lidar输出信号的放大
1.相关申请本专利申请要求于2019年3月6日提交的美国临时专利申请序列号62/814,844的权益,并以其整体并入本文。
技术领域
2.本发明涉及光学器件。特别地,本发明涉及lidar系统。
背景技术:
3.lidar技术正被应用于各种应用。lidar技术生成lidar输出信号,该lidar输出信号从诸如lidar芯片的源传送。远离源定位的对象反射lidar输出信号。反射的光信号充当lidar输入信号,并被源接收。lidar输入信号携带指示lidar输出信号源与反射对象之间的距离和/或径向速度的lidar数据。在一些情况下,源和/或与源相关联的电子器件可以处理lidar输入信号,以便提取lidar数据。
4.能够集成对于生成lidar输出信号和提取lidar数据所需的所有电光功能的平台是高度合期望的。例如,将这些功能集成在lidar芯片上是合期望的。然而,在诸如lidar芯片之类的平台中,激光器通常用作lidar输出信号的源。然而,这些激光器输出功率的限制限制了这些平台中lidar输出信号的功率。lidar输出信号的受限制功率也限制了携带lidar数据的光信号的可用功率。当生成多个不同的lidar输出信号(不同的波长通道)时,可用的激光源在输出功率方面特别受限制。波导和耦合损耗还可能通过降低被对象反射之后返回到lidar芯片的光信号水平,进一步限制接收路径上可用于检测的光学功率。诸如距离和测量精度之类的性能参数强烈依赖于接收的光学功率。结果,需要具有增加的lidar输出信号功率和/或接收路径上增加的功率的lidar平台,诸如lidar芯片。
技术实现要素:
5.一种lidar系统包括传送lidar输出信号的lidar芯片。lidar芯片包括一个或多个芯片波导。所述一个或多个芯片波导包括实用波导,所述实用波导被配置为携带从传出lidar信号和传入lidar信号中选择的一个或多个光信号。所述系统还包括具有放大器波导的放大器,所述放大器波导具有第一刻面和第二刻面。放大器被定位成使得第一刻面与实用波导的一刻面光学对准,但是第二刻面不与所述一个或多个lidar芯片波导中的任何一个光学对准。
6.lidar系统的另一实施例具有包括第一波导和第二波导的lidar芯片。lidar系统还具有放大器芯片,所述放大器芯片包括具有第一刻面和第二刻面的放大器波导。放大器芯片定位在lidar芯片上,使得第一刻面与第一波导的一刻面光学对准,并且第二刻面与第二波导的一刻面光学对准。放大器波导被配置为从第一波导接收光信号,并且引导光信号,使得第二波导从放大器波导接收光信号。放大器芯片被构造成使得光信号在进入放大器波导时行进的方向与光信号在离开放大器波导时行进的方向之间的角度小于180
°
。
附图说明
7.图1是lidar芯片的俯视图。
8.图2是根据图1的由绝缘体上硅晶片构成的lidar芯片的横截面。
9.图3a是lidar系统的示意图。
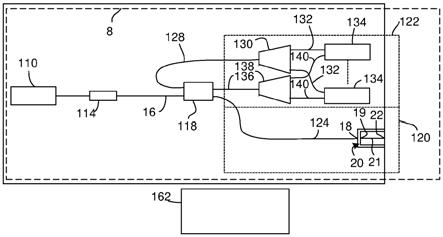
10.图3b是lidar系统的另一个实施例的示意图。
11.图4是lidar系统的另一个实施例的示意图。
12.图5是包括多个部件组装件的lidar系统的实施例的示意图。
13.图6a是包括与多个波导对准的放大器的lidar系统的实施例的示意图。
14.图6b是包括与多个波导对准的放大器的lidar系统的另一个实施例的示意图。
15.图7图示了被配置为生成包括多个通道的传入lidar信号的多个光源。
16.图8图示了包括多个激光源的光源。
17.图9图示了被配置为生成包括多个通道的光信号的结构的一个示例。
18.图10a图示了处理单元的示例。
19.图10b提供了适用于与根据图10a构造的处理单元一起使用的电子器件的示意图。
20.图11a是lidar芯片的一部分的透视图,该lidar芯片包括用于将lidar与放大器光学耦合的界面。
21.图11b是适用于与图11a中所示的lidar芯片部分一起使用的放大器芯片的透视图。
22.图11c和图11d图示了包括与图11b的放大器对接的图11a的lidar芯片的系统。图11c是该系统的俯视图。
23.图11d是通过lidar芯片上的波导和放大器芯片上的放大器波导取得的图11c中所示系统的横截面。
24.图12a是包括实用波导的lidar系统的俯视图,该实用波导具有相对于光信号在实用波导中的传播方向成非垂直角度的刻面。
25.图12b是包括放大器波导的lidar系统的俯视图,该放大器波导具有相对于光信号在放大器波导中的传播方向成非垂直角度的多个刻面。
26.图12c是包括放大器波导的lidar系统的俯视图,该放大器波导具有相对于光信号在放大器波导中的传播方向成非垂直角度的刻面和相对于传播方向成垂直角度的第二刻面。
27.图13是修改为包括两个放大器的图11b至图11d的放大器芯片的透视图。
28.图14是被修改的图11b至图11d的放大器芯片的透视图,使得光信号在进入放大器波导时行进的方向和光信号在离开放大器波导时行进的方向之间的角度小于180
°
。
29.图15是输出部件的示意图,该输出部件包括光束操纵能力,并且适合用作根据图6a构造的lidar芯片的输出部件。
30.图16图示了lidar系统,其包括定位成从lidar芯片接收lidar输出信号的透镜。
31.图17图示了lidar系统,其包括定位成从lidar芯片接收lidar输出信号的光纤。
具体实施方式
32.lidar芯片生成并传送lidar输出信号。lidar芯片包括实用波导,该实用波导携带
传出lidar信号。该系统还包括具有放大器波导的放大器,该放大器波导具有第一刻面和第二刻面。放大器定位在lidar芯片上,使得第一刻面与实用波导的一刻面光学对准,但是第二刻面不与lidar芯片上的任何波导光学对准。
33.放大器波导从实用波导接收传出lidar信号,并且在放大器波导将传出lidar信号从第一刻面携带到第二刻面时放大传出lidar信号的功率。传出lidar信号穿过第二刻面并作为lidar输出信号远离lidar芯片行进。在一些情况下,lidar输出信号也远离lidar系统行进,并充当系统输出信号。在其他情况下,系统输出信号远离lidar系统行进,并且包括来自lidar输出信号的光或由来自lidar输出信号的光组成。当远离lidar系统行进时,系统输出信号可能被对象反射。反射光信号包括lidar数据。全部或部分反射光作为lidar输入信号返回放大器波导。当放大器波导将lidar输入信号从第二刻面携带到第一刻面时,lidar输入信号可以被放大。实用波导接收放大的lidar输入信号,供lidar芯片进一步处理。在这种配置中,lidar输出信号在它们离开lidar芯片时被放大,并且lidar输出信号在它们进入lidar芯片时被放大。因此,lidar输出信号和lidar输入信号的功率增加。
34.由于放大器波导仅与一个波导而不是两个波导光学对准,因此波导界面处出现的耦合损耗降低。附加地,放大器波导与其他两个波导同时对准所导致的不准确性降低。此外,当放大器波导与两个其他波导同时对准时,在放大器波导和其他波导之间存在间隙,以便防止在将放大器放置在lidar芯片上期间损坏波导。对于更宽的间隙,波导界面的耦合损耗增加。然而,当只有一个波导界面时,放大器波导可以在组装公差允许的情况下尽量靠近芯片波导定位。结果,放大器可以增加lidar输入信号和/或lidar输出信号的功率,同时降低功率损耗。
35.图1是包括lidar组装件8的lidar芯片的俯视图,该lidar组装件8被配置为生成一个或多个lidar输出信号,并使用每个lidar输出信号来生成包括lidar数据(lidar输出信号的源与反射对象之间的距离和/或径向速度)的光信号和/或电信号。lidar组装件8包括激光腔。激光腔包括光源10,光源10可以包括用于激光器的增益介质(未示出)或由其组成。该芯片还包括从光源10接收光信号的腔波导12。光源可以定位在凹槽13中,因此光源的刻面与腔波导12的刻面光学对准,以允许光源和腔波导12交换光信号。腔波导12将光信号携带到部分返回器件14。图示的部分返回器件14是光栅,诸如布拉格光栅。然而,可以使用其他部分返回器件14;例如,镜可以与中阶梯光栅和阵列波导光栅结合使用。
36.部分返回器件14将光信号的返回部分作为返回信号返回到腔波导12。例如,腔波导12将返回信号返回到光源10,使得光信号的返回部分行进通过增益介质。光源10被配置为使得返回信号的至少一部分被添加到在腔波导12处接收的光信号。例如,光源10可以包括高度、完全或部分反射的器件15,其将从增益介质接收的返回信号反射回到增益介质中。结果,光可以在部分返回器件14与反射器件15之间共振,从而形成分布式布拉格反射器(dbr)激光腔。与dfb激光器相比,dbr激光腔具有固有的窄线宽和较长的相干长度,并且因此当反射系统输出信号的对象定位得离lidar系统更远时改进性能。
37.部分返回器件14将从腔波导12接收的光信号的一部分传递到芯片上包括的实用波导16。实用波导16从部分返回器件14接收的光信号的一部分充当激光腔的输出。激光腔的输出充当实用波导16上的传出lidar信号。实用波导16终止于刻面18,并将传出lidar信号携带到刻面18。
38.刻面18与光学放大器20的第一刻面19光学对准。光学放大器包括终止于第二刻面22的放大器波导21。传出lidar信号穿过实用波导16的刻面18,穿过第一刻面19,并在放大器波导21中被接收。放大器波导21将传出lidar信号携带到第二刻面22。第二刻面22可以被定位成使得行进通过第二刻面22的传出lidar信号离开芯片并充当lidar输出信号。例如,第二刻面22可以定位在lidar芯片的边缘处或其附近,因此行进通过第二刻面22的传出lidar信号离开芯片并充当lidar输出信号。
39.lidar输出信号远离lidar芯片行进。在一些情况下,lidar输出信号也远离lidar系统行进,并且因此充当系统输出信号。在其他情况下,系统输出信号远离lidar系统行进,并且包括来自lidar输出信号的光或由来自lidar输出信号的光组成。当远离lidar系统行进时,系统输出信号可能被对象反射。反射光信号包括lidar数据。全部或部分反射光信号远离对象行进。至少一部分反射光作为lidar输入信号返回到放大器20的第二刻面22。因此,反射信号的一部分可以通过第二刻面22进入放大器波导21。放大器波导21将lidar输入信号携带到第一刻面19。lidar输入信号穿过放大器波导21的第一刻面19,穿过实用波导16的刻面18,并且在实用波导16中被接收,在实用波导16中它可以充当传入lidar信号。可以操作放大器以便放大lidar输出信号和/或lidar输入信号。
40.lidar芯片包括数据分支24,在数据分支24中生成携带lidar数据的光学信号。数据分支包括光学耦合器26,其将光信号的一部分从实用波导16移动到数据分支中。例如,光学耦合器26将来自实用波导16的传出lidar信号的一部分耦合到参考波导27上作为参考信号。参考波导27将参考信号携带到光组合部件28。
41.光学耦合器26还将来自实用波导16的传入lidar信号的一部分耦合到比较波导30上作为比较信号。比较信号包括来自传入lidar信号(lidar输入信号)的至少一部分光。比较信号可以从参考光信号中排除光。比较波导30将比较信号携带到光组合部件28。
42.所图示的光学耦合器26是将实用波导16定位得足够靠近参考波导27和比较波导30的结果,使得来自实用波导16的光耦合到参考波导27和比较波导30中;然而,其他信号分接部件可以用于将来自实用波导16的光信号的一部分移动到参考波导27和比较波导30上。合适的信号分接部件的示例包括但不限于y型结、多模干涉耦合器(mmi)和集成光学环行器。
43.光组合部件28将比较信号和参考信号组合成复合信号。参考信号包括来自传出lidar信号的光。例如,参考信号可以充当传出lidar信号的样本。参考信号可以从lidar输出信号和传入lidar信号(lidar输入信号)中排除光。相比之下,比较信号光包括来自传入lidar信号(lidar输入信号)的光。例如,比较信号可以充当传入lidar信号的样本。因此,比较信号包括已经被定位在lidar系统之外的对象反射的光或者由其组成,而参考信号中的光还没有被定位在lidar系统之外的任何对象反射。当芯片和反射对象相对于彼此移动时,由于多普勒效应,比较信号和参考信号具有不同的频率。结果,在比较信号与参考信号之间出现拍动。
