1.本发明涉及自然能源利用领域,特别涉及一种静态液体中利用压强差自动连续转动的装置。
背景技术:
2.目前,在工程领域利用液体促动机械动作的设施为数不多,常见的有水力发电,潮汐发电,传统水车传输,液力传动设备,吊车设备,千斤顶等等,上述的应用基本是利用液体流动的动能而转换成机械能,且要消耗持续不断的动能;或者仅是借助液体的特性作中介传输作用而已。
3.在舰艇方面,静态中的液体功用单一,只剩重量压载之用。
4.静态液体中利用压强差来获得动能是一种可行的技术,是可以通过设计机械装置来加以利用的,比如用于发电。然而,现有技术中并没有相关技术述及利用液体压强差转化动能的应用,也没有技术实现将静态水资源转换成自然持久,成本低廉的电力能源。
5.因此,在利用静态液体资源转换机械能应用方面,目前来讲实属凤毛麟角,亟需一种应用于静态液体中利用压强差来产生动能的装置,实现将静态水资源转换成自然持久,成本低廉的电力能源。
技术实现要素:
6.本发明的目的是:针对上述没有相关技术述及利用液体压强差转化动能的应用,也没有技术实现将静态水资源转换成自然持久,成本低廉的电力能源的缺陷补充,而本发明提供一种静态液体中利用压强差自动连续转动的装置,主要涉及普通水资源利用,将成为开拓静态水资源利用的新亮点。只需将其转动输出端连接发电机或抽水机或其它机械设备,便成为零消耗的动力源(维修保养除外),其适用性广普,只要有水的地方如山塘、水库、湖泊、镜面海湾、人造水池等均可设置。
7.本发明的技术解决方案是:构造一种静态液体中利用压强差自动连续转动的装置,装置整体是潜体悬浮于液体中,转轮架上设置若干轴承座及支杆,受压半球仓为潜体对应安装在所述轴承座上,导向部为潜体与所述支杆连接;连杆刚性连接转动输出部及所述支杆;所述受压半球仓设置止位块及弧形凹槽,所述止位块及所述弧形凹槽配合所述导向部限制所述受压半球仓单一方向旋转;压力迫使所述受压半球仓推动所述转轮架转动并通过所述转动输出部输出。
8.优选地,所述导向部包括导向臂、臂座及轴球,所述导向臂为沉体重量,所述轴球为浮体重量;所述臂座安装在所述支杆上,所述导向臂的一端与所述臂座挠性连接,另一端连接所述轴球;其中,所述导向臂与所述臂座连接的一端对称设置限位角度块,所述角度块配合所述臂座限制所述导向臂在其轴线方向上左右摆动的角度值。
9.优选地,所述角度值为左右各25度。
10.优选地,所述受压半球仓为半球体,两侧对称设置凸转轴与所述轴承座配合安装,
所述凸转轴的轴线p穿过所述受压半球仓的浮心d;所述受压半球仓为潜体的重量,等于该物体在其工况液体自由表面完全淹没成潜体状态时的重量。
11.优选地,所述受压半球仓为密封体,内部设置若干均为圆环形的球体管道,所述球体管道内放置平衡球,所述平衡球为沉体重量,在所述受压半球仓的半球切面上分别对应设置通孔连通所述球体管道并配置柱塞密封。
12.优选地,所述转动输出部为齿轮传动,通过齿轮与输出轴啮合将动力输出,所述齿轮与所述支杆钢性连接。
13.与现有技术相比,本发明的有益效果:本发明的装置整体悬浮于水中,通过设置受压半球仓及导向部,利用压强差所产生的作用力迫使转轮架循环转动而产生动能,转轮架通过连接转动输出部持续地将动能输出利用,也可以连接相关发电设备实现输出电力利用,实现了将静态水资源转换成自然持久,成本低廉的电力能源。在运行工况中,无需外加操纵与干预,真正自动自控,是名符其实的零消耗零排放,符合无炭、自然、生态、环保、可持续发展等标签条件。
附图说明
