1.本实用新型涉及一种除尘设备,特别是一种自动化除尘设备。
背景技术:
2.在除尘作业中,自动化除尘设备往往无法对物体的多个面同时进行除尘操作,特别是当被除尘物体上下截面的轮廓尺寸存在一定差异或因加工、使用等原因导致不同个体在外观尺寸上存在一定差异时。目前的解决方案主要有两种,一种是将外观尺寸差异较大的个体挑出来,采用手持除尘设备,通过人工手持的方式来适应被除尘物体的表面差异,但实际作业时,特别是对多个面同时进行除尘作业时,往往需要多套设备,较多人力,因而成本较高且效率较低。另一种方案是增加除尘机构上刷毛的长度或调大除尘机构与被除尘物体之间的距离,但如果采取这样的技术方案,在对尺寸较小的个体或个体的某个局部除尘时,刮除力较弱,除尘效果较差,而且,当装配吸尘口除尘时,会使吸尘口距离接触位置较远,除尘效果较差。
技术实现要素:
3.为了克服现有技术无法对物体多个面同时进行除尘操作,特别是当被除尘物体上下截面的轮廓尺寸存在一定差异或因加工、使用等原因导致不同个体在外观尺寸上存在一定差异时,对物体多个面同时除尘成本较高、效率较低、效果较差的问题,本实用新型提供一种柔性自动化立体除尘设备,主要由移动机构、除尘机构、电控系统组成,通过按照被除尘物体的投影轮廓线进行构建的除尘机构,以及除尘机构和除尘部件在除尘过程中的移动,较低成本、较为高效、效果较好地实现对外观存在一定差异的物体的多个面同时除尘。
4.本实用新型解决其技术问题所采用的技术方案是:一种柔性自动化立体除尘设备,主要由移动机构、除尘机构、电控系统组成,移动机构连接除尘机构、电控系统连接移动机构并控制移动机构带动除尘机构移动,除尘机构按照被除尘物体的投影轮廓线进行构建,除尘机构主要由运动模块、第一控制电路和除尘部件组成,第一控制电路连接运动模块,运动模块连接除尘部件,运行时,通过除尘机构和除尘部件的移动,实现对被除尘物体的多个面同时除尘。
5.上述柔性自动化立体除尘设备,所述除尘机构按照被除尘物体内侧的投影轮廓线进行构建,运行时,通过除尘机构和除尘部件的移动,实现对被除尘物体内侧的多个面同时除尘。
6.上述柔性自动化立体除尘设备,所述除尘机构按照被除尘物体的外轮廓投影轮廓线和内侧投影轮廓线进行构建,运行时,通过除尘机构和除尘部件的移动,实现对被除尘物体的外侧和内侧的多个面同时除尘。
7.上述柔性自动化立体除尘设备,所述除尘机构装有传感器,传感器连接第一控制电路,在运行时,第一控制电路根据传感器传递的信号调整运动模块的运动,从而调整除尘部件的运动。
8.上述柔性自动化立体除尘设备,所述传感器为压力传感器、压力计、位移传感器或光学传感器。
9.上述柔性自动化立体除尘设备,所述除尘机构中的除尘部件包括电动除尘部件,电动除尘部件连接有第二控制电路。
10.上述柔性自动化立体除尘设备,所述除尘部件主要由电动刷、吸尘罩、风管、过滤器和风机组成,运动模块连接吸尘罩、吸尘罩连接电动刷和风管、风管连接过滤器、过滤器连接风机。
11.上述柔性自动化立体除尘设备,所述移动机构或运动模块主要由链条链轮结构、齿轮齿条结构、滚珠丝杠结构、直线模组、电动推杆、齿轮组、皮带皮带轮组、液压缸、气缸、电缸或电液缸组成。
12.上述柔性自动化立体除尘设备,所述电控系统主要由控制器或处理器和外部电路组成,控制器或处理器连接外部电路,外部电路连接移动机构。
13.上述柔性自动化立体除尘设备,所述柔性自动化立体除尘设备还包括传送装置,传送装置传送被除尘物体。
14.上述柔性自动化立体除尘设备,所述传送装置为传送带、滚筒输送线、吊装输送线、电磁轨道或agv小车(自动引导小车)。
15.上述柔性自动化立体除尘设备,在除尘机构给被除尘物体除尘的地方装有定位装置或抱夹装置,用于被除尘物体的固定。
16.上述柔性自动化立体除尘设备,除尘机构给被除尘物体除尘的地方罩于壳体内,壳体装有电动门,在被除尘物体移动到除尘的地方的路径上装有到位传感器,在被除尘物体除尘的地方装有定位传感器,电动门、到位传感器和定位传感器有第三控制电路或由除尘设备的电控系统连接。
