1.本发明属于清洗设备领域,具体涉及一种壁面清洗机及其应用。
背景技术:
2.对于养殖场的水泡粪池、化粪池、沼气池等池壁或槽壁的洗涤,一直通过人工进入水泡粪池、化粪池或沼气池中去清洗,这种方式存在诸多缺点:一是劳动力高,劳动效率低;二是这些需清洗的场所大多数阴暗潮湿,环境恶劣,空气质量差,对操作人员体质要求高,且在清洗过程中,不仅清洗污物容易接触人,而且有毒有害物质(气体、液体等)易造成人员伤害,如果清洗前未通风排尽有害气体,甚至会导致人员伤亡;三是人工清洗耗水量大,后期处理污水量大,处理费用增加;此外,由于养殖场所大都属于封闭式场所,其对环境和卫生要求高,不适合大型清洗机械作业。
技术实现要素:
3.针对背景技术中存在的问题,本发明目的在于提供一种壁面清洗机及其在池壁或槽壁清洗中的应用。
4.为了实现上述目的,本发明采用了如下所述技术方案。
5.一种壁面清洗机,包括行走机器人、清洗部和控制系统,在行走机器人上设置有调节机构,清洗部连接调节机构,控制系统连接用于控制行走机器人和调节机构按照设定程序动作,通过控制系统和调节机构对清洗部的方向和位置进行调节;调节机构的动作方式包括水平伸缩调节和高度调节,通过水平伸缩调节改变清洗部的水平位置,通过高度调节改变清洗部的高度。
6.根据本发明的一个优选方案,调节机构的动作方式还包括偏转调节,通过偏转调节将清洗部定位于同一立面的水平方向、竖直方向或者水平方向与竖直方向之间的任意方位。
7.为提高壁面清洗效果,在清洗部的清洗帚上配置有高压喷淋系统,高压喷淋系统的喷嘴正对清洗壁面。
8.根据本发明的一个实施例,调节机构包括立式布置的杆体和斜向布置的伸缩调节部,在杆体上铰接设置有伸缩臂,伸缩调节部其中一端被固定,伸缩调节部另一端铰接连接伸缩臂;在伸缩调节部外侧设置有帚位调节部,帚位调节部一端铰接连接伸缩臂,帚位调节部另一端铰接连接清洗部的安装件;调节过程中,通过伸缩调节部调节伸缩臂的高度和偏转方位,通过帚位调节部调节清洗部的高度和偏转方位,通过伸缩臂调节清洗部的水平位置。这样的结构便于在不同高度实现清洗部与清洗壁面的完美吻合。
9.为提高壁面清洗机的稳定性,以杆体的轴线为对称中心线,伸缩调节部、伸缩臂、帚位调节部、清洗部分别对称设置有两套;或者,杆体其中一侧设置调节机构和清洗部,杆体另一侧设置可贴壁面行走的行走部。作为更优选,行走部包括立式布置的轮臂,轮臂上下两端分别设置有轮座,轮座内侧连接在杆体上,轮座外侧设置有轮子,清洗过程中,轮子贴
靠壁面行走。前述“杆体其中一侧设置行走部”相当于将其中一套调节机构和清洗部更换成行走部,主要适用于槽宽或池宽较小的情况,例如槽宽或池宽小于两个伸缩臂最短尺寸的情况。
10.为进一步提高壁面清洗机的稳定性,由两个伸缩调节部、杆体和两个伸缩臂共同构成斜撑结构。
11.作为优选,清洗部包括两个清洗帚和用于驱动清洗帚转动的电机一,电机一的输出端通过轮带传动结构连接清洗帚。作为更优选,轮带传动结构包括连接在电机一输出端的带轮和皮带,皮带同时配合在带轮和清洗帚的带盘上,带轮上还设置有齿部,两个清洗帚的齿部相啮合,运行时,两个清洗帚的齿部相向转动以带动两个清洗帚相向旋转。
12.进一步地,所述壁面清洗机还包括全景摄像头,全景摄像头通过控制系统和无线通讯模块外接显示终端,并通过显示端实时显示清洗状况。