44.光组合部件28还将所得复合样本信号分离到第一检测器波导36和第二检测器波导38上。第一检测器波导36将复合样本信号的第一部分携带到第一光传感器40,第一光传感器40将复合样本信号的第一部分转换成第一电信号。第二检测器波导38将复合样本信号的第二部分携带到第二光传感器42,第二光传感器42将复合样本信号的第二部分转换成第
二电信号。合适的光传感器的示例包括锗光电二极管(pd)和雪崩光电二极管(apd)。
45.光组合部件28、第一光传感器40和第二光传感器42可以作为输出电数据信号的平衡光电检测器连接。例如,可以连接光组合部件28、第一光传感器40和第二光传感器42,使得信号光电流的dc分量抵消,从而改进检测灵敏度。用于连接第一光传感器40和第二光传感器42作为平衡光电检测器的合适方法包括串联连接第一光传感器40和第二光传感器42。在一个示例中,第一光传感器40和第二光传感器42均是串联连接的雪崩光电二极管。平衡光电检测对于检测小信号波动是合期望的。
46.合适的光组合部件28的示例是多模干涉(mmi)器件,诸如2x2 mmi器件。其他合适的光组合部件28包括但不限于绝热分离器和定向耦合器。在一些情况下,所图示的光组合部件28的功能由多于一个的光学部件或光学部件的组合来执行。
47.单个光传感器可以代替第一光传感器40和第二光传感器42,并且可以输出数据信号。当单个光传感器代替第一光传感器40和第二光传感器42时,光组合部件28不需要包括分光功能性。结果,所图示的光光组合部件28可以是2x1光组合部件,而不是所图示的2x1光组合部件。例如,图示的光光组合部件可以是2x1 mmi器件。在这些情况下,芯片包括单个检测器波导,其将复合样本信号携带到光传感器。
48.数据分支包括沿着比较波导30定位的数据光学衰减器44,使得数据光学衰减器44可以被操作以使比较波导30上的比较信号衰减。该芯片还包括沿着实用波导16定位的输出光学衰减器46,使得输出光学衰减器46可以被操作以便使实用波导16上的传出lidar信号衰减。用于数据光学衰减器44和/或输出光学衰减器46的合适衰减器被配置为使光信号的强度衰减。被配置为使光信号强度衰减的合适衰减器的示例包括基于载流子注入的pin二极管、电吸收调制器和马赫
‑
曾德尔(mz)调制器。
49.该芯片还包括采样定向耦合器50,其将来自比较波导30的一部分比较信号耦合到采样波导52上。比较信号的耦合部分充当采样信号。采样波导52将采样信号携带到采样光传感器54。尽管图1图示了采样定向耦合器50将一部分比较信号移动到采样波导52上,但是也可以使用其他信号分接部件将一部分比较信号从比较波导30移动到采样波导52上。合适的信号分接部件的示例包括但不限于y型结和mmi。
50.芯片包括用于控制激光腔操作的控制分支55。控制分支包括定向耦合器56,定向耦合器56将来自实用波导16的传出lidar信号的一部分移动到控制波导57上。传出lidar信号的耦合部分充当分接信号。尽管图1图示了定向耦合器56将传出lidar信号的一部分移动到控制波导57上,但是也可以使用其他信号分接部件将传出lidar信号的一部分从实用波导16移动到控制波导57上。合适的信号分接部件的示例包括但不限于y型结和mmi。
51.控制波导57将分接信号携带到干涉仪58,干涉仪58分离分接信号,并且然后用分接信号部分之间的相位差重新组合分接信号的不同部分。图示的干涉仪58是马赫
‑
曾德尔干涉仪;然而,可以使用其他干涉仪。
52.干涉仪58在干涉仪波导60上输出控制光信号。干涉仪波导60将控制光信号携带到控制光传感器61,控制光传感器61将控制光信号转换成充当电控制信号的电信号。干涉仪信号具有的强度是传出lidar信号的频率和/或频率改变的函数。例如,马赫
‑
曾德尔干涉仪将输出具有条纹图案的正弦控制光信号。传出lidar信号频率的改变将引起控制光信号频率的改变。因此,从控制光传感器61输出的电控制信号的频率是传出lidar信号的频率的函
数。可以使用其他检测机构来替换控制光传感器61。例如,控制光传感器61可以用布置为光组合部件28、第一光传感器40和第二光传感器42的平衡光电检测器代替。
53.电子器件62可以操作芯片上的一个或多个部件。例如,电子器件62可以与光源10、放大器20m、数据光学衰减器44、输出光学衰减器46、第一光传感器40、第二光传感器42、采样光传感器54和控制光传感器61电通信并控制它们的操作。尽管电子器件62被示出在芯片之外,但是电子器件的全部或一部分可以被包括在芯片上。例如,芯片可以包括将第一光传感器40与第二光传感器42串联连接的电导体。
54.在芯片操作期间,电子器件62操作光源10,使得激光腔输出传出lidar信号。电子器件62然后通过一系列循环来操作芯片,其中每次循环为视场中的样本区域生成lidar数据。在每次循环期间,数据信号被采样多次。在每次采样期间,电子器件调节传出lidar信号的频率。如下面将更详细描述的,电子器件可以采用来自控制分支的输出,以便控制传出lidar信号的频率,使得传出lidar信号的频率作为时间的函数对于电子器件是已知的。在一些情况下,循环至少包括第一采样和第二采样。在第一采样期间,电子器件62可以增加传出lidar信号的频率,并且在第二采样期间,电子器件62可以减小传出lidar信号的频率。例如,激光腔可以被配置为输出具有为1550 nm的波长的传出lidar信号(以及相应的lidar输出信号)。在第一采样期间,电子器件62可以增加传出lidar信号(以及相应的lidar输出信号)的频率,使得波长从1550 nm减小到1459.98 nm,随后减小传出lidar信号的频率,使得波长从1459.98 nm增大到1550 nm。
55.当在第一采样期间传出lidar信号频率增加时,lidar输出信号远离芯片行进,并且然后作为lidar输入信号返回到芯片。lidar输入信号的一部分成为比较信号。在lidar输出信号和lidar输入信号正在芯片与反射对象之间行进的时间期间,传出lidar信号的频率继续增加。由于传出lidar信号的一部分成为参考信号,因此参考信号的频率继续增加。结果,比较信号以比同时进入光组合部件的参考信号更低的频率进入光组合部件。附加地,反射对象定位得离芯片越远,在lidar输入信号返回到芯片之前,参考信号的频率增加得越多。因此,比较信号的频率与参考信号的频率之间的差越大,反射对象离芯片就越远。结果,比较信号的频率与参考信号的频率之间的差是芯片与反射对象之间距离的函数。
56.出于相同的原因,当在第二采样期间传出lidar信号频率减小时,比较信号以比同时进入光组合部件的参考信号更高的频率进入光组合部件,并且在第二采样期间比较信号的频率与参考信号的频率之间的差也是lidar系统与反射对象之间的距离的函数。
57.在一些情况下,比较信号的频率与参考信号的频率之间的差也可以是多普勒效应的函数,这是因为lidar系统和反射对象的相对移动也可以影响比较信号的频率。例如,当芯片正在朝向或远离反射对象移动和/或反射对象正在朝向或远离芯片移动时,多普勒效应可能影响比较信号的频率。因为比较信号的频率是反射对象正在朝向或远离芯片移动的速度和/或芯片正在朝向或远离反射对象移动的速度的函数,所以比较信号的频率与参考信号的频率之间的差也是反射对象正在朝向或远离芯片移动的速度和/或芯片正在朝向或远离反射对象移动的速度的函数。因此,比较信号的频率与参考信号的频率之间的差是芯片与反射对象之间距离的函数,并且也是多普勒效应的函数。
58.复合样本信号和数据信号各自有效地将比较信号和参考信号进行比较。例如,由于光组合部件组合了比较信号和参考信号,并且这些信号具有不同的频率,所以在比较信
号和参考信号之间存在拍动。因此,复合样本信号和数据信号具有与比较信号和参考信号之间的频率差相关的拍频,并且拍频可以用于确定比较信号和参考信号的频率差。复合样本信号和/或数据信号的较高拍频指示比较信号和参考信号的频率之间的较高差异。结果,数据信号的拍频是芯片与反射对象之间距离的函数,并且也是多普勒效应的函数。
59.如上面所指出的,拍频是两个未知数的函数;芯片与反射对象之间距离以及芯片与反射对象的相对速度(即多普勒效应的贡献)。比较信号与参考信号之间的频率差的改变()由给出,其中f是lidar输出信号的频率,并且因此是参考信号,是芯片和反射对象的相对速度,并且c是光在空气中的速度。多个不同样本的使用准许电子器件62求解两个未知数。例如,为第一样本确定的拍频与未知距离和多普勒贡献相关,并且为第二样本确定的拍频也与未知距离和多普勒贡献相关。这两种关系的可用性允许电子器件62求解这两个未知数。因此,可以确定芯片与反射对象之间距离,而不受多普勒效应的影响。此外,在一些情况下,电子器件62结合多普勒效应使用该距离来确定反射对象朝向或远离芯片的速度。
60.在目标和源的相对速度为零或非常小的情况下,多普勒效应对拍频的贡献基本为零。在这些情况下,多普勒效应对拍频没有做出实质性的贡献,并且电子器件62可以仅取第一样本来确定芯片与反射对象之间距离。
61.在操作期间,电子器件62可以响应于从控制光传感器61输出的电控制信号而调整传出lidar信号的频率。如上面所指出的,从控制光传感器61输出的电控制信号的幅度是传出lidar信号的频率的函数。因此,电子器件62可以响应于控制的幅度来调整传出lidar信号的频率。例如,当在采样之一期间改变传出lidar信号的频率时,电子器件62可以具有作为时间的函数的电控制信号幅度的合适值范围。在采样期间的多个不同时间处,电子器件62可以将电控制信号幅度与样本中与当前时间相关联的值范围进行比较。如果电控制信号幅度指示传出lidar信号的频率在电控制信号幅度的相关联范围之外,则电子器件62可以操作光源10以便改变传出lidar信号的频率,因此使其落入相关联范围内。如果电控制信号幅度指示传出lidar信号的频率在电控制信号幅度的相关联范围内,则电子器件62不改变传出lidar信号的频率。
62.在操作期间,电子器件62可以响应于来自采样光传感器54的采样信号来调整由输出光学衰减器46提供的衰减水平。例如,电子器件62操作输出光学衰减器46,以便响应于采样信号的幅度高于第一信号阈值而增加衰减水平,和/或响应于采样信号的幅度低于第二信号阈值而减小功率下降的幅度。
63.在一些情况下,电子器件62调整由输出光学衰减器46提供的衰减水平,以防止或降低背反射对激光腔性能的影响。例如,可以可选地选择第一信号阈值和/或第二信号阈值,以防止或降低背反射对激光腔性能的影响。当lidar输入信号的一部分作为返回的lidar信号返回到激光腔时,发生背反射。在一些情况下,穿过刻面18的大约50%的lidar输入信号返回到激光腔。当进入部分返回器件14的返回lidar信号的功率不减小至比从部分返回器件14离开的传出lidar信号的功率低(“功率下降”)多于最小功率下降阈值时,返回lidar信号可能影响激光腔的性能。在图示的芯片中,最小功率下降阈值可以在35db(0.03%)左右。因此,当进入部分返回器件14的返回lidar信号的功率比从部分返回器件14离开的传出lidar信号的功率低不多于35db时,返回lidar信号可能影响激光腔的性能。
64.电子器件62可以操作输出光学衰减器46,以便降低低功率下降的影响,例如当目标对象非常接近或高度反射或两者皆有时。如从图1中显而易见的,输出光学衰减器46为了增加衰减水平的操作降低了进入部分返回器件14的返回lidar信号的功率,并且还降低了在远离部分返回器件14的位置处的返回传出lidar信号的功率。由于输出光学衰减器46远离部分返回器件14定位,因此从部分返回器件14离开的传出lidar信号的功率不直接受到输出光学衰减器46的操作的影响。因此,输出光学衰减器46为了增加衰减水平的操作增加了功率下降的水平。结果,电子器件可以采用光学衰减器46以便调节功率下降。
65.附加地,采样信号的幅度与功率下降相关。例如,如从图1中显而易见的,采样信号的幅度与比较信号的功率相关。因为比较信号是lidar输入信号的一部分,所以采样信号的幅度与lidar输入信号的功率相关。该结果意味着采样信号的幅度也与返回的lidar信号的功率相关,因为返回的lidar信号是lidar输入信号的一部分。因此,采样信号的幅度与功率下降相关。