17.上述柔性自动化立体除尘设备,所述除尘机构装有传感器,传感器连接第一控制电路,所述除尘机构中的除尘部件包括电动除尘部件,电动除尘部件连接有第二控制电路,除尘机构给被除尘物体除尘的地方罩于壳体内,壳体装有电动门,在被除尘物体移动到除尘的地方的路径上装有到位传感器,在被除尘物体除尘的地方装有定位传感器,电动门、到位传感器和定位传感器连接有第三控制电路,所述柔性自动化立体除尘设备配有传送装置和控制回路,控制回路连接传送装置,传送装置传送被除尘物体,第一控制电路、第二控制电路、第三控制电路、控制回路和除尘设备的电控系统连接成为统一的控制系统。
18.本实用新型的有益效果是:本实用新型提供的柔性自动化立体除尘设备能够较低成本、较为高效、效果较好地对物体多个面同时进行除尘操作,特别是对外观存在一定差异的物体的多个面同时进行除尘操作。
附图说明
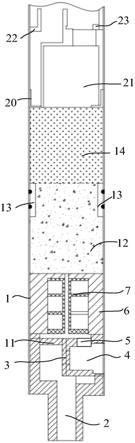
19.图1为本实用新型主要内部结构的示意图;
20.图2为本实用新型的除尘机构主要结构示意图;
21.图3为本实用新型的外部示意图;
22.图4为本实用新型除尘机构的构造原理示意图;
23.图5为本实用新型整体控制部分的示意图。
24.图中:1.支撑组件,2.移动机构,3.除尘机构,4.电控系统,5.壳体,6.定位装置,7.被除尘物体,8.到位传感器,9.定位传感器,10.agv小车(自动引导小车),11.被除尘物体的外轮廓投影轮廓线,12.运动模块,13.第一控制电路,14.除尘部件,15.压力传感器,16.电动刷,17.吸尘罩,18.风管,19.过滤器,20.风机,21.电动门,22.第二控制电路,23.控制系统,24.第三控制电路,25.控制回路。
具体实施方式
25.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型且只是本实用新型的一部分实施例,并非用于限定本实用新型的范围,也并非本实用新型的全部实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的其他实施例,都属于本实用新型保护的范围。
26.【实施例1】
27.如图1所示,支撑组件1连接移动机构2、移动机构2连接除尘机构3、电控系统4连接移动机构2并控制移动机构2带动除尘机构3移动,电控系统4主要由plc和外部电路组成,移动机构2主要由滚珠丝杠结构组成。除尘机构3按照被除尘物体7的投影轮廓线进行构建,除尘机构3主要由运动模块12、第一控制电路13和除尘部件14组成,第一控制电路13连接运动模块12,运动模块12连接除尘部件14,运行时,通过除尘机构3和除尘部件14的移动,实现对被除尘物体7的多个面同时除尘。
28.【实施例2】
29.如图2所示,除尘机构主要由运动模块12,第一控制电路13和除尘部件14组成,第一控制电路13连接运动模块12,运动模块12连接除尘部件14,运行时,通过除尘机构和除尘部件14的移动,实现对被除尘物体的多个面同时除尘。除尘机构还装有压力传感器15,压力传感器15连接第一控制电路13,运行时,首先设定压力传感器15在正常状态下的值域,在除尘操作中,压力传感器15将测得的压力值传递给第一控制电路13,如果压力传感器15的测得压力值小于正常状态下的值域,则第一控制电路13控制运动模块12带动除尘部件14靠近被除尘物体,直到压力传感器15的测得压力值进入正常除尘操作的值域,如果压力传感器15的测得压力值大于正常状态下的值域,则第一控制电路13控制运动模块12带动除尘部件14远离被除尘物体,直到压力传感器15的测得压力值进入正常除尘操作的值域。除尘部件14主要由电动刷16、吸尘罩17、风管18、过滤器19、风机20组成,运动模块12连接吸尘罩17,吸尘罩17连接电动刷16,吸尘罩17还连接风管18,风管18连接过滤器19,过滤器19连接风机20。
