1.本发明涉及一种修复设备,尤其涉及一种环境保护用土壤修复设备。
背景技术:
2.土壤修复是指利用物理或者化学的方法将土壤中的污染物进行转移、吸收或降解,从而使得土壤能够再次安全的使用,达到保护环境的目的。
3.目前,人们在对土壤中的污染物进行去除时,通常是利用过滤网对土壤进行过滤,将土壤中的垃圾进行去除,后续需要人工对过滤出来的垃圾进行收集处理,较为的麻烦,而且需要利用高温对土壤进行杀菌,在杀菌的过程中,需要人工对土壤进行翻动,保证杀菌的效果,比较费时费力,因此,设计了一种能够自动对垃圾进行收集并且能够自动对土壤进行搅动杀菌的环境保护用土壤修复设备。
技术实现要素:
4.为了克服人工对过滤出来的垃圾进行收集处理,较为的麻烦,而且在对土壤杀菌的过程中,需要人工对土壤进行翻动,比较费时费力的缺点,技术问题为:提供一种能够自动对垃圾进行收集并且能够自动对土壤进行搅动杀菌的环境保护用土壤修复设备。
5.本发明的技术方案是:一种环境保护用土壤修复设备,包括有:底板和第一支撑块,第一支撑块对称安装在底板顶部两侧中间;防护框,防护框安装在第一支撑块内侧上部之间;导向杆,导向杆对称安装在底板顶部两侧;第一支撑板,第一支撑板滑动式安装在导向杆上部之间,第一支撑板挡住防护框底部;第五弹簧,第五弹簧安装在第一支撑板和底板之间;装料箱,装料箱放置在第一支撑板顶部中间;发热杆,发热杆对称转动式安装在装料箱内侧中部,发热杆一侧均穿过防护框;转动机构,转动机构安装在防护框一侧下部;过滤机构,过滤机构安装在装料箱内侧中部;振动机构,振动机构安装在第一支撑板顶部一侧。
6.进一步的,转动机构包括有:电机固定块,电机固定块安装在防护框一侧下部;第一伺服电机,第一伺服电机安装在电机固定块顶部;第一转动杆,第一转动杆转动式安装在防护框一侧下部中间;全齿轮,全齿轮数量至少为两个,分别安装在第一转动杆和发热杆上,相邻的两个全齿轮相互啮合;正齿轮,正齿轮安装在第一伺服电机的输出轴上,正齿轮与一侧的全齿轮啮合。
7.进一步的,过滤机构包括有:
第二转动杆,第二转动杆转动式安装在防护框内侧;连接块,连接块安装在第二转动杆一侧;固定框,固定框安装在第二转动杆上;滤网,滤网安装在固定框内侧。
8.进一步的,振动机构包括有:第一固定块,第一固定块对称安装在第一支撑板顶部两侧;气缸,气缸安装在第一固定块顶部内侧;第一转动块,第一转动块安装在气缸的伸缩杆顶部;滑块,滑块滑动式安装在固定框两侧,滑块均与同侧的第一转动块转动式连接。
9.进一步的,还包括有碾碎机构,碾碎机构包括有:固定圆环,固定圆环安装在防护框顶部中间;装料桶,装料桶安装在固定圆环内侧;盖板,盖板滑动式安装在装料桶上部;第二伺服电机,第二伺服电机安装在盖板顶部中间;挡料板,挡料板转动式安装在装料桶一侧下部;第一弹簧,第一弹簧安装在挡料板与装料桶之间;第二固定块,第二固定块安装在防护框内壁一侧;连接杆,连接杆转动式安装在第二固定块一侧,连接杆与连接块配合;皮带轮组件,皮带轮组件安装在连接杆与挡料板之间;第二弹簧,第二弹簧安装在连接杆与第二固定块之间;第三转动杆,第三转动杆安装在第二伺服电机的输出轴上,第三转动杆位于装料桶内部;转动辊,转动辊对称安装在第三转动杆下部。
10.进一步的,还包括有废料收集机构,废料收集机构包括有:滑轨,滑轨对称安装在防护框内壁一侧下部;装料斗,装料斗滑动式安装在滑轨之间,装料斗放置在第一支撑板顶部一侧;第三固定块,第三固定块对称安装在防护框内壁一侧下部,第三固定块位于滑轨内侧;限位块,限位块滑动式安装在第三固定块一侧,限位块与装料斗配合;第三弹簧,第三弹簧安装在限位块与第三固定块之间;第四固定块,第四固定块安装在防护框内壁一侧下部中间;推动块,推动块滑动式安装在第四固定块一侧,推动块与第一支撑板配合,推动块与限位块配合。
11.进一步的,还包括有推动机构,推动机构包括有:第五固定块,第五固定块安装在第一支撑板底部一侧中部;第二支撑板,第二支撑板安装在底板顶部一侧中部;第二转动块,第二转动块转动式安装在第二支撑板上部,第二转动块与第五固定块滑动配合;第二支撑块,第二支撑块安装在底板顶部一侧中部,第二支撑块位于第二支撑板