13.根据本发明的另一个实施例,调节机构包括立式布置的杆体和伸缩调节部,在杆体上套设有水平布置的伸缩臂,伸缩调节部上端连接伸缩臂,伸缩调节部下端连接在行走机器人上;调节过程中,通过伸缩调节部调节伸缩臂的高度,通过伸缩臂调节清洗部的水平位置。
14.一种如前所述壁面清洗机在池壁或槽壁清洗中的应用,可以用来清洗粪池壁、粪槽壁、沼气池壁、水泡粪壁或其它类似壁面的清洗。
15.有益效果:采用本发明壁面清洗机,不仅对人员要求低,而且能够提高清洗效率,降低人员劳动强度;采用本发明壁面清洗机清洗水泡粪池、化粪池、沼气池等池壁或槽壁,无需人员进入阴暗潮湿、环境恶劣、空气质量差的池内或槽内,能够避免有毒有害物质(气体、液体等)对操作人员造成伤害,尤其适用于清洗人体受限(人员不易进入/不能进入、不易操作)的粪池壁、粪槽壁、沼气池壁以及沟槽;本发明壁面清洗机稳定性好,操作方便,清洗效果好。
附图说明
16.图1为实施例1中壁面清洗机的主向示意图;图2为实施例1中壁面清洗机的俯向示意图;图3为实施例1中壁面清洗机的侧向示意图;图4为实施例2中壁面清洗机的主向示意图;图5为实施例3中壁面清洗机的主向示意图。
具体实施方式
17.下面将结合附图和实施例对本发明的技术方案进行清楚、完整地描述,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。在本发明的描述中,需要注意的是,术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或部件必须具有特定的方位、以特定的方位构造和操作,不能理解为对本发明的限制。
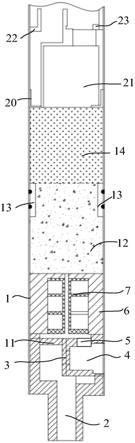
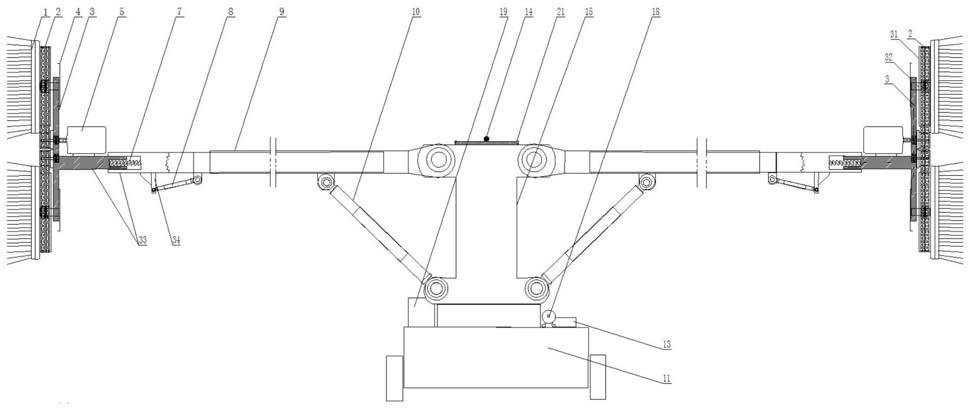
18.实施例1一种壁面清洗机,如图1、图2和图3所示,它包括行走机器人11、清洗部和控制系统,在
行走机器人11上设置有调节机构,清洗部连接调节机构,控制系统连接用于控制行走机器人11和调节机构按照设定程序动作,通过控制系统和调节机构对清洗部的方向和坐标进行调节;调节机构的动作方式包括水平伸缩调节和高度调节,通过水平伸缩调节改变清洗部的水平位置,通过高度调节改变清洗部的高度。其中,调节机构的动作方式还包括偏转调节,通过偏转调节将清洗部定位于同一立面的水平方向、竖直方向或者水平方向与竖直方向之间的任意方位。使用时,当清洗部的清洗帚偏转至与侧壁垂直并相接触时,能够实现对侧壁的清洗;当清洗部的清洗帚偏转至竖直向上并与顶壁接触时,能够实现对顶壁的清洗;当清洗部的清洗帚偏转至竖直向下并与底壁接触时,能够实现对底壁的清洗。
19.在本实施例中,清洗部的清洗帚1上配置有高压喷淋系统4,高压喷淋系统4的喷嘴正对清洗壁面,高压喷淋系统4通过设置在走机器人11上的泵12进行增压。高压喷淋系统4的水可以采用外供水源,也可以循环利用清洗池或清洗槽中的水。
20.本实施例中,调节机构包括立式布置的杆体15和斜向布置的伸缩调节部10,在杆体15上铰接设置有伸缩臂9,伸缩调节部10其中一端被固定,伸缩调节部10另一端铰接连接伸缩臂9;在伸缩调节部10外侧设置有帚位调节部8,帚位调节部8一端铰接连接伸缩臂9,帚位调节部8另一端铰接连接清洗部的安装件;调节过程中,通过伸缩调节部10调节伸缩臂9的高度和偏转方位,通过帚位调节部8调节清洗部的高度和偏转方位,通过伸缩臂9调节清洗部的水平位置。其中,伸缩臂9、帚位调节部8、伸缩调节部10的都可以直接采用气缸实现其伸缩功能,伸缩调节部10的伸缩杆斜向上布置,帚位调节部8的伸缩杆斜向下布置。
