1.本发明涉及一种用于运行废气涡轮增压机、尤其用于其转速监控的方法。此外,本发明涉及一种控制装置、一种内燃机和一种机动车。
背景技术:
2.通常,尤其在机动车领域中已知用于内燃机的增压系统,用于给内燃机的气缸供应以带有超压的空气以用于使燃料燃烧。
3.为了提供带有超压的空气,例如涡轮增压机和压缩机是已知的。涡轮增压机具有压缩机且涡轮增压机可配备有用于压缩机的自己的驱动器、例如电动机,或者涡轮增压机例如利用内燃机的废气来运行,其中,废气驱动涡轮机,涡轮机经由轴与压缩机有效连接/联接。后者也被称作废气涡轮增压机(atl)。
4.此外例如由de 10 2018 106 780 a1已知如下,即,atl可额外具有电驱动器,以便提高和降低atl的转动速度。尤其地由此转速可被降低,当更小的增压压力被需要或增压压力过量应被防止时。在de 10 2006 000 237 a1中同样描述了一种带有马达的涡轮增压机,其中,马达基于被施加到涡轮增压机的涡轮机上的实际放出能量的延迟特性来控制,以便防止增压压力的过冲(或超调,即ueberschwingen)。由de 10 2005 040 887 a1已知如下,即,将涡轮增压机的转速经由与马达相联接的电机保持在确定的转速范围内。
5.在设计涡轮增压机时尤其须注意涡轮增压机不可超过的最大转速。在超过的情况中存在涡轮增压机的故障直至完全失效的危险。
6.由于构件公差和老化效应,涡轮增压机关于所有情境/运行点的旋转精确的调节(调控)不可被展现。传感器设备、例如涡轮增压机转速传感器出于经济原因首先在摩托车运动或者跑车领域中得到使用。
7.防止涡轮增压机损伤的鲁棒性可通过涡轮增压机的虚拟转速带来实现,虚拟转速带充当对于上述效果而言的储备。这也就是说,涡轮增压机不在其最大可能的转速上限处被运行。因此,涡轮增压机在名义上失去性能,因为由于虚拟转速带的转速限制相应限制了增压压力增长。
8.因此,例如在动态运行中涡轮增压机的调节元件(例如用于涡轮增压机的涡轮机的可变的涡轮几何形状(vtg)的调节元件和/或废气旁通阀(或废气阀门,即wastegate))被短暂打开,以便于补偿惯性引起的过转速。在功能和适用性上,这样的方法对精度提出了极高要求,从而此处形成了高的费用。
技术实现要素:
9.本发明的目的是提供一种至少部分克服上述缺点的方法。
10.该目的通过一种根据权利要求1的方法、通过一种根据权利要求13的控制装置、通过一种根据权利要求14的内燃机和一种根据权利要求15的机动车来实现。本发明的另外的有利的设计方案由从属权利要求和本发明的优选的实施例的下面的说明得知。
11.根据第一方面,本发明提供了一种用于运行内燃机的废气涡轮增压机(atl)的方法,其中,atl与电机有效连接且atl的转速可经由电机来调整。该方法包括:
‑ꢀ
测定内燃机的静态或动态的运行状态;和
‑ꢀ
经由电机降低atl实际转速以便遵守atl的转速上限,其中,电机取决于内燃机的运行状态来运行。
12.监控、调整、操控、控制、调节的概念与本发明相联系不仅包括在真正意义上的控制(不带有反馈)而且包括调节(带有一个或多个调节回路)。
13.atl与电机有效连接,只要电机可影响于atl的转速,如例如在电辅助的废气涡轮增压机中那样。电机因而与atl尤其直接地相联接且可作为马达或发电机来运行。电机在马达运行中可通过由其所产生的转矩增长或降低atl转速,而在发电机运行中可例如作为再生制动降低atl转速。
14.内燃机至少可在两种运行状态中被运行,一方面在静态状态(尤其全负荷运行状态)中和在动态运行状态中,以便于实现驾驶员期望、尤其加速期望。内燃机的运行状态的测定/检测一般而言借助内燃机的不同运行参数且借助与其相关联的部件(例如废气涡轮增压机)的运行参数实现。
15.atl转速上限相应于atl基于构件特性不可长期超过的最大允许的atl转速,以便于避免构件损伤例如atl的部件(尤其其工作轮)的蠕变(flie
ß
en)。
16.为了遵守该atl转速上限,atl实际转速借助于电机、尤其通过其马达运行被降低。在此,对于电机到atl转速中的干预而言决定性的是内燃机的经测定的运行状态。因为视是否存在静态或动态的运行状态而定,电机被相应地运行或者调整。换而言之,视运行状态而定,另一控制(操控)作用到电机上。此外电机仅干预用于减少atl转速。
17.因而atl的转速过冲可以如下方式被防止,即,电机相应地作用到atl转速上。该转速过冲例如由atl工作轮的质量惯性导致。
