1.本技术涉及环境修复的领域,尤其是涉及一种用于蜂巢格室雨水花园的土壤修复装置。
背景技术:
2.雨水花园是一种通过自然条件或人工挖掘而形成的浅凹绿地,常常被用来汇聚并吸收来自地面的雨水,并且通过雨水花园中的植物、沙土、石块的综合作用使雨水得到净化,并使之逐渐渗入土壤,涵养地下水。
3.为了保持雨水花园中的泥土,相关技术中,公开号为cn112323760a的中国专利,公开了一种侧向高透水性的三维蜂巢土工格室,包括六边工格室,六边工格室内开设有六边槽,六边槽的底部设有呈六边状的底板,底板上开设有若干第一透水孔,底板的顶部设有若干呈环形等间距排列的固定柱,且每两个固定柱之间通过两个连接板固定,连接板上开设有若干圆孔;六边工格室的六个面均开设有与六边槽相连通的矩形槽,矩形槽内设有固定网,固定网上开设有若干第二透水孔。通过设置的底板、第一透水孔、固定网和第二透水孔之间的配合,解决了现在的土工格室的侧向透水性较差,斜坡上的雨水只会在地表上流动,导致土壤易流失的问题。
4.针对上述中的相关技术,通过蜂巢格室固定水土的雨水花园在长期污染的情况下会导致土质质量变差,土壤污染,发明人认为存在有安装有蜂巢格室的土层不便于进行土壤治理的缺陷。
技术实现要素:
5.为了便于对安装有蜂巢格室的土层进行土壤治理,本技术提供一种用于蜂巢格室雨水花园的土壤修复装置。
6.本技术提供的一种用于蜂巢格室雨水花园的土壤修复装置采用如下的技术方案:一种用于蜂巢格室雨水花园的土壤修复装置,包括机体,所述机体底部设置有便于移动机体的行走机构,所述机体上设置有设置有延伸出机体的延伸杆,所述延伸杆端部设置有驱动缸,所述驱动缸的活塞杆上安装有支撑板,所述支撑板上滑移连接有滑移板,所述支撑板上设置有驱动滑移板移动的滑移板移动的滑移缸;所述滑移板远离支撑板的一侧设置有安装板,所述安装板上设置有翻土板,所述翻土板底部设置有多个用于翻土的螺旋叶片,所述翻土板顶部设置有驱动螺旋叶片转动的驱动件;所述安装板底部设置有用于喷洒修复液体的喷洒组件;所述安装板底部四周设置有多个用于探测蜂巢格室的探测装置,所述探测装置的信号输出端电连接有控制装置,所述控制装置的输出端连接有用于显示蜂巢格室位置的显示装置。
7.通过采用上述技术方案,延伸杆上的驱动缸能够调节支撑板在机体长度方向上的位置,而滑移板上的滑移缸能够调节滑移板以及安装板在竖直方向上的位置,从而为安装板竖直移动提供动力;在翻土之前,探测装置能够对土壤中的蜂巢格室进行探测,控制装置
显示蜂巢格室的位置,便于操作人员判断螺旋叶片的位置是否处于蜂巢格室的其中一个格室的中心位置,当螺旋叶片位于格室中心位置时,驱动件驱动螺旋叶片转动,由于螺旋叶片螺旋输送的特性,因而土壤在螺旋叶片下行时能够被翻出;此时将螺旋叶片提起,能够进一步将土壤翻起,并通过喷洒机构喷洒修复液,从而便于修复液渗透至土壤深处,从而便于对土壤进行修复。
8.优选的,所述安装板中心位置开设有供翻土板转动的让位槽,所述安装槽两侧开设有与让位槽相通的安装孔,所述安装板上设置有用于驱动翻土板转动的驱动机构。
9.通过采用上述技术方案,让位槽能够供翻土板转动,而安装孔能够给驱动件和螺旋叶片让位,驱动机构在驱动翻土板转动的过程中,让位槽和安装孔能够便于翻土板转动不致产生妨碍,从而在驱动件自转的同时,翻土板公转,使得翻土更加彻底。
10.优选的,所述驱动机构包括设置在翻土板侧壁上的转动齿轮、设置在滑移板上的主动齿轮、同步带以及驱动主动齿轮转动的转动电机,所述同步带套设在转动齿轮和主动齿轮上。
11.通过采用上述技术方案,转动电机驱动主动齿轮转动,主动齿轮在同步带的作用下带动转动齿轮同步转动,转动齿轮带动翻土板在让位槽内转动,从而使得翻土更加彻底。
12.优选的,所述安装板顶壁位于安装孔上方设置有支撑架,所述支撑架位于安装孔中心处插设有限位杆,所述限位杆贯穿翻土板以对翻土板进行限位。