66.由于采样信号的幅度与功率下降相关,因此电子器件62可以使用采样信号的幅度来操作输出光学衰减器,以便将比较信号功率的幅度保持在目标范围内。例如,电子器件62可以操作输出光学衰减器46,以便响应于指示功率下降幅度等于或低于第一阈值的采样信号来增加功率下降幅度,和/或电子器件62可以操作输出光学衰减器46,以便响应于指示功率下降幅度等于或高于第二阈值的采样信号来减小功率下降幅度。在一些情况下,第一阈值大于或等于最小功率下降阈值。在一个示例中,电子器件62操作输出光学衰减器46,以便响应于采样信号的幅度高于第一信号阈值而增加功率下降的幅度,和/或响应于采样信号的幅度低于第二信号阈值而减小功率下降的幅度。从由第一阈值、第二阈值、第一信号阈值和第二信号阈值组成的组中选择的一个、两个、三个或四个变量的(一个或多个)值的标识可以根据在lidar芯片系统的设置期间光学芯片的校准来确定。
67.当复合光信号的功率超过功率阈值时,光传感器可能变得饱和。当光传感器变得饱和时,数据信号的幅度达到最大值,尽管复合光信号的功率在功率阈值以上附加增加,但该最大值没有增加。因此,当复合光信号的功率超过功率阈值时,数据可能丢失。在操作期间,电子器件62可以调整由数据光学衰减器44提供的衰减水平,因此复合光信号的功率维持在功率阈值以下。
68.如从图1中显而易见的,采样信号的幅度与比较信号的功率相关。因此,电子器件62可以响应于来自采样信号的输出来操作数据光学衰减器44。例如,当采样信号的幅度指示比较信号的功率高于上比较信号阈值时,电子器件62可以操作数据光学衰减器以便增加比较信号的衰减,和/或当采样信号的幅度指示比较信号的功率低于下比较信号阈值时,电子器件62可以操作数据光学衰减器以便减小比较信号的衰减。例如,在一些情况下,当采样信号的幅度处于或高于上比较阈值时,电子器件62可以增加比较信号的衰减,和/或当采样信号的幅度处于或低于上比较信号阈值时,电子器件62减小比较信号的衰减。
69.如上面所指出的,电子器件62可以响应于采样信号来调整由输出光学衰减器46提供的衰减水平。除了响应于采样信号调整输出光学衰减器46提供的衰减水平之外或者作为其替代方案,电子器件62可以响应于采样信号调整数据光学衰减器44提供的衰减水平。
70.芯片的合适平台包括但不限于二氧化硅、磷化铟和绝缘体上硅晶片。图2是由绝缘体上硅晶片构成的芯片的部分横截面。绝缘体上硅(soi)晶片包括定位在基底81上的透光
介质80,基底81包括衬底84上的掩埋层82。掩埋层82在透光介质80和衬底84之间。在绝缘体上硅晶片中,掩埋层是二氧化硅,而衬底和透光介质是硅。诸如soi晶片的光学平台的衬底可以充当整个芯片的衬底。例如,图1中所示的光学部件可以定位在衬底的顶部和/或横向侧上或上方。
71.图2中所图示的芯片部分包括波导构造,该波导构造适用于与由绝缘体上硅晶片构成的芯片一起使用。透光介质的脊形86远离透光介质的平板区域88延伸。光信号被约束在脊形的顶部和掩埋氧化物层之间。
72.在图2中标记了脊形波导的尺寸。例如,脊形具有标记为w的宽度和标记为h的高度。平板区域的厚度标记为t。对于lidar应用,这些尺寸比其他应用更重要,因为需要使用比其他应用中使用的更高水平的光学功率。脊形宽度(标记为w)大于1 且小于4 ,脊形高度(标记为h)大于1 且小于4 ,平板区域厚度大于0.5 且小于3 。这些尺寸可以适用于波导的直的或基本直的部分、波导的弯曲部分和(一个或多个)波导的锥形部分。因此,波导的这些部分将是单模的。然而,在一些情况下,这些尺寸适用于波导的直的或基本直的部分,而波导的弯曲部分和/或波导的锥形部分具有这些范围之外的尺寸。例如,图1中所图示的实用波导16的锥形部分可以具有>4 的宽度和/或高度,并且可以在4 到12 的范围内。附加地或替代地,波导的弯曲部分可以具有减小的平板厚度,以便减小波导的弯曲部分中的光学损耗。例如,波导的弯曲部分可以具有远离平板区域延伸的脊形,该平板区域具有大于或等于0.0 且小于0.5 的厚度。虽然上面的尺寸一般将为波导的直的或基本直的部分提供单模构造,但是它们可能导致多模的(一个或多个)锥形区段和/或(一个或多个)弯曲区段。在多模几何结构与单模几何结构之间的耦合可以使用基本上不激发高阶模的锥形来完成。因此,波导可以被构造成使得波导中携带的信号即使当在具有多模尺寸的波导区段中被携带时也以单模携带。图2的波导构造适用于从由腔波导12、实用波导16、参考波导27、比较波导30、第一检测器波导36、第二检测器波导38、采样波导52、控制波导57和干涉仪波导60组成的组中选择的所有或部分波导。在图2的上下文中公开的波导构造也适合于操纵将在下面公开的波导。
73.与实用波导16对接的光源10可以是增益元件,该增益元件是与芯片分离并且然后附接到芯片的部件。例如,光源10可以是使用倒装芯片布置附接到芯片的增益元件。
74.当光源10将与由绝缘体上硅晶片构成的芯片上的脊形波导对接时,倒装芯片布置的使用是合适的。在2017年7月11日发布的美国专利第9,705,278号和1999年11月23日发布的美国专利第5,991,484号中可以找到倒装芯片增益元件与由绝缘体上硅晶片构成的芯片上的脊形波导之间的合适界面的示例;所述专利中的每一个以其整体并入本文。构造适合于用作光源10。当光源10是增益元件时,电子器件62可以通过改变通过增益元件施加的电流水平来改变传出lidar信号的频率。
75.衰减器可以是与芯片分离并且然后附接到芯片的部件。例如,衰减器可以被包括在衰减器芯片上,该衰减器芯片以倒装芯片布置附接到芯片。衰减器芯片的使用适用于从由数据衰减器和控制衰减器组成的组中选择的所有或部分衰减器。
76.作为在分离的部件上包括衰减器的替代方案,所有或部分衰减器可以与芯片集成。例如,在1999年6月1日发布的美国专利第5,908,305号中可以找到与由绝缘体上硅晶片构成的芯片上的脊形波导对接的衰减器的示例;所述专利中的每一个以其整体并入本文。
与芯片集成的衰减器的使用适用于从由数据衰减器和控制衰减器组成的组中选择的所有或部分光传感器。
77.与芯片上的波导对接的光传感器可以是与芯片分离并且然后附接到芯片的部件。例如,光传感器可以是光电二极管或雪崩光电二极管。合适的光传感器部件的示例包括但不限于由位于日本滨松市的滨松制造的ingaas pin光电二极管,或者由位于日本滨松市的滨松制造的ingaas apd(雪崩光电二极管)。这些光传感器可以中心定位在芯片上,如图1中所图示的。替代地,终止于光传感器的所有或部分波导可以终止于定位在芯片边缘处的刻面18,并且光传感器可以在刻面18之上附接到芯片的边缘,使得光传感器接收穿过刻面18的光。作为与芯片分离的部件的光传感器的使用适用于从由第一光传感器40、第二光传感器42、采样光传感器54和控制光传感器61组成的组中选择的所有或部分光传感器。
78.作为充当分离部件的光传感器的替代方案,所有或部分光传感器可以与芯片集成。例如,与由绝缘体上硅晶片构成的芯片上的脊形波导对接的光传感器的示例可以在以下各项中找到:optics express vol. 15, no. 21, 13965
‑
13971 (2007);于2012年1月10日发布的美国专利第8,093,080号;2012年8月14日发布的美国专利第8,242,432号;以及于2000年8月22日发布的美国专利第6,108,8472号,其中每一项以其整体并入本文。与芯片集成的光传感器的使用适用于从由第一光传感器40、第二光传感器42、采样光传感器54和控制光传感器61组成的组中选择的所有或部分光传感器。
79.与各种光学器件平台集成的光栅构造是可用的。例如,通过在脊形的顶部中和/或脊形的后侧中形成槽,可以在脊形波导中形成布拉格光栅。
80.lidar芯片可以修改为生成一个lidar输出信号或多个不同的lidar输出信号。例如,图3a是图1的lidar芯片的示意图,其被修改以生成一个或多个不同的lidar输出信号。lidar芯片包括具有光源110的部件组装件8,光源110输出传出lidar信号,传出lidar信号包括一个或多个不同的通道,每个通道处于不同的波长。通道的波长可以周期性地间隔开,使得从一个通道到下一个通道的波长增加是恒定的或基本恒定的。在图1至图2的上下文中公开了用于生成单通道的合适光源110。用于生成具有周期性间隔波长的多个通道的合适光源110包括但不限于梳状激光器;多路复用到单个光学波导中的多个单波长激光器;诸如在2017年11月30日提交的授权专利号7542641、名称为“multi
‑
channel optical device”并且以其整体并入本文的美国专利申请序列号11/998,846中描述的源。
81.实用波导16从光源110接收传出lidar信号。调制器114可选地沿着实用波导16定位。调制器114被配置为调制传出lidar信号的功率,并相应地调制(一个或多个)所得lidar输出信号。电子器件62可以操作调制器114。结果,电子器件62可以调制传出lidar信号的功率,并相应地调制(一个或多个)lidar输出信号。合适的调制器114包括但不限于pin二极管载流子注入器件、马赫
‑
曾德尔调制器器件和电吸收调制器器件。当调制器114构造在绝缘体上硅平台上时,在1993年9月21日提交的、名称为integrated silicon pin diode electro
‑
optic waveguide并且以其整体并入本文的美国专利申请序列号617,810中公开了一种合适的调制器。
82.实用波导16将来自调制器114的传出lidar信号携带到信号导向部件118。信号导向部件118可以将传出lidar信号导向lidar分支120和/或数据分支122。lidar分支输出lidar输出信号并接收lidar输入信号。数据分支处理lidar输入信号以用于生成lidar数据
(lidar输出信号源与反射对象之间的距离和/或径向速度)。
83.lidar分支包括lidar信号波导124,其从信号导向部件118接收传出lidar信号的至少一部分。lidar信号波导124将传出lidar信号的至少一部分携带到刻面18。刻面18与光学放大器20的第一刻面19光学对准。光学放大器包括终止于第二刻面22的放大器波导21。传出lidar信号穿过实用波导16的刻面18,穿过第一刻面19,并在放大器波导21中被接收。放大器波导21将传出lidar信号携带到第二刻面22。第二刻面22可以被定位成使得行进通过第二刻面22的传出lidar信号离开芯片并充当lidar输出信号。例如,第二刻面22可以定位在lidar芯片的边缘处或附近,因此行进通过第二刻面22的传出lidar信号离开芯片。当传出lidar信号包括处于不同波长的多个不同通道时,传出lidar信号可以被分离成多个lidar输出信号,每个lidar输出信号处于不同的波长(通道),并且被导向视场中的不同样本区域。传出lidar信号可以通过波长色散器件(诸如光学相控阵(opa))分离成多个lidar输出信号。在一些情况下,lidar输出信号远离lidar系统行进,并充当系统输出信号。在一些情况下,lidar系统输出信号,所述信号远离lidar系统行进并且包括来自lidar输出信号的光或由其组成,并充当系统输出信号。系统输出信号可以被定位在lidar系统之外的反射对象(未示出)反射。全部或部分反射光作为传入lidar信号返回到放大器20。
84.lidar信号波导124将传入lidar信号携带到信号导向部件118。信号导向部件118将传入lidar信号导向实用波导16和/或比较信号波导128。被导向比较信号波导128的传入lidar信号部分充当比较传入lidar信号。
85.比较信号波导128将比较传入lidar信号携带到比较解复用器130。当比较光信号包括多个通道时,比较解复用器130将比较传入lidar信号划分成不同的比较信号,每个比较信号具有不同的波长。比较解复用器130在不同的比较波导132上输出比较信号。比较波导132各自将一个比较信号携带到不同的处理部件134。
86.信号导向部件118被配置为使得当信号导向部件118将至少一部分传入lidar信号导向比较波导132时,信号导向部件118还将传出lidar信号的至少一部分导向参考信号波导136。由参考信号波导136接收的传出lidar信号的部分充当参考光信号。
87.参考信号波导136将参考光信号携带到参考解复用器138。当参考光信号包括多个通道时,参考解复用器138将参考光信号划分成不同的参考信号,每个参考信号具有不同的波长。参考解复用器138在不同的参考波导140上输出参考信号。参考波导140各自将一个参考信号携带到不同的一个处理部件134。
