1.本发明属于环保智能机器人领域,更具体地说,特别涉及一种可变向追踪的城市管路清污智能机器人。
背景技术:
2.智能机器人是人工智能的产物,到了现在,已经有大量的智能机器人在工厂、餐厅、环卫、家庭内以及救援现场使用,利用智能机器人可以完成人工无法完成的工作,其中,在环境保护以及卫生治理领域,常见的有扫地机器人,可用于对家庭内地面进行清理。
3.例如申请号:cn201710328185.2本发明公开了一种单驱双向蠕行式管道清理机器人,包括前机体组件、传动组件和后机体组件;其中,所述传动组件由一个动力驱动,且通过连杆机构、齿轮机构和等休凸轮机构的传动作用,实现前机体组件和后机体组件沿径向的交替收缩与支撑,以及前机体组件和后机体组件之间的轴向伸缩,同时实现清淤刀盘的同步旋转,从而实现机器人沿管道正反双向的蠕动式行走以及管道清理作业。
4.基于上述专利的检索,以及结合现有技术中的结构发现,类似于上述专利中的用于市政环境治理的管道清洁机器人在对不同内径的管道进行清洁时,调节尺径的结构复杂,且需另外的驱动设备进行驱动前进,制造成本偏高,内部传动机构容易受到管壁内杂物影响,从而加剧磨损,提高机器人的损坏几率。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种可变向追踪的城市管路清污智能机器人,以解决类似于上述专利中的用于市政环境治理的管道清洁机器人在对不同内径的管道进行清洁时,调节尺径的结构复杂,且需另外的驱动设备进行驱动前进,制造成本偏高,内部传动机构容易受到管壁内杂物影响,从而加剧磨损,提高机器人的损坏几率的问题。
6.本发明一种可变向追踪的城市管路清污智能机器人的目的与功效,由以下具体技术手段所达成:一种可变向追踪的城市管路清污智能机器人,包括中柱主体;所述驱动件的右端固定连接在所述中柱主体的左端,且驱动件左端连接并驱动刮扫机构;所述定位支撑座设有四组,四组定位支撑座环绕中柱主体中心均匀分布在中柱主体外表面上;所述自扩轮架固定连接在定位支撑座的外端;所述吸尘器规定连接在中柱主体的右端,且吸尘器的罩体开口朝下,吸尘器罩体固定连接在下方的自扩轮架右端;所述清洁刷体固定连接在刮扫机构的自由伸缩架外端;所述同步滑块滑动连接在导向架上,所述同步滑块为截面呈t形结构的块体,且同步滑块包括有弹簧,弹簧固定连接在同步滑块的右表面,且弹簧的右端固定连接在导向架的右端,所述同步滑块还包括有同步连接框,同步连接框固定连接同组定位支撑座相邻的两处同步滑块;同步连接杆固定连接在相邻两处同步连接框上,且四组同步连接杆呈环形结构拼接连接四处同步连接框。
7.进一步的,所述刮扫机构包括有自由伸缩架,自由伸缩架设有三组,三组自由伸缩
架以刮扫机构为中心环绕分布在刮扫机构上,且自由伸缩架与刮扫机构表面铰接连接;拉簧连接在每组自由伸缩架两侧的架体中间。
8.进一步的,所述自由伸缩架设有三组,每组自由伸缩架设有两处架体,自由伸缩架还包括有伸缩内架,伸缩内架的外端铰接伸缩外架,伸缩外架的外端通过铰接连接清洁刷体的内表面。
9.进一步的,所述定位支撑座包括有导向架,导向架在每处定位支撑座上固定连接有两处,且导向架中间设有截面呈t形的导轨;伸缩筒固定连接在导向架的左端,且伸缩筒垂直于导向架设置。
10.进一步的,所述伸缩筒右侧面开设有导向槽,伸缩筒还包括有伸缩杆,伸缩杆滑动连接在伸缩筒内部,且伸缩杆的右侧通过铰接连接有同步连杆,并且同步连杆的另一端铰接在同步滑块上。
11.进一步的,所述清洁刷体包括有前刷端头,前刷端头呈弧形面结构,且前刷端头弧面朝向左侧外侧;后轮槽开设在清洁刷体的右侧,且后轮槽呈十度倾斜开设;斜向轮通过轴承转动连接在后轮槽内,且斜向轮同样呈十度倾斜设置;所述斜向轮包括有轮面凸纹,轮面凸纹设有两处,轮面凸纹为截面呈三角形的凸纹。
12.进一步的,所述自扩轮架包括有支撑轮,支撑轮设有两处,两处支撑轮分别通过轴承转动连接在自扩轮架的两端。