13.通过采用上述技术方案,支撑架的设置能够将限位杆端部的驱动件位置抬升,从而减小支撑架在翻土板转动时对其与驱动件产生妨碍;而限位杆的设置能够对翻土板的位置进行限定,使得翻土板不致移动而导致同步带松弛而无法驱动。
14.优选的,所述安装板靠近滑移板的一侧设置有连接插块,所述滑移板朝向连接插块的一侧表面设置有供连接插块插设的连接插槽,所述滑移板位于连接插槽上方螺纹连接有插设在连接插块中的限位螺栓。
15.通过采用上述技术方案,连接插块插设在连接插槽中,限位螺栓将连接插块固定在连接插槽中,能够将安装板牢固地固定在滑移板上,从而使得安装板跟随滑移板一同移动。
16.优选的,所述安装板包括两个相同的安装半壳,两个所述安装半壳沿对接面对称设置,所述安装半壳四角设置有用于固定的安装螺栓。
17.通过采用上述技术方案,安装板包括两个安装半壳并通过安装螺栓进行固定从而使得安装板能够从中间打开,当翻土板以及同步带需要检修维护时,安装板从中间打开能够将翻土板和同步带完全暴露出来,便于对翻土板以及驱动组件进行维护。
18.优选的,所述喷洒组件包括喷头、喷淋管、增压泵和集液箱,所述喷头安装在安装板底部,所述喷淋管与喷头相通,所述增压泵的出水管连接于喷淋管,所述增压泵的进水管连接于集液箱。
19.通过采用上述技术方案,增加泵从集液箱中抽取修复液并通过喷淋管和喷头喷洒出去,从而能够在翻土完成后,将修复液喷洒至翻出的土壤上,土壤在经过翻土后变得松软,修复液能够迅速渗透至土壤深层并与污染物相结合发生反应,从而便于对土壤进行修复。
20.优选的,所述集液箱安装于机体远离延伸杆的一端,所述机体位于集液箱一侧设
置有配重块。
21.通过采用上述技术方案,集液箱安装在机体远离延伸杆的一端使得集液箱能够作为配重的一部分与配重块一起增加集液箱远离延伸杆一端的重量,使得集液箱在进行翻土时不致一端翘起,从而保证了翻土的稳定。
22.优选的,所述支撑板两侧设置有加强肋,所述滑移板设置有供加强肋插设的定位槽。
23.通过采用上述技术方案,支撑板上的加强肋能够提高支撑板的强度,降低了支撑板在翻土过程中被折弯的几率;而定位槽的设置能够对滑移板的滑移轨迹进行限定,从而使得滑移板能够在滑移板上按照加强肋的轨迹进行移动。
24.优选的,所述控制装置包括距离转换模块和执行模块,所述距离转换模块连接于探测装置以用于将探测装置所得位置信息转化为距离数据,所述距离转换模块的数据输出端连接于执行模块的数据输入端以将距离数据传输给执行模块,所述执行模块电连接于驱动件以在各个探测装置的距离数据相等时启动驱动件。
25.通过采用上述技术方案,距离转换模块能够将探测装置探测所得涡流大小转换成探测装置距离蜂巢格室侧壁的距离,而执行模块连接于显示装置以向显示装置发送距离数据以便于显示并连接于驱动件,以在各个探测装置的距离数据相等时启动驱动件,从而开始翻土。
26.综上所述,本技术包括以下至少一种有益技术效果:1.通过采用机体、行走机构、延伸杆、驱动缸、支撑板、滑移板、滑移缸、安装板、翻土板、螺旋叶片、驱动件、让位槽、安装孔、转动齿轮、主动齿轮、同步带、转动电机、支撑架、限位杆、连接插块、连接插槽、限位螺栓、安装半壳、安装螺栓、加强肋和定位槽相配合的技术,从而便于进行翻土;2.通过采用喷头、喷淋管、增压泵、集液箱和配重块相配合的技术,从而便于将修复液喷洒至土壤中,以便土壤快速吸收;3.通过采用探测装置、控制装置、显示装置、距离转换模块和执行模块相配合的技术,从而便于避开蜂巢格室,减轻翻土对蜂巢格室的损毁。
附图说明
27.图1是本技术实施例中一种用于蜂巢格室雨水花园的土壤修复装置的整体结构示意图;图2是本技术实施例中用于展现滑移板与支撑板处结构的爆炸示意图;图3是本技术实施例中用于展现滑移板与安装板处结构的示意图;图4是本技术实施例中用于展现车体结构的示意图;图5是本技术实施例中控制装置控制关系的逻辑框图。