88.比较波导132和参考波导140被配置为使得比较信号和对应的参考信号在相同的处理部件134处被接收。例如,比较波导132和参考波导140被配置为使得相同波长的比较信号和对应的参考信号在相同的处理部件134处被接收。
89.如下面将更详细描述的,处理部件134各自将比较信号与对应的参考信号组合,以形成携带视场上样本区域的lidar数据的复合信号。因此,可以处理复合信号,以便提取样本区域的lidar数据。
90.信号导向部件118可以是光学耦合器。当信号导向部件118是光学耦合器时,信号导向部件118将传出lidar信号的第一部分导向lidar信号波导124,并且将传出lidar信号的第二部分导向参考信号波导136,并且还将传入lidar信号的第一部分导向实用波导16,并且将传入lidar信号的第二部分导向比较信号波导128。因此,传入lidar信号的第二部分
可以充当比较传入lidar信号,并且传出lidar信号的第二部分可以充当参考光信号。
91.信号导向部件118可以是光学开关,诸如交叉开关。合适的交叉开关可以在交叉模式或通过模式下操作。在通过模式下,传出lidar信号被导向lidar信号波导124,并且传入lidar信号将被导向实用波导16。在交叉模式下,传出lidar信号被导向参考信号波导136,并且传入lidar信号被导向比较信号波导128。因此,传入lidar信号或传入lidar信号的一部分可以充当比较光信号,并且传出lidar信号或传出lidar信号的一部分可以充当参考光信号。
92.诸如交叉开关的光学开关可以由电子器件控制。例如,电子器件可以控制操作开关,使得开关在交叉模式或通过模式下。当lidar输出信号将从lidar系统传送时,电子器件操作开关,使得开关在通过模式下。当lidar系统将接收lidar输入信号时,电子器件操作开关,使得开关在交叉模式下。相比于与光学耦合器作为信号导向部件118的使用相关联,开关的使用可以提供更低的光学损耗水平。
93.在信号导向部件118的操作的上面描述中,比较光信号和参考光信号同时被导向数据分支。结果,处理部件34可以各自将比较信号与对应的参考信号组合。
94.来自激光源的光通常是线性偏振的,并且因此lidar输出信号也通常是线性偏振的。来自目标的反射可以改变返回光的偏振角。因此,lidar输入信号可以包括不同线性极性的光。例如,lidar输入信号的第一部分可以包括第一线性偏振的光,并且lidar输入信号的第二部分可以包括第二线性偏振的光。所得复合信号的强度与比较信号和参考信号偏振之间的角度余弦的平方成比例。如果角度为90度,lidar数据可能在所得复合信号中丢失。结果,可以修改lidar系统,以补偿lidar输出信号的偏振改变。
95.图3b图示了图3a的lidar系统,其被修改为包括光学环行器作为信号导向部件118。光学环行器被配置为使得传出lidar信号被导向lidar信号波导124,并且传入lidar信号被导向比较信号波导128。比较信号波导128将比较传入lidar信号携带到比较解复用器130。附加地,分接部件144沿着实用波导16定位。分接部件144被配置为分接传出lidar信号的第一部分,使得传出lidar信号的第一部分在参考信号波导136上被接收。由参考信号波导136接收的传出lidar信号的第一部分充当参考光信号。参考信号波导136将参考光信号携带到参考解复用器138。相应地,电子器件可以操作如图3a上下文中公开的图3b的lidar系统。合适的光学环行器包括但不限于基于法拉第旋转器的光纤环行器和集成光学环行器。尽管图3b的信号导向部件118被公开为光学环行器,但是图3b的信号导向部件118可以是光学耦合器或光学开关。
96.图4是图3a和/或图3b的lidar系统的示意图,其被修改以补偿lidar输出信号的偏振改变。分接部件144沿着实用波导16定位。分接部件144被配置为分接传出lidar信号的第一部分,使得传出lidar信号的第一部分在第一参考信号波导146上被接收。由第一参考信号波导146接收的传出lidar信号的第一部分充当第一参考光信号。分接部件144还被配置为分接传出lidar信号的第二部分,使得传出lidar信号的第二部分在第二参考信号波导148上被接收。由第二参考信号波导148接收的传出lidar信号的第二部分充当第二参考光信号。
97.第一参考信号波导146将第一参考光信号携带到第一参考解复用器150。当第一参考光信号包括多个通道时,第一参考解复用器150将第一参考光信号划分成不同的第一参
考信号,每个第一参考信号具有不同的波长。第一参考解复用器150在不同的第一参考波导152上输出第一参考信号。第一参考波导152各自携带第一参考信号中的一个到若干个第一处理部件154中的一个。
98.第二参考信号波导148将第二参考光信号携带到第二参考解复用器156。当第二参考光信号包括多个通道时,第二参考解复用器156将第二参考光信号划分成不同的第二参考信号,每个第二参考信号具有不同的波长。第二参考解复用器156在不同的第二参考波导158上输出第二参考信号。第二参考波导158各自携带第二参考信号中的一个到若干个第二处理部件160中的一个。
99.实用波导16将传出lidar信号携带到信号导向部件118。信号导向部件118将传出lidar信号导向lidar信号波导124。lidar信号波导124从放大器20接收传入lidar信号,并将传入lidar信号携带到信号导向部件118。信号导向部件118将传入lidar信号导向中间波导162。合适的信号导向部件118包括但不限于环行器、2x2光学耦合器、1x2光学耦合器和开关。
100.中间波导162将传入lidar信号的接收部分携带到分束器164。分束器164将光束分成前驱比较传入信号和第二比较传入信号。前驱比较传入信号在前驱比较信号波导165上被接收,并且第二比较传入信号在第二比较信号波导166上被接收。前驱比较信号波导165将前驱比较传入信号携带到偏振旋转器167。偏振旋转器输出在第一比较信号波导169上接收的第一比较传入信号。第一比较信号波导169将第一比较传入信号携带到第一比较解复用器168,并且第二比较信号波导166将第二比较传入信号携带到第二比较解复用器170。
101.当第一比较传入lidar信号包括多个通道时,第一比较解复用器168将第一比较传入lidar信号划分成不同的第一比较信号,每个第一比较信号具有不同的波长。第一比较解复用器168在不同的第一比较波导172上输出第一比较信号。第一比较波导172各自将第一比较信号之一携带到不同的第一处理部件154。
102.当第二比较光信号包括多个通道时,第二比较解复用器170将第一比较传入lidar信号划分成不同的第二比较信号,每个第二比较信号具有不同的波长。第二比较解复用器170在不同的第二比较波导174上输出第二比较信号。第二比较波导174各自将第二比较信号之一携带到不同的第二处理部件160。
103.第一比较波导172和第一参考波导152被配置为使得在相同的第一处理部件154处接收比较信号和对应的参考信号。例如,第一比较波导172和第一参考波导152被配置为使得相同波长的第一比较信号和第一参考信号在相同的第一处理部件154处被接收。
104.第二比较波导174和第二参考波导158被配置为使得在相同的第二处理部件160处接收比较信号和对应的参考信号。例如,第二比较波导174和第二参考波导158被配置为使得相同波长的第二比较信号和第二参考信号在相同的第二处理部件160处被接收。
105.第一处理部件154各自将第一比较信号与对应的第一参考信号组合,以形成携带视场上样本区域的lidar数据的第一复合信号。第二处理部件160各自将第二比较信号与对应的第二参考信号组合,以形成携带视场上样本区域的lidar数据的第二复合信号。
106.lidar系统被构造成使得第一比较信号具有与对应的第二比较信号相同的偏振角。例如,分束器164可以是偏振分束器。偏振分束器的一个示例被构造成使得前驱比较传入信号中的通道具有第一偏振,但不具有或基本上不具有第二偏振,并且第二比较传入信
号中的通道具有第二偏振,但不具有或基本上不具有第一偏振。例如,偏振分束器可以将具有第一偏振的传入lidar信号的一部分路由到前驱比较信号波导165,并且将具有第二偏振的传入lidar信号的一部分路由到第二比较信号波导166。第一偏振和第二偏振可以是线性极性,并且第二偏振不同于第一偏振。例如,第一偏振可以是te,并且第二偏振可以是tm,或者第一偏振可以是tm,并且第二偏振可以是te。合适的分束器包括但不限于渥拉斯顿棱镜、基于mems的偏振分束器和使用不对称y分支的集成光学偏振分束器、马赫
‑
曾德尔干涉仪和多模干涉耦合器。
107.偏振旋转器可以被配置为将前驱比较传入信号中的通道的偏振从第一偏振改变为第二偏振。结果,第一比较传入信号中的通道具有第二偏振,但不具有或基本上不具有第一偏振。因此,第一比较传入信号中的通道和第二比较传入信号中的对应通道各自具有相同的偏振(在本讨论中为第二偏振)。由第一比较传入信号所导致的第一比较信号具有与由第二比较传入信号所导致的对应第二比较信号相同的偏振角。合适的偏振旋转器包括但不限于保偏光纤的旋转、法拉第旋转器、半波片、基于mems的偏振旋转器和使用不对称y分支的集成光学偏振旋转器、马赫
‑
曾德尔干涉仪和多模干涉耦合器。
108.因为(一个或多个)lidar输出信号是线性偏振的,所以第一参考信号可以具有与对应的第二参考信号相同的线性偏振角。例如,第一参考信号和第二参考信号可以各自具有与第一比较传入信号和第二比较传入信号相同的偏振。因此,第一比较信号、第二比较信号、第一参考信号和第二参考信号可以各自具有相同的偏振。在该示例中,第一比较信号、第二比较信号、第一参考信号和第二参考信号可以各自具有第二偏振的光。
109.作为以上配置的结果,第一复合信号各自是由组合参考信号和相同偏振的比较信号所导致的,并且将相应地在参考信号和比较信号之间提供期望的拍动。例如,第一复合信号各自是由组合参考信号和第一偏振的比较信号所导致的,并且排除或基本排除第二偏振的光,或者第一复合信号各自是由组合参考信号和第二偏振的比较信号所导致的,并且排除或基本排除第一偏振的光。类似地,第二复合信号各自包括参考信号和相同偏振的比较信号,将相应地在参考信号和比较信号之间提供期望的拍动。例如,第二复合信号各自是由组合参考信号和第一偏振的比较信号所导致的,并排除或基本排除第二偏振的光,或者第一复合信号各自是由组合参考信号和第二偏振的比较信号所导致的,并排除或基本排除第一偏振的光。
110.上面配置导致视场中单个样本区域的lidar数据出现在为样本区域生成的多个不同复合信号(即第一复合信号和第二复合信号)中。在一些情况下,确定样本区域的lidar数据包括电子器件组合来自不同复合信号(即,第一复合信号和第二复合信号)的lidar数据。组合lidar数据可以包括对从多个不同的复合信号生成的lidar数据取平均值、中值或模值。例如,电子器件可以将lidar输出信号源与根据第一复合信号确定的反射对象之间的距离与根据第二复合信号确定的距离进行平均,和/或电子器件可以将lidar输出信号源和根据第一复合信号确定的反射对象之间的径向速度与根据第二复合信号确定的径向速度进行平均。
111.在一些情况下,确定样本区域的lidar数据包括电子器件将一个或多个复合信号(即第一复合信号和/或第二复合信号)标识为最能表示现实的lidar数据(代表性lidar数据)的源。然后,电子器件可以使用来自所标识的复合信号的lidar数据作为用于附加处理
的代表性lidar数据。例如,电子器件可以将具有较大振幅的信号(第一复合信号或第二复合信号)标识为具有代表性的lidar数据,并且可以使用来自所标识信号的lidar数据,以供lidar系统进一步处理。在一些情况下,电子器件将标识具有代表性lidar数据的复合信号与组合来自不同lidar信号的lidar数据相结合。例如,电子器件可以将具有高于振幅阈值的振幅的每个复合信号标识为具有代表性lidar数据,并且当多于两个复合信号被标识为具有代表性lidar数据时,电子器件可以组合来自每个所标识复合信号的lidar数据。当一个复合信号被标识为具有代表性lidar数据时,电子器件可以使用来自该复合信号的lidar数据作为代表性lidar数据。当没有复合信号被标识为具有代表性lidar数据时,电子器件可以丢弃与那些复合信号相关联的样本区域的lidar数据。