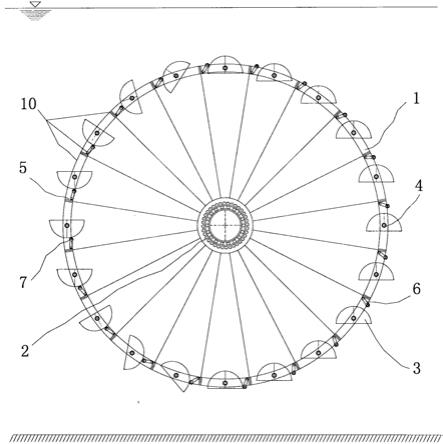
14.图1是本发明装置的第一实施例的整体示意图;
15.图2是本发明装置的第一实施例的对照示意图;
16.图3是本发明的受压半球仓的三视角示意图;
17.图4是本发明的受压半球仓的内部结构示意图;
18.图5是半球体静液受压示意图;
19.图6是本发明的受压半球仓在液体中的受压示意图;
20.图7是本发明的导向部结构示意图;
21.图8是本发明第一实施例的表盘概念示意图;
22.图9是本发明的表盘概念d1
‑
d10及d20的位置状态示意图;
23.图10是本发明的表盘概念d11
‑
d13位置的状态示意图;
24.图11是本发明的表盘概念d14
‑
d16位置的状态示意图;
25.图12是本发明的表盘概念d17
‑
d19位置的状态示意图;
26.图13是实施本发明装置的第二实施例的整体示意图。
27.主要组件符号说明:1、转轮架,2、齿轮,3、受压半球仓,4、轴承座,5、臂座,6、导向臂,7、轴球,8、支杆,9、连杆,10、从动旋转单元,30、凸转轴,31、切面圆,32、柱塞,33、通孔,34、球体管道,35、平衡球,32l、柱塞l,32r、柱塞r,33l、通孔l,33r、通孔r,34l、球体管道l,34r、球体管道r,35l、平衡球l,35r、平衡球35r,36、止位块,37、弧形凹槽。
具体实施方式
28.本发明下面将结合附图作进一步详述:
29.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易被本领域人员理解,从而对本发明的保护范围做出更为清楚明确的界定。本发明所提到的方向用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「顶」、「底」等,仅是参考附加图式的方向。因此,使用的方向用语是用以说明及理解本发明,而非用以限制本发明。
30.为便于说明和理解,引用以下水静力学相关术语:
31.如果g<ρg v时,物体将会上浮,直到排开的液体重量和自重相等,这样的物体称为浮体。
32.如果g>ρg v时,物体将会下沉,直至沉到底部才会停止下来,这样的物体称为沉体。
33.如果g=ρg v时,物体可以潜没于水中的任何位置而保持平衡,这样的物体称为潜体。
34.式中g为物体自重,ρ物为液体比重,g为重力加速度,v为物体体积。
35.潜体平衡的稳定条件:是要使重心位于浮心之下;
36.重心和浮心位于同一条铅垂线上。
37.请参阅图1、图2所示,本发明静态液体中利用压强差自动连续转动装置,由转轮架1、输出齿轮2、受压半球仓3及连杆9组成。在转轮架1上通过连杆9刚性连接输出齿轮2,转轮架1上均匀设置多个左右对称的轴承座4。转轮架1为两个圆形物件,通过均匀对应设置的支杆8将两个圆形物件连接成转轮架1。支杆8上设有导向部,导向部由臂座5、导向臂6与轴球7依次连接而构成。转动输出部由输出齿轮2及连杆9组成,从动旋转单元10是由除半球仓外其他部件所组成。转轮架1外侧等距设有多个可作 360
°
旋转的同模受压半球仓3安装在轴承座4上,并且从动旋转单元10 以及单个受压半球仓3各自物件自重,等于该物体在其工况液体自由表面完全淹没成潜体状态时的重量。
38.作为本发明的关键和特征点:即组成装置的各自单元物件,其先决条件既不是浮体,也不是沉体,而必须是潜体。而潜体状态局限在其工况液体自由表面完全淹没时,换言之单元物件重量标准为:刚好淹没在实地工况液体表面时且保持平衡的自重。