18.利用上述方法可实现,使atl靠近其转速上限运行,而不设有上述虚拟转速带形式的截止作为用于构件保护的转速储备。因此,atl的全部转速带可被充分利用,由此实现atl的名义上的性能的(几乎)完全的利用。
19.在另外的方法变型方案中,电机可经由第一调节装置来控制,当存在静态的运行状态时,且经由第二调节装置来控制,当存在动态的运行状态时。此处,用“调节”也可表示控制(操控)。因此,电机可适配于内燃机的相应的运行状态地被相应地运行或者调整。因此,电机可被相对更差异化地调整。
20.此外,第一调节装置可具有用于降低atl实际转速的第一调节部件和第二调节部件。第一和第二调节部件可取决于实际增压转速和atl实际转速的迟滞特性干预/作用。由此,对于静态的运行状态而言可额外相对更差异化地运行电机。
21.此外,atl的转速上限可以是第一和第二调节部件的控制参数(fuhrungsgroe
ß
e)。
22.在另外的方法变型方案中,在内燃机的动态运行状态中电机可取决于atl的质量惯性和/或增压压力结构的惯性来运行。增压压力结构的惯性例如由在内燃机的气体路径中的延迟、即例如由于在(atl的)压缩机与气缸入口之间的距离而产生。由此,电机的干预可被相对更精确地调整,以便补偿转速过冲。尤其地,电机可鉴于干预时间点、干预时长和/或干预强度(即通过电机降低atl转速)来调整。
23.在方法变型方案中,atl的质量惯性和增压压力结构的惯性可借助于特征曲线来考虑到。这些特征曲线(亦或特征线)可例如根据经验在试验台处或通过数学模型来测定。
24.此外,内燃机的动态运行状态可存在或者被确定,当增压压力调节偏差大于经预先确定的最小压力差且预测的增压压力调节偏差大于经预先确定的极限压力时。增压压力调节偏差相应于额定增压压力与实际增压压力之间的差,其中,额定增压压力用于实现驾驶员期望(即用于达到额定马达力矩)且因此同样可由驾驶员期望被推导出。实际增压压力一般而言经由相应布置在内燃机的空气线路中的压力检测装置来检测。为了确定内燃机的动态运行状态,增压压力调节偏差须超过经预先确定的最小压力差。这就此而言是必要的,以便与相对较小的增压压力调节偏差区分开,该相对较小的增压压力调节偏差也可能在内燃机的静态运行状态中在增压压力的调准期间出现。对于动态运行状态的存在而言的另一条件可以是如下,即,预测的增压压力调节偏差超过经预先确定的极限压力,其中,极限压力的超过是增压压力(超过额定增压压力)的过冲。当两个条件被满足时,存在内燃机的动态运行状态。
25.此外,内燃机的静态运行状态可存在或者被确定,当增压压力调节偏差小于经预先确定的最小压力差和/或预测的增压压力调节偏差小于经预先确定的极限压力时。
26.在方法变型方案中,预测的增压压力调节偏差可取决于增压压力梯度被测定。增压压力梯度此处是实际增压压力的时间变化。由增压压力梯度可推导出atl工作轮的运动学,尤其在考虑质量惯性的情形下。
27.此外,atl实际转速可经由电机来检测。通过电机和与其相连接的传感装置(尤其转速检测装置)的可支配性可实现,精确地检测atl的轴转速和其变化。由此,电机为了atl的转速调节可被相对更精确地调整。
28.在一种备选方案中,atl可具有调节组件、尤其可变的涡轮几何形状和/或废气旁通阀。在此实现当调节组件在敞开的极限位置中被调整时经由电机降低atl实际转速。在此以敞开的极限位置表示如下,即,调节组件被如此地调整,使得在可变的涡轮几何形状的情形中对于废气而言的流动横截面最大而在废气旁通阀的情形中其阀被最大程度地打开,以便围绕涡轮机引导尽可能多的废气。
29.根据第二方面,本公开内容提供了一种用于内燃机的atl用的控制装置,其中,该控制装置被设置用于实施根据前述权利要求中任一项所述的方法。
30.根据第三方面,本公开内容提供了一种带有atl和根据第二方面的控制装置的内燃机。
31.根据第四方面,本公开内容提供了一种带有根据第三方面的内燃机的机动车。
附图说明
32.本发明的实施例现在示例性地且在参考附图的情况下进行描述。其中:图1示意性地示出了带有内燃机的机动车的一个实施例;图2a,2b示出了废气涡轮增压机的静态和动态的转速调节的输入参数和输出参数;图3a
‑
c示意性地示出了静态的转速调节、借助于电机的转速调节和热力学的调节;
图4示意性地示出了动态的转速调节;且图5a,5b示出了对于增压压力、对于废气涡轮增压机的转速和对于废气涡轮增压机的调节元件而言的示意性曲线。
具体实施方式