112.尽管图4是在部件被布置成使得第一比较信号、第二比较信号、第一参考信号和第二参考信号各自具有第二偏振的上下文中描述的,但是图4中的部件的其他配置可以被布置成使得第一复合信号是由组合参考信号和相同线性偏振的比较信号所导致的,并且第一复合信号是由组合参考信号和相同线性偏振的比较信号组合所导致的。例如,偏振旋转器可以沿着第一参考信号波导146而不是在前驱比较信号波导165与第一比较信号波导169之间定位。作为另一个示例,当第一参考信号和第二参考信号各自具有第一偏振时,偏振旋转器可以沿着第二比较信号波导166定位。
113.上面系统配置导致lidar输入信号的第一部分(具有第一偏振的部分)和lidar输入信号的第一部分(具有第二偏振的部分)被引导成不同的复合信号。例如,系统配置可以导致第一复合信号包括比第一复合信号更多的来自lidar输入信号的第一部分的功率,并且第二复合信号包括比第一复合信号更多的来自lidar输入信号的第二部分的功率。替代地,系统配置导致第一复合信号包括比第一复合信号更多的来自lidar输入信号的第二部分的功率,并且第二复合信号包括比第一复合信号更多的来自lidar输入信号的第一部分的功率。在一些情况下,lidar输入信号的第一部分具有零功率或基本零功率,或者lidar输入信号的第二部分具有零功率或基本零功率。
114.尽管图3a至图4的lidar芯片是在生成多个lidar输出信号的上下文中公开的,但是图3a至图4的lidar芯片可以被配置和/或操作以便生成或输出一个lidar输出信号。例如,光源110可以输出单个通道。
115.lidar芯片可以包括多于一个的部件组装件,每个部件组装件被配置为生成一个或多个lidar输出信号,并使用每个lidar输出信号来生成包括lidar数据(lidar系统与反射对象之间的距离和/或径向速度)的光信号和/或电信号。例如,图5图示了包括多个部件组装件的lidar芯片,每个部件组装件根据图3a来构造。
116.来自每个不同部件组装件的传出lidar信号可以各自在不同的放大器处被接收。相比之下,图5图示了在包括多个放大器20的放大器芯片174处接收的来自每个不同部件组装件的传出lidar信号。放大器芯片174上的每个放大器20接收传出lidar信号中的不同一个。
117.尽管图5图示了包括在相同lidar芯片上的多个部件组装件,但是多个部件组装件可以包括在不同的lidar芯片上,并且不同的lidar芯片可以定位在公共衬底(未示出)上。例如,根据图3a构造的多个lidar芯片可以定位在公共衬底上。
118.图1a至图5的lidar芯片包括一个或多个放大器波导,每个放大器波导与一个
lidar芯片波导光学对准,但不与任何其他lidar芯片波导光学对准。lidar芯片波导可以与lidar芯片集成。在一些情况下,lidar芯片波导以如下方式全部或部分定位在基底81之上:对于lidar芯片波导定位在基底81之上的部分的整体,垂直于基底81的线可以穿过lidar芯片波导。结果,在一些情况下,对于lidar芯片波导的全部或部分长度,lidar芯片波导相对于基底81固定。在一些情况下,lidar芯片波导是脊形波导,诸如根据图2构造的脊形波导。图1a至图5图示了定位在lidar芯片边缘处的放大器芯片,使得一个或多个放大器波导各自仅与一个lidar芯片波导光学对准。例如,放大器芯片可以定位在lidar芯片的边缘处,使得可以绘制一条线,其从放大器芯片上的刻面开始并且在刻面处的传出lidar信号的传播方向上远离放大器芯片延伸,并且不穿过lidar芯片的任何部分。
119.放大器芯片的实施例可以定位在lidar芯片上,使得第一刻面与第一波导的一刻面光学对准,并且第二刻面与第二波导的一刻面光学对准。在这种布置中,放大器波导从第一波导接收光信号,并且引导光信号,使得第二波导从放大器波导接收光信号。附加地,放大器芯片可以被构造成使得光信号在进入放大器波导时行进的方向和光信号在离开放大器波导时行进的方向之间的角度小于180
°
或者小于或等于90
°
。作为示例,图6a图示了lidar芯片的实施例,其中放大器波导21从lidar信号波导124(第一波导)接收传出光信号,并且引导光信号,使得lidar信号波导176(第二波导)的第二部分从放大器波导21接收传出光信号。附加地,光信号在进入放大器波导21时行进的方向平行于或基本平行于光信号在离开放大器波导21时行进的方向。结果,传出lidar信号在进入放大器波导时行进的方向和传出lidar信号在离开放大器波导时行进的方向之间的角度是0
°
或基本上是0
°
,并且因此小于180
°
。
120.在图6a中,lidar信号波导176的第二部分将传出lidar信号携带到输出部件178。当传出光信号包括处于不同波长的多个不同通道时,输出部件178可以将传出光信号分离成多个lidar输出信号,每个lidar输出信号处于不同的波长(通道)并且被导向视场中的不同样本区域。在一些情况下,lidar输出信号远离lidar系统行进,并且充当系统输出信号。在其他情况下,系统输出信号远离lidar系统行进,并且包括来自lidar输出信号的光或由来自lidar输出信号的光组成。当远离lidar系统行进时,系统输出信号可以被定位在lidar系统之外的一个或多个对象反射。反射光包括lidar数据。全部或部分反射光作为lidar输入信号返回到输出部件178。输出部件178组合lidar输入信号,并在lidar信号波导176的第二部分上输出结果作为传入光信号。
121.在图6a的上下文中公开的放大器芯片可以沿着其他lidar芯片波导定位。例如,图6b图示了沿着实用波导定位的图6a的放大器芯片。实用波导177的第一部分从光源110接收传出lidar信号,并将传出lidar信号携带到放大器芯片20。放大器波导21从实用波导177(第一波导)的第一部分接收传出光信号,并引导光信号,使得实用波导16(第二波导)从放大器波导21接收传出光信号。在图6b的配置中,传出lidar信号被放大,而没有放大比较信号。相比之下,图6a的配置提供了传出lidar信号和所得比较信号两者的放大。
122.在一些情况下,输出部件178还包括光束操纵功能性。在这些情况下,输出部件178可以与电子器件62电气通信。电子器件62可以操作输出部件178,以便将一个或多个lidar输出信号操纵至视场中的(一个或多个)不同样本区域。输出部件178和/或电子器件62可以被配置为使得不同的lidar输出信号被独立操纵或者被同时操纵。
123.单个放大器芯片可以包括根据图1至图5的一个或多个放大器波导,以及根据图6a和图6b构造的一个或多个放大器波导。
124.尽管上述lidar系统被图示为在每个部件组装件中具有单个光源110,但是光源110可以包括多个光源。例如,图7图示了光源110,其包括m个光子源111,每个光子源111生成n个通道。每个通道被接收在通道波导180上。通道波导将通道携带到通道多路复用器182,通道多路复用器182组合通道,以便形成在实用波导16上接收的传出lidar信号。
125.在图7中,每个通道被标记为,其中i是光子源111的数量,并且是从1到m,并且j是光子源j的通道数量,并且是从1到n。如上面所指出的,光子源111可以被配置为使得通道的波长周期性地间隔开,使得从一个通道到下一个通道的波长增加()是恒定的或者基本恒定的。在一些情况下,光子源111被配置为使得具有相邻波长的通道由不同的光子源111生成。例如,光子源111可以被配置为使得。用于该配置的合适的光子源111包括但不限于梳状激光器。在这种配置中,通道多路复用器可以是循环多路复用器,其被设计为具有等于通道多路复用器的自由光谱范围(fsr)的倍数的波长间隔()。因此,通道复用器可以被设计成在波长范围()内循环。合适的循环多路复用器包括但不限于来自gemfire的“无色”awg(8通道循环阵列波导光栅,2018)。
126.光子源111的数量的合适值(m)包括但不限于大于或等于2、4或8和/或小于16、32或64的值。由光子源111提供的通道数量的合适值(n)包括但不限于大于或等于2、4或8和/或小于16、32或64的值。从一个通道到下一个通道的波长增加的合适值()包括但不限于大于或等于0.2 nm、0.4 nm或0.6 nm和/或小于0.8 nm、1.0 nm或1.5 nm的值。具有最短波长的通道的波长的合适值包括但不限于大于或等于1.3、1.4 或1.5 和/或小于1.6 、1.7 或1.8的值。在一个示例中,lidar系统包括大于或等于2、4或8和/或小于16、32或64的m;大于或等于2、4或8,和/或小于16、32或64的n;以及大于或等于0.2 nm、0.4 nm或0.6 nm和/或小于0.8 nm、1 nm或1.5 nm的。
127.在一些情况下,光源110被配置为使得至少一部分光子源111各自生成具有相邻波长的两个或更多个通道。例如,光子源111可以被配置为使得光子源111可以被配置为使得。用于这种配置的合适的光子源111包括但不限于梳状激光器。在这种配置中,通道多路复用器可以是具有至少为的带宽的宽带多路复用器。合适的宽带多路复用器包括但不限于阵列波导光栅(awg)和薄膜滤波器。
128.如上面所指出的,光源和/或光子源中的一个或多个可以是梳状激光器。然而,光源110的其他构造是可能的。例如,图8图示了包括多个激光源184的光源110或光子源111的示例。图8中所图示的光源110或光子源111包括多个激光源184,每个激光源184输出源波导186上的一个通道。源波导186将通道携带到激光多路复用器188,激光多路复用器188组合通道,以便形成在通道波导或实用波导16上接收的光信号。电子器件可以操作激光源184,因此激光源184同时输出每个通道。与根据图8构造的光源110或光子源111一起使用的合适的激光器包括但不限于外腔激光器、分布式反馈激光器(dfb)和法布里
‑
珀罗(fp)激光器。外腔激光器由于它们一般较窄的线宽——这可以降低检测信号中的噪声——而在该实施例中是有利的。
129.图9图示了可能的光源110或光子源111构造的另一个示例。光源110或光子源111
包括增益元件190,诸如半导体激光器的增益元件。增益波导192与增益元件光学对准,以便从增益元件接收光信号。在一些情况下,增益波导排除增益元件中包含的增益介质。例如,增益波导可以是绝缘体上硅芯片上的脊形波导。多个部分返回器件194沿着增益波导定位,使得部分返回器件与光信号相互作用。
130.在操作期间,电子器件操作增益元件,使得增益介质输出光信号。部分返回器件194各自通过光信号的一部分。实用波导16从部分返回器件接收的光信号部分充当传出lidar信号。部分返回器件还将光信号的一部分返回到增益元件,使得光信号的返回部分行进通过增益元件。增益元件可以包括全反射层或部分反射层,其从增益元件接收光信号的返回部分,并将光信号的返回部分反射回增益元件,从而允许光信号的返回部分被放大和发射激光。因此,光源110或光子源111可以是外腔激光器。
131.部分返回器件可以被配置为使得每个部分返回器件返回不同波长的光。例如,部分返回器件可以被配置为使得由至少一个部分返回器件返回将由光源110输出的每一个通道的波长。结果,每个期望的通道将发射激光并出现在传出lidar信号中。合适的部分返回器件包括但不限于布拉格光栅。
132.处理部件134的全部或一部分可以如在图1a的上下文中公开的那样被构造和/或操作。然而,处理部件134可以具有其他构造和/或操作原理。作为示例,图10a至图10b图示了用于在lidar芯片和/或lidar系统中使用的合适处理部件134的示例。第一分离器202将参考波导27、140、152或158上携带的参考信号划分到第一参考波导210和第二参考波导208上。第一参考波导210将参考信号的第一部分携带到光组合部件211。第二参考波导208将参考信号的第二部分携带到第二光组合部件212。
133.第二分离器200将比较波导30、130、172或174上携带的比较信号划分到第一比较波导204和第二比较波导206上。第一比较波导204将比较信号的第一部分携带到光组合部件211。第二比较波导208将比较信号的第二部分携带到第二光组合部件212。