39.以上之关键要素,也是本装置对应在不同安装地点的不同海拔高度(大气压强不同),以及不同液体比重(如清澈水、混浊水、矿物水、海水、其它液体),所要匹配的技术特征。
40.请参阅图3、图4所示,受压半球仓3为正半球密封体,边缘两侧设有两凸转轴30,且轴线穿过半球体浮心d;在切面圆31中心垂径线上,设有圆环形球体管道34,以及位于左右的小圆环形球体管道34l和34r,圆环形球体管道34、34l、34r平面与两凸转轴30轴线互为90度,且各自管道上方均有通孔33、33l、33r连通切面圆31,通孔中配有螺纹柱塞32、32l、 32r。
41.圆环形球体管道34、34l、34r中配置有重量平衡球35、35l、35r,且各自平衡球为沉体重量。
42.在与两凸转轴30轴线中点互为90度外延的受压半球仓3外曲面一侧设有一止位块36;在与两凸转轴30轴线互为90度的半球外曲面底部至另一侧,设有一弧形凹槽37。
43.在图4中,在受压半球仓3密封体内,嵌入圆环形球体管道34、34l、 34r模块,其模块平面与两凸转轴30轴线互为90度,是引导半球仓3自动翻转的轨道;而在轨道中滑行畅顺的重量平衡球35兼具两项功能:一是配置不同比重的重量平衡球,以适应受压半球仓3整体单元重量满足前述之
‘
在其工况液体自由表面完全淹没成潜体状态时的重量’;二是,通过重量平衡球35、35l、35r在圆环形球体管道34、34l、34r不同位置,移动受压半球仓3潜体重心c产生力偶,促使受压半球仓3潜体在转轮架1每圆周循环过程中,从属稳定平衡状态。
44.本发明的特征点是将受压仓3设计为正半球体,这是在众多几何体中特定选项,其在静态液体中的受压力状况请参阅图5所示:〖首先计算水平分力fpx和fpy,选定空间座标系ox、oy、和oz轴,xoy平面与液面重合。今以平行于ox轴的直线与物体表面相切,其切点构成一根封闭曲线abdc,曲线abdc将物体表面分成左右两半,作用于物体表面静水总压力的水平分力fpx,应为左半部表面上的水平分力fpx1,和右半部表面上水平分力fpx2 之和。然而不难看出,左右两半边表面在yoz平面上的投影面积ax相等,在液面以下淹没深度相同,因而fpx1和fpx2大小相等,方向相反,合成后在ox方向分力fpx为零。
45.同理,再以平行于oy轴的直线将物体分为前后两部分,他们在xoz平面上的投影ay也是一样的。因此,整个表面所受oy方向的静水压力fpy 也等于零。
46.垂直分力fpz的值是不等于零的,这是因为静水压强随深度是变化的。如图5右示,今以与oz轴的直线与物体表面相切,切点形成一条封闭曲线 ebgc,曲线把物体表面分成上、下两部分。垂直分力fpz是上、下两部分曲面上垂直分力的代数和。图5(a)表示作用于上部分曲面的压力体v1,其相应的垂直压力fpz1=ρg v1,方向向下;图5(b)表示作用于下部分曲面的压力体v2,相应的垂直压力fpz2=ρg v2,方向向上。〗
47.由以上分析可知,将受压仓设计为正半球密体,且保持图5(a)的上半球稳定状态,便能从一定深度的液体中接受到垂直向下的静水压力;相反,当保持图5(b)的下半球稳定状态,便能从一定深度的液体中接受到垂直向上的静水压力。
48.图6是受压半球仓3在工况过程中更为简单扼要的示意图,对于潜在静态液体中的受压半球仓3而言,均受到半球径圆面(f2、f4)上的压力加上半球曲表面(f1、f3)上的压力;而决定受压半球仓3下潜或上潜的压力大小,唯其差额大小。