21.在本实施例中,如图1所示,以杆体15的轴线为对称中心线,伸缩调节部10、伸缩臂9、帚位调节部8、清洗部分别对称设置有两套,并由两个伸缩调节部10、杆体15和两个伸缩臂9共同构成斜撑结构。
22.在本实施例中,如图3所示,清洗部包括两个清洗帚1和用于驱动清洗帚1转动的电机一5,电机一5的输出端通过轮带传动结构连接清洗帚1,两个清洗帚1通过台壁3连接,台壁3上设置有连接杆31,连接杆31上设置有可转动的带盘32,清洗帚1固定带盘32上并能够随带盘32转动。轮带传动结构包括连接在电机一5输出端的带轮6和皮带2,皮带2同时配合在带轮6和清洗帚1的带盘32上,带轮6上还设置有齿部,两个清洗帚1的齿部相啮合,这样就能够通过一个电机一5驱动两个清洗帚1转动。
23.在本实施例中,台壁3通过横杆组件33铰接连接伸缩臂9,并在台壁3的横杆组件33上设置有减震器7,帚位调节部8的调节杆(伸缩杆)通过连杆34连接横杆组件33。
24.在本实施例中,壁面清洗机还包括全景摄像头14,全景摄像头14安装在杆体15顶部的盖板21上,全景摄像头14通过无线通讯模块外接显示终端,全景摄像头14采集到的图像经处理器处理后传输至显示终端,并通过显示端实时显示清洗状况。
25.在本实施例中,控制系统的主要部件安装在控制器19上,控制器19安装在行走机器人11上,控制系统的电控制箱12也安装在行走机器人11上。
26.使用时,将壁面清洗机放置在粪槽中,根据粪槽宽度(粪槽的两个壁面之间的宽度)调整伸缩臂9,使清洗帚1与粪槽的两个壁面相接触,电机一5和高压喷淋系统4启动后,电机一5通过轮带传动结构带动清洗帚1转动实现对壁面的刷洗,同时,高压喷淋系统4通过喷嘴往壁面喷水实现对壁面的冲洗,随着行走机器人11的移动,这样就能够将与清洗帚1接触的壁面清洗干净;当行走机器人11从粪槽头走到粪槽尾后,控制系统驱动伸缩调节部10
动作使伸缩臂9斜向上偏转,同时驱动帚位调节部8动作使清洗部斜向下偏转,直到清洗帚1与壁面相接触(该过程实质上是通过伸缩臂9上偏与清洗部下偏的相互配合来调节清洗帚1的高度,并确保清洗帚1处于竖直状态且与壁面相接触),随后,行走机器人11从粪槽尾走到粪槽头进行壁面清洗;每当同一高度的壁面清洗结束后,继续调节清洗帚1高度,直到粪槽清洗完毕后结束。整个清洗过程中,第一次阶段行走用于清洗高度为a至b米之间的壁面,第二次阶段行走用于清洗高度为b至c米之间的壁面,a至b、b至c米之间的高差基本等于两个清洗帚1的直径。
27.本实施例中的壁面清洗机不仅能够用于清洗顶部有挡板或者栅格板的粪池壁、粪槽壁、沼气池壁,而且能够用于清洗敞口(揭盖后)的粪池壁、粪槽壁、沼气池壁。
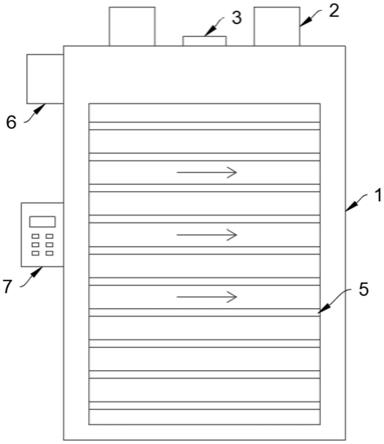
28.实施例2一种壁面清洗机,如图4所示,它包括行走机器人11、清洗部和控制系统,在行走机器人11上设置有调节机构,清洗部连接调节机构,控制系统连接用于控制行走机器人11和调节机构按照设定程序动作,通过控制系统和调节机构对清洗部的方向和坐标进行调节;调节机构的动作方式包括水平伸缩调节和高度调节,通过水平伸缩调节改变清洗部的水平位置,通过高度调节改变清洗部的高度。其中,调节机构的动作方式还包括偏转调节,通过偏转调节将清洗部定位于同一立面的水平方向、竖直方向或者水平方向与竖直方向之间的任意方位。