134.第二光组合部件212将比较信号的第二部分和参考信号的第二部分组合成第二复合信号。由于比较信号的第二部分和参考信号的第二部分之间的频率差,第二复合信号在比较信号的第二部分与参考信号的第二部分之间拍动。光组合部件212还将所得第二复合信号分离到第一辅助检测器波导214和第二辅助检测器波导216上。
135.第一辅助检测器波导214将第二复合信号的第一部分携带到第一辅助光传感器218,第一辅助光传感器218将第二复合信号的第一部分转换成第一辅助电信号。第二辅助检测器波导216将第二复合信号的第二部分携带到第二辅助光传感器220,第二辅助光传感器220将第二复合信号的第二部分转换成第二辅助电信号。合适的光传感器的示例包括锗光电二极管(pd)和雪崩光电二极管(apd)。
136.第一光组合部件211将比较信号的第一部分和参考信号的第一部分组合成第一复合信号。由于比较信号的第一部分与参考信号的第一部分之间的频率差,第一复合信号在比较信号的第一部分与参考信号的第一部分之间拍动。光组合部件211还将第一复合信号分离到第一检测器波导221和第二检测器波导222上。
137.第一检测器波导221将第一复合信号的第一部分携带到第一光传感器223,第一光传感器223将第二复合信号的第一部分转换成第一电信号。第二检测器波导222将第二复合信号的第二部分携带到第二辅助光传感器224,第二辅助光传感器224将第二复合信号的第
二部分转换成第二电信号。合适的光传感器的示例包括锗光电二极管(pd)和雪崩光电二极管(apd)。
138.第一参考波导210和第二参考波导208被构造成在参考信号的第一部分与参考信号的第二部分之间提供相移。例如,第一参考波导210和第二参考波导208可以被构造成以便在参考信号的第一部分与参考信号的第二部分之间提供90度相移。作为示例,一个参考信号部分可以是同相分量,并且另一个是正交分量。因此,参考信号部分之一可以是正弦函数,并且另一个参考信号部分可以是余弦函数。在一个示例中,第一参考波导210和第二参考波导208被构造成使得第一参考信号部分是余弦函数,并且第二参考信号部分是正弦函数。因此,第二复合信号中的参考信号部分相对于第一复合信号中的参考信号部分相移,然而,第一复合信号中的比较信号部分相对于第二复合信号中的比较信号部分没有相移。
139.第一光传感器223和第二光传感器224可以连接为平衡检测器,并且第一辅助光传感器218和第二辅助光传感器220也可以连接为平衡检测器。例如,图10b提供了电子器件、第一光传感器223、第二光传感器224、第一辅助光传感器218和第二辅助光传感器220之间关系的示意图。光电二极管的符号用于表示第一光传感器223、第二光传感器224、第一辅助光传感器218和第二辅助光传感器220,但是这些传感器中的一个或多个可以具有其他构造。在一些情况下,图10b的示意图中所图示的所有部件都包括在lidar系统中。在一些情况下,图10b的示意图中所图示的部件分布在lidar系统与定位在lidar系统之外的电子器件之间。
140.电子器件将第一光传感器223和第二光传感器224连接为第一平衡检测器225,并且将第一辅助光传感器218和第二辅助光传感器220连接为第二平衡检测器226。特别地,第一光传感器223和第二光传感器224串联连接。附加地,第一辅助光传感器218和第二辅助光传感器220串联连接。第一平衡检测器中的串行连接与第一数据线228通信,第一数据线228携带来自第一平衡检测器的输出作为第一数据信号。第二平衡检测器中的串行连接与第二数据线232通信,第二数据线232携带来自第一平衡检测器的输出作为第二数据信号。由于比较信号与参考信号之间的拍动,即第一复合信号中和第二复合信号中的拍动,第一数据信号和第二数据信号正在拍动。
141.第一数据线228将第一数据信号携带到第一开关234。第一开关可以:处于第一配置,其中第一数据信号被携带到距离分支136;或者处于第二配置,其中第一数据信号被携带到速度分支238。在图10b中,第一开关234示出为处于第一配置。第二数据线232将第二数据信号携带到第二开关240。第二开关可以:处于第一配置,其中第二数据信号被携带到距离分支236;或者处于第二配置,其中第二数据信号被携带到速度分支238。在图10b中,第二开关240示出为处于第一配置。用作第一开关和/或第二开关的合适开关包括但不限于机电开关和固态mosfet或pin二极管开关。
142.电子器件操作第一开关和第二开关,使得它们在第一时段期间和在第二时段期间处于相同的配置。例如,电子器件可以操作第一开关和第二开关,使得第一开关和第二开关在第一时段期间均处于第一配置,并且在第二时段期间均处于第二配置。在这个示例中,第一数据信号和第二数据信号在第一时段期间被携带到距离分支236,并且在第二时段期间被携带到速度分支238。
143.在lidar系统操作期间,lidar数据的生成被划分为一系列循环,其中lidar数据是
为每次循环生成的。在一些情况下,每次循环对应于视场中不同的样本区域。因此,不同的循环可以为视场中的不同样本区域生成lidar数据。
144.可以执行循环,使得每次循环的时间可以被划分成不同的时间段,其包括距离时间段(第一时段)和速度时间段(第二时段)。反射对象与lidar芯片之间的距离可以在距离时段内确定,并且反射对象与lidar芯片之间的径向速度可以在速度时段内确定。
145.电子器件被配置为使用第一数据信号和第二数据信号来确定或至少近似lidar系统和反射对象之间的距离。例如,在第一时段期间,电子器件可以操作调制器114,以便将线性调频添加到传出lidar信号、以及相应地lidar输出信号的振幅。将线性调频添加到振幅可以包括调制传出lidar信号的振幅,使得传出lidar信号的振幅是正弦曲线的函数。在一个示例中,传出lidar信号的振幅被调制,使得传出lidar信号的振幅是包括正弦曲线的函数的平方根和/或是正弦曲线的平方根。例如,可以对传出lidar信号进行调制,以便产生经调制的传出lidar信号和数学上由等式1:表示的lidar输出信号,其中m、n、c、d和f是常数,t表示时间,m>0、n>0并且,以便防止被开方数变为负,。如下面将变得显而易见的,f可以是lidar输出信号频率(f
c
)的函数。在等式1中,可以选择f和c,使得。
146.距离分支包括第一距离分支线242。在第一时段期间,第一距离分支线242将第一数据信号携带到第一乘法器244。在图10b中,第一乘法器244被配置为对第一数据信号的振幅进行平方,并输出第一相乘数据信号。距离分支包括第二距离分支线246。在第一时段期间,第二距离分支线246将第二数据信号携带到第二乘法器248。在图10b中,第二乘法器248被配置为对第二数据信号的振幅进行平方,并输出第二相乘数据信号。合适的第一乘法器和/或第二乘法器包括但不限于rf混频器,诸如吉尔伯特单元混频器。
147.距离分支包括加法器250,其将第一相乘数据信号和第二相乘数据信号相加。加法器输出相加的数据信号。合适的加法器包括但不限于rf组合器,包括电阻或混合组合器。距离分支包括低通滤波器252,其接收相加的数据信号并输出拍动数据信号。低通滤波器被选择来移除对相加的数据信号的高频贡献,这些高频贡献是参考信号和返回信号混合的假象。低通滤波器可以选择为具有大于或等于:的带宽,其中表示lidar输入信号相对于lidar系统将为其提供可靠结果的lidar输入信号的多普勒频移的最大水平,表示lidar输出信号的传送和lidar输入信号的接收之间的最大延迟,并且表示在采样时段(即第一时段)的持续时间期间,添加到经调制传出lidar信号振幅的线性调频频率的改变率。在一些情况下,根据b/t确定,其中b表示采样时段持续时间期间添加到经调制传出lidar信号振幅的线性调频频率的改变,并且t是采样时段的持续时间。在一些情况下,t根据下式确定:,其中表示传出lidar信号的波长,:表示速度分辨率,并且b可以根据下式确定:,其中c表示光速,并且表示距离分辨率。在一些情况下,滤波器具有大于0.1 ghz、0.2 ghz或0.3 ghz和/或小于0.4 ghz、0.5 ghz或1 ghz的带宽。扫描时段(t)的对应值可以是10、8、4、3、2和1。
148.距离分支包括模数转换器(adc)254,其从滤波器接收拍动数据信号。模数转换器(adc)254将拍动数据信号从模拟形式转换成数字形式,并将结果作为数字lidar数据信号输出。如上面所讨论的,拍动数据信号的转换包括以采样速率对拍动数据信号进行采样。向lidar输出信号的振幅添加线性调频显著地减少或移除了来自复合信号和所得电信号的拍动的径向速度的影响。例如,lidar输出信号相对于lidar输入信号的频移(“频移”,)可以写成,其中表示由于多普勒频移所致的频率改变,并且是由于反射对象与lidar系统之间的分离所致的频率改变。传出lidar信号可以被调制,以便产生经调制的传出lidar信号,以及相应地也被调制的lidar输出信号,其中由于多普勒频移所致的频率改变()小于将从如下正弦lidar输出信号而发生的多普勒频移的10%、5%、1%或者甚至0.1%,所述正弦lidar输出信号充当lidar并且具有恒定振幅和与经调制的传出lidar信号和/或lidar输出信号相同的频率。例如,传出lidar信号和/或lidar输出信号可以被调制,以便产生经调制的传出lidar信号和/或lidar输出信号,其中由于多普勒频移所致的频率改变()小于将从如下连续波而发生的多普勒频移的10%、5%、1%或甚至0.1%,所述连续波充当lidar输出信号并且具有与经调制的传出lidar信号和/或lidar输出信号相同的频率。在另一个示例中,传出lidar信号和/或lidar输出信号被调制,以便产生经调制的传出lidar信号和/或lidar输出信号,其中由于多普勒频移所致的频率改变()小于将从充当lidar输出信号的调制前的传出lidar信号(未调制的传出lidar信号)而发生的多普勒频移的10%、5%、1%或甚至0.1%。这些结果可以通过增加等式1变量f相对于c的值来实现。例如,f可以表示,并且c可以表示,其中标示经调制传出lidar信号振幅中频率线性调频的基频。因此,通过增加lidar输出信号频率()相对于线性调频基频()的值,可以相对于c增加f。作为示例,和可以被选择为使得。在一些情况下,选择和,使得∶的比率大于2∶1、10∶1、1x104∶1、5xl04或1xl05∶1和/或小于5xl05、lxl06、5xl06或5xl08。因此,对于f∶c的比率,变量f和c也可以具有这些相同的值。从频移中减少和/或移除由于多普勒频移所致的频率改变()降低了拍频,并相应地减小了所需的采样速率。
149.距离分支包括变换模块256,其从模数转换器(adc)254接收数字lidar数据信号。变换模块256被配置为对数字lidar数据信号执行实变换,以便从时域转换到频域。该转换为lidar输入信号相对于由反射对象和lidar系统之间的距离引起的lidar输入信号偏移的频率偏移提供了明确的解决方案。合适的实变换是傅立叶变换,诸如快速傅立叶变换(fft)。将变换分类为实变换将变换与复变换(诸如复傅立叶变换)区分开来。变换模块可以使用固件、硬件或软件或其组合来执行属性功能。
150.由于变换模块提供的频率没有来自由于相对移动所致的频移的输入,或者没有来自由于相对移动所致的频移的实质性输入,因此所确定的频移可以用于近似反射对象和lidar系统之间的距离。例如,电子器件可以使用等式3:来近似反射对象和lidar系统(r0)之间的距离,其中可以近似为从变换模块输出的峰值频率,并且c是光速。
151.速度分支可以被配置为使用第一数据信号和第二数据信号来确定或至少近似lidar系统和反射对象的径向速度。在图1至图5的上下文中公开的具有作为时间的函数的频率的lidar输出信号可以被lidar输出信号代替,其中lidar输出信号的频率不是时间的
函数。例如,lidar输出信号可以是连续波(cw)。例如,在第二时段期间,经调制的传出lidar信号以及相应的lidar输出信号可以是未线性调频的连续波(cw)。作为示例,经调制的传出lidar信号以及相应的lidar输出信号可以由等式2:表示,其中g和h是常数,并且t表示时间。在一些情况下,g表示传出lidar信号功率的平方根,和/或h表示来自等式1的常数f。在光源的输出具有对经调制传出lidar信号所期望的波形的情况下,电子器件不需要操作调制器114以便修改传出lidar信号。在这些情况下,(一个或多个)光源的输出可以充当经调制传出lidar信号,并相应地充当lidar输出信号。在一些情况下,电子器件操作调制器114,以便生成具有期望形式的经调制传出lidar信号。