一侧;限位杆,限位杆滑动式安装在第二支撑块上部;第六弹簧,第六弹簧安装在限位杆与第二支撑块之间。
12.进一步的,还包括有把手,把手安装在第二转动块一侧,限位杆与把手配合。
13.有益效果为:1、本发明在发热杆、转动机构、过滤机构和振动机构的配合下,使得滤网上下往复摆动,从而对土壤进行过滤,然后利用发热杆转动发热,从而对土壤进行搅动杀菌,完成土壤的修复操作,省时省力。
14.2、本发明在碾碎机构的作用下,使得转动辊转动将土壤进行打散,避免土壤成团而影响后续的过滤操作。
15.3、本发明在废料收集机构和推动机构的配合下,能够自动对滤网过滤出来的垃圾进行收集,方便人们的工作,而且能够对第一支撑板进行卡住限位,避免第一支撑板在土壤的重力下往下掉落。
附图说明
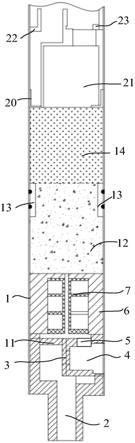
16.图1为本发明的立体结构示意图。
17.图2为本发明的部分立体结构示意图。
18.图3为本发明的转动机构立体结构示意图。
19.图4为本发明的过滤机构立体结构示意图。
20.图5为本发明的振动机构立体结构示意图。
21.图6为本发明的碾碎机构立体结构示意图。
22.图7为本发明的碾碎机构部分立体结构示意图。
23.图8为本发明的废料收集机构立体结构示意图。
24.图9为本发明的废料收集机构部分立体结构示意图。
25.图10为本发明的推动机构立体结构示意图。
26.图11为本发明的推动机构部分立体结构示意图。
27.附图标记中:1_底板,2_第一支撑块,3_防护框,4_第一支撑板,41_导向杆,42_第五弹簧,5_装料箱,6_发热杆,7_转动机构,70_电机固定块,71_第一伺服电机,72_第一转动杆,73_全齿轮,74_正齿轮,8_过滤机构,80_第二转动杆,81_连接块,82_固定框,83_滤网,9_振动机构,90_第一固定块,91_气缸,92_滑块,93_第一转动块,10_碾碎机构,100_固定圆环,101_盖板,102_装料桶,103_第二伺服电机,104_挡料板,105_第一弹簧,106_第二固定块,107_连接杆,108_皮带轮组件,109_第二弹簧,1010_第三转动杆,1011_转动辊,11_废料收集机构,110_滑轨,111_装料斗,112_第三固定块,113_限位块,114_第三弹簧,115_推动块,116_第四固定块,12_推动机构,122_第五固定块,123_第二支撑板,124_第二转动块,125_把手,126_第二支撑块,127_限位杆,128_第六弹簧。
具体实施方式
28.以下结合附图和具体实施例对本发明作具体的介绍。
29.实施例1一种环境保护用土壤修复设备,如图1
‑
图5所示,包括有底板1、第一支撑块2、防护
框3、第一支撑板4、导向杆41、第五弹簧42、装料箱5、发热杆6、转动机构7、过滤机构8和振动机构9,底板1顶部前后两侧中间均设有第一支撑块2,第一支撑块2内侧上部之间设有防护框3,底板1顶部前后两侧均左右对称设有导向杆41,导向杆41上部之间滑动式设有第一支撑板4,第一支撑板4挡住防护框3底部,导向杆41上均绕有第五弹簧42,第五弹簧42的两端分别与第一支撑板4和底板1连接,第一支撑板4顶部中间放置有装料箱5,装料箱5内侧中部前后对称转动式设有发热杆6,发热杆6右侧均穿过防护框3,防护框3右侧下部设有转动机构7,装料箱5内侧中部设有过滤机构8,第一支撑板4顶部右侧设有振动机构9。
30.转动机构7包括有电机固定块70、第一伺服电机71、第一转动杆72、全齿轮73和正齿轮74,防护框3右侧前下部设有电机固定块70,电机固定块70顶部设有第一伺服电机71,防护框3右侧下部中间转动式设有第一转动杆72,第一转动杆72右侧和发热杆6右侧均设有全齿轮73,全齿轮73数量为3,相邻的两个全齿轮73相互啮合,第一伺服电机71的输出轴上设有正齿轮74,正齿轮74与前侧的全齿轮73啮合。