33.图1示出了带有马达3(内燃机)和废气涡轮增压机(atl)形式的由控制装置21来控制的增压系统9的机动车1。控制装置21构造成马达控制器。
34.本发明不被限制于一种确定的马达类型。其可以是内燃机,该内燃机可例如构造成汽油机或柴油机。
35.马达3包括一个或多个气缸4,其中此处示出一个。气缸4由atl9被供应以经增压的(燃烧)空气。atl9包括压缩机3,其经由带有可变的涡轮几何形状(vtg)的涡轮机(废气涡轮机)15的轴14被驱动或者被运行。涡轮机15因而经由轴14与压缩机13有效连接/联接。压缩机13布置在至马达3的空气线路5中且涡轮机15布置在将废气从气缸4中排出的废气线路7中。因此,压缩机13可以如下方式利用马达3的废气来运行,即,涡轮机15被供应以来自马达3的废气且由此被驱动。此外,atl9与控制装置21相联接。
36.vtg可经由调节机构17来调整。相对于vtg备选地/补充地设置有废气旁通阀19。经由调节机构17(和/或经由废气旁通阀19),被供应给涡轮机15的废气且相应地压缩机13的功率可被调整。可选地也可设置有多级增压的总成。换而言之也可设置有多个atl9。
37.此外,atl9具有电机11。电机11具有作为马达和作为发电机的功能且与atl9的轴14相联接/有效连接。电机11尤其被构造成用于测量atl9的转速。在此,可以用atl9的转速表示轴14的转速、压缩机13的转速和/或涡轮机15的转速。此外,电机11可构造成用于将转矩施加到atl9上。由此,atl9的转速可经由电机11被提高和/或被降低。控制装置21与电机11相联接。由此,电机11可被调整/控制且可读出atl9的由电机11所检测的转速。换而言之,atl9的由电机11所检测的转速信号由控制装置21来处理。
38.尤其地,电机11可与轴14被集成。这例如以如下方式来实现,即,电机11的(未示出的)转子构造为轴14a的部分,其中,电机11的(未示出的)定子围绕轴14的构造为转子的部分布置在固定位置中。
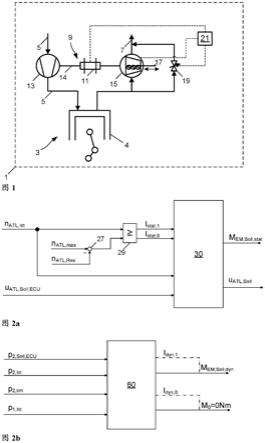
39.图2a和2b示出了对于马达3的atl9的静态或者动态的转速调节装置30,50。静态的转速调节装置30在马达3的静态的运行状态中起作用而动态的转速调节装置50在马达3的动态的运行状态中起作用。
40.如由图2a显而易见的那样,atl实际转速n
atl,ist
、atl最大转速n
atl,max
(即atl的最大允许转速、尤其鉴于构件损伤)、atl的储备转速带n
atl,res
和对于atl9的调节元件(调节机构17和/或废气旁通阀19)而言的由控制装置21计算出的额定值u
atl,soll,ecu
是对于静态的转速调节装置30的输入参数。
41.在此,一些输入参数直接到达静态的转速调节装置30中,例如atl实际转速n
atl,ist
或被预先处理/计算,例如最大允许atl转速n
atl,max
和储备转速带n
atl,res
。由静态的转速调节装置30可产生待由电机11产生的额定力矩m
em,soll,stat
和用于atl9的调节元件的额定值u
atl,soll
作为输出参数。
42.在方框29中检测是否atl实际转速n
atl,ist
大于在atl最大转速n
atl,max
与储备转速带
n
atl,res
之间的差。该差在求和点27中形成,其方式为,atl最大转速减去储备转速带n
atl,res
。该差相应于atl9的开头所提及的虚拟转速带,该虚拟转速带相应于atl9的由控制装置21经(预先)确定的允许转速范围。借助于atl9的虚拟转速带,atl9因而鉴于其转速、尤其向上被截止。
43.假如atl实际转速n
atl,ist
大于该差,由方框29得知干预信号i
stat,1
。否则由方框29得知不干预信号i
stat,0
。这两个信号i
stat,1
和i
stat,0
被用于确定是否(之后所描述的)转速调节装置(em调节装置)40借助于电机11作用或不作用。
44.由图2b显而易见的是,由控制装置21计算出的额定增压压力p
2,soll
、实际增压压力p
2,ist
、极限压力p
2,lim
和在压缩机之前的实际压力p
1,ist
充当动态转速调节装置60的输入参数。在此,增压压力实际值p
2,ist
和在压缩机之前的实际压力p
1,ist
可例如由相应布置的(未示出的)压力传感器来检测。备选地和/或补充地,由其可推导出压力值p
1,ist
和p
2,ist
的其它参数可由相应的(未示出的)传感器来检测,从而使得控制装置21可测定压力值p