13.与现有技术相比,本发明具有如下有益效果:1、通过本结构的自扩轮架和同步滑块的配合,将此智能机器人放置在管道入口处,清洁刷体的方向朝向管道的内部,吸尘器位于开口外侧方向,当清洁刷体进入管道内时,自扩轮架呈扩张状态,对同步连接杆向右侧移动,即可使同步滑块向右滑动,带动伸缩杆下移,使自扩轮架收缩,自扩轮架进入管道内部后,在弹簧对同步滑块的顶紧作用和同步连杆铰接作用下,使伸缩杆在伸缩筒上外移,实现自扩轮架的自动扩张,在同步连接杆与同步连接框的作用下使四处自扩轮架扩张相等的距离,并通过自扩轮架与八处支撑轮的作用保持清洁机器人支撑以及移动的平稳性,从而保持中柱主体与刮扫机构位于管道中间,使刮扫机构带动清洁刷体转动时,三组自由伸缩架伸展长度相等,时三处清洁刷体在移动时均能更好的与管道内壁紧密贴合,避免刮扫机构旋转时出现晃动,防止对管道内壁的清洁遗漏,保证清洁效率。
14.2、通过本结构的刮扫机构和清洁刷体的配合,常态下,同组的两处自由伸缩架在拉簧作用下靠近,使清洁刷体向刮扫机构轴线的方向向里收缩,自动折叠,具有良好的收纳性能,启动驱动件,控制驱动件向左视逆时针方向转动,通过驱动件带动刮扫机构转动,刮扫机构通过自由伸缩架连接清洁刷体,而在刮扫机构转动时,带动清洁刷体转动,产生离心力,在离心力作用下使清洁刷体向刮扫机构的径向方向向外移动, 同组的两处自由伸缩架脱离拉簧的拉力而互相远离,延长刮扫机构与清洁刷体之间的间距,从而使清洁刷体接触管体的内壁,通过刷毛对管体的内壁进行清刷,停止清刷后,在拉簧作用下使两处自由伸缩架靠近,清洁刷体向刮扫机构轴线的方向向里收缩,自动折叠。
15.3、通过本结构的清洁刷体和斜向轮的配合,在转动过程中,斜向轮同样接触管道内壁表面,由于斜向轮的倾斜角度原因,当刮扫机构进行左向逆时针方向转动时,清洁刷体在管道内壁表面刮动,斜向轮与管道内壁同样接触并在管道内壁上滚动,由于斜向轮倾斜
的结构,可带动清洁刷体在管道内部转动的同时向斜向轮轮体倾斜的一侧移动,因此可带动清洁刷体向左移动,弧形结构的前刷端头可降低清洁刷体在左移过程中卡住的几率,在机器人无需加设移动牵引机构的情况下进行移动,降低了机器人的重量,节省了机器人工作时的负荷,大大的延长了机器人的续航时间。
16.4、通过本结构的自扩轮架和吸尘器的配合,中柱主体后端设有现有技术的微型吸尘器,用于对清扫掉落的杂物进行收集,吸尘器的吸尘罩连接在下方的自扩轮架右端,使吸尘器始终与内壁保持相近的距离,吸尘工作更稳定,由此可见,在不外设机器人的移动驱动机构的情况下仍然可带动机器人朝向管道左方进行移动,减轻了机器人的制造成本和重量负担。
附图说明
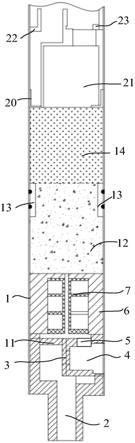
17.图1是本发明的结构示意图。
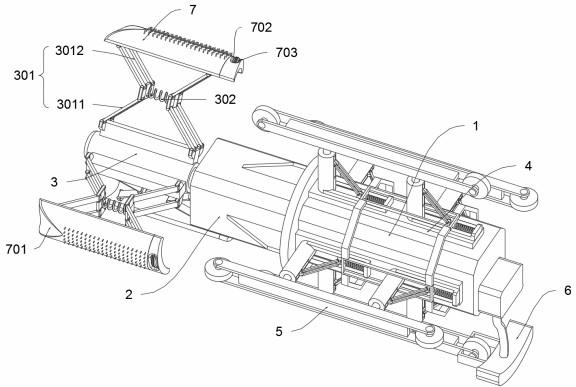
18.图2是本发明刮扫机构的主视结构示意图。
19.图3是本发明导向架的结构示意图。
20.图4是本发明图1的俯视结构示意图。
21.图5是本发明定位支撑座的结构示意图。
22.图6是本发明同步滑块的结构示意图。
23.图7是本发明图1的右视结构示意图。
24.图8是本发明图2的a处局部放大结构示意图。
25.图9是本发明图6的b处局部放大结构示意图。
26.图10是本发明图7的c处局部放大结构示意图。
27.图中,部件名称与附图编号的对应关系为:1、中柱主体;2、驱动件;3、刮扫机构;301、自由伸缩架;3011、伸缩内架;3012、伸缩外架;302、拉簧;4、定位支撑座;401、导向架;402、伸缩筒;4021、伸缩杆;4022、同步连杆;5、自扩轮架;501、支撑轮;6、吸尘器;7、清洁刷体;701、前刷端头;702、后轮槽;703、斜向轮;7031、轮面凸纹;8、同步滑块;801、弹簧;802、同步连接框;803、同步连接杆。