49.见图6中右侧下潜状态,f1是半球仓曲面受到的下潜压力,f2是半球径圆面的向上推力(可视为半球仓下潜所需克服阻力),因半球仓属特定几何体,其半球外曲表面积是半球径圆面积2倍,尽管作用在半球曲面上的压强有所差异,但仍有接近f2大小的压力促动半球仓下潜。
50.见图6中左侧上潜状态,由于半球仓实施180度翻转,f3是半球仓曲面受到的上潜推力,f4是半球径圆面的向下压力(可视为半球仓上潜所需克服阻力),同理,尽管作用在半球曲面上的压强有所差异,但仍有接近f4 大小的压力促动半球仓上潜。
51.至此,简明而言:除受压半球仓外成型包裹物料层,本装置的其它设计配置,只是各施其能,以确保受压半球仓3在从动旋转单元10每一周转过程中,维持其下潜、翻转或上潜的姿态对应。
52.综上理述:本发明的创新性在于,利用几何体特定之属性,运用在静态液体中,以获取尽可能多的能量转换原动力。
53.以下为易于表述和理解引用
‘
表盘’概念。
54.请参阅图7所示,导向臂6自重为沉体,轴球7自重为浮体,合二为一体时为潜体重量。导向臂6与其臂座5旋转接触面互为凹凸配置,其中臂座5端凸起半圆块,导向臂6端凸起自垂线各
±
25
°
角度块。如此特征设置是限制导向臂6在12点钟与6点钟方向时的最大摆动角度。
55.本发明装置未关连与从动旋转单元10的外接起动、停止制动等机构。
56.请参阅图8所示,在初始起动后:从0点到6点钟方向(见d1、d2、d3、 d4、d5、d6、d7、
d8、d9、d10),半球仓3处在受压下潜阶段,此时受压半球仓3的重心c与浮心d位于同一铅垂线上,且重心c在浮心d之下,因此处于潜体平衡条件而保持平稳状态,直至6点钟方向。
57.在此区间,半球仓3的整体姿态与重量平衡球35、35l、35r的位置,以及旁侧的导向臂6与轴球7的跟进,请参阅图9所示。
58.在此0点到6点钟方向区间,因轴球7自重为浮体,所以一直保持悬浮在导向臂6所限定的25
°
角止动跟随,不起作用。
59.而在此区间中,半球仓受压大小各仓在不同时钟点也不尽相同,即液下越深压强越大。图中由大到小的排序为d10、d9、d8、d7、d6、d5、d4、 d3、d2、d1。这一特性既驱动从动旋转单元10纵深跟进,也决定了其工况旋转方向。
60.在图8中可见,从6点到8点钟方向(见d11、d12、d13),受转轮架1 旋角约束,受压半球仓3进入潜升过程;在刚过6点钟方向后,原有的下潜压力改成阻力,原有的随遇平衡因逆转干扰打破,使受压半球仓3产生动摇;一方面,在旁侧的导向臂6与轴球7因受到止位块36制约,受压半球仓3转动只能向右(顺时针)。另一方面,在从动旋转单元10向心力(旋转惯力)牵引下,受压半球仓3开始向右翻转,同时促动重量平衡球35、35l、 35r(本身是沉体)向圆环形球体管道34、34l、34r右侧下滑,影响受压半球仓3整体重心c发生向右偏移,从而加速受压半球仓3向右旋转,直到重量平衡球滑到受压半球仓3圆心中垂线下方达到新的平衡状态为止,此时约为8点钟方向。
61.在此区间,半球仓3的整体姿态与重量平衡球35、35l、35r的位置,以及旁侧的导向臂6与轴球7的跟进,请参阅图10所示。
62.在此区间,因旋角特性,浮球轴球7在导向臂6支撑下一直保持紧贴半球仓右曲面,起稳导跟进辅助。
63.从8点到10点钟方向,由于转轮架1旋角特性,受压半球仓3处在平稳潜升态势。在另一方面,翻转后的受压半球仓3,其姿态是其获取最大潜升力f=半球体曲面压力
‑