1,ist
和p
2,ist
。视是否动态的转速调节装置60作用或不作用而定,(电机11的)经测定的额定力矩m
em,soll,dyn
或者马达零力矩m0作为输出参数由动态的转速调节装置60得知。动态的调节装置60之后详细进行描述。
45.图3a示出了静态的转速调节装置30的热力学的调节装置50和em调节装置40。此外,静态的转速调节装置30具有激活方框31,在其中确定是否em调节装置40作用。激活方框31作用/被调用,假如干预信号i
stat,1
到达静态的转速调节装置30中。激活方框31包括两点调节器35,以便展示含有迟滞的切换。两点调节器35作为输入参数具有atl实际转速n
atl,ist
。两点调节器35的上切换点是atl最大转速n
atl,max
而下切换点是在atl最大转速n
atl,max
与经预先确定的切换差
∆
n
hys
之间的差。下切换点在求和点33中以如下方式被测定,即,将经预先确定的切换差
∆
n
hys
从atl最大转速n
atl,max
减去。切换差
∆
n
hys
如此来选择,使得其小于储备转速带n
atl,res
。两点调节器35输出信号i
hys,1
,当atl实际转速n
atl,ist
超过上切换点时,并且输出信号i
hys,0
,当atl实际转速n
atl,ist
低于下切换点时。如果输出信号i
hys,1
,则em调节装置40作用。与之相反如果输出信号i
hys,0
,热力学调节装置50作用。
46.在图3b中详细示出了em调节装置40。在求和点41中,atl转速调节偏差
∆
n
atl
以如下方式被确定,即,atl最大转速n
atl,max
减去atl实际转速n
atl,ist
。经由例如构造为pi调节器的调节器43,atl转速调节偏差
∆
n
atl
被调节掉(即调节到大致为“零”的值),其方式为,调节器43输出em调节参数u
em
,其调整由电机11所产生的力矩。em调节参数u
em
被传送到方框45处,该方框说明取决于em调节参数u
em
的、待由电机11产生的转矩m
em,u
。当atl转速调节偏差
∆
n
atl
是正的时,em调节参数u
em
如此地通过调节器43来确定,使得m
em,u
是正的。电机11因而如此运行,使得atl转速增长。当atl转速调节偏差
∆
n
atl
是负的时,相应地产生负的m
em,u
,利用其减小atl转速。
47.然而,仅负的调节偏差应被调节掉,即atl转速不增长。这通过方框47来实现。取决于em调节参数的力矩m
em,u
和零力矩m0充当用于方框47的输入参数。在方框47中作用有如下逻辑,其仅传送m
em,soll,stat
的最小输入值作为输出参数。因此确保如下,即,仅小于或等于零的值产生作为电机11的额定力矩m
em,soll,stat
作为来自方框47(且由此来自em调节装置40)的输出参数。换而言之,借助于方框47由em调节装置40仅减小而非增长atl转速。
48.热力学调节装置50在图3c中被示出。如上面所提及的那样,当由两点切换器
(zweipunktschalter)35输出参数i
hys,0
时,热力学调节装置50作用。此外,当之前已由方框29输出不干预信号i
stat,0
时,热力学调节装置50作用。
49.在热力学调节装置50中,atl调节元件额定值u
atl,soll
依据由控制装置21所测定的调节元件额定值u
atl,soll,ecu
和atl转速调节偏差
∆
n
atl
来确定。由控制装置21所测定的调节元件额定值u
atl,soll,ecu
可例如由驾驶员期望推导出。特别地,驾驶员期望通过马达3的相应的转矩来实现,该转矩又要求额定增压压力p
2,soll
。由控制装置21所测定的控制元件额定值u
atl,soll,ecu
如此地调整atl9,使得达到该额定增压压力p
2,soll
,然而与atl转速无关。该调节元件额定值u
atl,soll,ecu
因而充当用于热力学调节装置50的预控制值。
50.在求和点51中,atl转速调节偏差
∆
n
atl
(如上面所描述的那样)被确定。调节器55(例如pi调节器)调节掉该atl转速调节偏差
∆
n
atl
,其方式为,该调节器确定基于调节器的atl调节元件额定值u
atl,soll,reg
。在求和点53中,该基于调节器的atl调节元件额定值u
atl,soll,reg
与由控制装置21所测定的调节元件额定值u
atl,soll,ecu