28.附图标记说明:1、机体;11、机壳;12、行走机构;2、延伸杆;21、驱动缸;22、支撑板;221、加强肋;222、滑移缸;23、滑移板;231、滑移孔;232、定位槽;233、连接插槽;2331、限位螺栓;24、安装板;241、安装半壳;2411、安装螺栓;242、连接插块;2430、凹陷孔;243、让位槽;2431、安装孔;2432、支撑架;2433、限位杆;25、翻土板;251、螺旋叶片;252、驱动件;3、驱动机构;31、转动齿轮;32、主动齿轮;321、驱动轮;33、同步带;34、转动电机;341、皮带轮;4、
喷洒组件;41、喷头;42、喷淋管;43、增压泵;44、集液箱;5、配重块;6、探测装置;61、控制装置;611、距离转换模块;612、执行模块;62、显示装置。
具体实施方式
29.以下结合附图1
‑
5对本技术作进一步详细说明。
30.本技术针对的土壤为基于通过蜂巢格室进行水土保持的雨水花园,由于雨水花园中埋设了蜂巢格室,并且从雨水花园的地表无法分辨出蜂巢格室的边界。此时若强行进行翻土,可能会对蜂巢格室造成破坏。
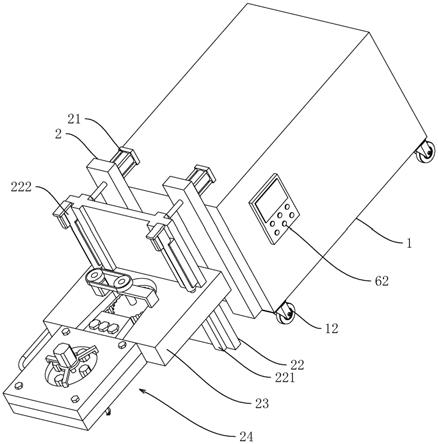
31.本技术实施例公开一种用于蜂巢格室雨水花园的土壤修复装置。参照图1,用于蜂巢格室雨水花园的土壤修复装置包括机体1,机体1上安装有机壳11,机体1底部安装有便于移动机体1的行走机构12,行走机构12可以为四个万向轮,从而便于移动机体1从而实现将机体1移动至需要土壤修复的位置。
32.参照图1,机体1上焊接固定有延伸杆2,延伸杆2沿机体1宽度方向设置有两根,每一延伸杆2远离机体1的一端端部均焊接固定有驱动缸21,驱动缸21可以为电动缸,也可以为其他能够实现控制的直线驱动器,只要能够实现直线方向上的移动即可。
33.参照图1和图2,两个驱动缸21的活塞杆端部共同焊接固定有支撑板22,驱动缸21的活塞杆焊接固定在支撑板22的顶部。支撑板22底部套设有滑移板23,支撑板22底部的两侧分别一体成型有加强肋221,加强肋221沿支撑板22宽度方向设置有两根。滑移板23靠近支撑板22的一端开设有供支撑板22适配插设的滑移孔231,滑移孔231宽度方向的两侧开设有供加强肋221适配插设的定位槽232。支撑板22沿宽度方向的两侧分别焊接固定有滑移缸222,滑移缸222可以为电动缸,也可以为其他能够实现控制的直线驱动器,只要能够实现直线方向上的移动即可。滑移缸222的活塞杆焊接固定在滑移板23的表面上,从而驱使滑移板23沿支撑板22长度方向移动。
34.参照图1和图2,滑移板23背向支撑板22的一侧安装有安装板24,安装板24为两块相同的安装半壳241拼接安装形成,两个安装半壳241沿对接面对称设置,安装半壳241的四角螺纹连接有安装螺栓2411以将两个安装半壳241固定。
35.参照图2和图3,安装板24朝向滑移板23的一侧一体成型有连接插块242,滑移板23朝向安装板24的一侧开设有供连接插块242适配插设的连接插槽233,连接插块242适配地插设在连接插槽233中以将安装板24连接在滑移板23上。滑移板23表面位于连接插槽233上方螺纹连接有限位螺栓2331,限位螺栓2331沿连接插块242长度方向设置有三根,限位螺栓2331穿过连接插块242并螺纹连接在连接插槽233的另一侧,从而将安装板24固定在滑移板23上。
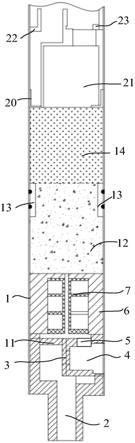
36.参照图2和图3,安装板24的对接面位于中心位置开设有凹陷孔2430,两个凹陷孔2430拼合形成让位槽243,安装板24位于让位槽243中嵌设有翻土板25。翻土板25的端面为圆形,安装板24背向对接面的一侧表面开设有与让位槽243相通的安装孔2431。安装板24顶壁焊接固定有支撑架2432,支撑架2432沿安装孔2431径向设置且位于安装孔2431上方。支撑架2432位于安装孔2431中心位置插设有限位杆2433,限位杆2433自上而下贯穿翻土板25从而对翻土板25进行限位。
37.参照图2和图3,翻土板25底壁位于中心以及限位杆2433四周插设有螺旋叶片251,
