1.本实用新型涉及风力发电机组叶片净空监测的技术领域,尤其是指一种风力发电机组叶片净空监测装置。
背景技术:
2.随着风力发电机组容量的增大,叶片的加长,新型叶片材料的应用,叶片净空显得越来越重要。若风力发电机组叶片净空不足,则可能存在叶片与塔筒碰撞的风险,为了保证机组的安全运行,则需要实时监控叶片净空。
3.为了避免叶片扫塔筒的情况发生,采用实时测量叶片扫过塔筒时距离塔筒的距离,再通过变桨来控制叶片的变桨角度以及风轮转速,减少叶片所受的风载荷,使叶片净空距离加大以满足安全距离要求。其中,叶片净空距离是指叶片叶尖距离塔筒的距离。
4.目前净空监测方案较少,总的来说可以分为以下几种方案:
5.一、机舱安装测距仪方案:通过在机舱顶部安装测距仪测量机舱某点到叶片的距离,再通过几何关系,采用数学方法推算出叶片距离塔筒的距离。该方案缺点在于,净空值采用几何数学方法推算,并未测量出真正净空值,若存在安装偏差或测距仪后期发生移动,则推算出的净空值结果不准,存在风险性。且由于测距仪在机舱,距离叶尖较远,距离越远越容易受到干扰。
6.二、机舱安装摄像头方案:通过在机舱顶部安装摄像头,拍摄叶片到塔筒的视频,利用机器学习等方法推算出叶片距离塔筒的净空距离。此方法容易受到雨雾雪天气对可见度影响的干扰,且机器学习等方式存在一定误报性和技术不成熟性,同时视觉识别需要耗费大量计算资源,因此成本较高。
7.三、塔筒圆周方向安装多个测距雷达方案:为了在风力发电机组各偏航角度下均实现净空监测,在塔筒周围安装多个测距雷达,实现对塔筒360
°
范围覆盖监测,并通过计算各雷达的反射信号,获得叶片净空距离。该方法由于采用多个测距雷达,计算量大,导致其成本极其高昂,不利于推广。
技术实现要素:
8.本实用新型的目的在于克服现有技术的缺点与不足,提出了一种安全可靠的风力发电机组叶片净空监测装置,只通过一个测距仪跟踪偏航的方式,即可实现在各偏航角度下对叶片净空高质量的实时监测,保障机组正常运行。
9.为实现上述目的,本实用新型所提供的技术方案为:一种风力发电机组叶片净空监测装置,包括导轨、小车、测距仪、供电环和电刷;所述导轨安装在风力发电机组塔筒外侧的叶尖扫掠高度处,即能监测到叶片净空的指定高度,并缠绕塔筒一周;所述小车通过其两侧导向轮安装在导轨里,能沿着导轨移动和静止;所述测距仪安装在小车上,能够在小车的带动下围绕塔筒360
°
全方位移动,并与风力发电机组的主控系统进行双向通讯,且其测量方向与风力发电机组的传动链方向一致,即在导轨上移动时保持与风力发电机组的机舱偏
航方位角一致,从而能够精准测量叶尖与其之间的距离,进而确保计算出的叶片净空距离准确;所述供电环有两个,并分别安装在导轨两侧下方沿导轨围绕着塔筒,该两个供电环分为内、外侧供电环构成正、负极,用于给测距仪和小车供电;所述电刷有两个,并分别安装在两个供电环下方,随小车一起移动,一个电刷对应一个供电环,并与供电环接触,起到持续供电的作用,并且在小车静止时持续产生一个往供电环方向的推力,从而锁定位移。
10.进一步,所述小车包括导向轮和车架;所述导向轮有两个,并安装在车架的两侧,该两个导向轮放置在导轨上,所述导向轮的边缘低于导轨,通过转动能够带动测距仪沿着导轨移动而保证不发生脱轨;在静止时,两个导向轮往车架两侧移动,对导轨施加压力,起到卡住导轨的作用;当需要移动时,导向轮向车架中间收缩,释放压力,减少移动时的阻力,方便移动;所述车架内部安装有电磁抱闸及为导向轮提供动力的电机,所述电磁抱闸在默认情况下锁住导向轮,防止转动,并让导向轮往两侧移动,卡住导轨;当需要移动时,通电松开电磁抱闸,并让导向轮往车架中间移动,使导向轮能够在电机带动下转动。
11.进一步,所述导轨通过多个组合件固定在塔筒外侧;所述组合件包括导轨侧斜块和塔筒侧斜块,所述导轨侧斜块形成有一贯穿位,供导轨穿过,所述导轨穿过贯穿位后由导轨侧斜块承托起来,所述导轨侧斜块的斜面与塔筒侧斜块的斜面相切合,它们之间通过螺栓拧紧在一起,所述塔筒侧斜块分布在塔筒圆周径向,在螺栓拧紧过程中,所述塔筒侧斜块会往塔筒中心轴线移动,基于涨紧套原理,固定在塔筒外壁上,进而将导轨固定在塔筒外侧。