来结算。由此,在求和点53中确定atl调节元件额定值u
atl,soll
,其是热力学调节装置50的输出参数。此处,两个额定值的结算被示出为减法。在求和点53中的加法也是可设想的,当调节器55相应地测定基于调节器的atl调节元件额定值u
atl,soll,reg
时。
51.通过基于调节器的atl调节元件额定值u
atl,soll,reg
,预控制值(即由控制装置21所测定的调节元件额定值u
atl,soll,ecu
)以因子来修正,从而使得atl实际转速n
atl,ist
跟踪最大atl转速n
atl,max
。尤其地,预控制值u
atl,soll,ecu
因而降低以一定偏移(减量),以便于尽可能衰减atl转速n
atl,max
的过冲且将atl实际转速n
atl,ist
调整到atl最大转速n
atl,max
上。
52.热力学调节装置50与em调节装置4并行工作,其中,视atl转速前者或后者作用而定,也就是说其输出参数被用于atl9的转速调节。当产生信号i
hys,1
时,em调节装置40作用,而当产生信号i
stat,0
和i
hys,0
时,热力学调节装置50作用。因此可实现在em调节装置40与热力学调节装置50之间的高动态切换。
53.在图4中详细示出了atl9的动态的转速调节装置60。在相除点61中,关于压缩机13的额定压力比例p
21,soll
以如下方式形成,即,额定增压压力p
2,soll
除以在压缩机13之前的实际压力p
1,ist
。此外,在方框63中到达的实际增压压力p
2,ist
被求微分且输出实际增压压力p
2,ist
的增压压力梯度p
2,grad
。为此,方框63可例如被设计成dt1元件。借助于增压压力梯度p
2,grad
,在增压压力结构中的延迟可例如基于存在于空气线路5中的经预压缩的空气的惯性、atl9的质量惯性和/或atl9的加速工作(hochlaufen)被考虑到和被预测。
54.此外,借助于关于特征曲线65,87的增压压力梯度p
2,grad
可确定电机11的干预时长t
em
和额定力矩m
em,soll,dyn
。在此,干预时长t
em
说明电机11产生额定力矩m
em,soll,dyn
多久或换而言之用于影响atl转速的电机11的力矩干预进行多久。因此,利用关于压缩机13的额定压力比例p
21,soll
和增压压力梯度p
2,grad
可由特征曲线65确定干预时长t
em
或者由特征曲线87确定额定转矩m
em,soll,dyn
。在此,特征曲线87借助于根据经验在试验台所测定的数据被建立,从而使得atl9、尤其其工作轮的质量惯性可被考虑到且atl9的加速工作或者atl转速可被预测。由此可相应地确定额定转矩m
em,soll,dyn
,其须作用到atl9上,以便不超过最大atl转速n
atl,max
。相对于特征曲线87补充地/备选地也可行的是,经由相应的质量惯性计算取决于atl9的工作轮的动能测定额定转矩m
em,soll,dyn
。
55.此外,在动态的转速调节装置60中测定是否转速调节应通过电机11作用。为此检
验是否存在马达3的动态的运行状态。对此在求和点73中形成增压压力调节偏差
∆
p2,其方式为,额定增压压力p
2,soll
减去实际增压压力p
2,ist
。增压压力调节偏差
∆
p2在方框75中与最小压力差
∆
p2,min相比较。当增压压力调节偏差
∆
p2超过一般而言为在450与550mbar之间、例如500mbar的最小压力差
∆
p2,min时,存在马达3的动态运行。对于最小压力差
∆
p2,min而言的其它的值或者值范围也可行。
56.还检验,是否在增压压力的调整期间对于增压压力p2的过冲而言的极限压力p
2,lim
预计被超过。为了预测增压压力曲线,在求和点67中实际增压压力p
2,ist
与增压压力梯度p
2,grad
被加载/相加。由求和点67得知预测的增压压力p
2,pred
。紧接着,在求和点67中额定增压压力p
2,soll
减去预测的增压压力p
2,pred
,从而测定预测的增压压力调节偏差
∆
p
2,pred
。在方框71中检查是否预测的增压压力调节偏差
∆
p
2,pred
超过对于增压压力过冲而言的极限压力p
2,lim
。
57.为了使动态的转速调节装置60输出干预信号i
dyn,1
,须满足两个条件。因此须由方框71得知如下,即,预测的增压压力调节偏差
∆
p
2,pred
大于对于增压压力过冲而言的极限压力p
2,lim