具体实施方式
28.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
29.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的
普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
31.实施例一:如附图1至附图10所示:本发明提供一种可变向追踪的城市管路清污智能机器人,包括中柱主体1,中柱主体1内部设有蓄电池,蓄电池连接驱动件2,可用于实现对机器人的电能供应;驱动件2的右端固定连接在中柱主体1的左端,且驱动件2左端连接并驱动刮扫机构3,刮扫机构3包括有自由伸缩架301;定位支撑座4设有四组,四组定位支撑座4环绕中柱主体1中心均匀分布在中柱主体1外表面上,定位支撑座4包括有导向架401;自扩轮架5固定连接在定位支撑座4的外端,自扩轮架5包括有支撑轮501,支撑轮501设有两处,两处支撑轮501分别通过轴承转动连接在自扩轮架5的两端;吸尘器6规定连接在中柱主体1的右端,且吸尘器6的罩体开口朝下,吸尘器6罩体固定连接在下方的自扩轮架5右端;清洁刷体7固定连接在刮扫机构3的自由伸缩架301外端;同步滑块8滑动连接在导向架401上。
32.结合附图2所示,自由伸缩架301设有三组,三组自由伸缩架301以刮扫机构3为中心环绕分布在刮扫机构3上,且自由伸缩架301与刮扫机构3表面铰接连接,每组自由伸缩架301设有两处架体,自由伸缩架301还包括有伸缩内架3011,伸缩内架3011的外端铰接伸缩外架3012,伸缩外架3012的外端通过铰接连接清洁刷体7的内表面;拉簧302连接在每组自由伸缩架301两侧的架体中间,刮扫机构3通过自由伸缩架301连接清洁刷体7,常态下,同组的两处自由伸缩架301在拉簧302作用下靠近,使清洁刷体7向刮扫机构3轴线的方向向里收缩,自动折叠,具有良好的收纳性能,而在刮扫机构3转动时,带动清洁刷体7转动,产生离心力,在离心力作用下使清洁刷体7向刮扫机构3的径向方向移动,实现自动展开,紧密接触管体的内壁,通过刷毛对管体的内壁进行清刷。
33.其中,导向架401在每处定位支撑座4上固定连接有两处,且导向架401中间设有截面呈t形的导轨;伸缩筒402固定连接在导向架401的左端,且伸缩筒402垂直于导向架401设置;伸缩筒402右侧面开设有导向槽,伸缩筒402还包括有伸缩杆4021,伸缩杆4021滑动连接在伸缩筒402内部,且伸缩杆4021的右侧通过铰接连接有同步连杆4022,并且同步连杆4022的另一端铰接在同步滑块8上,此结构的导向架401与伸缩筒402如附图5所示,自扩轮架5进入管道内部后,在弹簧801对同步滑块8的顶紧作用和同步连杆4022铰接作用下,使伸缩杆4021在伸缩筒402上外移,实现自扩轮架5的自动扩张。
34.结合附图1所示,清洁刷体7包括有前刷端头701,前刷端头701呈弧形面结构,且前刷端头701弧面朝向左侧外侧,弧形结构的前刷端头701可降低清洁刷体7在左移过程中卡住的几率;后轮槽702开设在清洁刷体7的右侧,且后轮槽702呈十度倾斜开设;斜向轮703通过轴承转动连接在后轮槽702内,在刮扫机构3转动时,带动清洁刷体7转动,产生离心力,在离心力作用下使清洁刷体7向刮扫机构3的径向方向移动,从而接触管体的内壁,通过刷毛对管体的内壁进行清刷。
35.其中,同步滑块8为截面呈t形结构的块体,且同步滑块8包括有弹簧801,弹簧801固定连接在同步滑块8的右表面,且弹簧801的右端固定连接在导向架401的右端,此结构的同步滑块8如图3所示,当清洁刷体7进入管道内时,自扩轮架5呈扩张状态,对同步连接杆803向右侧移动,即可使同步滑块8向右滑动,带动伸缩杆4021下移,使自扩轮架5收缩,自扩轮架5进入管道内部后,在弹簧801对同步滑块8的顶紧作用和同步连杆4022铰接作用下,使