12.进一步,所述测距仪通过无线天线与风力发电机组的主控系统进行双向通讯,实现测距仪位置与机舱偏航位置相同步,保证叶片净空距离测量准确。
13.进一步,所述导轨采用分段式设计,由多段拼接而成。
14.进一步,所述供电环由导电金属组成。
15.进一步,所述导轨下方的塔筒外壁搭建有供运维人员站立巡检维护的平台,并配置有爬梯。
16.进一步,所述平台为可收纳式平台,在不使用时能够根据需求进行收纳。
17.本实用新型与现有技术相比,具有如下优点与有益效果:
18.1、成本低廉:只采用一个测距仪,并非大量测距仪或测距雷达,从而降低了成本。
19.2、方法简单:直接读取测距仪数值,通过简单计算,便能得到叶片距离塔筒的净空距离。
20.3、测量准确:测量距离是叶片距离测距仪的真实距离,加上已知的测距仪距离塔筒距离,并非通过其它方式测量距离,再通过复杂几何关系推算,测量结果更加准确。
21.4、方法可靠:由于安装在塔筒外侧,距离叶片距离较近,即使在大雪、大雨、浓雾等恶劣天气下,也可以测量出净空值。若测距装置安装在机舱处,则由于机舱距离叶尖距离较远,容易受到恶劣环境的干扰,导致测距结果不准确。
22.5、方便改造:当采用斜块等方式固定时,使用方便,可直接适用于现有风力发电机组塔筒。
附图说明
23.图1为风力发电机组叶片净空监测装置的安装示意图之一。
24.图2为风力发电机组叶片净空监测装置的安装示意图之二。
25.图3为风力发电机组叶片净空监测装置的安装示意图之三。
26.图4为风力发电机组叶片净空监测装置的安装示意图之四。
27.图5为导轨、组合件和供电环的装配图。
28.图6为导轨、组合件和供电环的装配剖视图。
29.图7为导轨侧斜块的结构示意图。
30.图8为塔筒侧斜块的结构示意图。
31.图9为小车、测距仪、电刷和无线天线的装配图之一。
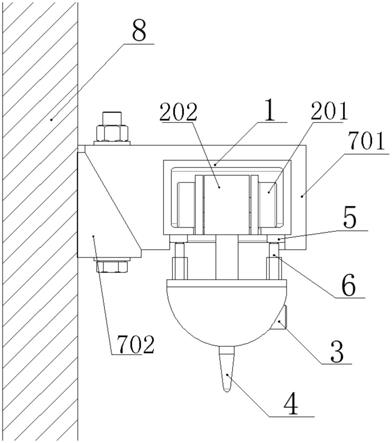
32.图10为小车、测距仪、电刷和无线天线的装配图之二。
33.图11为锁定时导向轮锁死状态图。
34.图12为移动时导向轮松开状态图。
35.图13为风力发电机组叶片净空监测装置的测距原理简示图。
具体实施方式
36.下面结合具体实施例对本实用新型作进一步说明。
37.如图1至图12所示,本实施例所提供的风力发电机组叶片净空监测装置,包括导轨1、小车、测距仪3、无线天线4、供电环5和电刷6等;
38.导轨1通过多个组合件安装在风力发电机组塔筒8外侧的叶尖扫掠高度处,即能监测到叶片净空的指定高度,并缠绕塔筒8一周,导轨1可采用分段式设计,即由多段拼接而成,这样方便制造和安装;组合件包括导轨侧斜块701和塔筒侧斜块702,导轨侧斜块701形成有一贯穿位701
‑
1,供导轨1穿过,导轨1穿过贯穿位701
‑
1后由导轨侧斜块701承托起来,导轨侧斜块701的斜面与塔筒侧斜块702的斜面相切合,它们之间通过螺栓703拧紧在一起,塔筒侧斜块702分布在塔筒8圆周径向,在螺栓703拧紧过程中,塔筒侧斜块702会往塔筒8中心轴线移动,基于涨紧套原理,固定在塔筒8外壁上,进而将导轨1固定在塔筒8外侧。
39.小车包括导向轮201和车架202;导向轮201有两个,并安装在车架202的两侧,该两个导向轮201放置在导轨1上,导向轮201的边缘低于导轨1,通过转动可带动测距仪3沿着导轨1移动而保证不发生脱轨;在静止时,两个导向轮201往车架202两侧移动,对导轨1施加压力,起到卡住导轨1的作用,保证不会轻易发生位移;当需要移动时,导向轮201向车架202中间收缩,释放压力,减少移动时的阻力,方便移动;车架202内部安装有电磁抱闸(图中未画出)及为导向轮201提供动力的电机(图中未画出),电磁抱闸在默认情况下锁住导向轮201,防止转动,并让导向轮201往两侧移动,卡住导轨1;当需要移动时,通电松开电磁抱闸,并让导向轮201往车架202中间移动,使导向轮201能够在电机带动下转动。
40.测距仪3安装在小车上,可在小车的带动下围绕塔筒360
°
