22a、22b、22c。在从z方向俯视观察时,安装部22a、22b配置于凹部21c的底面的y方向的正侧和负侧。在从z方向俯视观察时,安装部22c配置于凹部21c的底面的x方向的正侧和负侧。另外,在安装部22c的盖体50c侧的面上固定有沿x方向延伸的突起23c。在从x方向剖视观察时,突起23c与元件部30c的可动体31c重叠,并朝向可动体31c侧突出。此外,在本实施方式中,将突起23c固定于基板20c上,但并不限定于此,也可以将突起23c固定于盖体50c上。
86.突起23c在对元件部30c的可动体31c施加了过度的x方向加速度时与可动体31c接触,从而作为限制可动体31c因未过多的x方向加速度而引起的位移量的止动件发挥作用。另外,在突起23c的与元件部30c相对的面上设置有检测电极27c。通过设置这样的突起23c,在对可动体31c施加了过度的x方向加速度时,检测电极27c与可动体31c接触,从而作为检测突起23c与可动体31c接触的开关发挥作用。
87.如图12所示,盖体50c形成有下面侧开口的凹部51。盖体50c将元件部30c收纳在凹部51内并与基板20c的上表面接合。而且,通过盖体50c和基板20c形成内侧收纳元件部30c的收纳空间s。
88.如图11和图12所示,元件部30c包括可动体31c、弹簧部72、固定部73以及固定检测电极74、75。
89.可动体31c由导电性的硅基板形成,具有沿x方向延伸的基部71和从基部71向y方向两侧突出的多个可动检测电极76。这样的可动体31c在基部71的两端部经由弹簧部72与固定部73连接。另外,固定部73固定在从凹部21c的底面突出的安装部22a上。由此,可动体31c能够相对于固定部73在x方向上位移。另外,固定检测电极74、75固定在从凹部21c的底面突出的安装部22b上,并夹着可动检测电极76而设置。即,可动检测电极76与固定检测电极74、75配置为梳齿形状。
90.此外,虽未图示,但在基板20c上设置有与可动体31c电连接的配线、与固定检测电极74电连接的配线、与固定检测电极75电连接的配线、以及与检测电极27c电连接的配线,这些配线延伸至基板20c的端子配置部28。另外,经由所述配线从ic60向可动体31c、固定检测电极74以及固定检测电极75施加驱动信号,从而在可动检测电极76与固定检测电极74、
75之间分别形成静电电容。
91.这样的加速度传感器元件10c能够如下那样检测x方向的加速度。当对加速度传感器元件10c施加x方向的加速度时,根据加速度的大小,可动体31c在使弹簧部72弹性变形的同时在x方向上位移。通过可动体31c的位移,可动检测电极76与固定检测电极74的间隙以及可动检测电极76与固定检测电极75的间隙发生变化,伴随于此,它们之间的静电电容发生变化。因此,能够根据该静电电容的变化来检测x方向的加速度。
92.通过采用这样的构成,利用由导电性材料构成的可动体31c和设置于突起23c上的检测电极27c,作为检测可动体31c与突起23c接触的开关发挥作用,能够得到具有与第一实施方式相同效果的检测x方向加速度的惯性传感器1c。
93.5.第五实施方式
94.接着,作为第五实施方式涉及的具备惯性传感器1、1a、1b、1c的电子设备的一例,列举智能手机1200,并参照图13进行说明。此外,在以下的说明中,例示应用惯性传感器1的构成进行说明。
95.作为电子设备的智能手机1200如图13所示嵌入有上述惯性传感器1。作为通过惯性传感器1检测到的加速度等检测信号的检测数据,被发送至智能手机1200的控制部1201。控制部1201包括cpu(central processing unit)而构成,并且,能够从接收到的检测数据识别智能手机1200的姿势或行为,并改变显示部1208中显示的显示图像、发出警告音或效果音、或者使振动电机进行驱动而使主体振动。换言之,能够进行智能手机1200的运动感测,根据测量出的姿势或行为改变显示内容、或者产生声音或振动等。尤其是,在执行游戏的应用程序的情况下,能够感受到接近于现实的临场感。
96.此外,除了上述的智能手机1200以外,惯性传感器1、1a、1b、1c例如还可以适用于个人计算机、数字静态照相机、平板终端、手表、智能手表、喷墨打印机、膝上型个人计算机、电视机、智能眼镜、hmd(头戴式显示器)等的可穿戴终端、摄像机、磁带录像机、车载导航装置、行车记录仪、寻呼机、电子记事本、电子词典、电子翻译机、台式电子计算器、电子游戏设备、玩具、文字处理器、工作站、视频电话、防盗用视频监视器、电子双筒望远镜、pos终端、医疗设备、鱼群探测器、各种测量设备、移动终端基站用设备、车辆、铁路车辆、航空器、直升机、船舶等的各种测量仪器类、飞行模拟器、网络服务器等。无论在哪种情况下,这些电子设备均具备上述的惯性传感器1、1a、1b、1c,因而都反映了上述实施方式中已说明的效果,从而性能优异。
97.6.第六实施方式
98.接着,作为第六实施方式涉及的具备惯性传感器1、1a、1b、1c的移动体的一例,列举汽车1500,并参照图14进行说明。此外,在以下的说明中,例示应用惯性传感器1的构成进行说明。
99.如图14所示,作为移动体的汽车1500内置有惯性传感器1,例如,能够通过惯性传感器1检测车体1501的移动或姿态。惯性传感器1的检测信号被供给至控制车身1501的移动和姿态的车身姿态控制装置1502,车身姿态控制装置1502能够根据该信号检测车身1501的姿态,并根据检测结果控制悬架的软硬、或者控制各个车轮1503的制动器。
100.此外,除此之外,惯性传感器1、1a、1b、1c还可以广泛地应用于无钥匙进入系统、发动机防盗锁止系统、车载导航系统、车载空调、防抱死制动系统(abs)、气囊、胎压监测系统
(tpms:tire pressure monitoring system)、发动机控制系统(发动机系统)、自动驾驶用惯性导航的控制设备、混合动力汽车或电动汽车的电池监视器等的电子控制单元(ecu:electronic control unit)等中。
101.另外,除了上述示例之外,惯性传感器1、1a、1b、1c例如也能够用于双足步行机器人或电车等的移动或姿态控制、遥控飞行器、遥控直升机、以及无人机等的远程操纵或者自主式的飞行器的移动或姿态控制、农业机械、或者建筑机械等的移动或姿态控制、火箭、人造卫星、船舶以及agv(无人搬运车)等的控制中。不论在哪种情况下,都能够提供反映了上述实施方式中说明的效果,性能优异的移动体。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