半球体圆面压力,之自然力偶表现(见d14、d15、 d16)。
64.在此区间,半球仓3的整体姿态与重量平衡球35、35l、35r的位置,以及旁侧的导向臂6与轴球7的跟进,请参阅图11所示。
65.在此区间,因旋角特性,浮球轴球7在导向臂6支撑下,滑进半球外曲面底部中的弧形凹槽37中,以约束半球仓可能的倒行逆施。
66.从10点到12点方向(见d17、d18、d19、d20),随着转动角度潜升行进,因旋角特性,原有的随遇平衡又因外来干扰打破,受压半球仓3开始动摇,但由于浮球轴球7陷入弧形凹槽37单向约束,只能允许受压半球仓 3向右倾斜。另外,在从动旋转单元10向心力(旋转惯力)的牵引下,更因渐近水面,潜浮力趋零,半球体下部分曲面压强迫使半球体转动妥协,继而再次触发重量平衡球35、35l、35r向右管道滑动,移动受压半球仓3整体重心c,进一步强化翻转,直到12点钟方向。
67.在此区间,半球仓3的整体姿态与重量平衡球35、35l、35r的位置,以及旁侧的导向臂6与轴球7的跟进,请参阅图12所示。
68.从6点到12点钟方向,轴球7在导向臂6支撑下,一直紧贴悬浮在半球仓3外曲面,起稳定和跟进作用。而决定受压半球仓3在6点和10点钟方向起向圆内翻转的关键是将臂座5设置在圆内稍短周长线的轨迹上。从而确保轴球7时刻浮贴跟进和引导受压半球仓3的姿态
调整状况。
69.作为受压半球仓3外曲面一侧止位块36,仅仅是在6点钟岗位,起到单行禁令作用;而位于半球外曲面底部另一侧的弧形凹槽37,却在10点钟岗位,管制只能右转的通道。
70.由图8可见,在0点到12点钟整个周期中,由于重量平衡球35、35l、 35r(本身是沉体)始终维系铅垂下方运动,在受压半球仓3重心c和浮心d 所形成的力偶作用下,通过扭转受压半球仓角度,努力维持新的平衡。
71.受压半球仓3左右两侧小圆环形球体管道34l、34r以及重量平衡球 35l、35r的配置,起稳定半球仓姿态和促进易于翻转作用,属加分强化项。
72.受压半球仓3边缘两侧两凸转轴30,分别套装在左右转轮架上的工位左右轴承4中;工况中半球仓3接受的液下压力通过轴心传导带动转轮架1 旋转;转轮架1每旋转一周,受压半球仓3同时也自动翻转360度完成对应。
73.受压半球仓3设计为正半球密体,一是由于在几何立体形状中,圆形和球体的表面积为最大,在同深度中为受压仓体现最大压力;二是半球外形体在液体中运动所遇阻力较低。
74.从图8中可知,由0点方向到6点钟方向区间(即d1 d2 d3 d4 d5 d6 d7 d8 d9 d10)共十仓。,是半球仓受压转力区域,随着液深增加,位于下部的受压半球仓所受压强也接近倍增。为便于说明,以下数据为拟定和略计:
75.当地大气压p=98kpa
76.液体为普通水ρ=1000kg/m377.重力加速度g=9.8m/s278.转轮架直径拟定=10m(工况水深>12米)
79.受压半球体直径d=1.1m,半径r=0.55m
80.半球体外表面积=圆面积 半球外曲面积
81.=(3.14
×
r2) (2
×
3.14
×
r2)=0.95 1.90≈2.85m
82.受压水深线为半球切面圆径线,依据上述数据计算可知:
[0083][0084]
以上十仓累加取其平均压强p=592
÷
10=59.2kpa
[0085]
换算公斤单位=59.2
×
1000
×
0.1019kg/m2=6032kg/m2[0086]
由压强公式:p=f
÷
s可知f=p
×
s
[0087]
p=压强 f=作用力 s=作用面积