29.在本实施例中,清洗部的清洗帚1上配置有高压喷淋系统4,高压喷淋系统4的喷嘴正对清洗壁面,高压喷淋系统4通过设置在走机器人11上的泵12进行增压。高压喷淋系统4的水可以采用外供水源,也可以循环利用清洗池或清洗槽中的水。
30.本实施例中,调节机构包括立式布置的杆体15和伸缩调节部10,在杆体15上套设有水平布置的伸缩臂9,伸缩调节部10上端连接伸缩臂9,伸缩调节部10下端连接在行走机器人11上;调节过程中,通过伸缩调节部10调节伸缩臂9的高度,通过伸缩臂9调节清洗部的水平位置。其中,伸缩臂9、帚位调节部8、伸缩调节部10的都可以直接采用气缸实现其伸缩功能;杆体15高度不小于壁面高度。
31.在本实施例中,以杆体15的轴线为对称中心线,伸缩调节部10、伸缩臂9、帚位调节部8、清洗部分别对称设置有两套,并由两个伸缩调节部10、杆体15和两个伸缩臂9共同构成斜撑结构。
32.在本实施例中,清洗部和伸缩臂9的具体结构及其连接关系同实施例1。
33.在本实施例中,壁面清洗机还包括全景摄像头14,全景摄像头14安装在杆体15顶部的盖板21上,全景摄像头14通过无线通讯模块外接显示终端,全景摄像头14采集到的图像经处理器处理后传输至显示终端,并通过显示端实时显示清洗状况。
34.在本实施例中,控制系统的主要部件安装在控制器19上,控制器19安装在行走机器人11上,控制系统的电控制箱12也安装在行走机器人11上。
35.使用时,将壁面清洗机放置在粪池或者敞口粪槽中,根据粪池或者敞口粪槽宽度调整伸缩臂9,使清洗帚1与粪槽的两个壁面相接触,电机一5和高压喷淋系统4启动后,电机一5通过轮带传动结构带动清洗帚1转动实现对壁面的刷洗,同时,高压喷淋系统4通过喷嘴往壁面喷水实现对壁面的冲洗,随着行走机器人11的移动,这样就能够将与清洗帚1接触的壁面清洗干净;当行走机器人11从头侧走到尾侧后,控制系统驱动伸缩调节部10动作使伸
缩臂9向上提升,直到清洗帚1与未壁面相接触(该过程实质上是通过伸缩臂9向上伸长来调节清洗帚1的高度),随后,行走机器人11从尾侧走到头侧进行壁面清洗;每当同一高度的壁面清洗结束后,继续调节清洗帚1高度,直到粪池或者敞口粪槽清洗完毕后结束。
36.本实施例中的壁面清洗机主要用于清洗敞口(揭盖后)的粪池壁、粪槽壁、沼气池壁。
37.实施例3一种壁面清洗机,参照实施例1并结合图5所示,其与实施例1的区别在于:杆体15其中一侧设置调节机构和清洗部,杆体15另一侧设置可贴壁面行走的行走部,该行走部包括立式布置的轮臂22,轮臂22上下两端分别设置有轮座24,轮座24内侧连接在杆体15上,轮座24外侧设置有轮子23,清洗过程中,轮子23贴靠壁面(清洗壁面正对侧的壁面)行走。
38.本实施例中实质上相当于将实施例1中的一套调节机构和清洗部更换成行走部,主要适用于槽宽或池宽较小的情况,例如槽宽或池宽小于两个伸缩臂最短尺寸的情况,而轮子23贴靠壁面也能够提高清洗过程中的稳定性。
39.前述实施例中的壁面清洗机可以用来清洗粪池壁、粪槽壁、沼气池壁、水泡粪壁或拓展到其它类似壁面的清洗,尤其适用于清洗对人体受限的粪池壁、粪槽壁、沼气池壁以及沟槽,如操作人员不易进入、操作人员不能进入、操作人员不易操作甚至无法操作的粪池壁、粪槽壁、沼气池壁以及沟槽。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。