152.由于lidar输出信号的频率在第二时段内是恒定的,因此改变反射对象和lidar系统之间的距离不会引起lidar输入信号的频率改变。结果,分离距离对lidar输入信号的频率相对于lidar输出信号的频率的偏移没有贡献。因此,分离距离的影响已经从lidar输入信号的频率相对于lidar输出信号的频率的偏移中移除或基本上移除。
153.速度分支包括第一速度分支线260和第二速度分支线260。在第二时段期间,第一速度分支线260将第一数据信号携带到模数转换器(adc)164,模数转换器(adc)164将第一数据信号从模拟形式转换成数字形式,并输出第一数字数据信号。如上面所讨论的,通过以采样速率对第一数据信号进行采样来完成第一数据信号的转换。使用连续波作为lidar输出信号基本上移除了反射对象和lidar系统之间的距离对复合信号和所得电信号的拍动影响。因此,降低了拍动,并且降低了所需的采样速率。
154.第二速度分支线262将第二数据信号携带到模数转换器(adc)266,模数转换器(adc)266将第二数据信号从模拟形式转换成数字形式,并输出第二数字数据信号。如上面所讨论的,第二数据信号的转换包括以采样速率对第二数据信号进行采样。使用连续波作为lidar输出信号基本上减少或消除了反射对象与lidar系统之间的距离对第二复合信号和所得电信号的拍动的影响。因此,降低了拍动,并且降低了所需的采样速率。
155.模数转换器(adc)264的采样速率可以与模数转换器(adc)266的采样速率相同或不同。
156.速度分支包括变换模块268,其接收来自模数转换器(adc)264的第一数字数据信号和来自模数转换器(adc)266的第二数字数据信号。由于第一数据信号是同相分量,并且第二数据信号是正交分量,所以第一数据信号和第二数据信号一起充当复数速度数据信号,其中第一数据信号是实分量,并且第二数据信号是虚分量。结果,第一数字数据信号可以是数字速度数据信号的实部,并且第二数据信号可以是数字速度数据信号的虚部。变换模块168可以被配置为对数字速度数据信号执行复变换,以便从时域转换到频域。这种转换为lidar输入信号相对于由反射对象和lidar系统之间的径向速度引起的lidar输入信号的频率偏移提供了明确的解决方案。合适的复变换是傅立叶变换,诸如复快速傅立叶变换(fft)。变换模块可以使用固件、硬件或软件或其组合来执行属性功能。
157.因为变换模块268提供的频移由于反射对象与lidar系统之间的分离距离而没有来自频移的输入,并且由于速度数据信号的复杂性质,变换模块268的输出可以用于近似反射对象和lidar系统之间的径向速度。例如,电子器件可以使用等式4:来近似反射对象和lidar系统之间的径向速度(v),其中近似为从变换模块268输出的峰值频率,
c是光速,并且表示lidar输出信号的频率。
158.可以向图10b的示意图添加附加的部件。例如,当lidar系统生成多个lidar输出信号或与生成lidar输出信号的其他lidar系统一起使用时(即,借助于频分或波分复用、fdm/wmd),lidar系统可以包括一个或多个滤波器,以从拍动数据信号和/或速度数据信号的实部和/或虚部中移除干扰信号。因此,除了所图示的部件之外,lidar系统可以包括一个或多个滤波器。合适的滤波器包括但不限于低通滤波器。在光学设计的情况下,如果干扰分量的频率落在(一个或多个)平衡检测器的带宽之外,则附加滤波可能不是必需的,因为它可以由(一个或多个)平衡检测器有效地提供。
159.在第一时段和第二时段期间使用的采样速率可以被选择为具有大于或等于从由第一时段的最小采样速率和第二时段的最小采样速率组成的组中选择的两个值中的较大一个的值。例如,在第一时段期间,第一时段采样速率(f
s1
)的速率范围可以由确定,其中表示lidar输出信号的传送和lidar输入信号的接收之间的最大时间量。在第二时段期间,第二时段采样速率(f
s2
)的速率范围可以由确定,其中表示lidar输入信号相对于lidar系统将为其提供可靠结果的lidar输入信号的多普勒频移的最大水平。最大值由lidar系统将为其提供可靠结果的最大水平确定。因此,最大距离一般对应于在lidar规范中设置的视场距离,并且最大多普勒频移一般对应于在规范中设置的最大径向速度值处出现的多普勒频移。这两个等式示出了,第一时段的最小采样速率为,并且第二时段的最小采样速率为。结果,采样速率被选择为具有大于或等于和中较大一个的值。换句话说,在第一时段和第二时段期间使用的采样速率()是。在一些情况下,在第一时段和第二时段期间使用的采样速率()大于或等于0.1 ghz、0.2 ghz或0.5 ghz和/或小于1 ghz、2 ghz或4 ghz。
160.上面对lidar系统操作的描述假设在实用波导16上存在调制器;然而,调制器是可选的。在这些情况下,电子器件可以操作(一个或多个)光源10,以便在第一时段期间增加传出lidar信号的频率,并且在第二时段期间,电子器件可以降低传出lidar信号的频率。218年5月15日提交的题为“optical sensor chip”并以其整体并入本文的美国专利申请序列号62/671,913中公开了用于从所得复合信号中提取lidar数据的合适方法。
161.电子器件可以操作放大器20。放大器20可以是振幅放大器。因此,电子器件可以操作放大器,以便增加传出lidar信号和/或传入lidar信号的功率。结果,放大器可以增加(一个或多个)lidar输出信号和/或(一个或多个)lidar输入信号的功率。当lidar系统在放大器芯片上包括多个放大器时,电子器件可以独立操作放大器。替代地,电子器件可以同时操作放大器。作为放大器同时操作的示例,电子器件操作串联或并联连接的放大器。
162.一个或多个放大器20可以集成到lidar芯片的平台上。例如,一个或多个放大器20可以集成到构造在绝缘体上硅晶片上的lidar芯片上。可以集成到绝缘体上硅晶片上的放大器构造的示例可以在2011年10月14日提交的美国专利申请序列号13/317,340中找到,该美国专利申请名称为“gain medium providing laser and amplifier functionality to optical devices”,并且以其整体并入本文。
163.在一些情况下,一个或多个放大器20被包括在与lidar芯片分离并附接到lidar芯
片的芯片上。用于将包括一个或多个放大器的芯片附接到lidar芯片的合适方法包括但不限于倒装芯片结合。
164.图11a是lidar芯片的一部分的透视图,其包括用于将lidar芯片与放大器芯片光学耦合的界面。lidar芯片的图示部分包括定大小为容纳辅助器件的止动凹槽330。止动凹槽330延伸穿过透光介质80并进入基底81。在图示的版本中,止动凹槽330延伸穿过透光介质80、掩埋层82,并进入衬底84。
165.实用波导16的刻面18充当止动凹槽30的横向侧。尽管未示出,但实用波导16的刻面31可以包括抗反射涂层。合适的抗反射涂层包括但不限于:诸如氮化硅或氧化铝的单层涂层,或者可以包含氮化硅、氧化铝和/或二氧化硅的多层涂层。
166.一个或多个止动件332从止动凹槽330的底部向上延伸。例如,图11a图示了从止动凹槽330的底部向上延伸的四个止动件332。止动件332包括定位在基部336上的包层334。衬底84可以充当止动件332的基部336,并且止动件332可以排除掩埋层82。包括在止动件332中的衬底84的部分可以从止动件凹槽330的底部延伸到掩埋层82的水平。例如,可以通过蚀刻穿过掩埋层82并使用下面的衬底84作为蚀刻止动件来形成止动件332。结果,基部336的顶部相对于实用波导16中的光信号的光学模式的位置是众所周知的,因为掩埋层82限定了第二波导的底部,并且基部336的顶部紧接地定位在掩埋层82的下方。包层334可以形成在止动件332的基部336上,以便为止动件332提供一个高度,该高度将在实用波导16和放大器芯片上的放大器波导之间提供期望的对准。
167.附接垫338定位在止动凹槽330的底部上。一旦放大器芯片定位在lidar芯片上,附接垫338就可以用于相对于lidar芯片固定放大器芯片。在一些情况下,附接垫338还提供lidar芯片和放大器芯片上的一个或多个放大器之间的电通信。合适的附接垫338包括但不限于垫。
168.图11b是放大器芯片的一个实施例的透视图。图示的放大器芯片在被称为平面光学器件的器件类别内。放大器芯片包括限定在增益介质340中的放大器波导21。合适的增益介质包括但不限于inp、ingaasp和gaas。
169.延伸到增益介质340中的沟槽374在增益介质340中限定了脊形376。脊形376限定了放大器波导21。在一些情况下,增益介质340包括脊形中和/或延伸穿过脊形376的一个或多个层341。一个或多个层341可以定位在增益介质340的不同区域之间。一个或多个层341上方的增益介质340的区域可以与一个或多个层341下方的增益介质340的区域相同或不同。可以选择这些层来将通过放大器波导21引导的光信号约束在相对于脊形376的特定位置。每个层341可以具有不同的材料组成,该材料包括从由in、p、ga和as组成的组中选择的两种或更多种成分,或者由所述成分组成。在一个示例中,增益介质340是inp,并且一个或多个层341各自包括以不同比率的ga和as。
170.放大器波导21在第一刻面19和第二刻面22之间提供光学路径。尽管未示出,但第一刻面19和/或第二刻面22可以可选地包括抗反射涂层。合适的抗反射涂层包括但不限于诸如氮化硅或氧化铝的单层涂层,或者可以包含氮化硅、氧化铝和/或二氧化硅的多层涂层。
171.放大器芯片包括一个或多个附接垫354,其可以用于相对于lidar芯片固定放大器芯片。合适的附接垫354包括但不限于焊垫。
172.放大器芯片还包括一个或多个对准凹槽356。图11b中的虚线示出了对准凹槽356之一的深度和形状。
173.图11c和图11d图示了包括与图11b的放大器芯片对接的图11a的lidar芯片的lidar系统。图11c是lidar系统的俯视图。图11d是通过lidar芯片上的实用波导16和放大器芯片上的放大器波导21取得的系统横截面的侧视图。例如,图11d的横截面可以是沿着延伸穿过图11c中标记为b的括号的线取得。图11c和图11d均包括虚线,其图示了定位在系统中其他特征后面的特征。例如,图11c包括示出放大器波导21的脊形376的虚线,即使脊形376定位在增益介质340下方亦如此。附加地,图11d包括虚线,其图示了定位在放大器波导21的脊形376后面的止动件332和对准凹槽356的部分的位置。图11d还包括图示了实用波导16的脊形86与限定实用波导16的平板区域88对接的位置的虚线,还有图示了放大器波导21的脊形376与放大器芯片的平板区域374对接的位置的虚线。
174.放大器芯片定位在lidar芯片上的止动凹槽330中。放大器芯片被定位成使得放大器波导21的脊形376定位在放大器芯片的底部和lidar芯片的基底21之间。因此,放大器芯片在止动凹槽330中倒置。焊料或其他粘合剂358接触止动凹槽330底部上的附接垫338和放大器芯片上的附接垫354。例如,焊料或其他粘合剂358从止动凹槽330底部上的附接垫338延伸到辅助器件上的附接垫354。因此,焊料或其他粘合剂358相对于lidar芯片固定辅助器件。
175.实用波导16的刻面18与放大器波导21的第一刻面19对准,使得实用波导16和放大器波导21可以交换光信号。如标记为a的线所示,该系统提供水平过渡路径,使得光信号在lidar芯片和放大器芯片之间行进的方向相对于基底21的上表面和/或下表面平行或基本平行。放大器波导21的第一刻面19的顶部处于实用波导的刻面18的顶部之下的水平。
176.lidar芯片上的一个或多个止动件332各自被容纳在辅助器件上的对准凹槽356之一内。每个止动件332的顶部接触对准凹槽356的底部。结果,止动件332和对准凹槽356的底部之间的相互作用防止放大器芯片朝向lidar芯片的附加移动。在一些情况下,辅助器件搁置在止动件332的顶部上。
177.如从图11d显而易见的,放大器波导21的第一刻面19与lidar芯片上的实用波导16的刻面18垂直对准。如从图11c显而易见的,放大器波导21的第一刻面19与lidar芯片上的实用波导16的刻面18水平对准。水平对准可以通过对准放大器芯片和lidar芯片上的标注和/或特征来实现。