[0088]
从图6中可知,在0点方向到6点钟方向区间,每个半球仓所受下潜压力f=(平均压强p
×
半球外曲面积)
‑
(平均压强p
×
圆面面积)
[0089]
=(6032kg/m2×
1.9m2)
‑
(6032kg/m2×
0.95m2)
[0090]
=11460
‑
5730=5730kg
[0091]
十仓合计总压力=5730
×
10=57300kg
[0092]
换言之,从动旋转单元10在每一旋转周期内,将获57300kg持续向下压力通过受压半球仓3轴心传送予从动单元10为机械能推动其向下转动。
[0093]
同理,在6点至12点钟方向,由于半球仓转体潜升,原有的下压潜力反向倒戈转换成上潜升力。除8点到10点钟方向d14、d15、d16半球仓是获最大上潜升力外,其余d11、d12、d13,又d17、d18、d19、d20半球仓,由于处在体位转换过程,实际所得上潜升力有所折扣无疑。
[0094]
从上述数据可知,对于从动旋转单元10整体而言,共二十个受压半球仓,而参与受压传力推动旋转的有0点到6点钟方向的(d1~d10)十个仓,再加8点到10点钟方向的(d14、d15、d16)三个潜升仓推动,共有十三仓有效作功从动单元10上,占总仓数65%,这一比例也是确保从动单元10 自动连续转动的有效动力源。
[0095]
另一方面,由于从动单元10其技术特征是潜体,因此在液体中推动其转动的力矩也无需太大。
[0096]
以上数据如更改为:转轮架直径拟定加大一倍=20m(工况水深>24米)
[0097]
受压半球体直径d=2.2m,半径r=1.1m
[0098]
圆面积=3.8m
2 半球外曲面积=7.6m2[0099]
十仓累加平均压强p=1184
÷
10=118.4kpa
[0100]
换算公斤单位=118.4
×
1000
×
0.1019kg/m2=12065kg/m2[0101]
每个仓下潜压力f=(平均压强p
×
半球外曲面积)
‑
(平均压强p
×
圆面面积)=(12065kg/m2×
7.6m2)
‑
(12065kg/m2×
3.8m2)
[0102]
=91694
‑
45847=45847kg
[0103]
十仓合计总压力=45847
×
10=458470kg
[0104]
以前述转轮架直径拟定10米相比较,当转轮架直径与工况水深倍增时,受压半球仓总压力增加8倍多。
[0105]
无疑,当增大本发明装置体量相当时,其效能比是可观的。另一方面,从成本和体量上考虑,将两到叁个本发明装置以串轴心并列组合,效能数翻。
[0106]
图13示出了本发明装置的第二实施例的结构示意图。
[0107]
请参阅图13所示,图13中将输出齿轮2设在转轮架1外侧,且旁侧设有多个固定定位轴承,替代原由轴心轴承使转轮架1绕圆心转动,此另版实施目的是为旋转输出提供最短的离液面距离。
[0108]
综上所述,将本发明静态液体中利用压强差自动连续转动装置,匹配相应的起动和制动装置且连动发电机作功,便可使静态水资源转换成自然持久,成本低廉的电力能源,具有创新性、实用性、效益性。与太阳能发电,风力发电相比较,不受自然地貌约束,不受昼夜和气象变化影响,仅唯一不适用在冰冻地区或冰冻期间。
[0109]
以上所述仅为本发明的较佳实施例,凡依本发明创新权利要求范围所做的均等变化与修饰,皆应属本发明创新权利要求的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