全方位移动,能够测量塔筒8径向指定方向,指定区间内物体的距离,测距方式包括但不限于红外测距、激光测距、微波测距、毫米波测距、超声波测距等,其测量方向与风力发电机组的传动链方向一致,即在导轨1上移动时保持与风力发电机组的机舱偏航方位角一致,从而可精准测量叶尖与其之间的距离,进而确保计算出的叶片净空距离准确。当叶尖扫过塔筒8时,测距仪3能测量叶尖距离测距仪的距离,从而计算出净空值;当叶片没扫过塔筒8时,测量距离数值大小超过指定区间,从而判断出叶片未在塔筒方向,见图13所示,图中9为叶片,10为测距激光电磁波。
测距仪3通过无线天线4与风力发电机组的主控系统进行双向通讯,获取包括但不限于偏航方位角、偏航方向、偏航速度等信息,通过数据信息,实现测距仪位置与机舱偏航位置相同步,保证净空值测量准确。
41.供电环5有两个,并分别安装在导轨1两侧下方沿导轨1围绕着塔筒8,供电环5由导电金属组成,两个供电环5分为内、外侧供电环构成正、负极,可用于给测距仪3和小车等电气设备供电。
42.电刷6有两个,并分别安装在两个供电环5下方,随小车一起移动,一个电刷6对应一个供电环5,并与供电环5接触,起到持续供电的作用,并且在小车静止时持续产生一个往供电环5方向的推力,从而锁定位移。当需要移动时,减少推力,从而减少供电环5之间的摩擦力,方便移动。
43.为方便运维人员对上述净空监测装置进行检修维护,可在导轨1下方的塔筒外壁搭建有供运维人员站立巡检维护的平台11,并带有爬梯等能上下通行的设施,从而能够让人员对净空监测装置进行检修维护,平台11不使用时可根据需求进行收纳。
44.本实施例上述净空监测装置的具体安装如下:
45.将分段的导轨运输至平台11上方,将导向轮201、车架202、测距仪3、无线天线4、供电环5和电刷6等安装在导轨中,再将多段导轨安装起来,形成一个围绕塔筒8的圆环整体。
46.将导轨1布置在能监测叶片净空的指定高度,再拧动导轨侧斜块701和塔筒侧斜块702的螺栓703,使两个斜块相向而行,塔筒侧斜块702产生向塔筒8中心移动的位移和力分量,从而夹紧塔筒8,固定住导轨1。
47.安装完成后,接通供电环5供电,即可启动净空监测装置,进行调试。
48.下面为本实施例上述风力发电机组叶片净空监测装置的监测方法,其具体情况如下:
49.当叶片9扫过塔筒8方向时,测距仪3测量出叶片9到塔筒8的距离,并通过无线天线4向风力发电机组的主控系统发送测距数值,风力发电机组的主控系统接收到信息后,根据预先已知的测距仪3距离塔筒8位置以及测距数值计算出叶片净空距离,即叶片净空值。
50.若叶片净空值在正常区间,风力发电机组继续运行;若叶片净空值在预警区间,风力发电机组通过变桨和降低功率等方式,使得叶片净空值增加,以保障安全同时保证发电量;若叶片净空值在危险区间,则采用紧急停机等手段进行停机,保障风力发电机组安全。
51.当风力发电机组不偏航,与测距仪3处于同一方位角时,净空监测装置处于位移锁死状态;车架202内的电磁抱闸默认情况下锁死导向轮201,防止导向轮201转动,同时车架202将导向轮201往两侧移动,利用导向轮201的边缘卡住导轨1,防止左右移动,见图11所示;电刷6默认产生一个推力挤压供电环5,与导向轮201的轮面一起夹住导轨1,防止上下移动。
52.当风力发电机组偏航时,风力发电机组通过无线信号发送实时偏航方位角给净空监测装置的无线天线4;净空监测装置接收到信号后,放松电刷6对供电环5的压力,同时导向轮201向车架202中间收缩,不再卡住导轨1,并松开导向轮201的电磁抱闸,见图12所示;在车架202内电机的带动下,使导向轮201转动,沿着导轨1移动至目标处的偏航方位角;净空监测装置配有可确认当前位置的功能,以实现实时跟踪风力发电机组偏航位置,具体是可通过内置的电子指南针等计算出目前所在的方位角以及需要移动至的方位角,跟随机舱
进行偏航,保证测量的净空值准确。
53.以上所述实施例只为本实用新型之较佳实施例,并非以此限制本实用新型的实施范围,故凡依本实用新型之形状、原理所作的变化,均应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