伸缩杆4021在伸缩筒402上外移,实现自扩轮架5的自动扩张,从而通过自扩轮架5与八处支撑轮501的作用保持清洁机器人支撑以及移动的平稳性。
36.实施例二:基于第一实施例提供的一种可变向追踪的城市管路清污智能机器人,该装置的自扩轮架5自动扩张后,对于四处自扩轮架5需要保证扩张相同的距离,从而保持中柱主体1与刮扫机构3位于管道中间;为解决以上问题,结合图6,该一种可变向追踪的城市管路清污智能机器人还包括:同步连接框802固定连接同组定位支撑座4相邻的两处同步滑块8;同步连接杆803固定连接在相邻两处同步连接框802上,且四组同步连接杆803呈环形结构拼接连接四处同步连接框802;即对四处自扩轮架5扩张不同步,支撑不稳固的情况做出相对应的解决方案,在同步连接杆803与同步连接框802的作用下使四处自扩轮架5扩张相等的距离,从而保持中柱主体1与刮扫机构3位于管道中间轴线位置,使中柱主体1与刮扫机构3始终保持同轴,并通过自扩轮架5与八处支撑轮501的作用保持清洁机器人支撑以及移动的平稳性。
37.实施例三:基于第一实施例提供的一种可变向追踪的城市管路清污智能机器人,该装置的刮扫机构3带动清洁刷体7进行转动时,具有清扫功能的同时,在清洁刷体7的基础上添加斜向轮703的结构,结合附图7,斜向轮703同样呈十度倾斜设置,斜向轮703包括有轮面凸纹7031,轮面凸纹7031设有两处,轮面凸纹7031为截面呈三角形的凸纹;在转动过程中,斜向轮703同样接触管道内壁表面,由于斜向轮703的倾斜角度原因,当清洁刷体7进行左向逆时针方向转动时,斜向轮703在管道内壁表面滚动过程中可带动清洁刷体7向左移动,在机器人无需加设移动牵引机构的情况下进行移动,降低了机器人的重量,节省了机器人工作时的负荷,大大的延长了机器人的续航时间。
38.使用时:首先,在城市环境治理过程中,对圆柱结构的管体进行内壁清洁时,具有曲折结构的管道以及长度较长的管道无法使用人工进行清理时,将此智能机器人放置在管道入口处,清洁刷体7的方向朝向管道的内部,吸尘器6位于开口外侧方向,当清洁刷体7进入管道内时,自扩轮架5呈扩张状态,对同步连接杆803向右侧移动,即可使同步滑块8向右滑动,带动伸缩杆4021下移,使自扩轮架5收缩,自扩轮架5进入管道内部后,在弹簧801对同步滑块8的顶紧作用和同步连杆4022铰接作用下,使伸缩杆4021在伸缩筒402上外移,实现自扩轮架5的自动扩张,在同步连接杆803与同步连接框802的作用下使四处自扩轮架5扩张相等的距离,从而保持中柱主体1与刮扫机构3位于管道中间,并通过自扩轮架5与八处支撑轮501的作用保持清洁机器人支撑以及移动的平稳性;启动驱动件2,使驱动件2向左视逆时针方向转动,通过驱动件2带动刮扫机构3转动,刮扫机构3通过自由伸缩架301连接清洁刷体7,同组的两处自由伸缩架301在拉簧302作用下靠近,使清洁刷体7内收,而在刮扫机构3转动时,带动清洁刷体7转动,产生离心力,在离心力作用下使清洁刷体7向刮扫机构3的径向方向移动,从而接触管体的内壁,通过刷毛对管体的内壁进行清刷,在转动过程中,斜向轮703同样接触管道内壁表面,由于斜向轮703的倾斜角度原因,当清洁刷体7进行左向逆时针方向转动时,斜向轮703在管道内壁表面滚动过程中可带动清洁刷体7向左移动,弧形结构的前刷端头701可降低清洁刷体7在左移过程中卡住的几率,并且中柱主体1后端设有现有技术的微型吸尘器6,用于对清扫掉落的杂物进行收集,吸尘器6的吸尘罩连接在下方的自扩轮架5右端,便于始终与内壁保持相近的距离,由此可见,在不外设机器人的移动驱动机构的情况下仍然可带动机器人朝向管道左方进行移动,减轻了机器人的制造成本和重量
负担。
39.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。