。此外须由方框75得知如下,即,增压压力调节偏差
∆
p2大于最小压力差
∆
p2,min。如果两个条件被满足,方框77输出干预信号i
dyn,1
且否则输出“不干预”信号i
dyn,0
。
58.当方框71输出干预信号i
dyn,1
时,该干预信号被传送到方框79处,方框79在输入侧此外接收干预时长t
em
。在方框79中确定干预信号是否i
dyn,1
在干预时长t
em
内由方框77输出。如果是,方框79又输出干预信号i
dyn,1
且否则输出“不干预”信号i
dyn,0
。
59.如果由动态的转速调节装置得知干预信号i
dyn,1
,则电机11被如此地运行,以便产生相应的额定力矩m
em,soll,dyn
且由此影响atl转速。然而如果得知“不干预”信号i
dyn,0
,输出马达零力矩m0且不运行电机11。换而言之,电机11不影响atl转速。
60.如果存在“不干预”信号i
dyn,0
,静态的转速调节装置30又作用,静态的转速调节装置与动态的调节装置60并行工作。同样地此处,通过静态的调节装置30和动态的调节装置60的并行工作又可实现在其之间借助于信号i
dyn,1
,i
dyn,0
的高动态的“切换”。
61.图5a示出了在马达3的静态的运行状态期间对于额定和实际增压压力p
2,soll
,p
2,ist
而言和对于额定和实际atl转速n
atl,soll
,n
atl,ist
而言的曲线。这些曲线关于时间来绘制。额定增压压力p
2,soll
通过水平线来示出,实际增压压力p
2,ist
尤其大致波浪状地围绕该水平线波动。然而,实际增压压力p
2,ist
被大致调整。实际atl转速n
atl,ist
的曲线同样地且尤其大致呈波浪状地波动。此外,鉴于atl转速还示出了最大允许atl转速n
atl,max
和储备转速带n
atl,res
。
62.图5a展示了在其中上面所提及的静态的转速调节装置30尚未干预的曲线,且尤其地图解说明了在哪些时间段中em调节装置40或热力学调节装置50应作用。这种时间段可例如处在十分之一秒的范围中。在此,当实际atl转速处在储备转速带n
atl,res
之下时,则热力学调节装置50是激活的。如果实际atl转速n
atl,ist
与之相反处在储备转速带n
atl,res
之上,则em调节装置40是激活的。
63.图5b示出了在马达3的动态运行状态期间对于额定和实际增压压力p
2,soll
,p
2,ist
而言和对于额定和实际atl转速n
atl,soll
,n
atl,ist
而言的曲线。此外示出了待由电机11产生的额定力矩m
em,soll,dyn
的曲线。额定力矩m
em,soll,dyn
因而上升,以便如此地作用于atl实际转速n
atl,ist
,使得atl实际转速在atl加速行驶的情形中不超过最大的atl转速n
atl,max
。
64.附图标记清单:1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机动车3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
内燃机(马达)4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
气缸5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
空气线路(气体路径)7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
废气线路(废气路径)9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
废气涡轮增压机(atl)11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电机13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
压缩机14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
涡轮机17
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
用于vtg的调节机构19
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