31.过滤机构8包括有第二转动杆80、连接块81、固定框82和滤网83,防护框3内侧左中部转动式设有第二转动杆80,第二转动杆80后侧设有连接块81,第二转动杆80上设有固定框82,固定框82内侧设有滤网83。
32.振动机构9包括有第一固定块90、气缸91、滑块92和第一转动块93,第一支撑板4顶部前后两侧右部均设有第一固定块90,第一固定块90顶部内侧均设有气缸91,气缸91的伸缩杆顶部均设有第一转动块93,固定框82前后两侧右部均滑动式设有滑块92,滑块92均与同侧的第一转动块93转动式连接。
33.当人们需要对土壤进行修复时,首先将土壤放入防护框3中,土壤会通过滤网83往下掉落至装料箱5中,然后人工启动气缸91,控制气缸91的伸缩杆往复伸长和缩短,带动滑块92上下往复运动,从而带动固定框82和滤网83上下往复摆动,固定框82带动第二转动杆80和连接块81往复正反转动,使得滤网83对土壤进行过滤,将体积较大的垃圾过滤掉,同时启动第一伺服电机71和发热杆6,第一伺服电机71输出轴带动正齿轮74转动,正齿轮74带动全齿轮73、第一转动杆72和发热杆6转动,发热杆6会对装料箱5中的土壤进行搅拌加热,达到杀菌的目的,当土壤修复完成后,关闭气缸91、第一伺服电机71和发热杆6,然后往下按压第一支撑板4,第五弹簧42压缩,带动装料箱5往下运动,然后人工将修复完成的土壤取走,再将装料箱5放回原位,然后松开第一支撑板4,第五弹簧42恢复原状,带动第一支撑板4和装料箱5往上运动复位,最后由人工将滤网83上的垃圾处理掉即可。
34.实施例2在实施例1的基础之上,如图2、图6和图7所示,还包括有碾碎机构10,碾碎机构10包括有固定圆环100、盖板101、装料桶102、第二伺服电机103、挡料板104、第一弹簧105、第二固定块106、连接杆107、皮带轮组件108、第二弹簧109、第三转动杆1010和转动辊1011,防护框3顶部中间设有固定圆环100,固定圆环100内侧设有装料桶102,装料桶102上部滑动式设有盖板101,盖板101顶部中间设有第二伺服电机103,装料桶102左侧下部转动式设有挡料板104,挡料板104左侧与装料桶102之间设有第一弹簧105,防护框3内壁左侧后上部设有第二固定块106,第二固定块106右侧转动式设有连接杆107,连接杆107与连接块81配合,连接杆107中部与挡料板104后侧之间设有皮带轮组件108,皮带轮组件108由两个皮带轮和一根皮带组成,连接杆107中部和挡料板104后侧均设有一个皮带轮,两个皮带轮之间绕有皮
带,连接杆107与第二固定块106之间设有第二弹簧109,第二伺服电机103的输出轴上设有第三转动杆1010,第三转动杆1010位于装料桶102内部,第三转动杆1010下部左右对称设有转动辊1011。
35.初始状态时,气缸91的伸缩杆为伸长状态,固定框82为倾斜状态,挡料板104挡住装料桶102底部,当人们需要对土壤进行修复时,首先将盖板101往上拉动打开,盖板101带动其上所有部件往上运动,然后人工将土壤加入装料桶102中,挡料板104会将土壤挡住,再将盖板101往下拉动复位,盖板101带动其上所有部件往下运动复位,然后启动第二伺服电机103,第二伺服电机103输出轴带动第三转动杆1010和转动辊1011转动,从而将土壤打散,土壤打散后,关闭第二伺服电机103,第三转动杆1010和转动辊1011停止转动,然后启动气缸91,控制气缸91的伸缩杆缩短,从而带动固定框82和滤网83往下转动,使得固定框82转动至水平状态,从而带动第二转动杆80和连接块81顺时针转动,当连接块81与连接杆107接触时,带动连接杆107顺时针转动,第二弹簧109发生形变,连接杆107通过皮带轮组件108带动挡料板104转动,第一弹簧105发生形变,使得挡料板104不再挡住装料桶102底部,打散后的土壤能够往下掉落至滤网83上,从而对土壤进行过滤,过滤结束后,控制气缸91的伸缩杆伸长,从而带动固定框82和滤网83往上转动复位,使得固定框82转动至倾斜状态,从而带动第二转动杆80和连接块81逆时针转动复位,使得连接块81与连接杆107分离,第二弹簧109恢复原状,带动连接杆107逆时针转动复位,连接杆107通过皮带轮组件108带动挡料板104反转复位,第一弹簧105恢复原状,使得挡料板104重新挡住装料桶102底部,然后关闭气缸91,再后续对土壤进行杀菌即可。