178.垂直对准可以通过控制lidar芯片上的止动件332的高度来实现。例如,止动件332的基部336上的包层334可以生长到将放大器波导21的第一刻面19放置在相对于lidar芯片上的实用波导16的刻面18的特定高度处的高度。通过使用沉积技术、诸如蒸发、等离子体增强化学气相沉积(pecvd)和/或溅射来沉积一个或多个包层,可以准确地实现期望的包层334厚度。结果,一个或多个包层可以沉积在止动件332的基部336上,以便将止动件332形成为提供期望的垂直对准的高度。用于包层334各层的合适材料包括但不限于二氧化硅、氮化硅和聚合物。
179.在图11d中,第一刻面19与刻面18间隔开标记为d的距离。由于放大器波导仅与一个波导光学对准,因此第一刻面19可以比在现有配置的情况下可能的更靠近刻面18。例如,第一刻面19和刻面18之间的距离可以小于5、3或1和/或大于0.0。在图11d中,
lidar芯片所定位的大气定位在第一刻面19和刻面18之间的间隙中;然而,其他间隙材料可以定位在间隙中。例如,固体间隙材料可以定位在间隙中。合适的间隙材料的示例包括但不限于环氧树脂和聚合物。
180.从由刻面18、第一刻面19和第二刻面22组成的组中选择的一个或多个刻面可以相对于终止于刻面的波导的传播方向具有非垂直的角度。例如,图12a是经修改的图11c的系统的俯视图,使得刻面18相对于光信号在通过刻面18处的实用波导16的传播方向成角度。光信号沿着通过实用波导16和放大器波导21的光学路径的传播方向由标记为d
prop
的虚线示出。图12a还示出了第一刻面19相对于光信号通过第一刻面19处的放大器波导21的传播方向成角度,并且第二刻面22相对于光信号通过第二刻面22处的放大器波导21的传播方向成角度。如图11d中显而易见的,在一些情况下,从由刻面18、第一刻面19和第二刻面22组成的组中选择的一个或多个刻面垂直于lidar芯片的平面,诸如lidar芯片的底部。例如,从由刻面18、第一刻面19和第二刻面22组成的组中选择的一个或多个刻面垂直于衬底,诸如掩埋层82、衬底84或放大器20的平面。
181.如图12a中所示,角度的值可以小于90
°
。尽管角度和角度的值在图12a中示为90
°
,但是角度的值和/或角度的值可以小于90
°
,如图12b中所示。
182.从由角度、角度和角度组成的组中选择的所有或部分角度的值可以相同或不同。例如,尽管图12a和图12b将角度的值图示为等于角度的值,但是角度的值可以不同于角度的值。尽管图12b将角度的值图示为等于角度的值,但是角度的值可以不同于角度的值,如图12c中所示。角度的值和角度的值的差可以通过使用如图12c中所示的弯曲放大器波导21来实现。弯曲波导允许包含第一刻面19和第二刻面22的放大器20的横向侧平行,同时仍然具有对于第一刻面19和第二刻面22所期望的角度。替代地,角度的值和角度的值的差可以通过使用直的放大器波导21来实现,同时放大器20的横向侧不平行。
183.角度的合适值包括但不限于大于70
°
、75
°
或80
°
和/或小于81
°
、85
°
或90
°
的角度。角度的合适值包括但不限于大于70
°
、75
°
或80
°
和/或小于81
°
、85
°
或90
°
的角度。角度的合适值包括但不限于大于70
°
、80
°
或90
°
的角度。
184.在一些情况下,从由角度、角度和角度组成的组中选择的全部或部分角度的值被选择来实现一个或多个功能。例如,可以选择从由角度、角度和角度组成的组中选择的一个、两个或三个角度的值来减小波导中的背反射的影响。例如,可以选择角度的值来减少实用波导16中的背反射,可以选择角度的值来减少放大器波导21中的背反射,和/或可以选择角度的值来减少放大器波导21中的背反射。选择用于减少背反射影响的角度的合适值是大于70
°
、75
°
或80
°
和/或小于81
°
、85
°
或90
°
的角度。在另一个示例中,角度的值是90
°
,以便简化激光系统的封装。在另一个示例中,角度为90
°
,而角度的值小于90
°
,并且的值小于90
°
。在另一个示例中,角度为90
°
,而角度的值在75
°
和85
°
之间,并且的值在75
°
和85
°
之间。
185.图11b至图11d的放大器芯片可以修改为包括多个放大器,以提供适用于在图5的
lidar系统中使用的放大器芯片。例如,图13是修改为包括两个放大器的图11b至图11d的放大器芯片的透视图。lidar芯片可以包括电连接器,诸如金属迹线和/或焊料凸块,其提供附接垫354之间的电连接,以便并联或串联连接放大器。替代地,放大器芯片可以包括允许放大器独立操作的附加附接垫(未示出)。
186.可以修改图11b至图11d的放大器芯片,使得光信号在进入放大器波导21时行进的方向和光信号在离开放大器波导21时行进的方向之间的角度小于180
°
,以提供适用于图6a的lidar系统中使用的放大器芯片。例如,图14是经修改的图11b至图11d的放大器芯片的透视图,使得光信号在进入放大器波导21时行进的方向平行于或基本平行于光信号在离开放大器波导21时行进的方向。结果,传出lidar信号在进入放大器波导时的行进方向与传出lidar信号在离开放大器波导时的行进方向之间的角度为0
°
。放大器芯片包括顶侧和底侧之间的多个横向侧。光信号通过与光信号离开放大器波导21相同的横向侧进入放大器波导21。
187.图15图示了输出部件的示例,该输出部件包括光束操纵能力,并且适合用作图6a的输出部件。输出部件可以与根据图1至图2和/或根据图3a至图5构造的lidar芯片结合使用。例如,输出部件178包括分离器484,其可以从图1的实用波导16或者从图3a至图5的一个或多个lidar信号波导124或者从图6a的lidar信号波导176的第二部分接收传出光信号。分离器484将传出光信号划分成多个输出信号,每个输出信号被携带在操纵波导486上。每个操纵波导在刻面488处结束。刻面被布置成使得通过刻面离开芯片的输出信号组合以形成(一个或多个)lidar输出信号。
188.分离器484和操纵波导486可以被构造成使得在相邻操纵波导的刻面处的输出信号之间没有相位差。例如,分离器可以被构造成使得每个输出信号在离开分离器时同相,并且每个操纵波导可以具有相同的长度。替代地,分离器484和操纵波导486可以被构造成使得在相邻操纵波导的刻面处的输出信号之间存在线性增加的相位差。例如,操纵波导可以被构造成使得操纵波导编号j的相位是,其中j是从1到n的整数,并且表示当操纵波导如图8中所示被依次编号时与操纵波导相关联的编号,f是当相位调谐器(下面讨论)不影响相位差时近邻操纵波导之间的相位差,并且是在操纵波导k =1的刻面处的输出信号的相位。因为通道可以具有不同的波长,所以f和的值可以各自与通道之一相关联。在一些情况下,该相位差是通过构造操纵波导使得操纵波导具有线性增加的长度差来实现的。例如,操纵波导j的长度可以由表示,其中k是从1到k的整数,并且表示当操纵波导如图15中所示依次编号时与操纵波导相关联的编号,是近邻操纵波导之间的长度差,并且是操纵波导k = 1的长度。因为是在输出信号中包含的不同通道波长的不同百分比,所以每个不同的lidar输出信号以不同的方向()远离lidar芯片行进。当操纵波导长度相同时,的值为零,并且f的值为零。合适的包括但不限于大于0或5和/或小于10或15的。合适的f包括但不限于大于或和/或小于或的f。合适的n包括但不限于大于10或500和/或小于1000或2000的n。分离器484不需要具有解复用功能性。合适的分离器484包括但不限于星形耦合器、级联y型结和级联1x2 mmi耦合器。
189.相位调谐器490可以可选地沿着操纵波导的至少一部分定位。尽管相位调谐器示出为沿着第一和最后一个操纵波导定位,但是这些相位调谐器是可选的。例如,芯片不需要
在操纵波导j =1上包括相位调谐器。
190.电子器件可以被配置为操作相位调谐器,以便在相邻操纵波导的刻面处的输出信号之间创建相位差。电子器件可以操作相位调谐器,使得相位差恒定,因为它跨操纵波导线性增加。例如,电子器件可以操作相位调谐器,使得操纵波导编号k的调谐器感应相位是,其中k是从1到n的整数,并且表示当操纵波导如图15中所示依次编号时与操纵波导相关联的编号,是近邻操纵波导之间的调谐器感应相位差。因此,操纵波导编号k的相位是。图15图示了仅具有4个操纵波导的芯片,以便简化说明,然而,芯片可以包括更多操纵波导。例如,芯片可以包括多于4个操纵波导、多于100个操纵波导、或者多于1000个操纵波导和/或少于10000个操纵波导。
191.电子器件可以被配置为操作相位调谐器,以便调谐相位差的值。调谐相位差的值改变lidar输出信号远离芯片()行进的方向。因此,电子器件可以通过改变相位差来扫描lidar输出信号。lidar输出信号可以被扫描的角度范围是,并且在一些情况下,从延伸到,其中当= 0时,在lidar输出信号的方向上测量。当的值不为零时,长度差引起衍射,使得不同波长的光以不同的方向()远离芯片行进。因此,当传出lidar信号远离芯片行进时,可能存在传出lidar信号的一些扩散。此外,当时,改变衍射水平改变了传出lidar信号远离芯片行进的角度。然而,为操纵波导提供长度差()可以简化芯片上操纵波导的布局。
192.关于根据图15构造的输出部件178的构造和操作的附加细节可以在2018年6月5日提交并且以其整体并入本文的美国临时专利申请序列号62/680,787中找到。
193.除了lidar芯片之外,lidar系统还可以包括光学部件。例如,lidar系统可以包括接收从lidar芯片传送的一个或多个lidar输出信号的一个或多个透镜。在一些情况下,透镜被定位成以便聚焦一个或多个lidar输出信号或准直一个或多个lidar输出信号。图16图示了包括透镜500的lidar系统,透镜500被定位成接收从lidar芯片传送的一个或多个lidar输出信号,并准直一个或多个lidar输出信号。在上面说明的实施例中,lidar输出信号可以远离lidar系统行进,并充当系统输出信号。在图16的lidar系统中,来自透镜的光输出可以充当系统输出信号。
194.尽管图13至图16中的刻面被图示为垂直于放大器波导21中光信号的传播方向,但是图13至图16中的放大器可以被构造成使得所有或部分刻面不垂直于放大器波导21中光信号的传播方向,如图12a至图12c的上下文中所公开的。类似地,lidar芯片上与放大器波导21对接的波导可以被构造成使得所有或部分刻面不垂直于光信号在波导中传播的方向,如图12a至图12c的上下文中所公开的。
195.lidar系统可以包括接收从lidar芯片传送的一个或多个lidar输出信号的光纤。图17图示了接收从lidar芯片传送的一个或多个lidar输出信号的光纤。光纤包括芯504上的包层502。芯504与第二刻面22对准,因此芯504和放大器波导可以交换光信号。用于相对于lidar芯片固定光纤末端的合适机构包括但不限于光纤块、v形槽和套圈。lidar系统可以输出远离lidar系统行进的系统输出信号,并且包括由光纤接收的lidar输出信号的一部分或由该部分组成。在被定位在lidar系统之外的对象反射之后,全部或部分反射光可以返回到光纤和放大器波导。
196.针对lidar芯片可以采用多种平台。合适的平台包括但不限于绝缘体上硅晶片。上述部件中的一个或多个和/或上述部件的部分可以与芯片整合在一起,或者可以利用诸如倒装芯片结合技术之类的技术放置在芯片上。例如,光源110和/或光子源111可以包括增益元件和一个或多个其他部件,诸如波导。波导可以与芯片整合在一起,并且增益元件可以是与芯片分离但是利用倒装芯片结合而附接到芯片的部件。替代地,上述lidar系统可以用分立部件构造。例如,所有或部分波导可以是连接分立部件的光纤。替代地,lidar系统的一个或多个部分可以集成在芯片上,而其他部分是分立部件。例如,实用波导16可以是或包括光纤,该光纤提供光源110和光学芯片之间的光学通信,该光学芯片包括lidar系统的其余部分。
197.鉴于这些教导,本领域普通技术人员将容易想到本发明的其他实施例、组合和修改。因此,本发明将仅受以下权利要求的限制,权利要求在结合以上说明书和附图查看时包括所有这样的实施例和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