废气旁通阀21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制装置27
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
求和点29
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
比较方框30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
静态调节装置33
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
求和点35
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
两点切换器40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
通过电机的调节装置43
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方框(例如pi调节器)45,47
ꢀꢀꢀꢀꢀ
方框50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
热力学调节装置53
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
求和点55
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方框(例如pi调节器)60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
动态调节装置61
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
相除点63
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方框(例如dt元件)65
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
特征曲线67, 69
ꢀꢀꢀꢀꢀꢀ
求和点71
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方框73
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
求和点75,77,79 方框87
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
特征曲线n
atl,ist
ꢀꢀꢀꢀꢀꢀ
atl实际转速n
atl,max
ꢀꢀꢀꢀ
最大允许atl转速n
atl,res
ꢀꢀꢀꢀ
atl储备转速带
∆
n
atl
ꢀꢀꢀꢀ
atl转速调节偏差u
atl,soll,ecu
ꢀꢀꢀꢀ
由控制装置21所计算的对于atl调节元件的额定值
u
atl,soll,reg
ꢀꢀꢀꢀꢀ
对于atl调节元件的基于调节器的额定值u
atl,soll
ꢀꢀꢀꢀ
atl调节元件额定值u
em
ꢀꢀꢀꢀꢀꢀꢀ
用于电机的调节参数i
dyn,1
ꢀꢀꢀꢀꢀ
来自动态调节装置的干预信号i
dyn,0
ꢀꢀꢀꢀꢀ
来自动态调节装置的“不干预”信号i
hys,1
ꢀꢀꢀꢀꢀ
来自两点切换器的信号i
hys,0
ꢀꢀꢀꢀꢀ
来自两点切换器的信号i
stat,1
ꢀꢀꢀꢀꢀ
来自静态调节装置的干预信号i
stat,0
ꢀꢀꢀꢀꢀ
来自静态调节装置的“不干预”信号m
em,soll,dyn
ꢀꢀꢀꢀꢀ
来自动态调节装置的电机的额定力矩m
em,soll,stat
ꢀꢀꢀꢀ
来自静态调节装置的电机的额定力矩m
em,u
ꢀꢀ (电机)转矩p
1,ist
ꢀꢀꢀꢀꢀ
压缩机的实际压力p
2,grad
ꢀꢀꢀ
增压压力梯度p
2,ist
ꢀꢀꢀꢀꢀ
实际增压压力p
2,lim
ꢀꢀꢀꢀ
对于过冲的极限压力p
2,lim
ꢀꢀꢀꢀ
最小压力差p
2,soll
ꢀꢀꢀꢀ
额定增压压力p
21,soll
ꢀꢀ
对于经由压缩机的压力比的额定值
∆
p2ꢀꢀꢀꢀꢀꢀꢀ
增压压力调节偏差
∆
p
2,pred 预测的增压压力调节偏差t
em
ꢀꢀꢀꢀꢀꢀꢀ
干预时长。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