36.实施例3在实施例2的基础之上,如图2、图8、图9、图10和图11所示,还包括有废料收集机构11,废料收集机构11包括有滑轨110、装料斗111、第三固定块112、限位块113、第三弹簧114、推动块115和第四固定块116,防护框3内壁左侧下部前后对称设有滑轨110,滑轨110之间滑动式设有装料斗111,装料斗111放置在第一支撑板4顶部左侧,防护框3内壁左侧下部前后对称设有第三固定块112,第三固定块112位于滑轨110内侧,第三固定块112右侧均滑动式设有限位块113,限位块113与装料斗111配合,限位块113内侧与同侧的第三固定块112之间均设有第三弹簧114,防护框3内壁左侧下部中间设有第四固定块116,第四固定块116右侧滑动式设有推动块115,推动块115与第一支撑板4配合,推动块115与限位块113配合。
37.还包括有推动机构12,推动机构12包括有第五固定块122、第二支撑板123、第二转动块124、把手125、第二支撑块126、限位杆127和第六弹簧128,第一支撑板4底部右侧中部设有第五固定块122,底板1顶部右侧中部设有第二支撑板123,第二支撑板123上部转动式设有第二转动块124,第二转动块124与第五固定块122滑动配合,第二转动块124右侧设有把手125,底板1顶部右侧中部设有第二支撑块126,第二支撑块126位于第二支撑板123右侧,第二支撑块126上部滑动式设有限位杆127,限位杆127与把手125配合,限位杆127右侧与第二支撑块126之间设有第六弹簧128。
38.初始状态时,第三弹簧114处于拉伸状态,当固定框82转动至倾斜状态时,会将较大的垃圾倒入装料斗111中,往土壤修复完成后,往右拉动限位杆127,第六弹簧128拉伸,使得限位杆127松开把手125,然后往上转动把手125,带动第二转动块124转动,再松开限位杆127,第六弹簧128恢复原状,带动限位杆127往左运动复位,同时第二转动块124带动第五固
定块122和第一支撑板4往下运动,第五弹簧42压缩,第一支撑板4带动装料斗111往下运动,此时第一支撑板4与推动块115分离,第三弹簧114恢复原状,带动限位块113往外侧运动,限位块113挤压推动块115往下运动,然后人工将装料斗111取出,将垃圾倒掉,再将装料斗111放回原位,然后往上推动装料斗111复位,当装料斗111与限位块113接触时,挤压限位块113往内侧运动,第三弹簧114拉伸,当限位块113与装料斗111上的方孔对齐时,第三弹簧114恢复原状,带动限位块113往外侧运动卡住装料斗111,然后人工反转把手125,带动第二转动块124反转复位,第二转动块124带动第五固定块122和第一支撑板4往上运动复位,第五弹簧42恢复原状,当第一支撑板4与推动块115接触时,带动推动块115往上运动,推动块115挤压限位块113往内侧运动,第三弹簧114拉伸,使得限位块113松开装料斗111,装料斗111往下掉落至第一支撑板4顶部,当把手125与限位杆127接触时,挤压限位杆127往右运动,第六弹簧128拉伸,当把手125越过限位杆127时,第六弹簧128恢复原状,带动限位杆127往左运动复位卡住把手125,防止人们误触把手125。
39.尽管参照上面实施例详细说明了本发明,但是通过本公开对于本领域技术人员显而易见的是,而在不脱离所述的权利要求限定的本发明的原理及精神范围的情况下,可对本发明做出各种变化或修改。因此,本公开实施例的详细描述仅用来解释,而不是用来限制本发明,而是由权利要求的内容限定保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。