30.【实施例3】
31.如图3所示,除尘机构给被除尘物体7除尘的地方罩于壳体5内,壳体5装有电动门21,在被除尘物体7移动到除尘的地方的路径上装有到位传感器8,在被除尘物体7除尘的地方装有定位传感器9和定位装置6,柔性自动化立体除尘设备还包括传送装置agv小车(自动引导小车)10,用于传送被除尘物体7。
32.【实施例4】
33.如图4所示,被除尘物体7的外轮廓投影轮廓线11为矩形,柔性自动化立体除尘设备的除尘机构按照上述矩形的轮廓尺寸进行构建,也就是除尘机构中的电动刷16能够在正
常除尘操作时,在移动机构带动除尘机构的移动的过程中,能够对被除尘物体7外侧的多个面进行同时除尘。
34.【实施例5】
35.如图1、2、3、4、5所示,柔性自动化立体除尘设备的除尘机构3装有压力传感器15,压力传感器15连接第一控制电路13,所述除尘机构3中的除尘部件包括电动除尘部件——电动刷16,电动刷16连接第二控制电路22,除尘机构3给被除尘物体7除尘的地方罩于壳体5内,壳体5装有电动门21,在被除尘物体7移动到除尘的地方的路径上装有到位传感器8,在被除尘物体7除尘的地方装有定位装置6和定位传感器9,电动门21、到位传感器8和定位传感器9连接第三控制电路24,所述柔性自动化立体除尘设备还包括传送装置agv小车(自动引导小车)10和控制回路25,控制回路25连接agv小车(自动引导小车)10,agv小车(自动引导小车)10传送被除尘物体7,第一控制电路13、第二控制电路22、第三控制电路24、控制回路25和电控系统4连接成为统一的控制系统23,也就是说,所有的传感器和执行器都接入广义上的控制器或处理器,具体通过那一条连接路径可以等效替代。
36.运行时,agv小车(自动引导小车)10传送被除尘物体7前往除尘的地方,首先触发到位传感器8,到位传感器8将信号经第三控制电路24传递给控制系统23,控制系统23将开门指令经第三控制电路24传递给电动门21,电动门21打开,agv小车(自动引导小车)10传送被除尘物体7进入电动门21,之后触发定位传感器9,定位传感器9将信号经第三控制电路24传递给控制系统23,控制系统23将放置指令经控制回路25传递给agv小车(自动引导小车)10,agv小车(自动引导小车)10将被除尘物体7传送到定位装置6上。之后agv小车(自动引导小车)10退到电动门21外,并触发到位传感器8,到位传感器8将信号经第三控制电路24传递给控制系统23,控制系统23将关门指令经第三控制电路传递给电动门21,电动门21关闭,同时,控制系统23通过电控系统4控制移动机构2带动除尘机构3移动,通过第一控制电路13控制运动模块12带动除尘部件14运动,第二控制电路22启动电动刷16,从而对被除尘物体7外侧的多个面进行同时除尘。在除尘操作中,压力传感器15将测得的压力值传递给第一控制电路13,如果压力传感器15的测得压力值小于正常状态下的值域,则第一控制电路13控制运动模块12带动除尘部件14靠近被除尘物体7,直到压力传感器15的测得压力值进入正常除尘操作的值域,如果压力传感器15的测得压力值大于正常状态下的值域,则第一控制电路13控制运动模块12带动除尘部件14远离被除尘物体7,直到压力传感器15的测得压力值进入正常除尘操作的值域。除尘结束后,控制系统23通过第三控制电路24打开电动门21,并通过控制回路25控制agv小车(自动引导小车)10进入电动门21前往除尘的地方,直到触发定位传感器9,定位传感器9将信号经第三控制电路24传递给控制系统23,控制系统23将取下指令经控制回路25传递给agv小车(自动引导小车)10,agv小车(自动引导小车)10将被除尘物体7从定位装置6上脱离后传送除尘的物体7离开除尘的地方。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。