螺旋叶片251共设置有五个,位于翻土板25中心的螺旋叶片251焊接固定在限位杆2433上。螺旋叶片251自下而上穿出翻土板25的一端通过联轴器固定连接有驱动件252,驱动件252可以为伺服电机。位于翻土板25中心的驱动件252安装在支撑架2432上,限位杆2433四周的驱动件252安装在翻土板25上,从而通过驱动件252驱动螺旋叶片251转动对泥土进行翻动。
38.参照图2和图3,安装板24上安装有用于驱动翻土板25转动的驱动机构3,驱动机构3包括安装在翻土板25上的转动齿轮31、主动齿轮32、同步带33和转动电机34,转动齿轮31套设并固定连接在翻土板25的外侧壁上。滑移板23的表面开设有凹槽,主动齿轮32通过轴承转动连接在凹槽中,同步带33套设在转动齿轮31和主动齿轮32上,滑移板23开设有供同步带33穿设的穿设槽。转动电机34通过螺栓安装在滑移板23位于主动齿轮32的一侧,转动电机34的输出轴上键连接有皮带轮341,主动齿轮32中心键连接有驱动轮321,皮带轮341和驱动轮321上套设有同步皮带,从而驱动主动齿轮32转动。
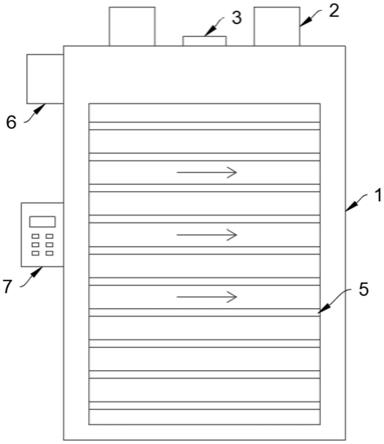
39.参照图3和图4,安装板24底部安装有喷洒组件4,喷洒组件4包括嵌置在安装板24底部的喷头41、连接在喷头41上的喷淋管42、连接于喷淋管42的增压泵43以及连接于增压泵43的集液箱44。喷淋管42为软质伸缩水管,增压泵43通过螺栓安装在机壳11内部,集液箱44安装在机体1远离延伸杆2的一端,集液箱44内填充有修复土壤的修复液,针对不同的修复环境可以更换不同的修复液。机体1位于集液箱44一侧焊接固定有配重盒,配重盒内填充有配重块5,以保证机体1的稳定性。
40.参照图4,安装板24底壁位于安装孔2431四周均匀嵌置有探测装置6,探测装置6可以为电感式传感器。电感式传感器根据涡流原理,能够探测埋设在土壤中的蜂巢格室,从而避开蜂巢格室进行翻土。
41.参照图4和图5,探测装置6的输出端电连接有控制装置61,控制装置61可以为工业计算机;控制装置61包括距离转换模块611和执行模块612,距离转换模块611连接于探测装置6以用于将探测装置6所得位置信息转化为距离数据,通过涡流的大小来计算距离。距离转换模块611的数据输出端连接于执行模块612的数据输入端以将距离数据传输给执行模块612,执行模块612电连接于驱动件252以在各个探测装置6的距离数据相等时启动驱动件252。
42.参照图1和图5,控制装置61的输出端电连接有用于显示蜂巢格室位置的显示装置62,显示装置62为安装在机体1上的显示屏,显示装置62电连接于执行装置,以将蜂巢格室侧壁距离探测装置6的距离显示在显示装置62上。
43.本技术实施例一种用于蜂巢格室雨水花园的土壤修复装置的实施原理为:在需要对土壤进行修复时,先通过行走机构12将机体1移动至待修复的位置,然后通过探测装置6探测蜂巢格室的位置。待四个探测装置6探测到距离蜂巢格室的距离均相当时,此时表示四个探测装置6恰好位于一个蜂巢格室的中心位置,此时翻土不会对蜂巢格室产生破坏。
44.控制装置61通过执行模块612控制驱动件252启动,驱动件252转动带动螺旋叶片251转动,此时滑移缸222驱动滑移板23下行,同时带动安装板24下行。此时土壤被螺旋叶片251钻选的作用下翻起。待安装板24移动至最底端时,启动转动电机34,转动电机34驱动主动齿轮32转动,主动齿轮32通过同步带33带动转动齿轮31转动。此时翻土板25随之转动,在螺旋叶片251的作用下,对整个区域内的土壤进行翻土,然后将螺旋叶片251提起,土壤会在
螺旋叶片251上提的过程中被进一步翻动。翻土完成后,启动喷洒泵,喷洒泵将集液箱44中的修复液喷洒至翻出的土壤上,从而对底层的土壤进行修复。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。